基于双通道事件触发机制的水面无人艇同时故障检测与控制
2022-05-21 02:30王旭东费中阳
控制理论与应用 2022年4期
王旭东 费中阳 杨 柳
(1.哈尔滨工业大学航天学院,黑龙江哈尔滨 150001;2.湖南大学机器人学院,湖南长沙 410082;3.大连理工大学工业装备智能控制与优化教育部重点实验室,辽宁大连 116024;4.大连理工大学控制科学与工程学院,辽宁大连 116024)
1 引言
随着GPS定位、导航、自动化、卫星通信等技术的进步,水面无人艇(unmanned surface vehicle,USV)在过去数十年得到了长足的发展[1-3].由于USV具有重量轻、体积小、隐蔽性好、机动性强、价格低等优点,USV 在包括环境监测、水文调研、海洋资源勘探、污染物追踪、海岸监控、紧急救援等诸多领域扮演着越来越重要的角色[4-6].因此,USV的控制问题得到了学者的广泛关注.文献[7]研究了基于网络的USV建模和动态输出反馈控制.文献[8]研究了基于增量预测控制的网络环境下USV编队系统的输出一致性问题.
由于海浪侵蚀、超低温工作环境、超长工作时间,USV系统在实际工作时不可避免地可能发生执行器故障.因此,为了提升USV系统的鲁棒性、安全性,研究USV系统的故障诊断和容错控制至关重要.作为故障诊断中的一项关键技术,故障检测获得了研究者的大量关注[9-12].文献[9]研究了Takagi-Sugeno模糊Itˆo随机系统的鲁棒故障检测.文献[10]研究了非线性系统基于自适应迭代学习的故障检测问题.文献[12]研究了基于鲁棒滑模观测器的故障检测.
然而,在上述文献中,故障检测器和控制器是分别进行设计的,导致较高的全局复杂度.因此设计同时故障检测和控制(simultaneous fault detection and control,SFDC)模块同时实现系统故障检测和控制具有重要意义.针对SFDC问题的研究在过去数十年取得了一些成果.文献[13]针对SFDC问题提出了H2/H∞描述,其中H2指标和H∞指标分别用来度量故障检测目标和控制目标.文献[14]研究了离散时间时滞切换系统的SFDC问题.文献[15]研究了二维FM系统的SFDC问题.文献[16]进行了网络化控制系统的故障检测滤波器和控制器联合设计.
USV系统在实际中通常工作于网络环境中,远程的SFDC模块通常位于母舰/陆地,系统部件之间的信息交互通过共享的通讯网络进行.由于USV系统能源储备有限,大量的信号传输会造成能源的消耗,因此需要更高效、节能的采样机制实现USV系统的SFDC目标.事件触发机制由于其在减小网络带宽占用、计算成本、能量消耗方面的优异性能,成为了时间触发机制的有效替代方案并引起了学者的大量关注.文献[17]研究了基于事件触发的多智能体系统一致性控制.文献[18]研究了基于事件触发通信的故障诊断问题.文献[19]针对不确定离散时间随机系统,研究了其在事件触发条件下的SFDC问题.文献[20]研究了事件触发采样系统的集值反馈控制问题.
注意到前述工作所涉及的事件触发条件(eventtriggered condition,ETC)依赖于瞬时测量值.近期,文献[21]提出了一种基于积分的事件触发机制,其允许Lyapunov函数在两个连续的事件触发时刻间是非减的,和传统触发机制相比,该机制具有更小的保守性[22-23].
基于以上分析,本文针对带有执行器故障和外部扰动的USV系统进行其在积分型事件触发通信条件下的SFDC问题研究.本文的贡献主要包括:1)设计了一种新的积分型事件触发机制,触发间隔具有正值下界,避免了Zeno现象;2)构建了双通道积分型事件触发条件下USV系统的SFDC框架;3)提出了事件触发条件下故障检测器和控制器的同时设计方法,并给出了积分型事件触发参数的设计准则.
本文的结构如下:第2节建立了USV系统在双通道事件触发机制下的SFDC框架;第3节给出了故障检测器、控制器、事件触发机制的联合设计准则;第4节用仿真实验验证了所提方法的有效性;第5节为结论.
2 问题描述
USV的基于事件触发的SFDC结构如图1所示,USV和舰基/陆基的SFDC模块通过无线通信网络连接.两个事件触发器被引入以节约有限的通信和能源资源,系统输出、控制信号是否需要通过网络进行传输由触发器决定.
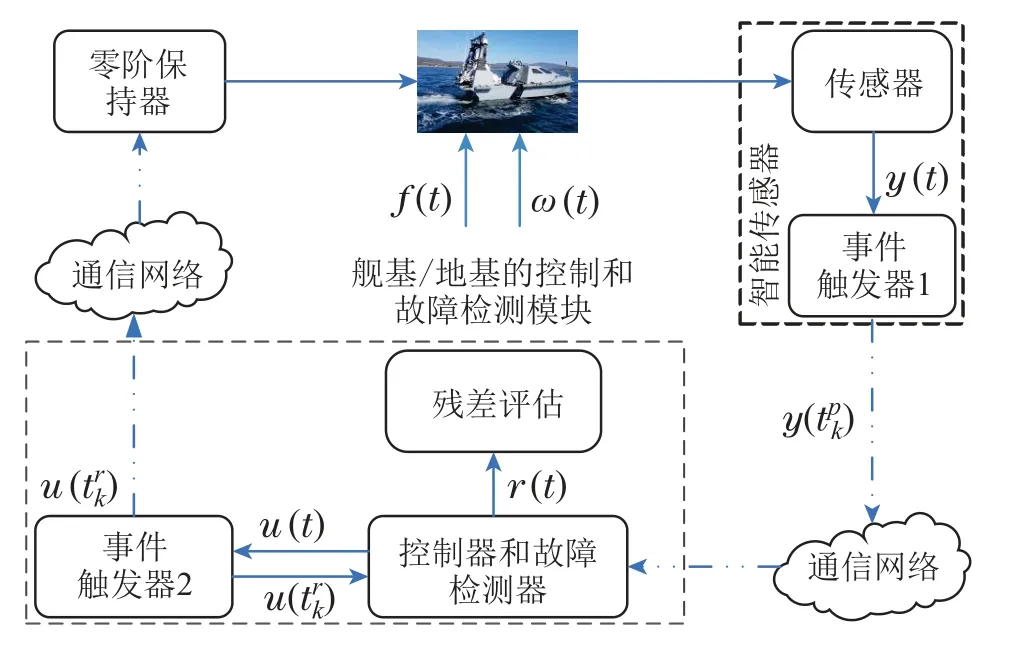
图1 USV的基于双通道事件触发的SFDC框架Fig.1 Dual-channel event-triggered SFDC for USV system
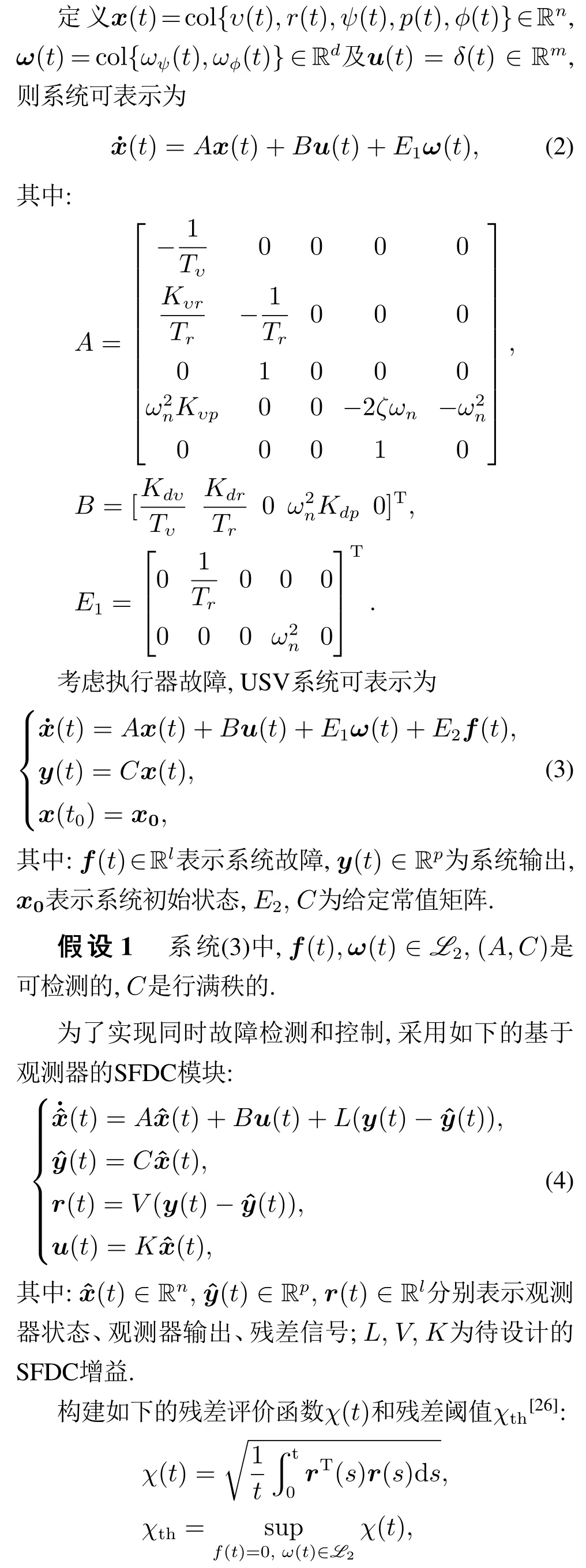
USV的运动包含6个自由度,分别为纵荡、横荡、垂荡、横摇、纵摇、艏摇.本文假设USV的前向速度为常值,且只考虑横荡-艏摇-横摇子系统上的运动.USV的运动学方程可表示为[16]
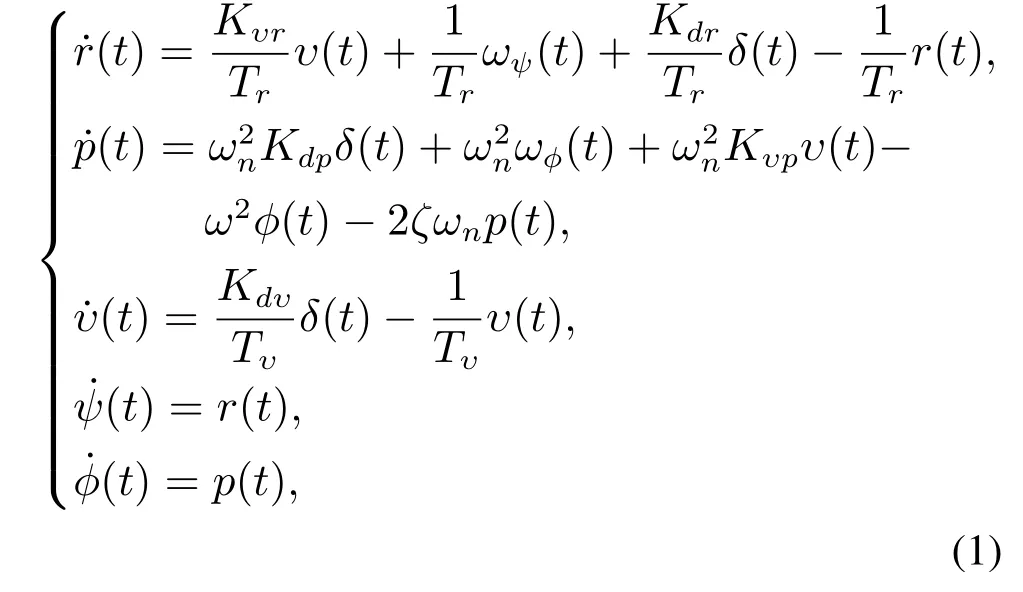
其中:r(t),p(t),υ(t)分别为艏摇角速度、横摇角速度和由舵角变化引起的横荡速度;ψ(t),φ(t),δ(t)分别表示航向角、横摇角、方向舵偏角;ωψ(t),ωφ(t)分别表示由海浪对航向角和横摇产生的扰动;Kdp,Kdr,Kυp,Kυr和Kdυ为已知增益;Tr和Tυ为给定时间常数;ωn和ζ分别表示无阻尼自然频率和阻尼系数.
该残差评价方法不直接根据残差信号的大小来判断系统是否发生故障,而是基于残差信号的平均能量来进行判断.相应的故障检测逻辑可表示为

当残差评价函数超出其相应阈值时,则认为系统发生故障;否则系统无故障.
如图1所示,为了节约通信资源,在传感器侧和控制站侧分别引入了事件触发器1和2,其触发时刻分别表示为和(k ∈N)且满足如下的积分型ETC:
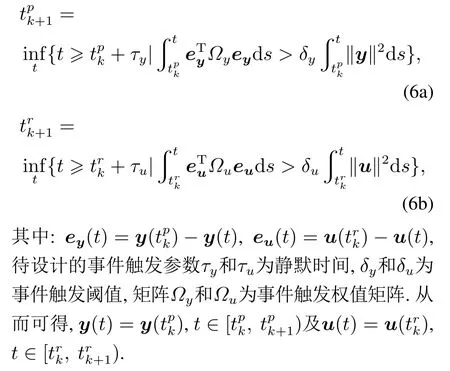
注1不同于文献[16],两个带有积分型ETC的事件触发器分别部署于传感器-控制器/滤波器通道和控制器/滤波器-执行器通道,只有当系统输出/控制信号满足给定的ETC,信号才通过共享的通讯网络进行传输.因此,和文献[16]相比,所采用的双通道事件触发机制能够更为有效地降低网络带宽占用和资源消耗.
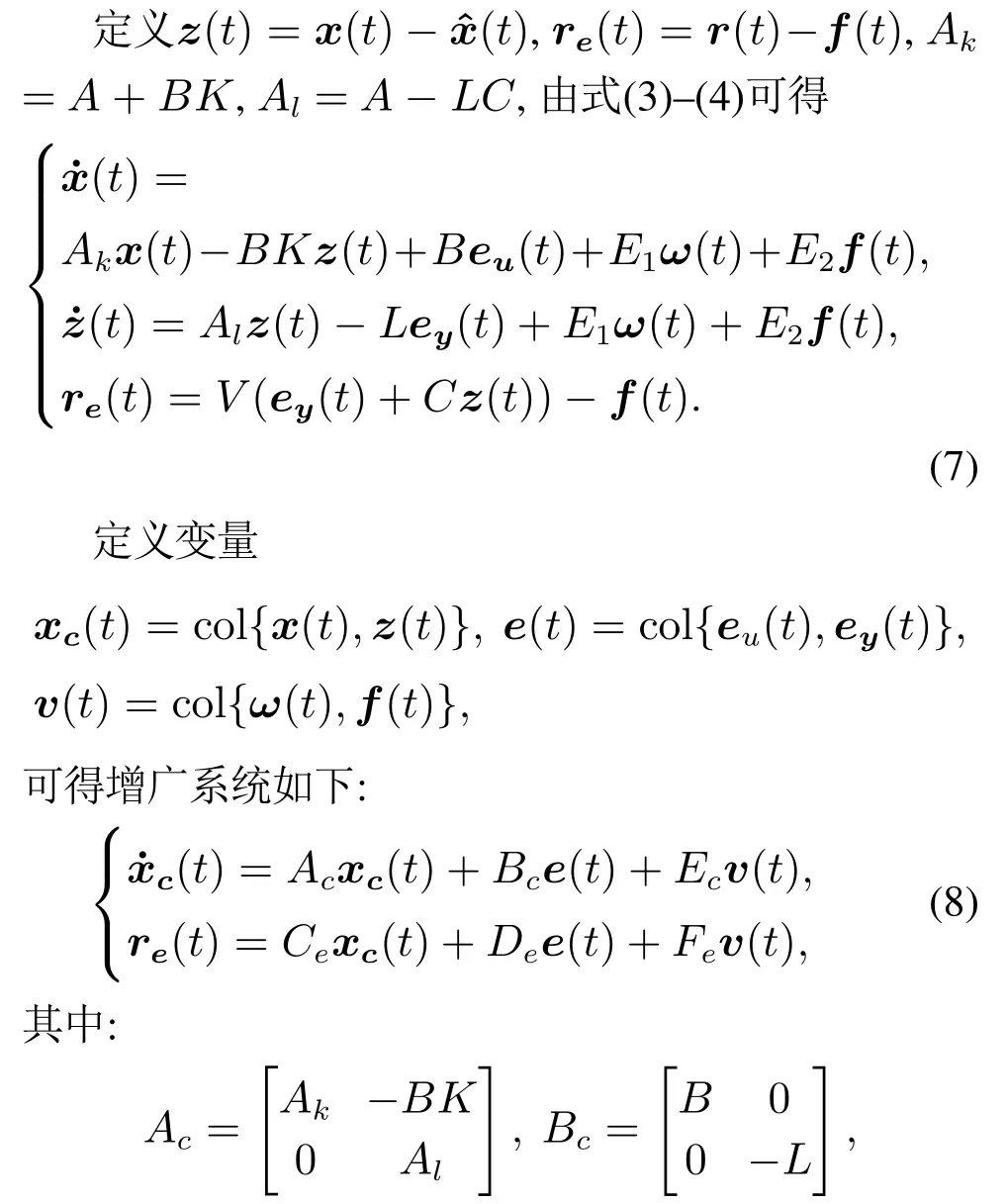
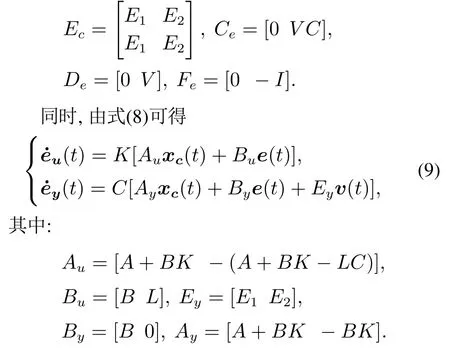
本文旨在解决基于双通道事件触发的USV的同时故障检测和控制问题,即使得:
1) 增广系统(8)是渐近稳定的;
2) 零初始条件下,增广系统(8)具有H∞性能指标γ,即对于任意v(t)∈L2满足

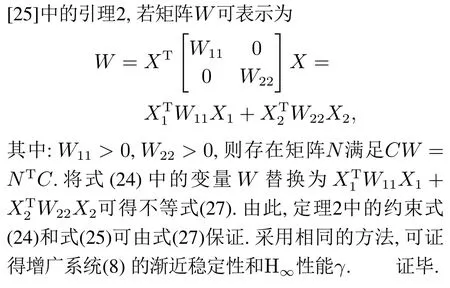
本文主要结果的证明中用到以下引理:
3 主要结果
本部分进行了积分型事件触发通讯机制下的故障检测器和控制器的联合设计,并根据设计的SFDC模块进行了事件触发参数的设计.
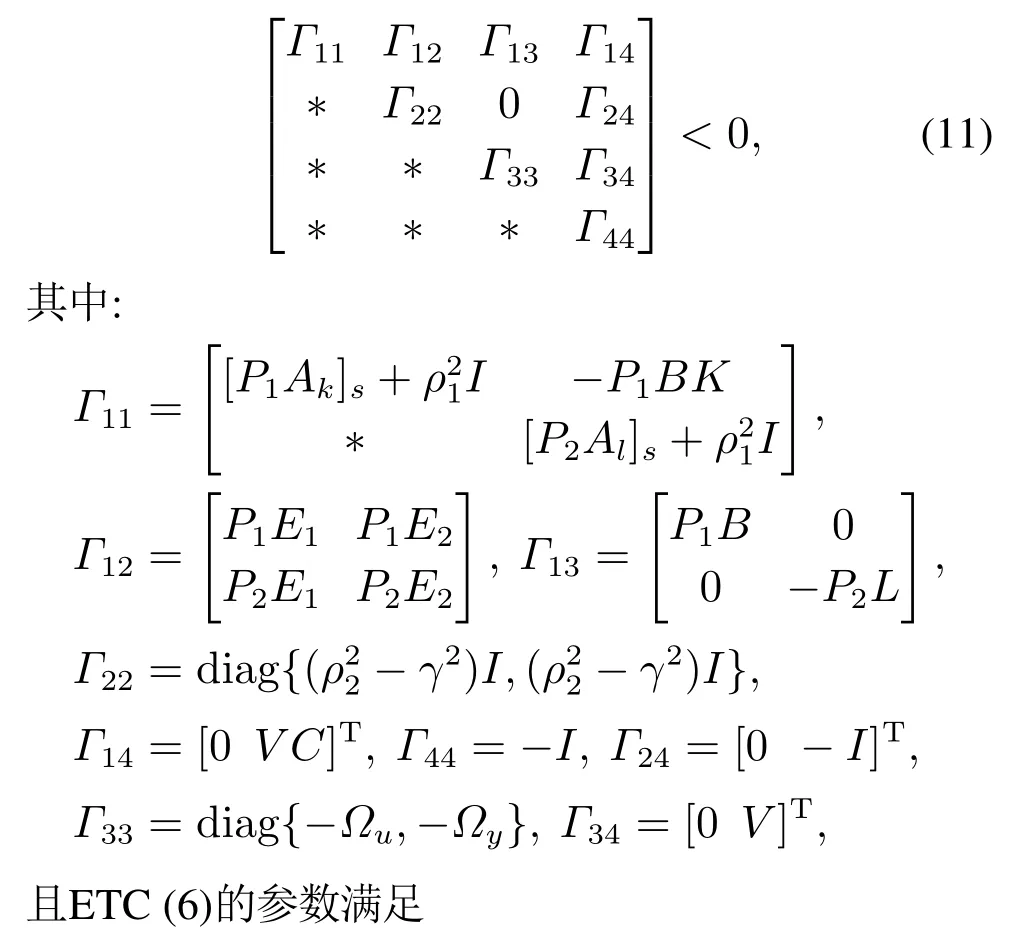
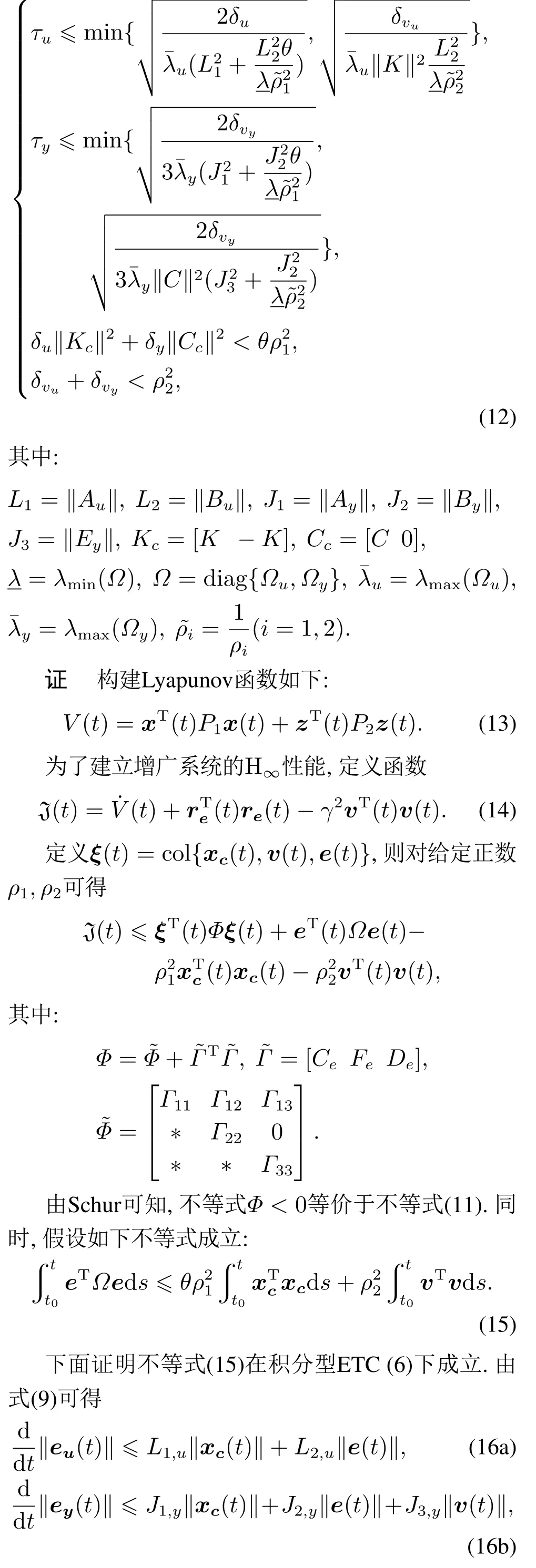
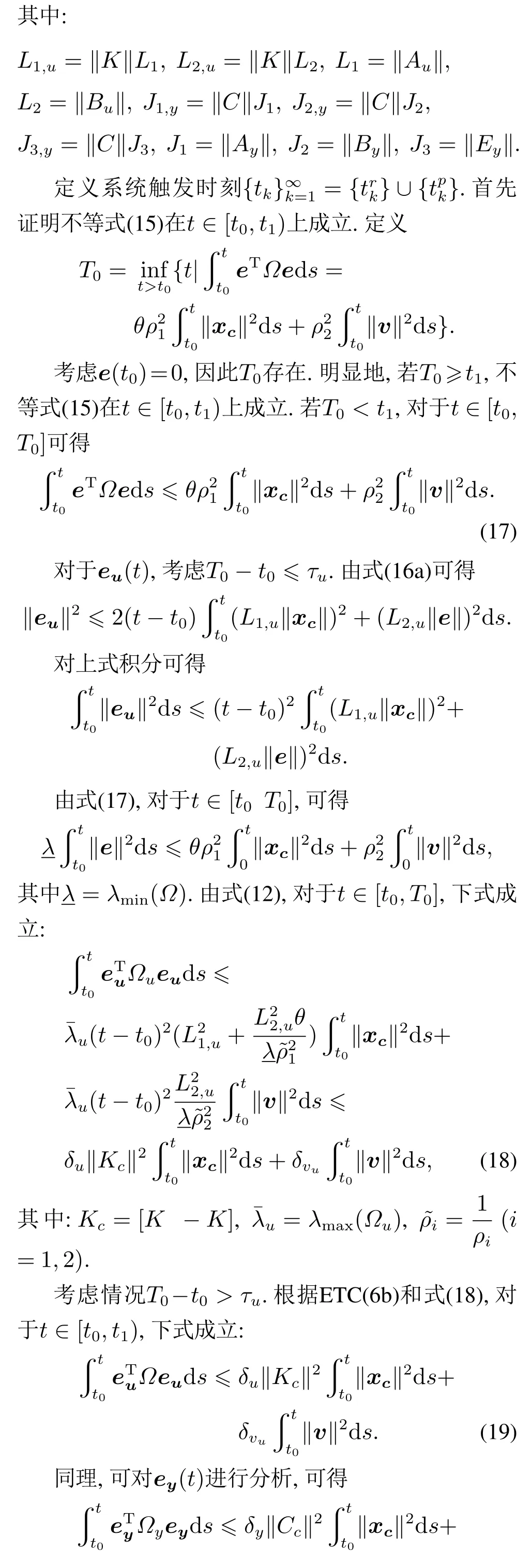
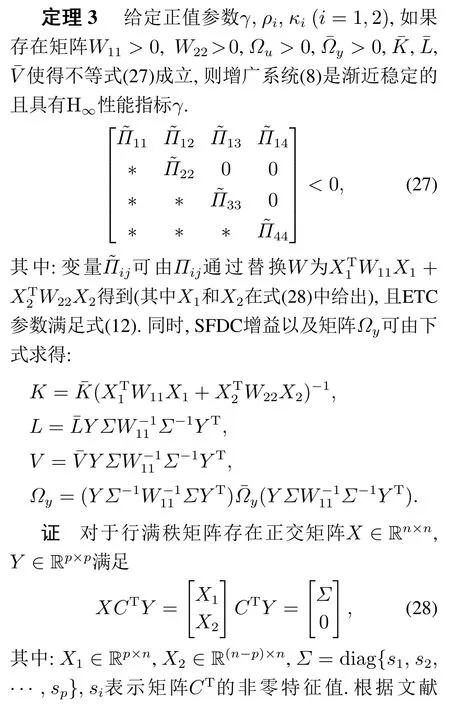
定理1给定正值参数ρ1,ρ2,γ,θ ∈(0,1),以及SFDC增益L,V,K,如果存在矩阵P1>0,P2>0,Ωu>0,Ωy >0使不等式(11)成立,则增广系统(8)是渐近稳定的且具有H∞性能指标γ.

从而,结合式(19)-(20)和事件触发参数(12),对于t∈[t0,t1),下式成立:
明显地,上式与T0的定义矛盾.因此,T0≥t1在ETC(6)下恒成立,即不等式(15)在t ∈[t0,t1)上可由式(12)保证.
接下来,对区间[tk,tk+1)进行分析.首先假设不等式(15)对t ∈[t0,tk)成立,定义Tk为
若事件触发器1和2在tk时同时触发,明显地
若事件触发器1或2在tk时没有触发,例如触发器2没有触发,可得

从而,在t ∈[tk,tk+1)上下式成立:

这与Tk的定义矛盾.因此Tk≥tk在事件触发机制下总是成立的,即不等式(15)在式(12)给定的事件触发参数下对于区间t ∈[t0,tk+1)成立.
基于上述分析,可得
当t →∞,在零初始条件下,不等式(10)成立.当v≡0,可得
即增广系统是稳定的.同时,函数
的极限存在且以-V(t0)为下界.由引理1可知,‖xc‖2收敛到零.因此增广系统(8)是渐近稳定的且具有H∞性能γ. 证毕.
注2在定理1中,SFDC增益和未知矩阵变量耦合,不能用已有的工具箱进行求解.因此,提出以下定理求取故障检测器增益和控制器增益.
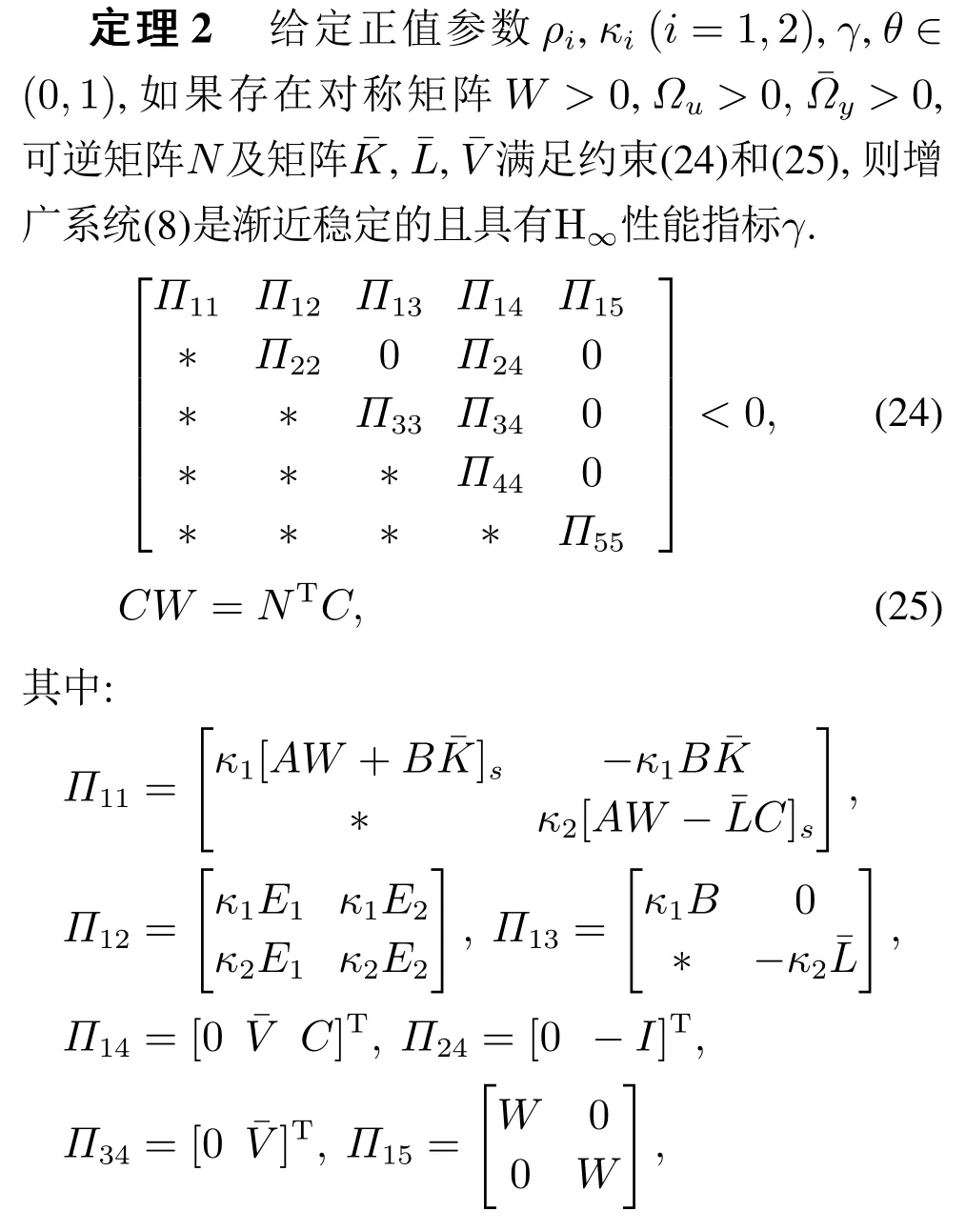
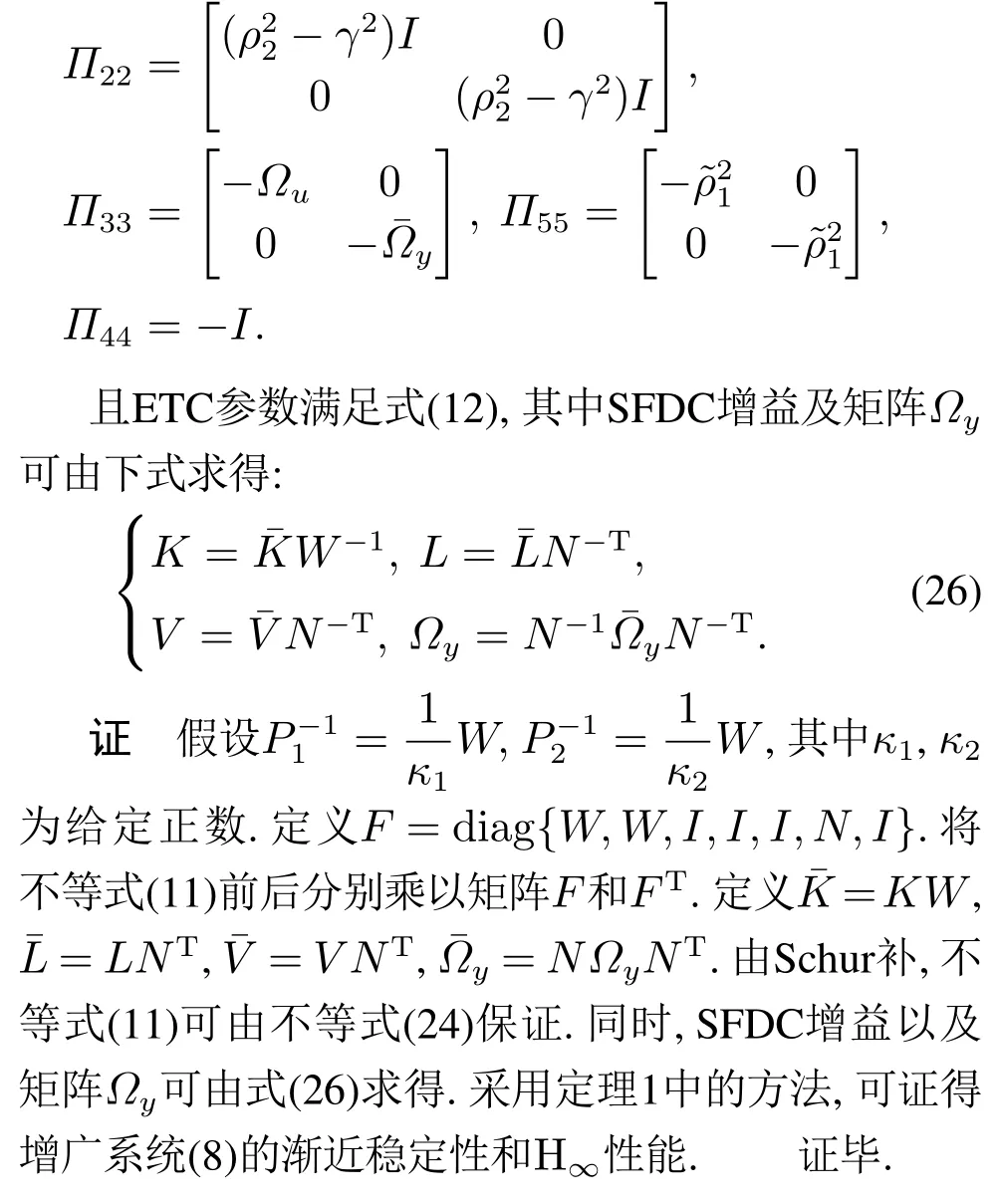
注3定理2给出了SFDC和ETC的设计准则,但是定理2中的等式约束(25)不能用已有的工具箱进行有效求解.为了解决这一问题,提出下面的定理消除等式约束.
注4定理3给出了SFDC增益和事件触发权值矩阵的设计准则.通过求解凸优化问题(27)容易得到最优H∞性能指标γ.然而,这就可能导致事件触发条件(6)中的静默时间、触发阈值变小,使得触发条件更易被触发,网络通信负载大大增加.因此,在实际中通常需要在故障检测性能和网络通信负载之间寻找折中点.在满足故障检测性能的前提下,尽量有效降低通信网络的带宽占用.
注5本文所提出的SFDC设计方法可离线获取控制器和故障检测滤波器增益.式(6)中积分型事件触发机制实际中可由累加器得以实现,从而大大降低了计算负载.
4 仿真示例
为了阐明所提出的事件触发的SFDC方法的有效性,考虑实际USV系统的参数如下所示[16]:
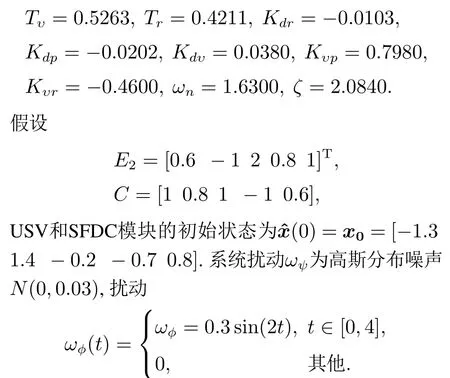
设系数κ1=1.8,κ2=1,ρ1=0.35,ρ2=3.16,θ=0.96.在平衡故障检测性能和网络通信负载后,选取H∞性能指标γ=13.6,由定理3可得SFDC增益
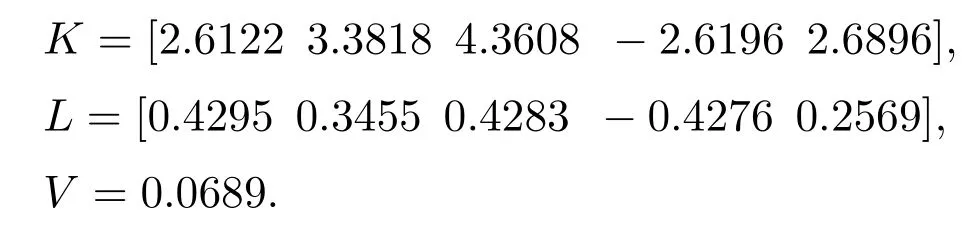
基于约束(12),ETC参数设计如下:

USV系统状态响应如图2所示,在双通道事件触发的通信机制下系统状态渐近收敛到零点.
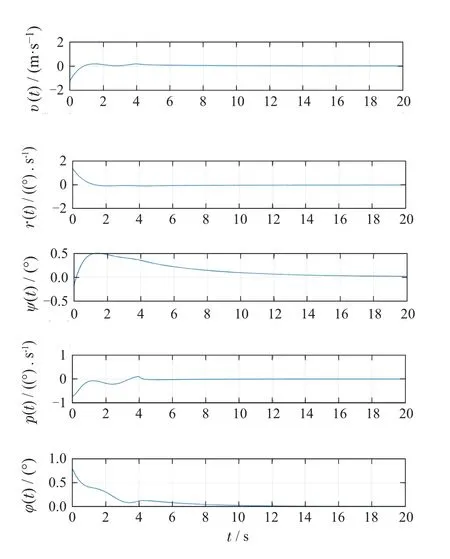
图2 无故障系统状态响应Fig.2 Evolution of system states with no fault
为评估所提出方法的故障检测性能,考虑执行器故障
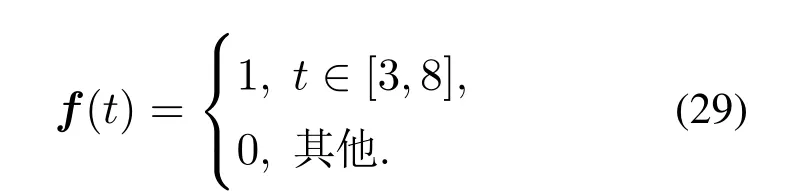
SFDC模块的残差响应如图3所示,故障的发生(t=3 s)对残差信号产生了显著的影响,这有助于减小故障检测所需的时间.残差评价函数及其阈值如图4所示,其中阈值χth=0.0035,SFDC模块在t=3.224 s检测到系统故障,即故障检测时间为0.224 s.注意到评价函数可能受到外部扰动信号ω(t)的影响,所提出的基于事件触发的SFDC方法不仅能够及时检测到系统故障,也能避免由外部扰动信号造成的误报.图5为事件触发器的触发时刻和触发间隔,在20 s的仿真时间里,事件触发器1和2的发包量仅分别为57和54个,与周期采样相比,通讯网络的带宽占用得到了显著降低.
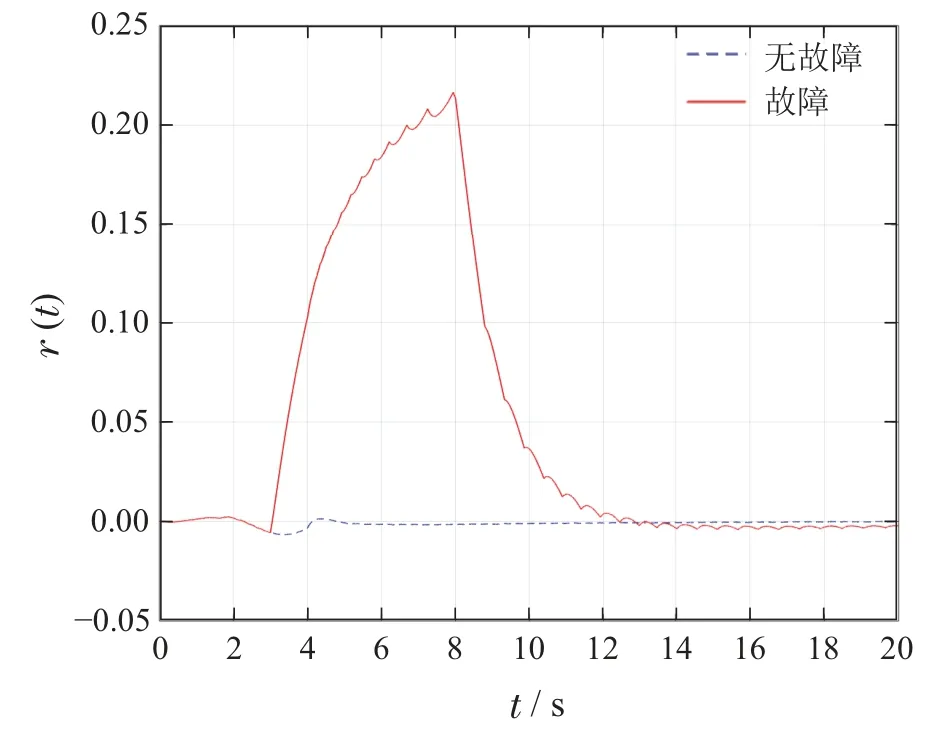
图3 残差响应Fig.3 Evolution of residual
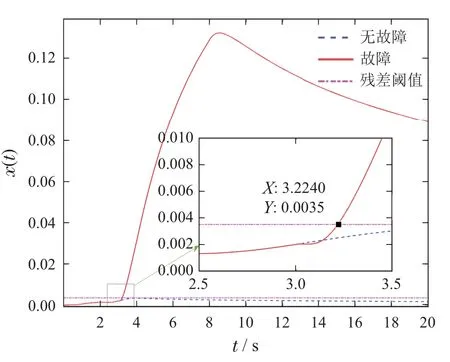
图4 残差评价函数响应Fig.4 Residual evaluation response χ(t)
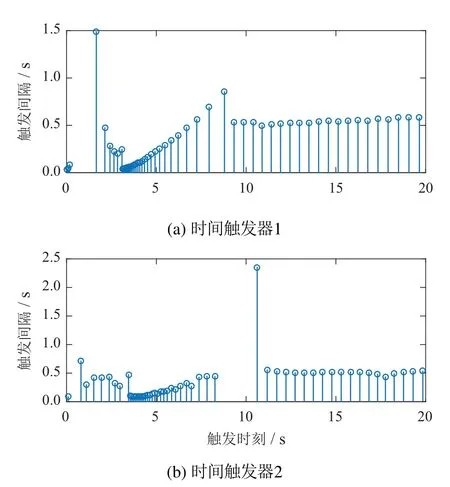
图5 故障系统触发时刻Fig.5 Evolution of event generators with fault
5 结论
本文研究了双通道积分型事件触发通信机制下USV系统的SFDC问题.两个积分型的事件触发器分别部署在传感器一侧和控制器一侧来减少通信资源的占用和系统能源的消耗.文章提出了基于观测器的故障检测器和控制器联合设计方法,并基于获得的SFDC 增益提出了事件触发条件的设计准则.所提出的方法不仅能够同时实现USV系统的故障检测和控制,也能有效降低通讯网络的发包量.最后,USV系统的仿真结果验证了所提出方法的有效性.
猜你喜欢
成都信息工程大学学报(2022年2期)2022-06-14
网络安全与数据管理(2022年3期)2022-05-23
湖北师范大学学报(自然科学版)(2021年3期)2021-09-08
昆明医科大学学报(2021年4期)2021-07-23
就业与保障(2021年23期)2021-04-06
北京航空航天大学学报(2020年10期)2020-11-14
北京航空航天大学学报(2019年9期)2019-10-26
电脑知识与技术(2018年22期)2018-11-26
电子制作(2018年10期)2018-08-04
电脑爱好者(2015年22期)2015-09-10