基于自适应下垂控制的风电场无功电压控制策略
2022-05-10 12:08王康平张兴科刘财华沈希澄周霞
综合智慧能源 2022年4期
王康平,张兴科,刘财华,沈希澄,周霞*
(1.国家电网有限公司西北分部,西安 710048;2.国电南瑞科技股份有限公司,南京 211106;3.南京邮电大学先进技术研究院,南京 210023)
0 引言
风力发电作为一种可再生能源发电技术,已经被广泛应用于电力系统中,然而风电大规模并网往往会对系统的稳定运行造成影响[1-2]。国内风电场一般位于偏远地区,所连接的电网稳定性相对薄弱,当风电场输出功率发生较大变化时,会使并网点电压稳定性明显降低,进而影响电力系统的安全稳定。
我国发生的多起风电机组连锁脱网事故,都与风电场无功功率和电压控制有密切的关系[3-6]。目前国内外针对风电场无功功率补偿和并网点电压控制方法的研究,主要从2 个方面进行:(1)在系统中配置无功补偿设备以保障风电场的电压稳定[7-10];(2)从风电场自身出发,设计风电场无功控制策略[11-13]。
永磁直驱式风电机组与双馈式风电机组都具有一定的无功调节能力,当电网跌落较小时,依靠风电机组自身的无功补偿可以满足要求。当电网电压跌落较大时,需要在风电场装设无功补偿装置来实现无功控制[14-16]。
文献[17]分析了不同风电机组的无功电压特性,得出永磁直驱式风电机组对比鼠笼式异步机组、双馈式机组具有更好的无功电压特性。当系统电压降低时,永磁直驱式风电机组的网侧变流器对有功功率、无功功率解耦控制,通过调节能够快速向电网提供一定无功支撑[18-19]。然而目前风电机组电压控制策略普遍采用固定下垂增益,无法根据各风电机组的无功容量进行合理分配。文献[20]提出了适用于永磁直驱式风电机组的自适应下垂控制策略,充分利用风电机组变流器的无功补偿,以提高对并网点电压支持能力。
以上研究均存在不足,在对风电场进行下垂控制时没有合理分配每个机组的无功功率。风电机组有功功率削减策略相关研究中,未对削减量与削减顺序进行优化分配。
针对以上研究中的不足,本文提出了基于自适应下垂控制的风电场无功电压控制策略。将风电机组变流器设计为2 种工作模式:最大功率点跟踪模式和有功功率削减模式。当并网点电压正常,变流器采用最大功率点跟踪(MPPT)控制模式,以实现最大风能捕获;当并网点电压越限且变流器无功容量不足时,转入有功功率削减控制模式,计算各风电机组的有功功率削减优先级,对高优先级风电机组的有功功率输出进行定量削减,以满足系统的无功需求。最后,在PSCAD/EMTDC 平台建立模型,并通过与传统方法进行对比,证明了本文策略的可行性。
1 风电机组运行特性分析
以永磁直驱风电机组为例,其基本组成包括风力机、永磁同步电机、全功率变流器和控制系统,结构如图1所示。
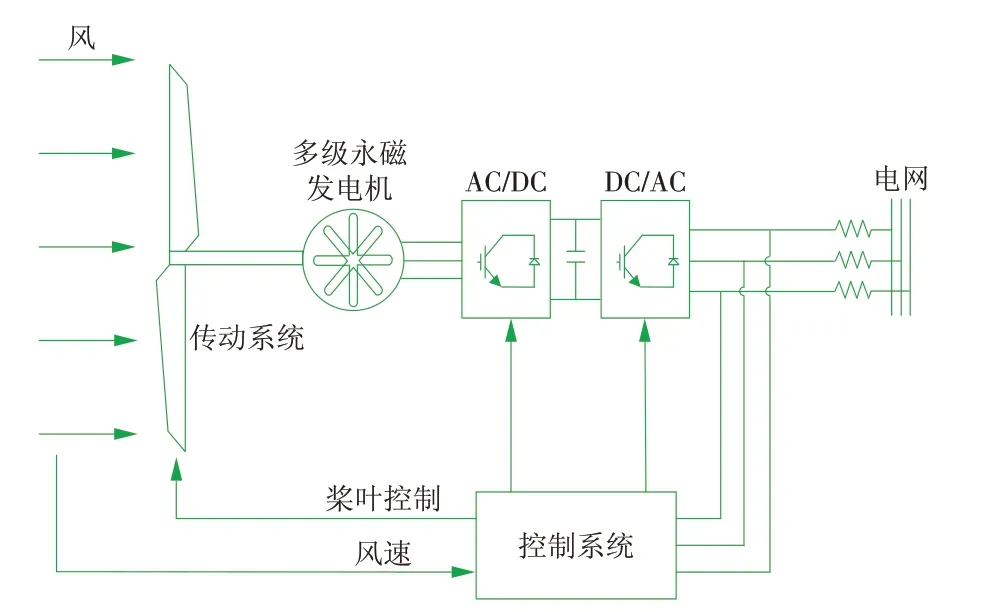
图1 直驱风电机组结构Fig.1 Structure of the PMSG
风力机将风能转变为机械能的方程为
式中:Pt为风力机的输出功率;ρ为空气密度;R为风轮半径;vw为当前风速;Cp为风能利用系数;λ为叶尖速比;β为桨距角;ω为风力机转速。
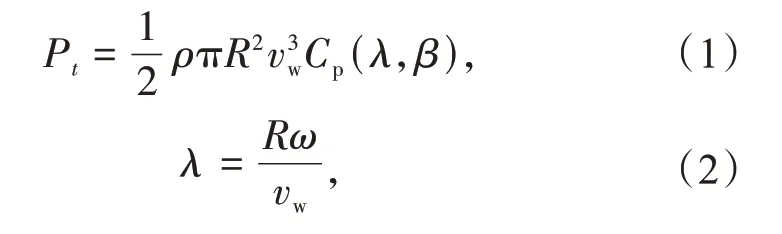
当桨距角一定时,可通过调节叶尖速比使风能利用系数达到最大值,如图2 所示,图中v1,v2,v3,v4为风速,Popt为最佳功率。风电机组运行过程中,通过控制风力机转速,使其保持当前风速所对应的最佳转速,即可得到最大风能利用率。
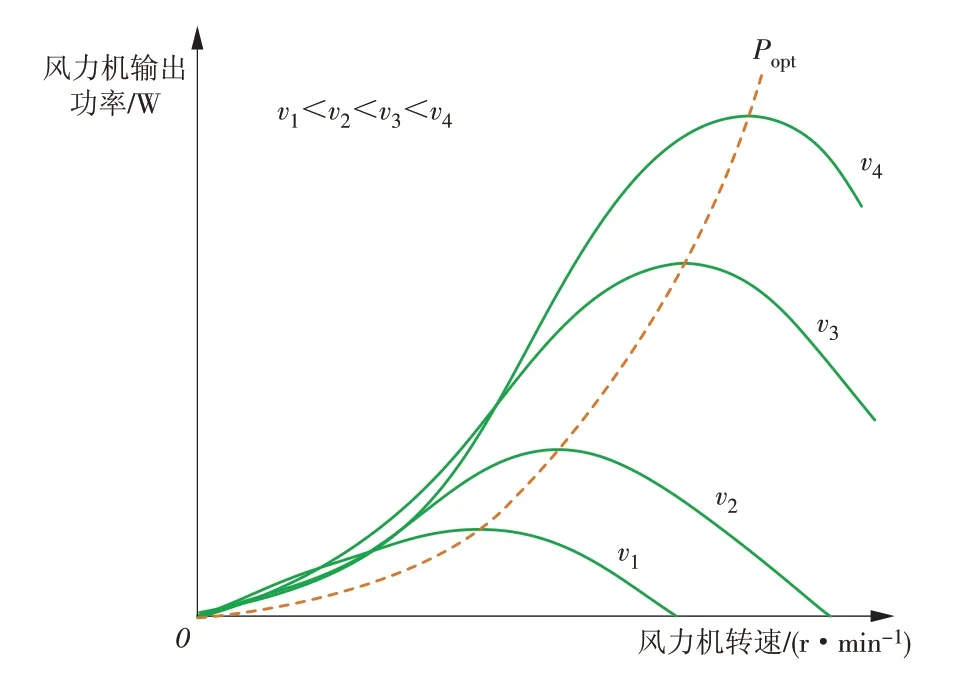
图2 风力机输出功率与风力机转速的关系曲线Fig.2 Relationship between the power output and speed of the wind turbine
风电机组输出无功功率由变流器有功功率与视在功率决定,为

式中:SW为风电机组变流器视在功率。
在极端条件下,风电机组输出功率已达到额定功率且无功功率缺额较大,可根据有功功率与无功功率的关系,通过减载运行来增加风电机组的无功功率裕度。
不同风速下,风电机组输出有功功率、无功功率的范围如图3所示。
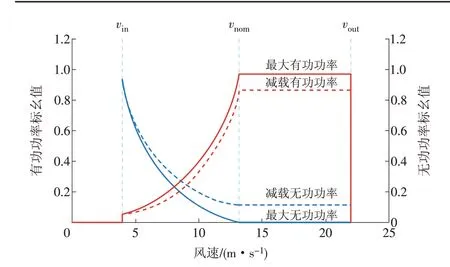
图3 风电机组有功功率、无功功率范围Fig.3 Active and reactive power ranges of the PMSG
当风速较大时,风电机组输出的无功功率较小,可以通过削减有功功率来提高无功功率裕度。当输入风速大于等于额定风速时,若不进行有功功率削减,则几乎没有无功调节能力。
2 自适应下垂无功电压控制策略
2.1 控制流程
本文提出了基于自适应下垂控制的风电场无功电压控制策略包含MPPT 控制和有功功率削减控制2种模式。具体的控制流程如图4所示。

图4 风电场自适应无功电压控制流程Fig.4 Process of WPP reactive power and voltage adaptive control
风电机组变流器采用自适应下垂控制,输出无功功率以支撑并网点电压。机组通常情况工作在MPPT 模式下,以实现最大风能捕获。当并网点电压越限且变流器无功容量不足时,转入有功功率削减模式,根据有功功率削减算法,计算有功功率削减优先级,定量削减各风电机组的有功功率输出,提供无功支撑以解决电压越限问题。
2.2 MPPT控制
通常情况下,系统正常运行且并网点电压稳定,为使风电机组输出最大功率,采用MPPT 控制模式。当风速位于切入风速与额定风速之间,为使风能利用系数Cp达到最大值,需要根据当前风速调整风力机转速。当风速位于最大风能跟踪区时,风力机桨距角β维持0°,由式(2)可知,风能利用系数Cp由叶尖速比λ决定。
当风力机叶尖速比为λopt时,即可使风能利用系数保持最大值,如图5 所示。每一风速下都有与之对应的最佳转速,为使用风能利用系数最大,只需控制风力机转速跟踪最优转速即可实现最大功率跟踪控制。

图5 风能利用系数与叶尖速比关系曲线Fig.5 Relationship between power coefficient and the tip speed ratio of the wind turbine
2.3 自适应下垂控制
受风速波动、风向等因素影响,风电场内的风电机组具有不同的输入风速,导致每个机组的无功容量不同,为确保风电场的安全稳定运行,网侧变流器可采用自适应下垂控制,如图6所示。
下垂控制回路的输出ΔQi可定义为
式中:Vsys为有效电压;Vnom为额定电压;AGi(vi)为自适应下垂系数。自适应下垂系数与风电机组的无功功率成正比,为

由式(5)可知,自适应下垂系数是关于空间和时间的变量,原因在于风电场的集群效应使得不同风电机组具有不同的无功容量。
为提高电压支撑能力,对无功容量较多的风电机组设置较大的下垂系数,对无功容量较少的机组设置较小的下垂系数,当输入风速大于额定风速时,下垂系数设为0。
风电机组的输入风速也会随时间变化,下垂系数可以随风速的变化进行自适应调整,有助于系统稳定运行。
此外,由于下垂系数可跟随增大的无功容量自适应增加,避免了风电机组频繁达到最大无功功率限制,有助于减少变流器的磨损。
2.4 有功功率削减控制
当并网点出现较为严重的电压越限时,可对部分风电机组进行有功功率削减控制,使其释放出更多的无功容量,以解决自适应下垂控制输出的无功功率无法满足系统的无功需求的问题。
风电机组无功功率与有功功率关系如图7 所示,风电机组初始运行在a点,此时有功功率为P1,无功功率为0。如果发生干扰,导致电压越限,相应的无功功率将被提供或吸收,工作状态从a点变化到b(b1)点。在b(b1)点可以被提供或吸收的最大无功功率为Q1。若无功缺额仍然存在,则进行有功功率 削 减 控 制,工 作 状 态 从b(b1)点 变 到c,d(c1,d1)点。
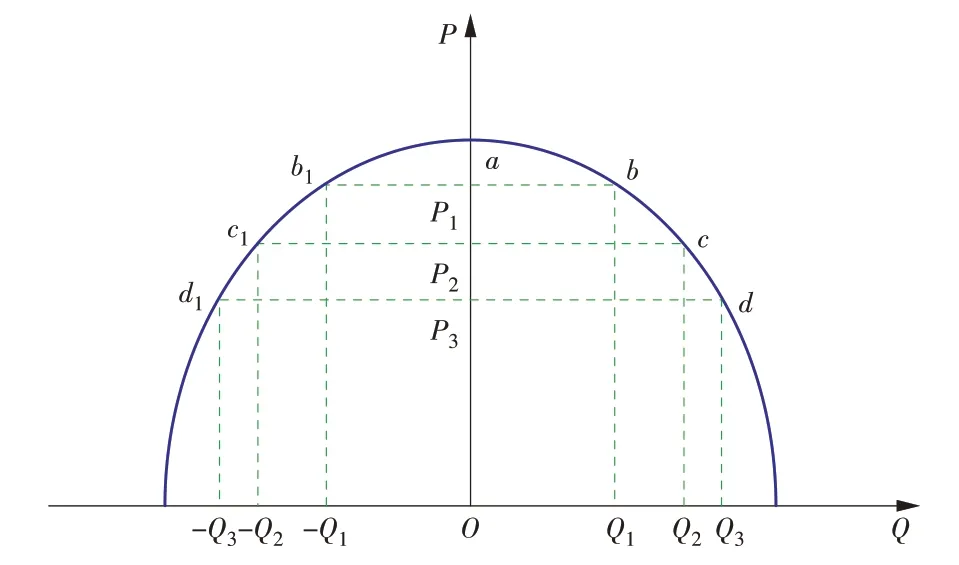
图7 风电机组无功功率与有功功率的关系Fig.7 Relationship between active and reactive power of thePMSG
当进行有功功率削减控制后,风电机组无功容量的增加值为

3 控制器设计
永磁直驱式风电机组采用背靠背双脉冲宽度调制(PWM)变流器结构,由网侧变流器与机侧变流器组成。
网侧变流器对网侧dq轴电流进行调节,以控制直流侧电压,同时对输出有功功率、无功功率进行解耦控制;机侧变流器能调节风电机转速,实现最大风能捕获的功能。
机侧变流器采用零d轴电流控制,令直轴定子电流ids=0,当直轴电感Ld与交轴电感Lq相等时,发电机电磁转矩Te与交轴电流iqs成线性关系。需要进行转速控制时,可通过交轴电流进而改变电磁转矩,以控制转速。
网侧变流器使用电压定向控制策略,根据变流器功率解耦控制原理,变流器输出功率可表示为
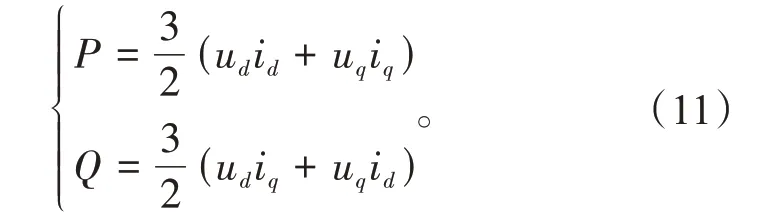
将电网电压矢量定向在dq坐标系的d轴上,q轴电压uq等于0。由此计算出系统有功功率、无功功率表达式为
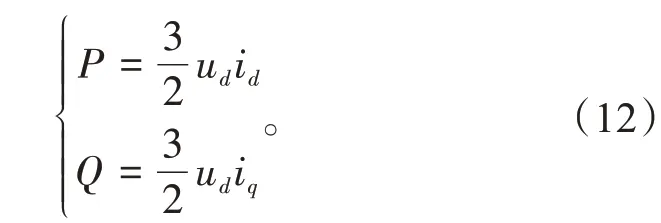
由式(12)可知:通过控制d轴电流id,q轴电流iq就可以控制变流器向电网输出的有功功率和无功功率。
总体控制器结构如图8 所示,由机侧控制与网侧控制2部分组成。机侧控制中,可选择MPPT控制与有功功率削减控制,控制器按照所选模式对应的算法向变流器输入有功功率电流参考值。网侧控制中,自适应下垂控制生成无功功率电流参考值。电流参考值经过控制环节输出电压参考值,最后经过空间矢量调制输出变流器所需的PWM 驱动信号,实现有功功率和无功功率的控制。

图8 控制器结构Fig.8 Controller structure
3.1 MPPT控制
3.2 有功功率削减控制
当并网点发生电压越限且变流器无功容量不足时,采用有功功率削减控制。削减部分风电机组的有功功率,发出更多的无功功率,为并网点提供无功支持。首先根据式(8)确定有功功率削减次序,再对相应风电机组进行有功功率削减。
有功功率削减控制过程可表示为
式中:Udref为电压信号参考值;idref为有功电流的参考值;id,iq为d,q轴电流实测值;kp,ki为比例积分(PI)环节参数;ω为转子角速度;L为电感;Pref为风电机组有功功率削减后输出的有功功率;P为变流器输出的有功功率值;ΔP为单次有功功率削减量;α为削减次数。
3.3 无功功率自适应下垂控制
无功功率自适应下垂控制根据各风电机组运行状态设置无功功率输出参考值,为系统提供充足的无功功率,以保障并网点电压稳定(电压标幺值0.95~1.05)。
无功功率自适应下垂控制过程可表示为

式中:Q为输出的无功功率;Upcc为并网点电压;Uref为并网点的参考电压值;K为下垂系数;iqref为无功功率电流的参考值。
4 算例分析
本文利用PSCAD/EMTDC 电磁暂态仿真平台建立风电场并网模型。风电场并网模型如图9 所示,系统由额定输出1.5 MW 的永磁直驱式风电机组、静态负荷与同步发电机组成。
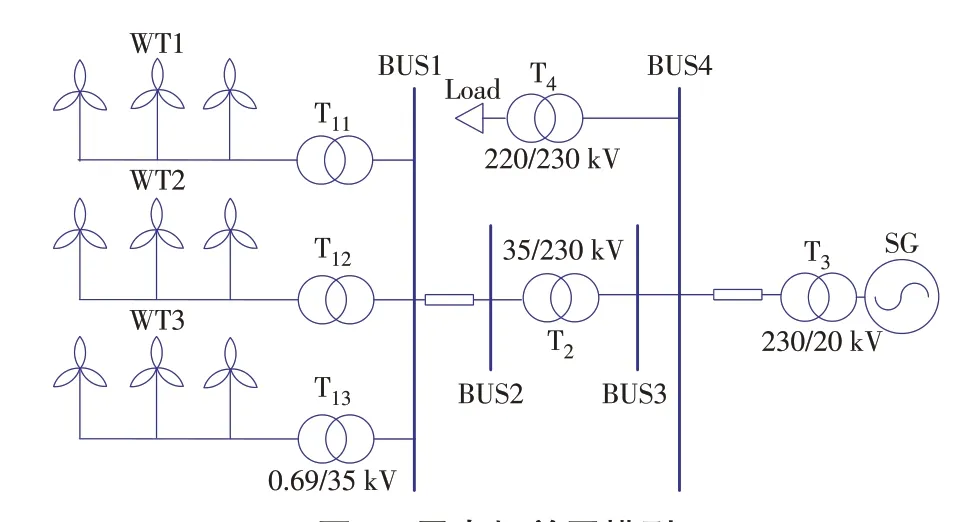
图9 风电场并网模型Fig.9 WPP integration model
4.1 自适应下垂控制
为比较不同控制策略的效果,比较自适应下垂控制、固定下垂控制和无控制3 种情况下的无功功率与电压有效值。
受不同风速影响,各风电机组有功功率输出分别为1.41,1.09,0.84 MW,5~15 s 之间在并网点加入1.2 MV·A 的感性无功负载,此时系统无功功率不足,并网点电压下降。固定下垂控制和自适应下垂控制下每个风电机组的无功功率输出如图10—11所示。
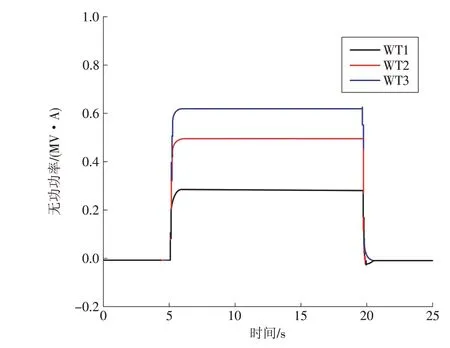
图10 固定下垂控制下风电机组的无功功率Fig.10 Reactive power output of the WPP in constant droop control
自适应下垂控制模式下,变流器可根据各个风电机组的无功容量对其无功功率输出量进行调整,从而为并网点提供更多的无功支撑。而在固定下垂控制中,风电机组的无功功率输出量受下垂系数的限制,导致其无功功率输出无法满足并网点无功需求。
由图10 —12 对比可知,风电机组在自适应下垂控制下相比固定下垂控制输出更多无功功率,同时并网点电压标幺值在自适应下垂控制下为0.953,相比固定下垂控制的电压标幺值0.945有所提升,证明自适应下垂控制拥有较好的电压控制能力。
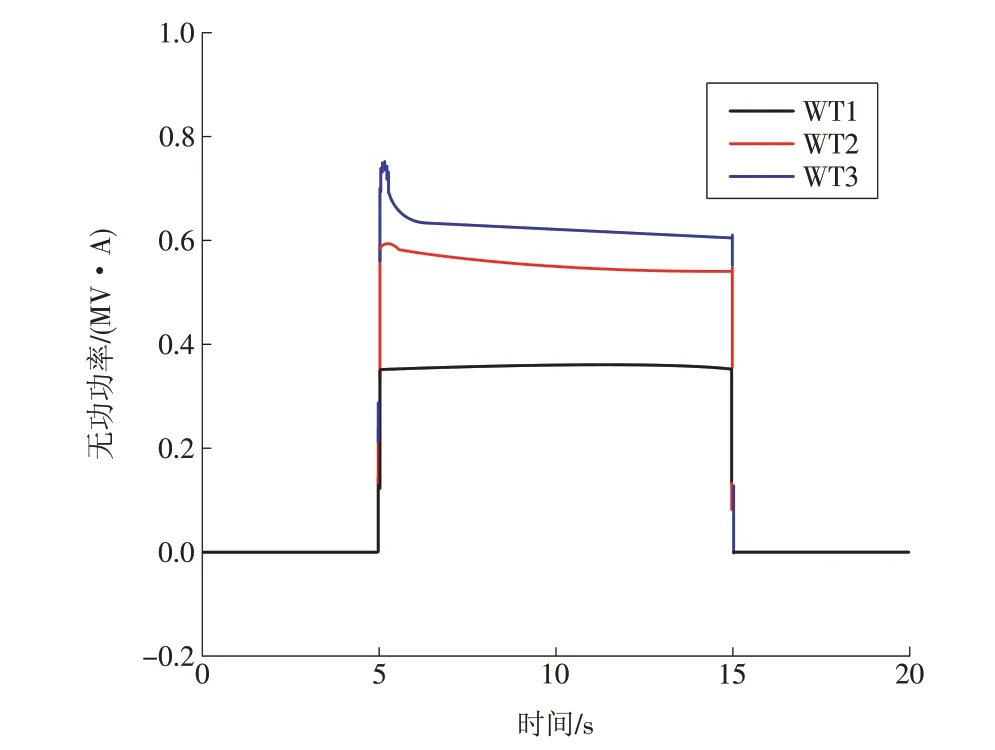
图11 自适应下垂控制下风电机组的无功功率Fig.11 Reactive power output of the WPP in adaptive droop control
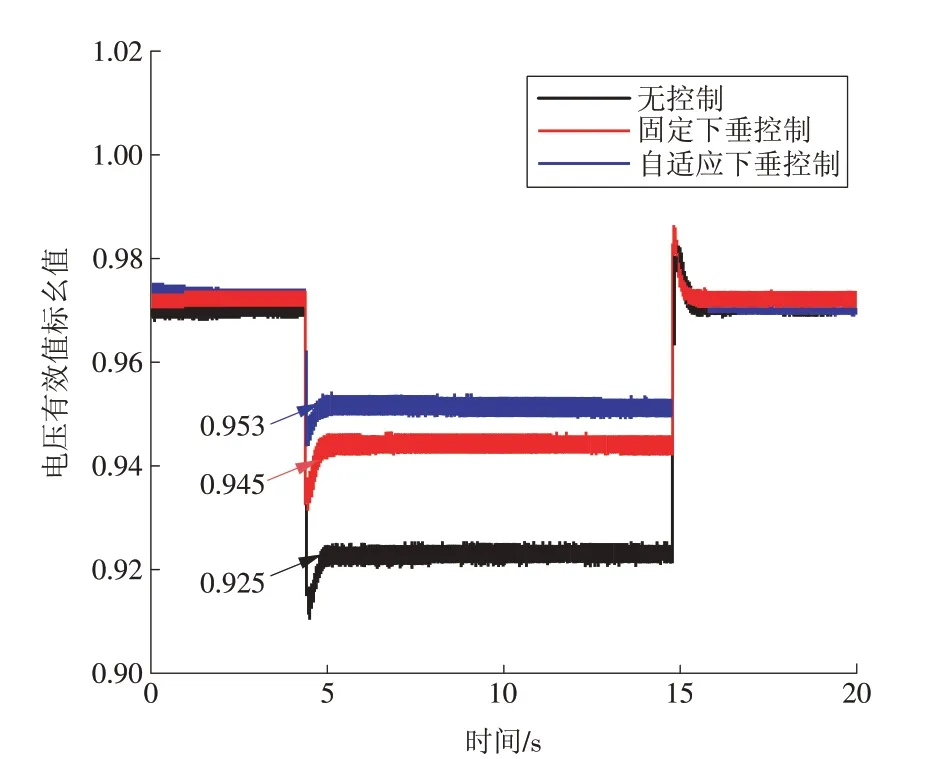
图12 不同控制策略下的并网点电压Fig.12 Voltage at grid connection point under different control strategies
4.2 有功功率削减控制
图13—15 为有功功率削减控制策略下各风电机组输出的有功功率、无功功率以及并网点电压水平。3台风电机组分别输出1.42,1.15,0.84 MW 有功功率。5~15 s 之间在并网点加入1.2 MV·A 的感性无功负荷,导致系统无功容量不足,并网点电压下降。
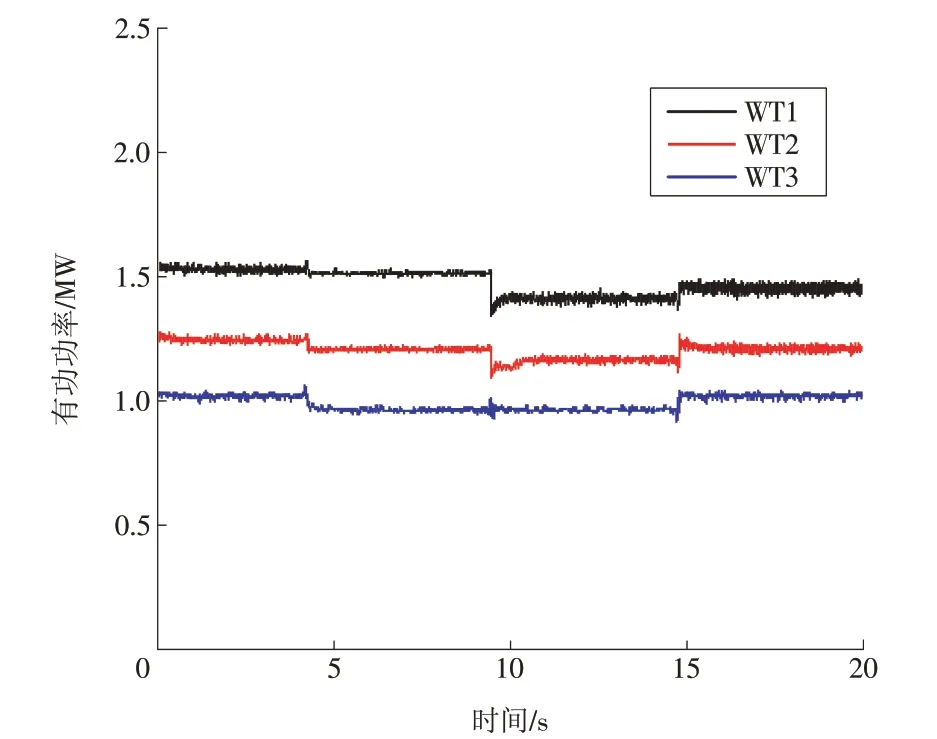
图13 有功功率削减控制下风电机组的有功功率Fig.13 Active power output of the WPP in active power curtailment control
尽管在运行过程中,始终保持自适应下垂控制,各风电机组根据自身容量向系统输出无功功率。但由于无功缺额较大,并网点电压标幺值依然越限(0.943)。此时采用有功功率削减控制:首先利用算法实时判别各机组削减优先级,之后对部分优先级较高的风电机组进行定量削减,在10 s 时对风电机组进行有功功率削减。经过有功功率削减后,风电场电压标幺值恢复到0.952,处于正常范围内。由此可见,有功功率削减控制能够有效处理并网点电压越限问题。
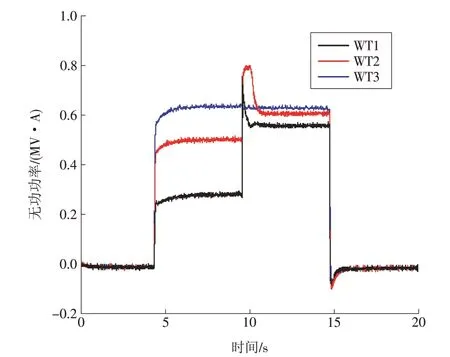
图14 有功功率削减控制下风电机组的无功功率Fig.14 Reactive power of the WPP with the active power curtailment

图15 有功功率削减控制下的并网点电压Fig.15 Voltage at grid connection point with the active power curtailment
5 结论
本文针对风电场并网点无功电压问题,分析了自适应下垂控制与有功功率削减控制在无功电压控制中的作用,提出了基于自适应下垂控制的无功电压控制策略,得出以下结论。
(1)在风电机组网侧变流器采用自适应下垂控制策略,相比固定下垂系数控制,可在不同情况下根据风电场内各机组的运行状态,自动调节下垂系数,合理分配各机组的无功功率输出量,对系统提供无功支持,以提升系统运行稳定性。
(2)并网点电压越限时,根据削减优先级判别算法,对优先级较高的部分风电机组输出的有功功率进行定量削减,变流器能够产生更多无功功率来支持并网点电压,有效解决并网点电压越限问题。
(本文责编:张帆)
猜你喜欢
农业工程学报(2022年7期)2022-07-09
河北农机(2021年12期)2022-01-06
科学技术创新(2021年21期)2021-07-30
能源工程(2021年2期)2021-07-21
铁道机车车辆(2021年3期)2021-07-12
能源工程(2021年1期)2021-04-13
船舶标准化工程师(2020年1期)2020-06-12
船舶与海洋工程(2019年6期)2019-12-25
电子制作(2019年10期)2019-06-17
电子制作(2018年17期)2018-09-28