综放工作面放煤量激光扫描监测三维重建方法研究
2022-05-13 11:41:42王利栋
煤炭工程 2022年5期
王利栋
(晋能控股集团有限公司,山西 大同 037003)
目前,综放开采技术已成为我国厚煤层开采的主要方法[1,2]。在煤矿综放开采过程中,亟待解决的难题之一是如何正确判断放煤口最佳开闭时间,从而解决与智能化综放开采相配套的技术问题。目前,对于放煤口的开闭时间主要有两种方法,其一是由放煤工人通过视觉和听觉,以及经验积累来确定放煤口的开闭[3],这种方式会带来过放或者欠放情况发生,同时放煤过程会产生大量的粉尘和瓦斯,对放煤操作工人的生命健康造成巨大威胁。二是应用电液控制系统来实现放煤口的开闭[4,5],基本方法是在电液控制系统中嵌入预先设定的放煤程序,按照预先设定好的放煤动作及放煤时间实现放煤口的开闭。由于煤层厚度等因素的变化,如若放煤口开闭时间一成不变,同样导致放煤过程中出现过放或者欠放情况,使煤质下降或者资源遭受损失。因此,在智能化放煤过程中,放煤量三维重建是精准放煤的关键技术,通过分析放煤量三维模型,获取的煤流动态参数是采煤和放煤机构动作和控制的重要依据,也是煤流监控系统的重要技术指标。
另外,当前在煤矿井下运煤量监测方面,国内外同类技术多数用于固定式的带式输送机或转载机运煤量测量[6],对于总处于动态移置过程中的综放工作面放煤口及刮板机上煤量监测技术研究较少。本文充分考虑粉尘、水雾及光线等因素对激光扫描结果的影响,研究提出了一种基于激光扫描的综放工作面后刮板机煤量三维重建方法。该方法根据激光扫描原理,结合放煤工作面成套装备布置特点,将激光扫描仪安装在液压支架尾梁上,根据发射和接受反射回来的激光时间差,计算得到刮板机上煤流轮廓高度信息,按照时空域关系对点云进行配准,实时构建高精度的放煤量三维点云模型,并结合峰值信噪比和结构相似性的量化指标,证明算法的有效性。
由于井下综放工作面后部安装空间受限,本文采用激光扫描飞行时间原理[7],通过给目标连续发送光脉冲,然后用传感器接收从物体返回的光,通过探测这些发射和接收光脉冲的飞行(往返)时间来得到目标物距离。
1 实验系统整体设计
综放工作面的放煤过程要靠液压支架尾梁摆动以及插板的伸缩来实现,在煤岩沿液压支架尾梁滑落到液压支架下方的刮板输送机的过程中,从液压支架上方滑落下来的煤流的运移规律复杂,放煤过程中粉尘大,放煤口容易被支架后部结构件和工作面堆煤遮挡。因此,该系统考虑采取通过测量临近放煤口位置的刮板输送机上部煤流运动的特征信息的方式,构建高精度的放煤量三维点云模型。

图1 放煤量激光扫描检测系统方案
放煤量激光扫描检测系统方案如图1所示,在井下刮板机上方依托液压支架安装激光扫描装置。激光扫描装置对刮板机上的煤堆进行二维轮廓扫描,得到煤堆界面表面轮廓上的点云数据,该数据信息传输至工控机,经过数据处理和曲线拟合可得到煤堆的表面轮廓线,利用点云配准求取每帧点云数据之间的变换关系,按照时空域关系进行三维点云拼接,结合滤波算法对拼接后图像进行降噪处理,消除拼接误差和环境噪声。
激光扫描装置内置激光扫描传感器选用德国SICK公司的LMS111激光雷达,采用TOF激光扫描原理,非接触式在线检测,且具备IP68工业防护等级,使得即使在恶劣环境下也能准确测量。工控机内部集成化设计,搭载有分析处理模块、显示模块、电源模块。为了使测量数据能做到统一管理并及时高效地分析数据,选用M700SE型3.5寸微型工控主板,主板安装有用于通讯及分析处理的上位机软件,进行接收及自动分析数据;显示模块采用10寸工业嵌入式显示器,用于显示测量分析结果,并对上位机软件进行可视化控制;电源模块将外部提供的127V电压转换为激光扫描仪、微型工控主板以及显示模块使用的12V工作电压并为其供电。
2 放煤量模型三维重建
放煤量模型三维重建的主要原理是,按照时间关系对每帧激光数据排序,结合最近迭代点算法构建在空间上的位置关系,通过泰勒公式来描述物体形貌随时间的变化情况,形成具有较高精度的放煤三维点云。
2.1 最近迭代点算法
煤流轮廓扫描结果如图2所示,为不同时间下煤流轮廓的激光图像。这些图像以扫描中心为原点,形成了测量数据点围绕原点的极坐标系,其中红点为激光雷达的扫描中心,绿点为测量数据点。仅仅分析单幅激光图像,很难获取有用的放煤数据,可以看出图3(a)(b)(c)存在着一定的旋转、位移变换关系,调整各图像之间的位置关系来推算出具体的放煤情况,将形成直观且清晰的放煤三维点云。

图2 煤流轮廓扫描
在放煤量变化不大的情况下,图2(a)到图2(i)的每帧图像之间都存在刚体变换,见式(2),描述了帧与帧之间的刚体变换关系,P为当前帧图像的点集,P′为上一帧图像的点集,R、T为上一帧图像与当前图像点集之间的旋转、位移变换矩阵。可以利用最近迭代点算法(ICP)[8]求解其次变换矩阵R、T,对多帧激光图像进行点云配准,从而完成放煤三维点云的拼接。
P′=R·P+T
(1)

1)对于当前帧图像点集P的每个数据点,搜索其在上一帧图像点集P′中几何距离最近的点,并建立对应关系。
2)根据最小二乘法和点与点之间的对应关系,对目标函数f(R,T)中的R、T变换矩阵进行求解。
3)结合最小二乘法估计得到的R、T矩阵,变换得到新的当前帧点集P。
4)按照对应点间的关系,计算点集P和P′间的均方距离D,见式(3)。若均方距离小于收敛阈值,则结束迭代,输出点集Pn。若不满足,则继续步骤2)对目标函数f(R,T)中的R、T变换矩阵进行求解,变换得到新的点集P,继续迭代。
处理后煤流轮廓如图3所示,为经过ICP算法处理后的煤流轮廓。与图2对比,可以看出(b)(c)(e)(g)等的位移和旋转偏差被明显矫正了,初步验证了ICP算法的有效性。

图3 处理后煤流轮廓
2.2 高次项回归预测算法
然而实际工况中,放煤量的变化情况不可预知,ICP算法又对噪声敏感,常常陷入局部最优解,导致点云拼接时产生误差,点与点、面与面之间存在严重的重叠。通常情况下,可以利用移动最小二乘法(MLS)[9]对拼接后的点云进行降噪处理,消除拼接误差,但是移动最小二乘法在处理大量点云时耗时较长,当算法要求高实时性时,可以运用本文所提出的高次多项式回归算法,以部分精度为代价来降低算法耗时。
p(t)=p(t0)+p′(t0)(t-t0)+…+
该算法的基本思想是当被测物体轮廓不存在过于复杂的变化时,其轮廓曲线可以被泰勒公式所描述,式(4)为物体曲线的泰勒表达式,该表达式只可以用来描述物体形貌t0时刻邻域的变化,超出邻域将会造成Rn余项的巨大偏差。

图4 放煤曲线时空变化
放煤曲线时空变化如图4所示,结合最小二乘法,构建时空域关系,求取放煤曲线t时刻的泰勒表达式p(t)。式(5)选取n为5,阶数n过高时,容易引起过拟合现象,阶数过小时,会导致Rn余项偏差。f为损失函数,dt为t时刻的插值数据。式(6)为曲线t时刻的5阶表达式p(t)。
p(t)=a1t5+a2t4+a3t3+a4t2+a5t+a6
(6)
按照式(7)(8)(9),计算泰勒公式的参数矩阵A:
(8)
A=(XTX)-1XTP
(9)
其中,ti为第i帧的时间。
为了避免过拟合,使用正则化方法添加参数惩罚项,防止某些参数过大,改进后的损失函数:
经过光照渲染的三维重建效果如图5所示,其中黑色区域为煤流,绿色区域为刮板机。可以看出只使用ICP算法的点云存在着噪声、重叠等问题,而在ICP算法基础上结合本文提出的算法,则消除了噪音,得到了更贴近实际的点云图像。

图5 三维重建效果图
3 三维重建算法性能评价
为了进一步探究该算法的性能,选取了峰值信噪比(PSNR)和平均结构相似性(MSSIM),作为点云图像质量评价的量化指标[10]。
峰值信噪比(PSNR)的含义是指信号最大值和背景噪声之间的对数比值,当PSNR的值越大,就代表失真越少。式(11)中,MSE为均方误差,Ix(t,n)为参考点云图像x中t时刻第n个点到扫描中心的距离,Iy(t,n)为算法处理后点云y中t时刻第n个点到扫描中心的距离,激光雷达的最大测量距离为20000mm,所以最大信号比特数m取为15。
结构相似性(SSIM)通过比较参考图像和测试图像点云的平均深度、方差以及协方差的相似性,来评估图像的失真程度。式所示,为SSIM的表达式,μx、σx2、μy、σy2、σxy分别为点云图像x的平均深度和方差、点云图像y的平均深度和方差以及两图像之间的协方差。L1、L2为两个较小的数,防止分母等于0使等式不成立。
为了符合人眼聚焦的视觉习惯,需要对点云图像x、y进行分区处理,建立滑窗求取平均结构相似性(MSSIM)[11]。式(17)为平均结构相似性的表达式,xi,yi为x、y的第i个区块,M为区块总数。本文按照时间、空间排序,对点云图像进行了8×8的分块,因此M取为64。
3.1 粉尘适应性试验
在煤矿环境中,粉尘是影响激光雷达工作的主要因素。由于激光雷达产生的激光束会遇到空气中粉尘颗粒、气溶胶等成分,发生散射、吸收等作用,仅小部分反射能量被激光雷达接收,导致激光雷达精度大大降低。因此,有必要研究粉尘浓度对放煤量三维重建精度的影响,进而验证本文算法的可靠性。
在实验室环境下搭建了放煤量重建实验系统,包含了煤堆、激光雷达、实验架、带式输送机、鼓风机、煤灰、粉尘浓度检测器等。该系统利用煤灰和鼓风机得到不同粉尘浓度的实验环境,通过激光雷达扫描煤堆取得煤量三维重建模型,根据PSNR指标对重建模型质量评价,对比计算出不同粉尘浓度对煤量重建精度的影响。
PSNR变化如图6所示,为不同粉尘浓度下的PSNR变化曲线图,可以看出随着粉尘浓度的不断增加,PSNR指数不断下降,图像质量明显受到影响。然而,与原始图像比较,在粉尘浓度较大的情况下,本文算法的PSNR指标明显得到了提高,表明本文算法的图像质量得到了改善,能够适用于粉尘浓度较大的煤矿环境。
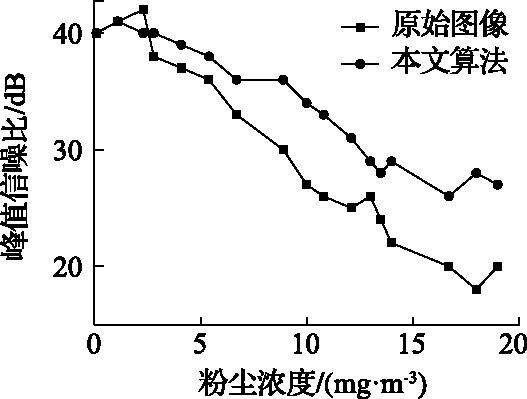
图6 PSNR变化折线图
3.2 放煤量重建工业性试验
在同煤集团塔山煤矿8222工作面采集后刮板机放煤量点云数据,建立了评价算法性能的测试集。
测试集点云的基本参数见表1。测试集的样本数量为140,采集设备的扫描频率为50Hz,工作面环境的光强范围为2.50~150lux,粉尘浓度为3.31mg/m3。受到环境条件限制,无法采集到真实的点云图像,将会使用经ICP配准和移动最小二乘法(MLS)算法处理后的测试集图像作为参考点云图像,比较不同算法之间的差异。

表1 测试集基本参数
为了更好地量化各算法之间的性能,采取了调和分数相乘的打分方法。与平均数分数相比,调和分数考虑到了方差问题,在总体方差较大的情况下,该方法更倾向于得到较小的分数。分数的计算方法见式(18),通过调和平均数PSNR′和MSSIM′相乘得到。

分数与噪声方差如图7所示,向测试集引入了不同噪声,图7初步描述了分数与噪声方差之间的关系,分数与均匀噪声、高斯噪声以及泊松噪声的斯皮尔曼相关系数(SROCC)[12-15]分别为-0.979、-0.980、-0.966,表明了噪声强度越大,分数越小,分数可以用来衡量图像失真程度。

图7 分数与噪声方差折线图
选取了统计滤波、半径滤波以及高斯滤波作为对照降噪算法[16-19],由ICP算法对测试集图像进行配准,结合PSNR和MSSIM两种指标,对本文算法的性能进行评价打分。
峰值信噪比和平均结构相似性分布折线分别如图8、9所示,可以看出各算法的PSNR和MSSIM分布呈现近似正态分布,性能更强的算法常具有均值大、方差小的特点。

图8 MSSIM分布折线图

图9 PSNR分布折线图
先对点云图像进行了ICP点云配准,利用不同算法对测试集图像进行降噪处理,求取了PSNR、MSSIM的调和数,计算了不同算法的性能分数,见表2。结合表、图,本文算法的分数远大于高斯滤波、半径滤波,略大于统计滤波,表明了本文所提出的算法具有比半径滤波、高斯滤波、统计滤波更强的去噪性能,更适用于综放工作面的放煤量的三维重建。

表2 算法性能评价
4 结 论
1)设计了基于激光扫描的放煤量实时监测系统,利用激光扫描仪获取临近放煤口位置的刮板运输机上煤流轮廓点云数据,进而构建放煤量三维模型。
2)提出了一种适用于综放工作面的三维重建方法,该方法利用了最近迭代点算法对多帧激光图像进行配准,按照时空域关系对点云图像进行拼接,设计了一种实时性强的高次回归滤波方法,用于消除拼接误差和环境噪声。
3)选取了峰值信噪比和平均结构相似性作为评价算法性能的量化指标,采取了调和数打分的评价方法,通过对比不同算法的分数,证明了本文算法具有较强的鲁棒性。
猜你喜欢
工矿自动化(2023年11期)2023-12-06 03:06:28
矿山安全信息(2022年12期)2022-11-25 01:52:50
矿山安全信息(2022年7期)2022-11-24 12:57:30
矿山安全信息(2022年24期)2022-11-24 11:04:23
矿山安全信息(2021年20期)2021-11-30 05:32:42
河南理工大学学报(自然科学版)(2021年4期)2021-06-18 07:04:20
山东电力技术(2020年7期)2020-08-11 12:10:32
中国煤炭(2019年10期)2019-11-25 03:44:30
煤炭学报(2019年9期)2019-10-21 08:10:46
江西煤炭科技(2015年2期)2015-11-07 03:10:10