输入饱和下非线性系统的事件触发控制器设计
2022-05-21 02:30楼旭阳崔宝同
控制理论与应用 2022年4期
蔡 旭,楼旭阳,崔宝同
(江南大学轻工过程先进控制教育部重点实验室,江苏无锡 214122)
1 引言
近年来,采样数据系统的研究为处理线性或者非线性系统提供了几种技术,采样数据控制成为控制一类具有通信能力受限特性系统的一种重要方法[1-2].周期采样系统的鲁棒稳定性得到了广泛的关注[2].传统的周期控制使用恒定的时间间隔,这可能造成资源的浪费.因此,事件触发方法被提出作为时间触发控制的替代方法,以此减少资源的浪费.事件触发的基本思想是:控制任务和传输在由一些设计的事件触发器生成的事件发生后执行,否则可以跳过控制任务并且取消传输.很多研究表明事件触发控制能够显著地减少控制任务执行和信号传输的次数,同时能够保持比较满意的闭环性能[3].
在事件触发控制框架中,有一个关键问题是如何设计一个特定的事件触发条件来减少控制任务的执行和数据传输.文献[4]提出了一种基于输出的线性离散时间系统的事件触发控制.文献[5]考虑了一类离散时间分段仿射系统的事件触发镇定问题.文献[6]研究了线性时不变离散时间系统的椭球集值反馈问题及其在事件触发控制系统的应用.文献[7]针对网络化非线性控制系统设计了基于自适应事件触发方案满足H∞性能的模糊滤波器.以上研究并未考虑输入饱和情形,并且所设计的控制策略不能处理测量噪声和无模动态下的鲁棒镇定问题.事件触发控制算法的主要思想是受控系统在连续时间内工作,而控制器在采样周期内提供离散时间输入.因此,事件触发算法的设计问题可以转换为研究混杂系统的稳定性问题[8-12].在文献[13]中,Seuret等在混杂系统框架下基于Lyapunov 函数法针对线性系统设计了一种事件触发控制策略.但是,基于混杂系统框架下对于非线性系统设计事件触发控制策略,目前少有研究结果.
在实际系统中,执行器饱和是一个不可忽视的问题,因为它可能导致系统性能下降甚至不稳定.文献[14]研究了在装置层存在设定值约束的情况下,具有未知操作模型的浮选工业过程的两时间尺度操作最优控制问题.Kiener等在文献[15]中讨论了基于事件控制的饱和系统,并从稳定性的角度探讨了输入饱和对事件触发控制的影响.在文献[16]中,Seuret等通过事件触发算法保证了输入饱和下线性系统的指数稳定性和线性二次型性能.在文献[17]中,Ma等考虑了一类具有输入饱和的离散时间分段仿射系统的事件触发镇定问题.针对非线性非严格反馈多智能体系统,文献[18]提出了自适应神经网络事件触发控制器来解决输入饱和、未知干扰以及传感器故障的问题.尽管在现有的事件触发控制结果中已经解决了控制器饱和问题,但是对于在混杂框架下具有控制器饱和的非线性系统的事件触发控制,结果未见报道.
本文在混杂系统框架下研究了输入饱和下非线性系统的镇定问题,针对非线性函数的两个不同假设条件,设计事件触发控制策略,以减少数据传输量.主要贡献在于以下4点:1)针对具有输入饱和的非线性系统的镇定问题,基于非线性函数的两个不同的假设条件(即Lipschitz条件和扇区条件),分别提出了输入饱和下事件触发策略;2)设计了在混杂系统框架下的事件触发条件,即闭环混杂系统的跃集,当系统状态进入跃集时,系统更新控制输入;3)基于Lyapunov理论,在混杂系统框架下证明了闭环系统的局部稳定性;4)针对测量噪声和外部干扰,所设计的事件触发控制器可以实现混杂系统的半全局鲁棒镇定.
2 问题描述
考虑一类输入饱和下非线性系统:
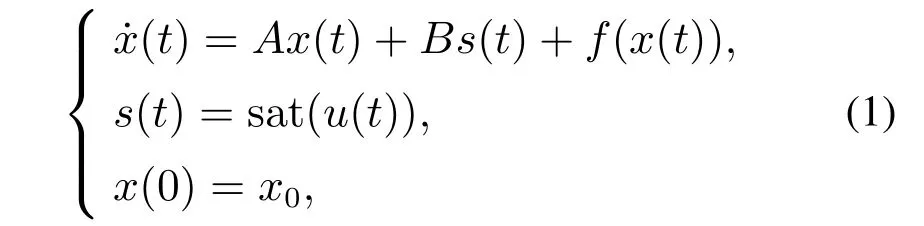
其中:x(t)∈Rn是系统状态,u(t)∈Rm是系统控制输入,A ∈Rn×n,B ∈Rn×m是常数矩阵.f:Rn →Rn是连续非线性函数,满足f(0)=0.
式(1)中的函数sat(·)是具有饱和范围的对称饱和函数:
针对上述非线性系统,给出下述两个假设.
假设1(Lipschtiz条件) 对于系统(1),函数f满足Lipschitz连续条件,即对任意x,y ∈Rn,满足

其中L>0为Lipschitz常数矩阵.
假设2(扇区条件) 对于系统(1),存在常数φ≥0和对称正定矩阵Z,使得函数f满足如下不等式:

针对系统(1)的事件触发控制问题,先设计状态反馈律

其中:K ∈Rm×n是待设计的控制增益矩阵.tj是事件发生器的触发时间.该控制器确保闭环系统(1)-(3)原点的局部渐近稳定性.
本文提出的事件触发控制方案如图1所示,事件触发策略将在下一节中讨论.
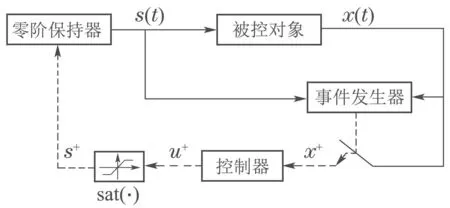
图1 事件触发控制示意图Fig.1 Event-triggered control scheme
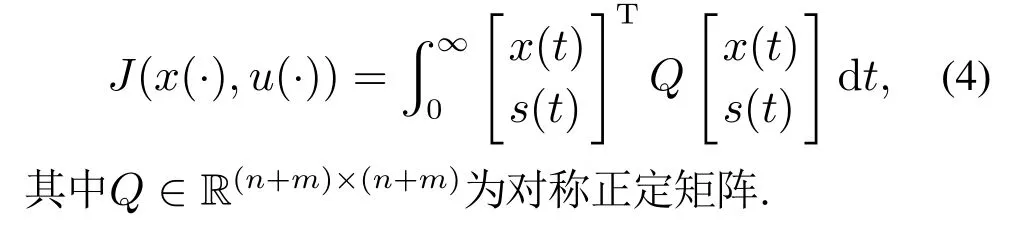
本文考虑系统状态吸引域包含球

其中α ∈R是一个设计参数.此外,还需要令系统(1)在控制器(3)作用下的解满足如下的性能指标:
为了减小通信频率和节省通道资源,控制信号s采用事件触发机制更新,采样和保持装置可用于获得反馈律(3)的采样数据.当控制器s=sat(u)随着u=Kx的更新规则s+=sat(u),可以设计事件触发采样律.所提出的事件触发方案采用文献[9,11,19]中的混杂系统框架.在这种情况下,数据采样系统可以写成如下混杂系统形式:
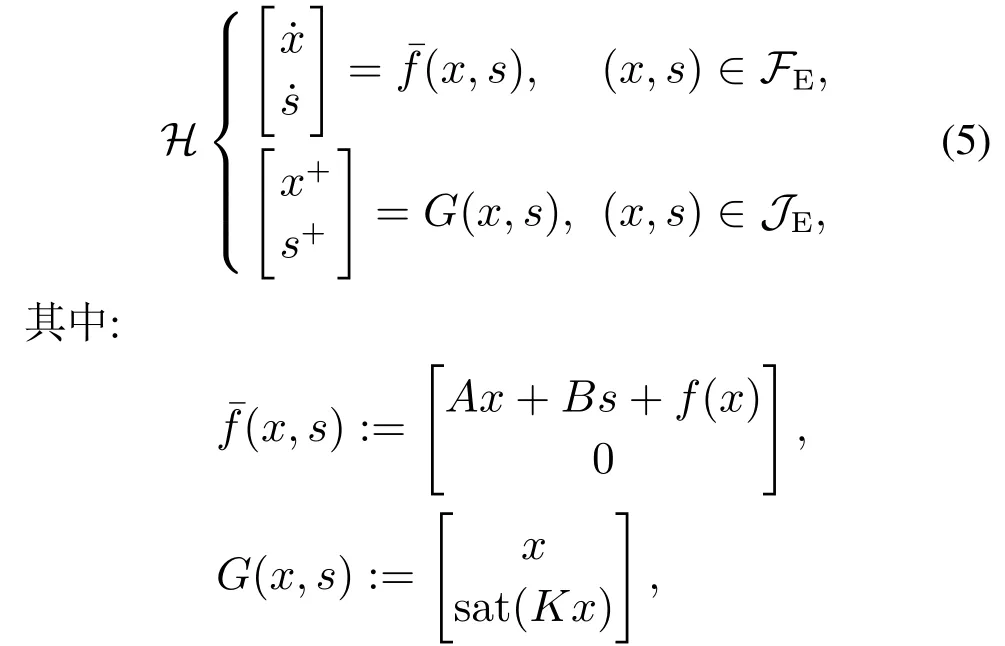
(·)+表示(·)离散时刻的状态,s ∈Rm表示在流态中保持恒定的控制输入,并在跃态时更新.FE,JE分别是Rn×Rm的两个子集,分别表示解允许在哪里流动和跳转.FE,JE分别称为流集和跃集,是根据事件触发条件在控制设计中可用的自由度.对于每个初始条件(x(0,0),s(0,0))∈FE∪JE,本文利用每个极大解(x(t,j),s(t,j))的域∪j∈N([tj,tj+1]×{j})拟合文献[9,11,19]中提出的框架,关于混杂系统解详见文献[9].混杂模型可以有效的表示系统的采样数据性质,其中一个跳转对应一个控制输入的更新.
注1事件生成器的触发时间tj表示控制输入更新的时刻.混杂系统(5)给出了事件触发采样律下系统(1)的一般混杂系统框架.然后,事件触发条件将通过流集FE和JE的形式来设计.也就是说,事件触发时刻可以通过跃集JE的形式写成

本文将解决如下问题:
问题1对于系统(1),给定标量α>0,如何确定控制增益K以及状态反馈律的事件触发采样机制(即设计FE,JE),以保证闭环系统(5)在吸引域下(包含原点)是局部一致渐近稳定的.
3 主要结论
本节将通过设计事件触发条件下的状态反馈控制,建立混杂系统框架下具有输入饱和的非线性系统局部一致渐近稳定性条件.为了给出本节主要结果,给出以下的定义及引理.
定义1给定矩阵H ∈Rm×n和τ ∈Rm,定义hi和τi分别为矩阵H和τ的第i行,对称多面体定义为

定义2给定一个对称正定矩阵P和一个正标量ρ,E(P,ρ)表示下面的椭圆体

针对上述的闭环混杂系统(5),给出下述定理1,表明当非线性项满足Lipschitz条件时,对于混杂系统(5)存在一紧集A是局部一致渐近稳定的.

注2对于混杂系统(5),紧集A是本文要研究其稳定性的集合.由于混杂系统(5)具有x和s两个状态,并且s与控制输入相关,因此只需考虑x的收敛性.有关混杂系统理论更多定义和结果,请读者参考文献[9].
注3注意到代价函数(4)中矩阵Q在定理1中的线性矩阵不等式和事件触发条件中起着重要作用,可能影响闭环系统(5)的稳定性.因此,应选择合适的矩阵Q来平衡系统(1)的稳定性和控制性能.
接下来,若定理1成立,给出如下定理证明混杂系统(5)不存在Zeno现象.
定理2若定理1成立,则混杂系统(5)不存在Zeno现象.
证若定理1成立,则对定理1中式(12)的变量进行如下变换:

针对闭环混杂系统(5),给出下述定理3,表明当非线性项满足扇区条件时,对于混杂系统(5)存在一紧集A是局部一致渐近稳定的.

注6类似于定理2的分析,可以证明若定理3成立,混杂系统(5)不存在Zeno现象.
若取P=βIn,可以得出如下推论:

表示饱和函数的范围,则对于事件触发控制(3)作用下闭环系统(5),集合

是局部一致渐近稳定的,吸引域包含集合E(P,1)×U0,其中E(P,1)={x ∈Rn:xTPx≤1},并且混杂系统(5)不存在Zeno现象.
4 半全局鲁棒镇定
本节讨论前述事件触发控制器对于存在系统噪声和外部干扰具有鲁棒性.
5 仿真实例
为了说明所提出事件触发控制策略的有效性,下面通过单接点机械臂动力学系统和混沌系统为例进行仿真验证.
例1考虑文献[23]中单接点机械臂动力学系统:

其中:θ(t)为臂的角度,u(t)为控制输入.M是负载重量,J是转动惯量,g是重力加速度,l是臂长,R是摩擦系数.这些参数的值参考实际系统分别选取为
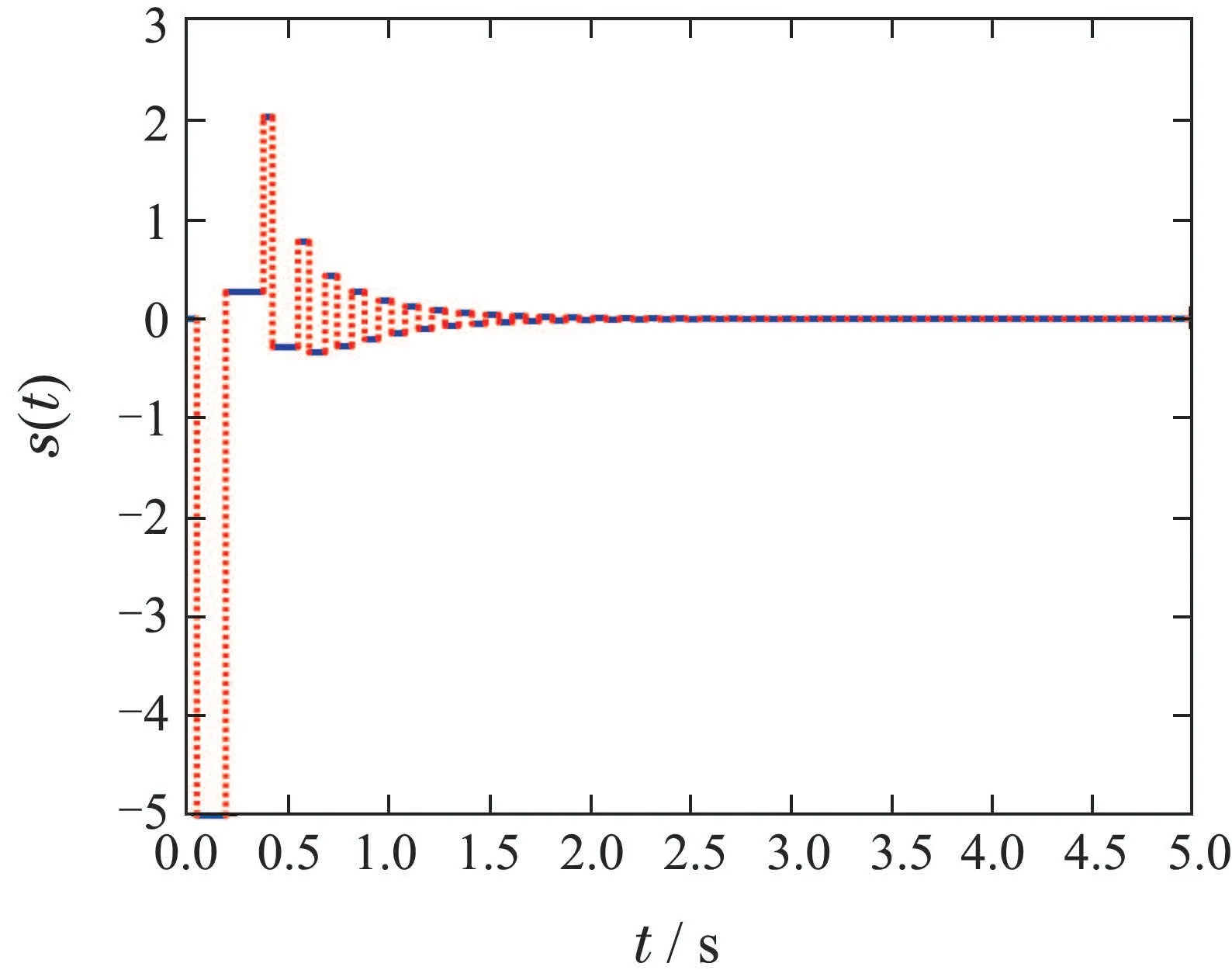
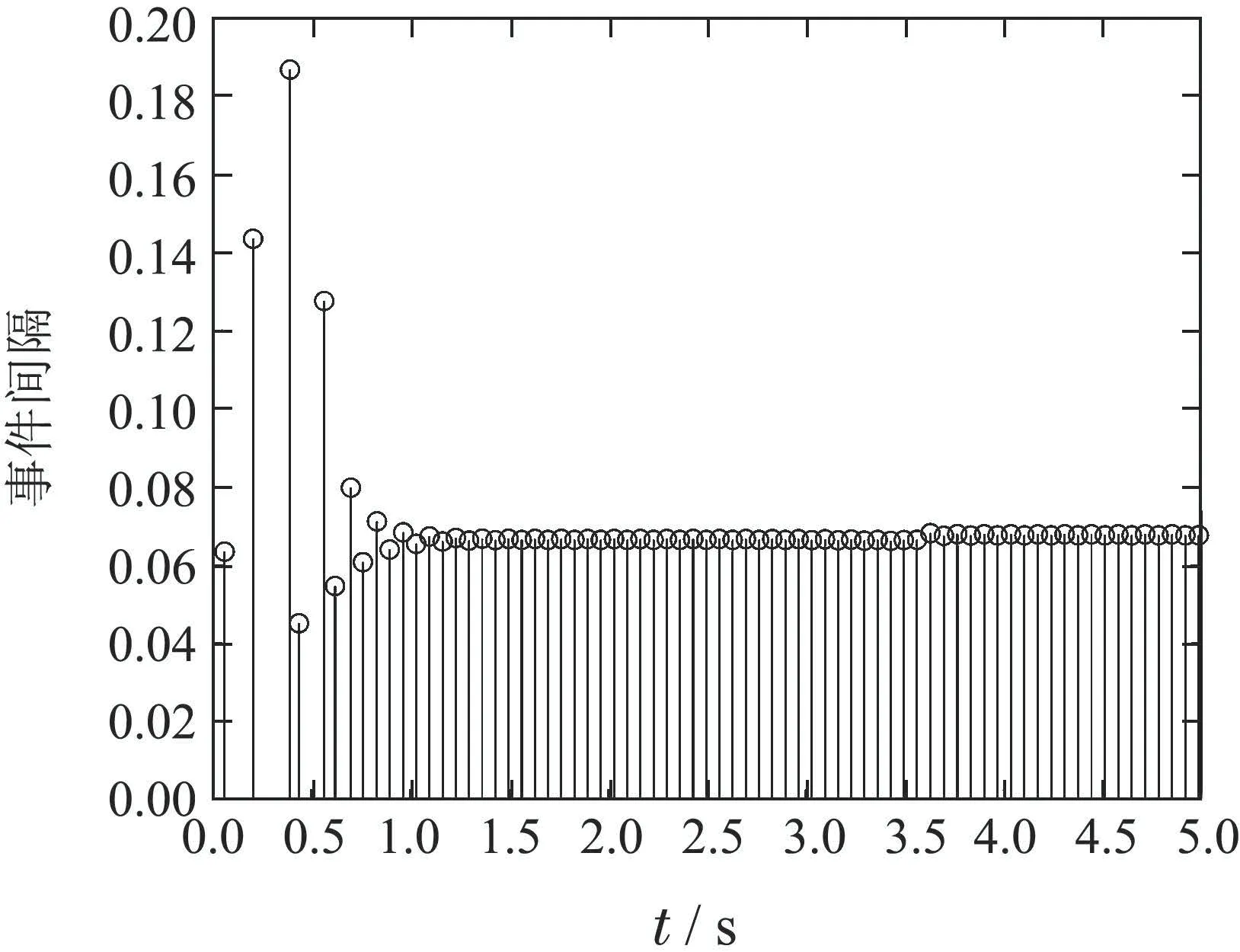
于是,利用所提出的事件触发控制机制,并结合上面的控制器增益K,可以得到闭环系统(5).考虑系统状态初始条件为,初始控制输入为0.通过仿真实验,图2-3显示了机械臂系统状态x和控制输入s的时间响应曲线,由图可以看出当非线性项f(x)满足假设1中的Lipschitz条件,系统状态在事件触发控制下迅速收敛到平衡点.事件间隔如图4所示,可以看出控制输入数据传输量大大减少.如图5所示,当初始状态处于吸引域时,系统状态可以收敛至平衡点.仿真结果表明了所提出的事件触发控制策略的优点和可行性.
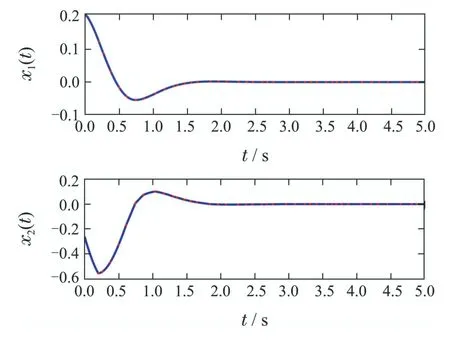
图2 系统状态的时间响应曲线Fig.2 Time response curve of state
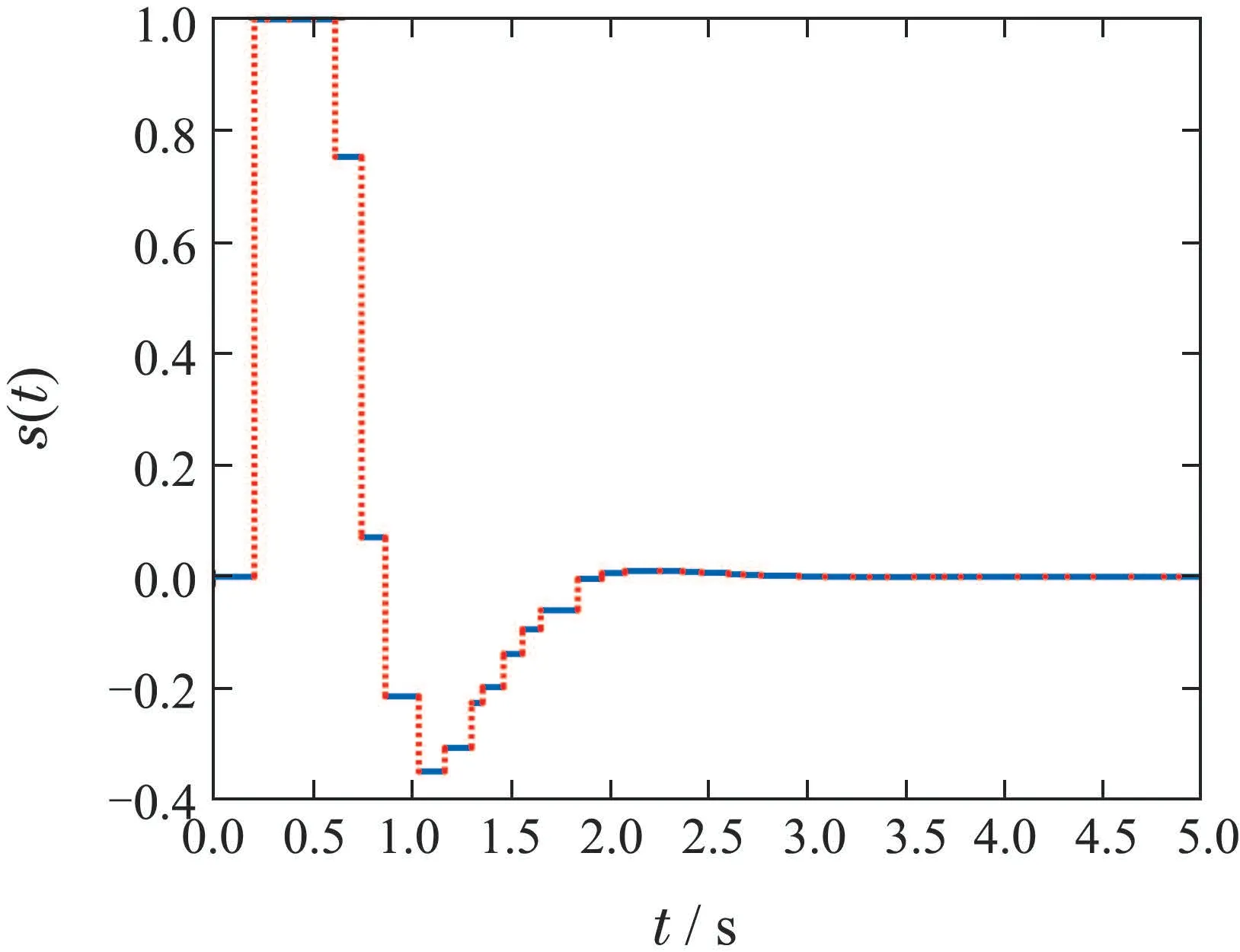
图3 饱和控制输入的时间响应曲线Fig.3 Time response curve of saturated control input
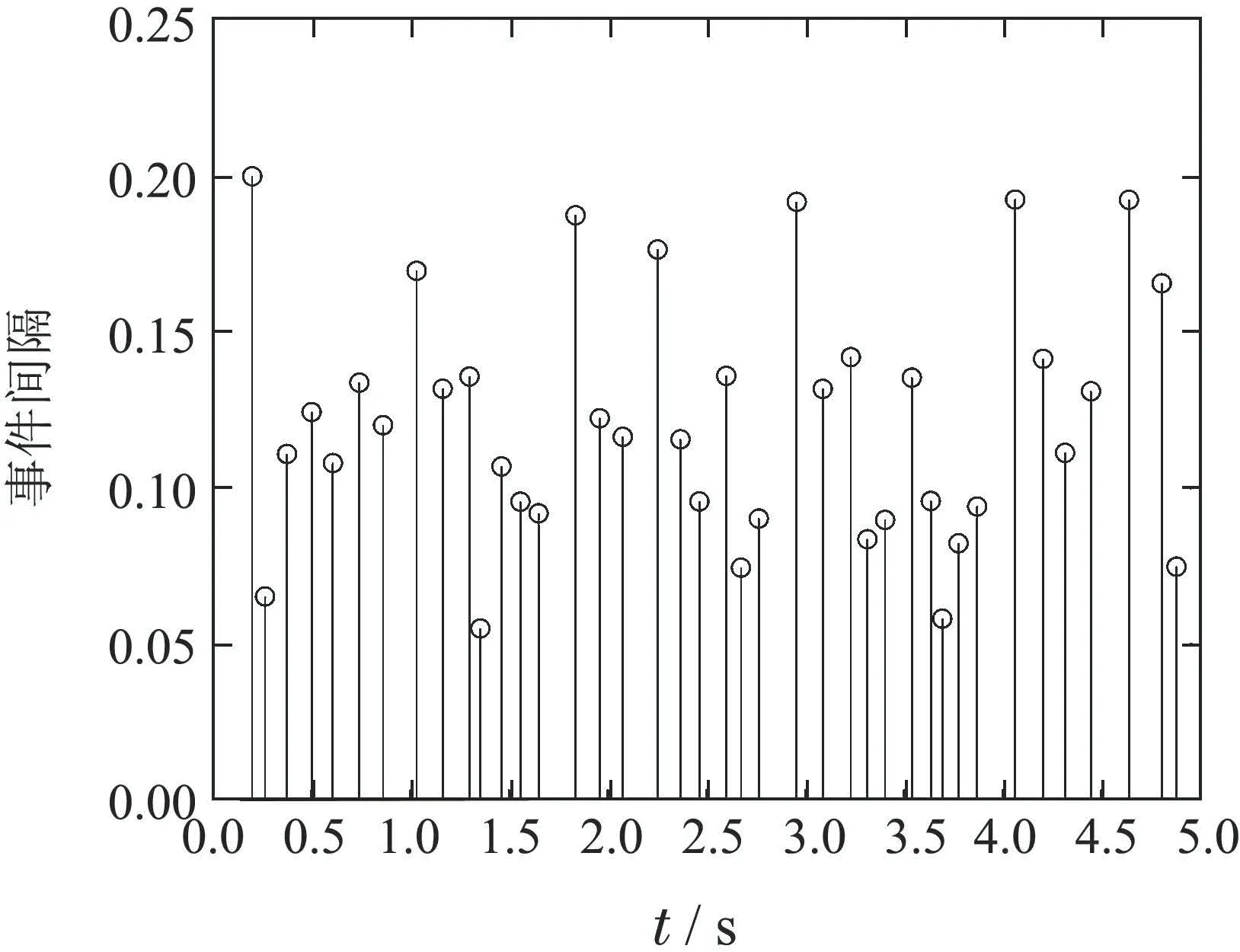
图4 事件间隔时间响应曲线Fig.4 Time response curve of event intervals
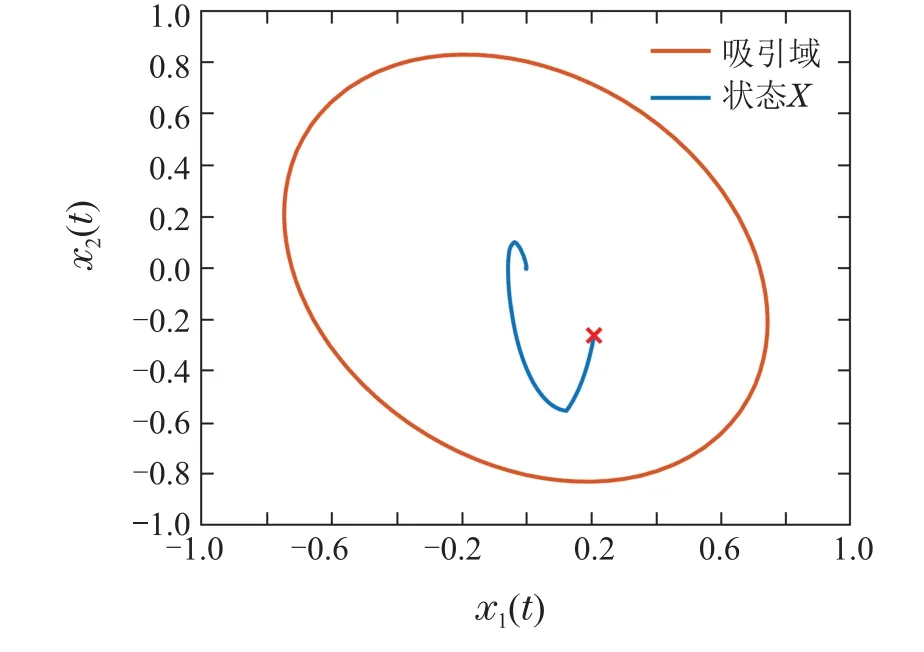
图5 吸引域范围曲线Fig.5 Range curve of attraction domain
为了比较控制器性能,将定理1中的结果与非饱和控制器作用下结果进行比较.由于非饱和控制没有对控制输入的幅值施加限制,比饱和控制器作用下系统状态的收敛效果应该更好.为了验证这一结果,仿真中两种控制器,采用相同的控制增益.通过仿真实验,图6-7显示了机械臂系统状态x和控制输入s的时间响应曲线.由图可知,与非饱和控制器相比,饱和控制器下系统状态收敛速度稍慢,而且有着更大的超调,但好处是实际中可以根据需要满足输入限幅要求.
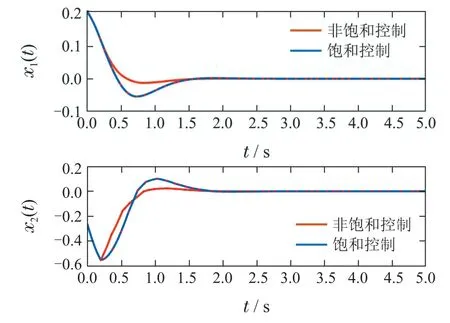
图6 系统状态的时间响应曲线Fig.6 Time response curve of state
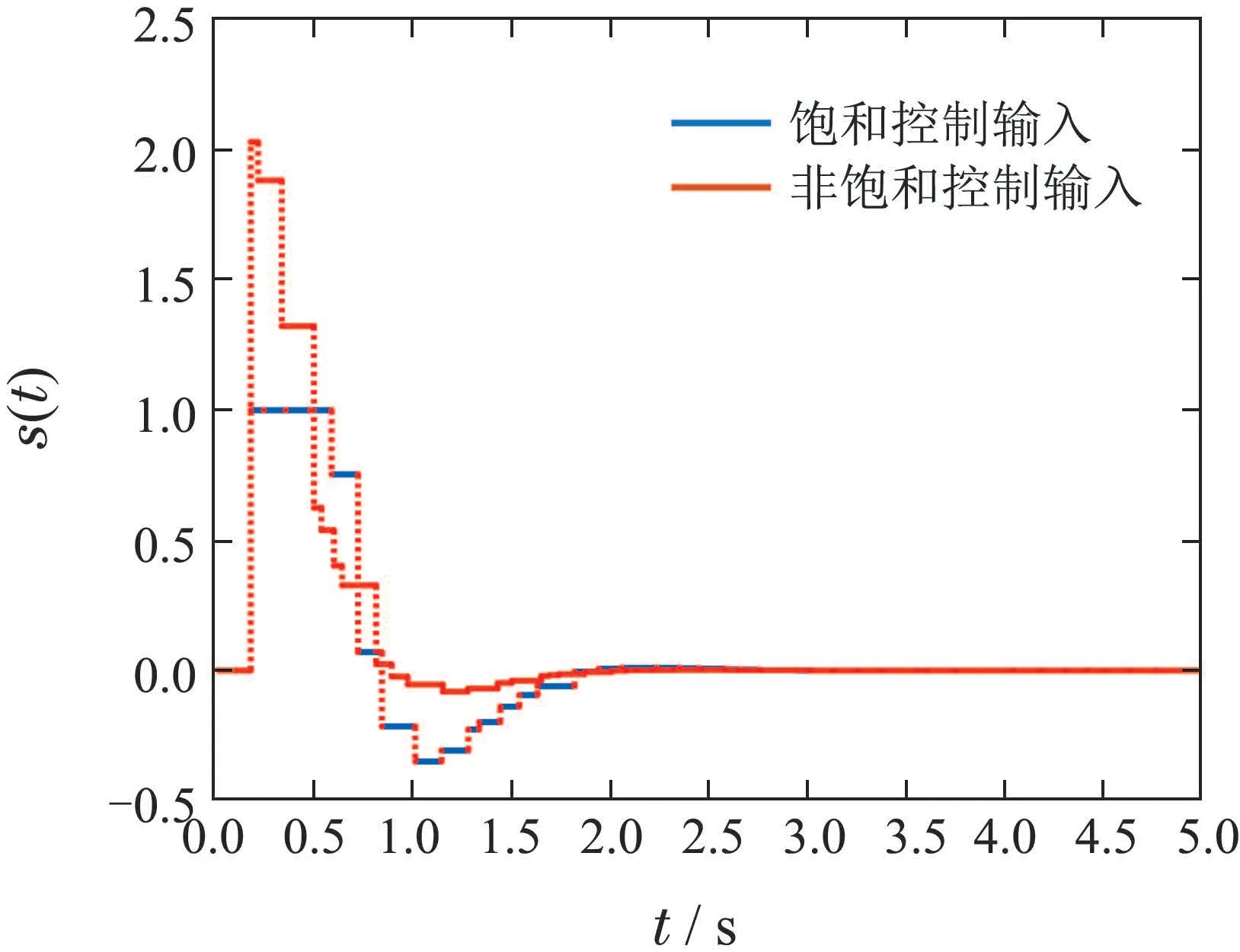
图7 控制输入的时间响应曲线Fig.7 Time response curve of control input
为了验证该方法的优越性,我们把定理1中的结果和文献[24]中的饱和控制进行比较.文献[24]中饱和控制输入

其中Ei ∈E和.E是一组对角元素为0或1的对角矩阵,包含2m个元素.通过求解文献[24]中定理条件得到以下控制参数:
图8显示了机械臂系统状态的时间响应曲线.从图8可知,当系统状态控制收敛效果差不多情况下,由于本文用的是事件触发控制,而文献[24]用的是连续时间控制,所以基于本文定理1的事件触发控制比文献[24]状态反馈控制控制信号数据传输频率更少,从而更能减轻通信系统的负担.
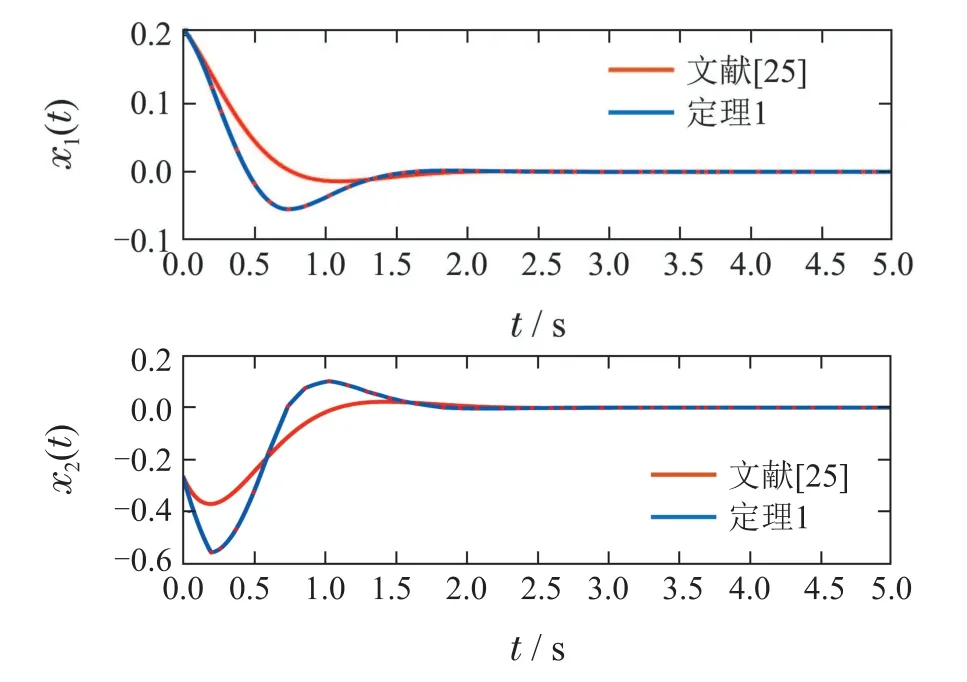
图8 系统状态的时间响应曲线Fig.8 Time response curve of state
例2考虑文献[25]中所描述的L¨u混沌系统:
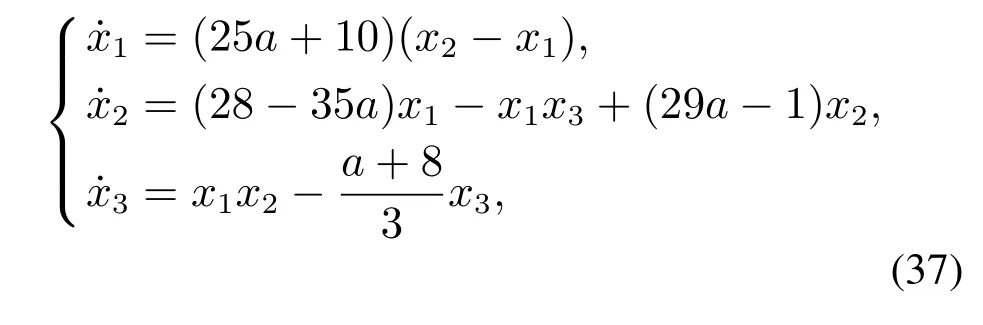
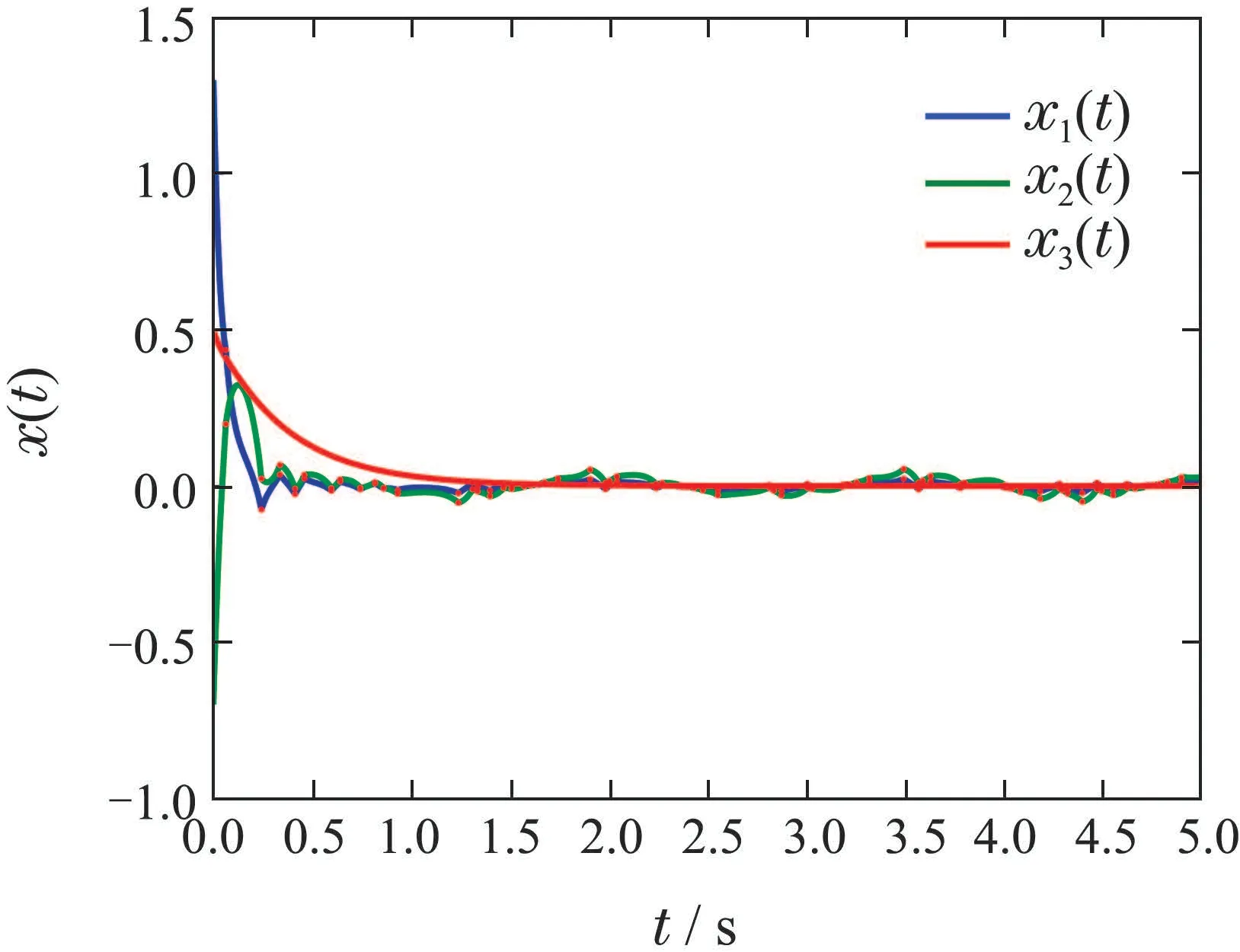
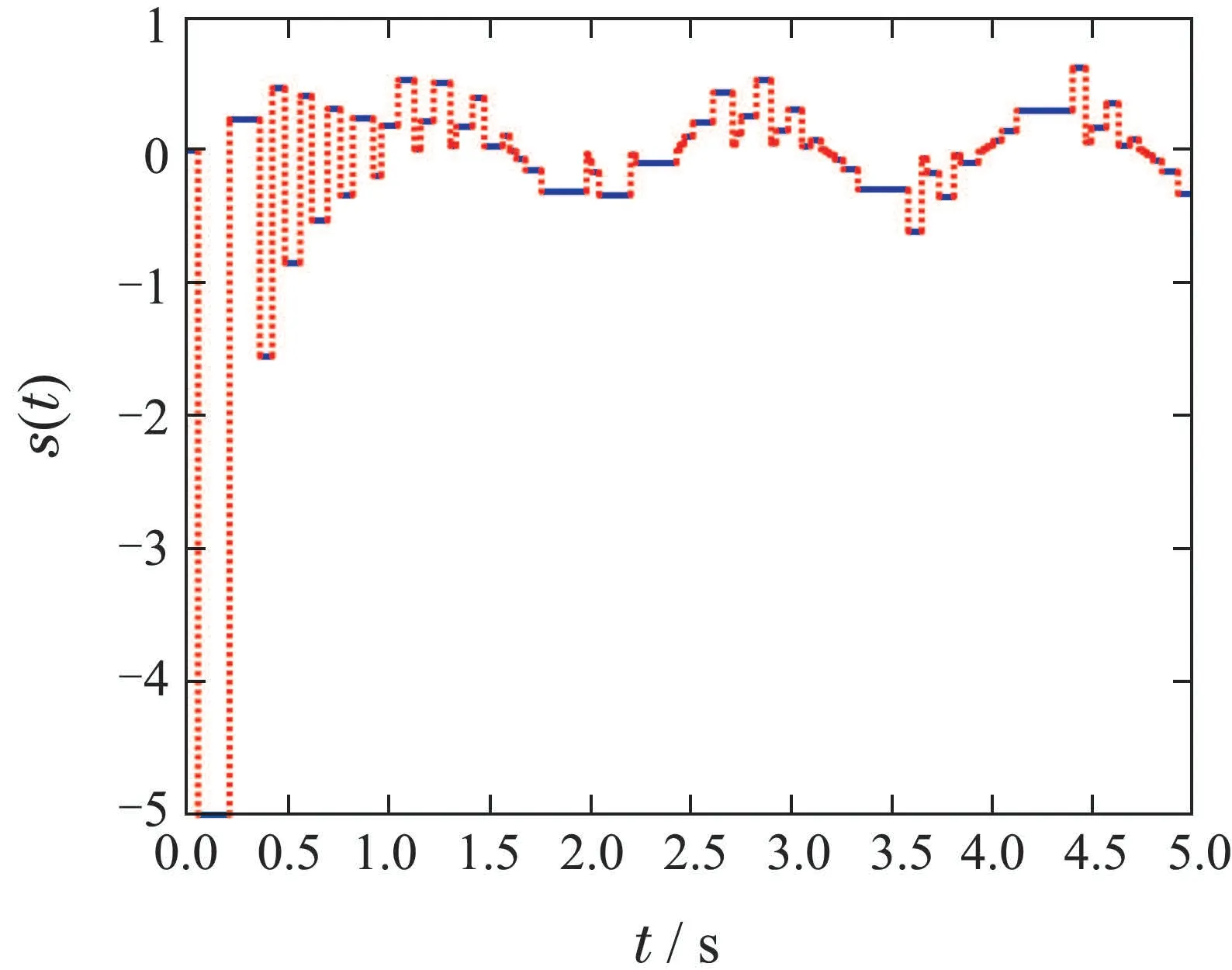
其中a ∈[0,1].在文献[25]中观察到:当0 ≤a<0.8时,系统(37)属于广义的Lorenz系统;当a=0.8时,系统(37)属于文献[26]中的一类混沌系统;当0.8 针对式(37)的混杂控制下闭环系统具有以下的形式: 对于系统(38),如果P=dIn时,那么fT(x)Px=dfT(x)x=0,满足假设2的条件.也就是说,可以令φ(t)=0. 仿真实验中,代价函数(4)中的矩阵 于是,利用所提出的事件触发控制机制,并结合上面的控制器增益K,可以得到闭环系统(38).考虑系统状态初始条件为[1.3-0.7 0.5]T,初始控制输入为0.通过仿真实验,图9-10显示了L¨u混沌系统状态x和控制输入s的时间响应曲线,由图可以看出当非线性项f(x)满足假设2中的扇区条件,系统状态在事件触发控制下迅速收敛到平衡点.事件间隔如图11所示,由图可知控制信号数据传输量较少.仿真结果表明了所提出事件触发控制策略的可行性. 图9 系统状态的时间响应曲线Fig.9 Time response curve of state 图10 饱和控制输入的时间响应曲线Fig.10 Time response curve of saturated control input 图11 事件间隔时间响应曲线Fig.11 Time response curve of event-triggered interval 为了验证定理4中所提出半全局鲁棒性,不考虑状态噪声但假设系统受到外部扰动 控制参数如式(39)所示.考虑系统状态初始条件为[1.3-0.7 0.5]T,初始控制输入为0.通过仿真实验,图12-13显示了L¨u混沌系统状态x和控制输入s的时间响应曲线,由图可以看出当非线性项f(x)满足假设2中的扇区条件,当系统受到外部干扰时也能在控制器作用下迅速收敛到有界域,从而验证了定理4结论. 图12 外部扰动下系统状态的时间响应曲线Fig.12 Time response curve of state under external disturbance 图13 外部扰动下饱和控制输入的时间响应曲线Fig.13 Time response curve of saturated control input under external disturbance 针对一类非线性系统,提出了基于非线性函数的两个不同假设条件.当非线性函数满足Lipschitz条件或扇区条件时,讨论了输入饱和下非线性系统在混杂系统框架下的局部稳定性问题,提出了基于Lyapunov稳定性理论的非线性系统稳定判据,并由此设计了事件触发饱和控制器.最后,给出两个仿真例子说明了所设计事件触发控制器的有效性.

6 结论
猜你喜欢
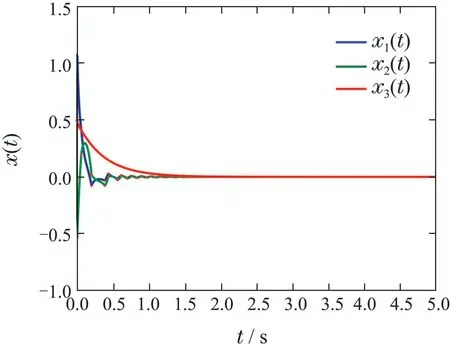
中等数学(2022年6期)2022-08-29
煤气与热力(2021年12期)2022-01-19
中学生数理化(高中版.高考数学)(2021年11期)2021-12-21
中国交通信息化(2020年4期)2021-01-14
中华养生保健(2020年3期)2020-11-16
电子制作(2019年13期)2020-01-14
中国惯性技术学报(2019年3期)2019-10-15
校园英语·上旬(2019年6期)2019-10-09
北京航空航天大学学报(2016年7期)2016-11-16
筑路机械与施工机械化(2014年4期)2014-03-01