
无人机电力电缆安全巡检关键技术开发与应用
2022-05-12 06:58田志平
机械管理开发 2022年2期
田志平
(沈阳煤业(集团)机械制造有限公司, 辽宁 沈阳 110123)
引言
利用无人机对电力线路进行检测的研究已经在人工智能领域展开。James 提出了一种遗传算法(GA) 来获得支持最短长度的有效巡检路径[1]。Prostejovsky 提出了一种基于四元数代数的无人机视觉检测高度控制系统,为了解决电力线检测的实时感知问题,提出了一种名为pline 的电力线检测算法[2]。采用遗传算法和粒子群优化相结合的方法,以最小化执行时间为目标,设计了一种复杂三维环境下的无人机轨迹调度方法。这些工作主要集中在如何利用无人机实现电力线检测系统,而没有考虑无人机的能量消耗和通信资源分配问题[3]。
无人机的能量效率问题在相关文献中进行了研究。无人机作为地面节点的通信中继,通过对其速度和负载进行联合优化,使网络能量效率最大化。多架无人机的部署在考虑能量约束的情况下,以飞行时间最小为目标进行优化。通过无人机轨迹优化,综合考虑通信吞吐量和无人机能耗,研究了无人机与地面终端之间的节能通信问题。Strasser 提出了一种无人机作为空中基站服务于地面设备的节能资源分配方案。Maharjan 提出了一种名为“平均模型”的参考小无人机模型,同时解决了飞机的稳定性和功耗问题。Golshani 提出了一种太阳能无人机的能量优化方法,即通过控制飞行姿态来优化飞行轨迹。
1 原理和方法
1.1 系统模型
1.1.1 电力线检测模型
基于无人机的电力线检测模型如图1 所示。电网拓扑可以看作是一个图。
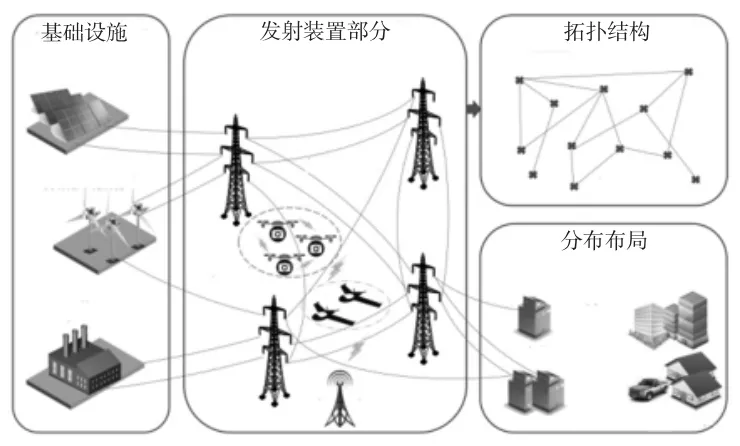
图1 基于无人机的电力线检测模型示意图
在检测过程中,无人机在电力线周围形成一个簇,并以相同的速度向前飞行,以便在同一时间内提供同一位置的多角度检测。安装在每个IUAV 上的通信设备有两个功能,分别是避免碰撞和图像数据传输。一方面,每个IUAV 每秒广播若干预定义信标,用于接收信号强度(RSS)为基础的距离测量。采用store-carry-forward-based 数据传输方法,所收集的IUAVs 数据暂时存储在本地存储设备,然后将数据传输到电网公司的服务器,对其进行处理和分析,找出潜在的问题,因此,数据传输是容忍延迟的。至于优化数据传递延迟,会在以后的工作中考虑。值得注意的是,正在执行其他任务的无人机,碰巧出现在无人潜航器附近,并不总是可用的。
1.1.2 推进能耗模型
采用稳态直线水平飞行(SSLF)模型建立推进能量消耗模型。SSLF 模型包含以下两个方面:一为IUAV 以恒定的速度向固定方向飞行,没有水平加速度和突然转弯;二为由于升重平衡,IUAV 在没有垂直加速度的情况下以恒定高度飞行。
1.1.3 碰撞能耗模型
避碰方案由三个阶段组成,分别是距离估计、碰撞警告和控制行动。只考虑距离估计的能量消耗,因为避碰控制规则和动作不在本工作的范围内。在无人机飞行过程中的标定距离为(k,k0),用来估计IUAV 间的距离,IUAV 需采用连续广播信标,广播信标的频率为(fk,k0)。考虑到噪声引起的估计不完全,定义了(δk,k0)作为距离的最大估计误差,可以通过碰撞预警和控制动作来补偿,从而实现成功的避碰。最大估计误差大于(δk,k0)的概率定义为Pr(δk,k0)。

1.2 两级节能电力线路检测算法
结合动态规划、拍卖理论和匹配理论提出节能电力线检测算法。首先,将联合优化问题转化为基于能耗大小和优化时间差异的两阶段优化问题;在此基础上,提出了一种基于动态规划的大规模优化方案,第二阶段结合拍卖理论和匹配理论求解小时间尺度优化问题。
1.2.1 联合优化问题转化
制定联合优化问题,其中包括两个轨迹等优化调度、速度控制和频率调节、固定的值在一段和不同时间尺度的秒,和继电器等优化选择和功率分配的值取决于信道衰落和毫秒时间尺度的变化。此外,大时间尺度优化问题的能耗目标值一般比小时间尺度优化问题的能耗目标值高几个数量级。
因此,为了提供解决方案,利用大时间尺度优化和小时间尺度优化之间的时间尺度差异作为先验知识来简化问题。大型时间表问题的解决在第一阶段不考虑第二阶段优化问题,然后时域问题已经解决了在第二阶段基于第一阶段的最优结果。因此,所提出的两阶段算法由于没有同时进行轨迹调度、速度控制、频率调节和功率分配的联合优化,会导致性能次优。
1.2.2 基于动态规划的节能轨迹调度、速度控制和频率调节
在本工作中,接下来采用DP 算法求解联合优化问题,该算法基于得到的每个分段的最小能量消耗。其原因在于DP 是一种经典的求最优解的算法,可以作为评价其他启发式算法的较高性能基准。
在DP 系统状态的演化的影响下,在离散阶段决策是由xτ+1=z(xτ,uτ)来决定的,其中τ=0,1,2,···,ψ-1,其中ψ 是阶段的总数,τ 是阶段系数,xτ和xτ+1是阶段τ 和阶段τ+1 的决策,假设uτ是τ 决定阶段z 为列举状态下的更新机制,将状态集设为目标点集,如xτ=k,将决策集设为轨迹调度变量集,如则状态更新形式为:

需要从目标点k 移动到目标点k',IUAV 在初始阶段x 时的最小能量消耗为0。
2 试验验证
在本节中,基于真实电网拓扑对所提出的两阶段能耗最小化算法进行评估。
图2 显示了路段能耗、飞行速度和距离估计信标的广播频率。能量消耗随速度增加先减小后增大,随广播频率单调增加。这是因为当单位速度增量所增加的推进能量消耗小于减少飞行持续时间所节省的能量时,能量消耗会随着速度的增加而减少。反之,能量消耗随速度增加而增加。
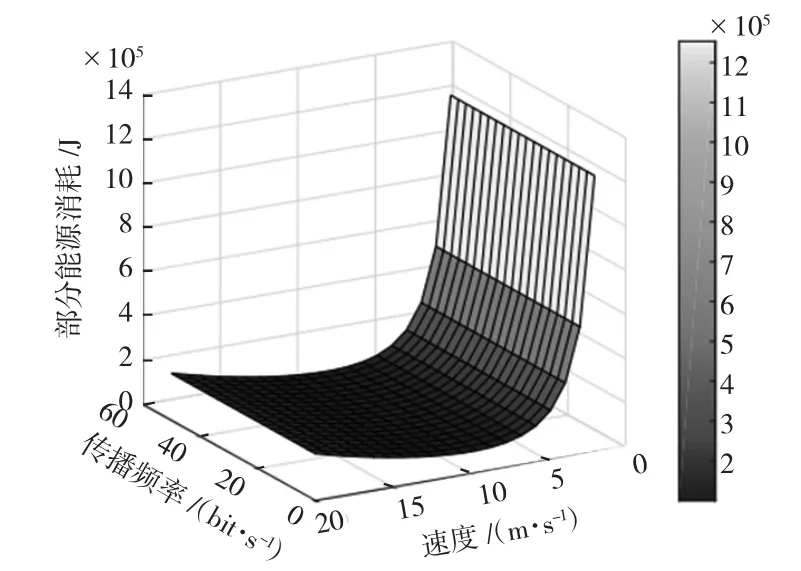
图2 能量消耗与飞行速度、信标广播频率的关系
图3为目标点数对总能耗的影响。贪婪算法总是选择点能量消耗最小的分段每个阶段,以及随机决定轨道、速度、广播频率、中继、发射功率的随机方案进行比较。数值结果表明,三种算法的能耗性能均随着目标点数的增加而增加。然而,所提算法的能量消耗增长率即曲线斜率,从能源效率角度考虑,由于多变量联合优化,曲线斜率远低于两种启发式算法。
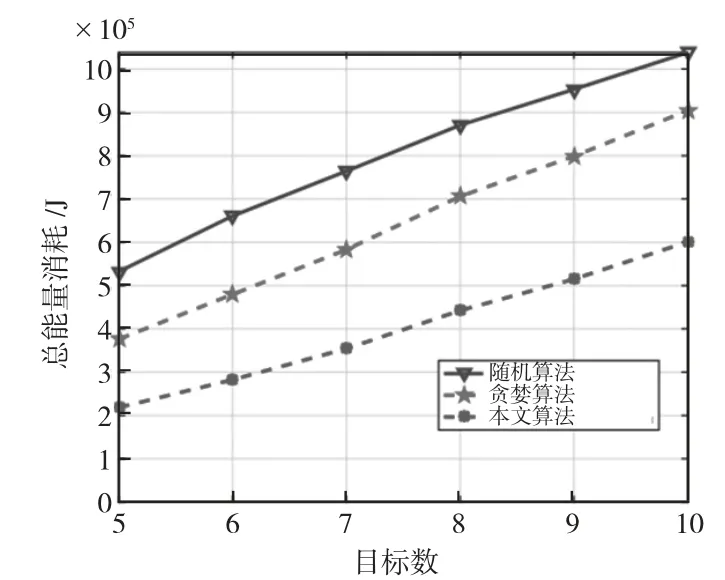
图3 目标点数对总能耗的影响
下页图4 显示了第二级能量消耗与无人机数量的关系。采用通过检查每个可能的组合来获得最优性能的蛮力搜索方案作为性能基准。结果表明,当无人机数量N=5 时,该算法可达到最优性能的87.6%,比随机分配方案的性能提高了41.8%以上。背后的原因是继电器的选择启发式算法不与功率控制联合优化。
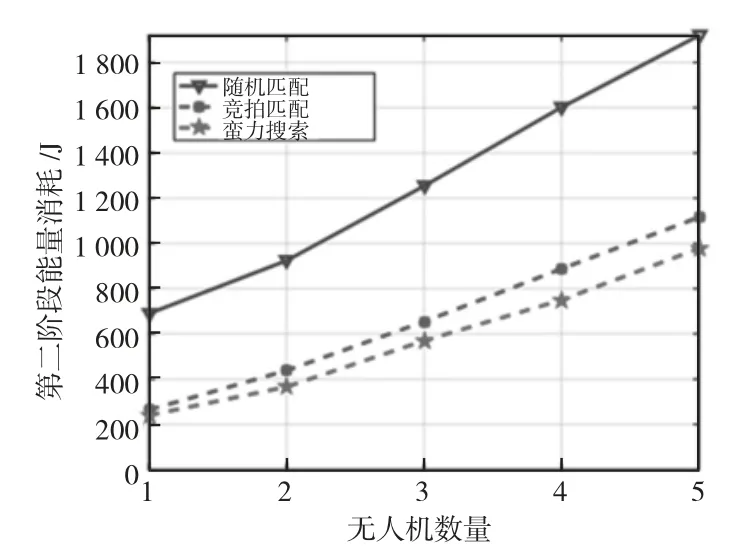
图4 第二阶段的能耗与无人机数量的对比
下页图5 显示了降低能耗和计算复杂度之间的权衡。数值结果表明,联合优化轨迹调度、速度控制和频率调节可在增加73.2%计算复杂度的前提下,实现75.1%的节能增益。特别需要指出的是,与总能耗相比,继电器选择和功率分配的联合优化所节省的能量是微不足道的。其原因是推进功率通常比数据传输功率高几个数量级。因此,需要适当考虑节能收益和计算复杂性成本,以实现满意的能效性能。
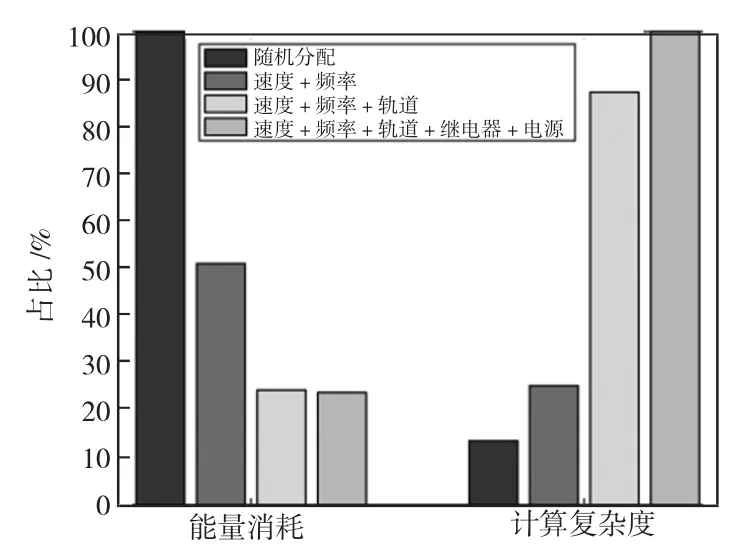
图5 降低能耗和计算复杂度之间的权衡
3 结论
本文以基于无人机智能电网电力线检测为研究对象,提出了一种两级节能型联合轨迹调度、速度控制、频率调节和功率分配算法。将该算法与其他基于真实地图和电网拓扑的启发式算法进行了比较,并通过数值结果验证了该算法在节能方面的优越性。
猜你喜欢
体育科技文献通报(2022年4期)2022-10-21
体育科技文献通报(2022年3期)2022-05-23
力学学报(2021年7期)2021-11-09
能源工程(2021年1期)2021-04-13
苏州科技大学学报(自然科学版)(2021年1期)2021-03-24
作文中学版(2020年1期)2020-11-25
铁路计算机应用(2020年5期)2020-06-02
苏州科技大学学报(自然科学版)(2020年1期)2020-04-13
测绘通报(2019年7期)2019-08-07
汽车文摘(2017年5期)2017-12-05
