插电式并联混合动力汽车仿真与能量管理策略
2022-05-23 04:52张湘湖金玉秀赵岩
内燃机与动力装置 2022年2期
张湘湖,金玉秀,赵岩
烟台芝罘公路建设养护中心,山东烟台 264004
0 引言
随着全球石油资源的不断消耗以及环境污染日益严重,零污染车辆受到更多的关注[1-4],汽车电气化成为一个热门话题。由于电动汽车关键技术没有得到解决,如电车寿命有待提高、配套基础设施不完善等[5],混合动力汽车是满足更清洁、更环保汽车需求的解决方案之一[6-7]。混合动力汽车包含两个或多个动力源,因此能量管理系统是混合动力汽车不可缺少的组成部分。通过适当的能量管理策略,混合动力汽车可以通过多种动力源之间的合作高效运行,减少燃料消耗和温室气体排放[8-9]。
仿真技术是汽车研发过程中的重要手段,虞卫飞等[10]采用Simulink平台研究了双电机串联混动系统的动力性和经济性;韩艳艳[11]通过AMESim和Simulink联合仿真设计了混合动力汽车的仿真平台,实现对发动机油耗和电池耗电量进行预测;白军伟[12]通过Cruise 和Simulink 软件主要对混合动力汽车的经济性进行了仿真。
本文中以某款插电式并联混合动力汽车为研究对象,基于AMESim搭建整车仿真模型,设计能量管理控制策略,预测发动机油耗和电池电量,为整车能量管理和控制奠定基础。
1 整车物理模型搭建
1.1 整车基本参数
搭建整车物理模型需要搭建整车的各个子模型。插电式并联混合动力汽车结构如图1示。插电式并联混合动力汽车的发动机驱动系统为主动力源,电驱动系统为辅助动力源,发动机和电动机通过动力耦合装置叠加。中速行驶时混合动力汽车发动机的燃油经济性最佳,因此能量管理策略为:在车速较低时,关闭发动机,由电池组向汽车输出能量;当车速较高时,发动机驱动车辆并为蓄电池充电,电池充满时,停止充电。混合动力电动汽车整车控制器根据油门踏板和制动踏板信号确定驾驶员的操作指令。整车主要技术性能参数如表1所示。

图1 混合动力汽车系统结构简图

表1 整车主要技术参数
1.2 发动机模型
发动机作为混合动力汽车的主要动力源,直接影响整车的动力输出,其模型的准确性至关重要。考虑到发动机模型参数难以准确获取,通常是将静态模型应用于混合动力电动汽车的仿真中。
当高压电池处于亏电状态时,发动机需单独运行维持车辆的最高车速,因此,发动机的最大功率应不小于车辆保持最高车速所需的功率:
(1)
式中:Pmax为发动机最大功率,kW;ie为变速箱的传动比;f0、f1、f2为滑行阻力因数;vmax为最高车速,km/h。
1.3 驱动电机模型
对于并联式混合动力汽车,纯电动模式下驱动电机是车辆唯一动力来源,最大转矩应满足车辆在纯电模式下的动力性能要求(加速性能,爬坡能力等):
(2)
Tp2i1stie≥(mgsin(atan(dmax))+f0+f1v+f2v2)R,
(3)
式中:Tp2为驱动电机最大转矩,N·m;i为变速箱速比;i1为变速箱一挡速比;m为车辆质量,kg;g为自由落体加速度,g=9.8 m/s2;a为车辆加速度,m/s2;vt为目标车速,km/h;v为实际车速,km/h;ta为目标加速时间,s;R为车轮半径,m;dmax为最大爬坡度,%。
在混合动力汽车电机达到最高转速时,需保证驱动电机在正常转速区间内运行,即其对应转速应低于最高转速:
(4)
式中:np,max为电机最高转速,r/min;it为变速箱的最高挡速比。
1.4 传动系速比模型
在混合动力汽车电机达到最高转速时,需保证发动机和驱动电机运行在正常转速区间内,即除满足式(4)外,发动机转速需低于最高转速:
(5)
式中:ne,max为发动机最高转速,r/min。
当高压电池处于亏电状态时,发动机单独工作且需达到车辆最高车速,发动机最大转矩应不小于车辆保持最高车速所需的车轮转矩:
Te,maxitie≥(f0+f1vmax+f2vmax2)R,
(6)
其中:Te,max为发动机最大转矩,N·m。
当高压电池电量较高时,车辆低速爬坡,发动机和驱动电机的输出功率需满足最大爬坡度要求,发动机和驱动电机的最大转矩之和应不小于车辆保持最大爬坡度所需的转矩:
(Te,max+TP2)itie≥(mgsin(atan(dmax))+f0+f1v+f2v2)R。
(7)
1.5 动力电池模型
动力电池电量应满足纯电工况下续航里程要求,可按照等速法计算其所需电量。汽车等速行驶所需功率
(8)
式中:vetc为汽车等速行驶速度,km/h;f为滑行阻力系数;ηt为传动系总效率;CD为空气阻力系数;A为迎风面积,m2。
电机功率
Pm=Petc/ηm,
(9)
式中ηm为电机效率。
续航里程所需总能量
Wroad=Pmt=PmL/vetc=Wbεsos,
(10)
式中:t为行驶时间,h;L为续航里程,km;Wb为电池所需能量,kW;εsos为电池组放电深度,εsos=0.85。
电池容积
(11)
式中:Ub为输入电压,V。
根据式(1)~(10)计算,动力系统匹配参数如表2所示。

表2 动力系统参数匹配结果
2 整车仿真模型的建立
2.1 能量管理策略
搭建的插电式混合动力汽车仿真模型能量管理有4种工作模式,能量管理策略流程如图2所示。
1)纯电动模式:当车速较低且电池电量充足时采用,车辆需求转矩由驱动电机提供。
2)发动机运行模式:车速较低且电池剩余电量低于阈值,或者车速较高时启用。
3)混合动力工况:车辆需求转矩大于发动机输出最佳转矩时,发动机输出最佳转矩,驱动电机提供剩余需求转矩,汽车由发动机和驱动电机共同驱动;车辆需要的转矩低于发动机的最佳转矩时,汽车进入行驶充电模式,发动机按照最佳转矩输出,多余转矩带动驱动电机发电;当车辆输出加速命令大于具体参数0.85且需求转矩大于驱动电机最大转矩时,车辆需求转矩主要由发动机提供,驱动电机提供剩余转矩。
4)制动能量回收:当制动力矩大于0,汽车进入制动控制状况,此时驱动电机作为发电机使用,回收制动动能并给电池充电。
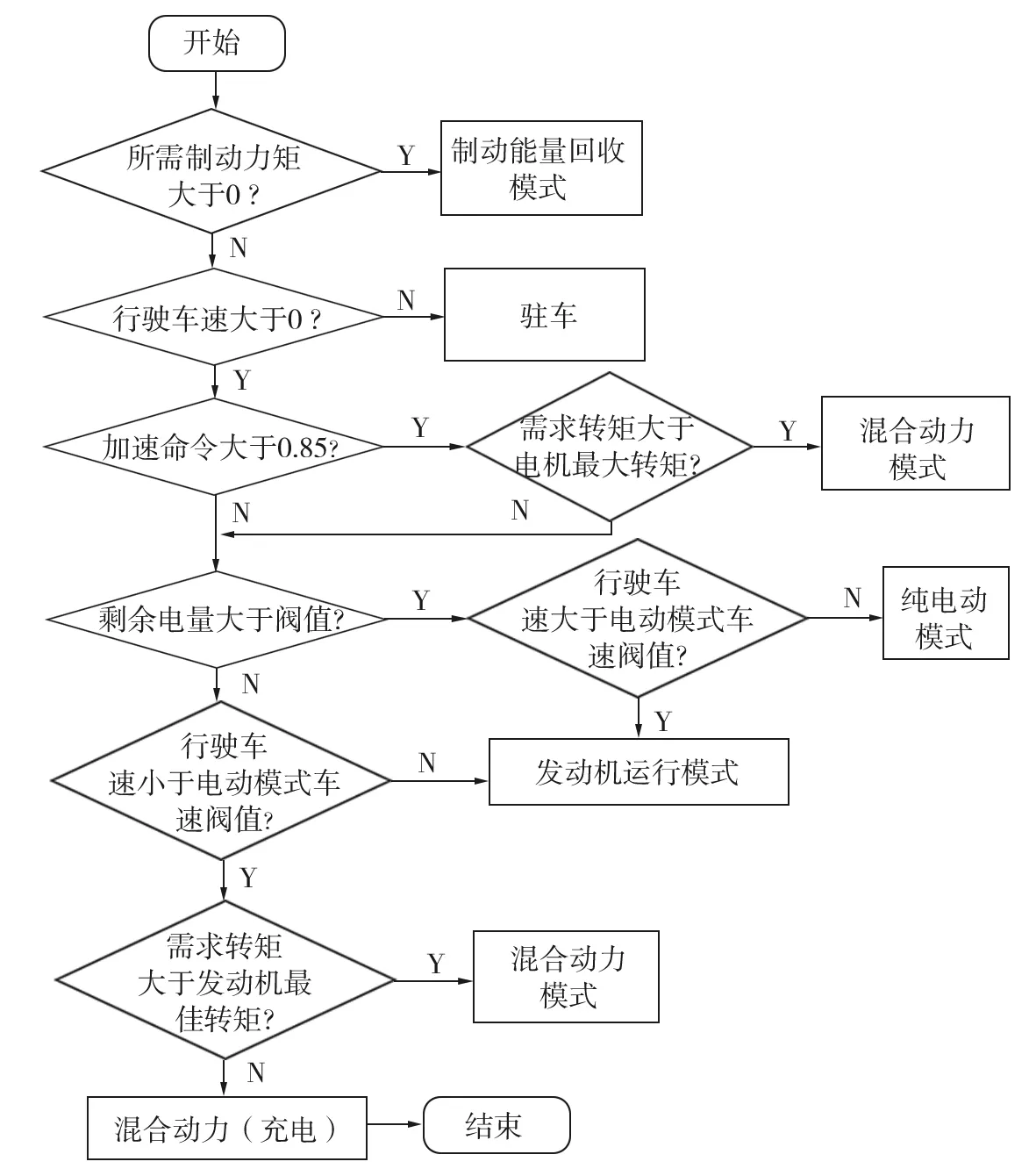
图2 能量管理策略流程图
2.2 基于AMESim的整车物理模型
通过AMESim搭建整车的物理模型,如图3所示。该模型由驾驶模块、发动机模块、电池模块、车辆控制单元、变速器模块、电机模块等组成。

图3 混合动力汽车仿真模型
能量管理策略为逻辑门限值,当低速行驶时车辆动力来源主要由电动机提供,同时发动机处于最佳转矩区域。
车辆控制单元为整车逻辑控制,可以实现车辆转矩需求、电机转矩需求、制动能量回收方案等功能。
3 仿真结果与分析
3.1 经济性仿真
循环工况下的经济性是汽车设计的重要指标之一,本文中对全球轻型车辆测试循环(worldwide harmonized light vehicles test cycle,WLTC)、日本JC08工况进行仿真,并分析不同工况下的仿真车速对实际控制车速的跟随情况、电池荷电状态(state of charge,SOC)变化以及油耗变化。
WLTC工况、JC08工况下,混合动力汽车与传统燃油汽车的车速跟随曲线、混合动力汽车电池SOC变化曲线、混合动力汽车与传统燃油汽车的油耗对比曲线如图4~9所示。
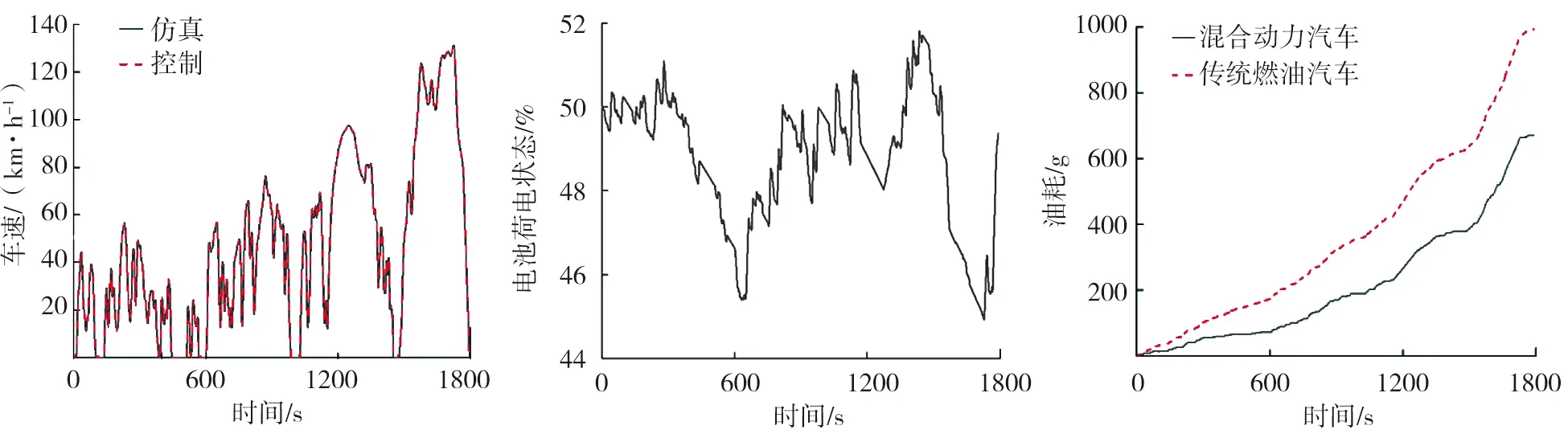
图4 WLTC工况车速跟随曲线 图5 WLTC工况电池SOC变化曲线 图6 WLTC循环工况油耗对比曲线
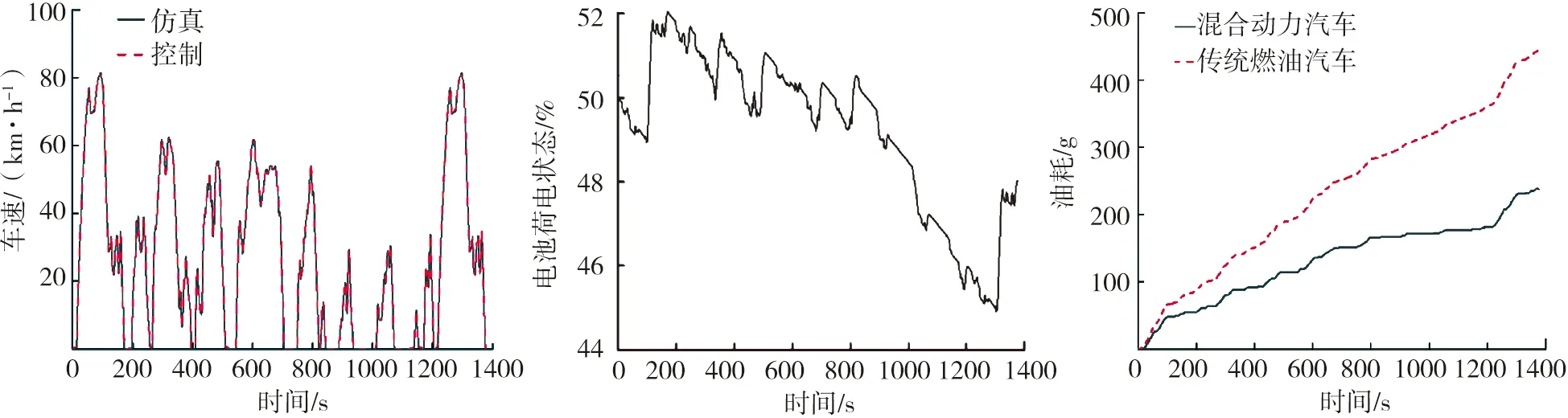
图7 JC08工况车速跟随曲线 图8 JC08工况电池SOC变化曲线 图9 JC08 工况油耗对比曲线
由图4、7可知:WLTC工况、JC08工况下的仿真车速与实际控制车速的匹配度几乎完全重合,搭建的仿真模型准确可靠,2种工况下的车速跟随情况良好,满足各个循环工况动力性的要求。

表3 各工况电池SOC变化 %
由图5、8可知:在整个循环工况中,电池SOC不是一直上升或下降的,是随着工况的变化而不断变化的。电池初始、最终SOC及仿真时电池SOC的变化幅度如表3所示。由表3可知:WLTC和JC08工况下电池SOC的变化幅度分别为-0.65%、-1.97%,电池SOC的变化幅度不大、基本保持平衡。各个工况下,混合动力汽车电池容量不会影响车辆的加速性能。

表4 各工况燃油消耗对比
由图6、9可知:WLTC和JC08工况下,混合动力汽车的燃油消耗比传统燃油车低,混合动力汽车更加省油。2个循环工况下的燃油消耗换算成100 km油耗如表4所示。由表4可知:WLTC工况下,混合动力汽车相对于燃油车节油约28.73%;JC08工况下,混合动力汽车相对于燃油车的节油约27.69%。
3.2 动力性仿真
车辆动力性是整车主要的性能之一,包括0~100 km/h加速性能、车辆爬坡性能等。本文中通过建立的模型对混动车辆纯电模式、纯燃油模型、混动模式下的动力性能进行仿真,不同模式下最大车速和最大爬坡度仿真结果如图10、11所示。
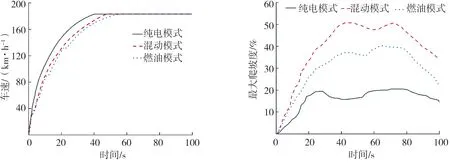
图10 不同模式下最大车速和加速性能 图11 不同模式下最大爬坡度
由图10可知:汽车的最大车速为183.25 km/h;纯电、混动和燃油模式下,车速由0加速到100 km/h的时间为分别为8.53、10.67、14.36 s。纯电模式下0~100 km/h加速时间符合国家863计划电动汽车重大专项——电动汽车招标书中规定的电动汽车加速性能指标要求(0~100 km/h的加速时间小于10 s)。由图11知,混动模式下最大爬坡度为51.32%,相对于燃油模式(最大爬坡度39.23%)提升了23.52%。混合动力模式下动力性能比传统的燃油车更好,符合整车设计的动力性要求。
4 结论
以某款插电混合动力汽车为研究对象,基于AMESim建立其仿真模型,并在WLTC和JCO8 2种工况下,对混动汽车的动力性和经济性进行仿真。
1)仿真车速与实际控制车速的匹配度几乎完全重合,仿真模型准确可靠,仿真模型能够用于评估该混动车型的可行性。
2)不同循环工况下,车速跟随和电池SOC变化情况均符合要求,且混合动力汽车比传统燃油车更加省油。
猜你喜欢
汽车工程学报(2022年5期)2022-10-12
时代汽车(2022年17期)2022-09-06
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
煤气与热力(2022年4期)2022-05-23
飞控与探测(2022年1期)2022-04-02
舰船科学技术(2021年12期)2021-03-29
北京汽车(2021年1期)2021-03-04
汽车杂志(2018年6期)2018-06-25
电机与控制学报(2018年9期)2018-05-14