新型水下负压-电磁吸附清洗机器人结构方案设计*
2022-05-05 00:59瞿思涵顾宇琳
南方农机 2022年9期
瞿思涵 ,赵 淼 ,顾宇琳 ,朱 慧
(南通理工学院电气与能源工程学院,江苏 南通 226000)
由于船舶长时间在海洋环境下工作,而且许多船舶都是由金属材料制成,所以表面易遭受海水盐碱的侵蚀以及难以清除的海底海洋生物的附着。海洋生物的附着污损问题严重限制了船舶行业的发展,船舶的航行速度会因此出现显著性的下降,为保持原有航速,油量也会明显增多,从而大幅度提高船舶的运输成本,加大营运成本。因此,水下清理船体表面作业刻不容缓。目前,市场上较为广泛的船体表面清刷主要有坞内清刷和水下清刷,但其缺点也较明显。坞内清刷较易增加船舶的停航损失,造成环境的二次污染;人工水下清刷则会耗费大量人力资源等,成本较高,且具有较高的风险[1]。因此,结合国内船舶清理工作现状,为了能够高效率、低成本地有效清理船体表面,设计一种新型水下负压-电磁吸附清洗机器人。
1 总体方案
1.1 整体结构
该机器人的基本结构包括基板、转动机构一、转动板、空化射流喷头、抽气管、转动机构二、移动机构和电磁吸附块等[2]。该结构以基板为主体,转动机构一设在基板两侧,转动板则连接在两个转动机构一之间,空化射流喷头以阵列方式设置在基板一侧的安装板上。端部设有喇叭状柔性圈的抽气管通过转动连接在基板上的通孔二中,转动机构二则连接在抽气管和基板之间。移动机构滑动安装在滑槽中[3],移动机构上连接着电磁吸附块,空心立方体结构的电磁吸附块,其内部空腔中设置有电磁线圈[4]。基本结构示意图,如图1、图2所示。

图1 基本结构示意图一

图2 基本结构示意图二
1.2 局部结构
1.2.1 基板
基板上阵列开有通孔一、通孔二位于基板中心部位,基板表面还阵列设置有四个滑槽和四个挡板,基板两侧设置有转动机构一,两个转动机构一之间则由转动板连接。空化射流喷头阵列设置在安装板上,并与输送空化射流的管道相连[5]。端部设有喇叭状柔性圈的抽气管连接在通孔二中,并与抽气泵相连,转动机构二则连接在抽气管和基板之间。电磁吸附块为空心立方体结构,其内部空腔中设置有电磁线圈,它连接在移动机构上,移动机构滑动安装在滑槽中。基板结构图如图3所示。

图3 新型基板的结构图
1.2.2 转动机构一
转动机构一中包括电机一、锥齿轮一和转动块[6]。电机一连接在基板的侧面上,锥齿轮一连接在电机一的输出轴上,转动块转动连接在基板侧面并与转动板相连,转动块上有锥形齿面,锥齿轮一与锥形齿面相互啮合。转动机构一详图如图4所示。
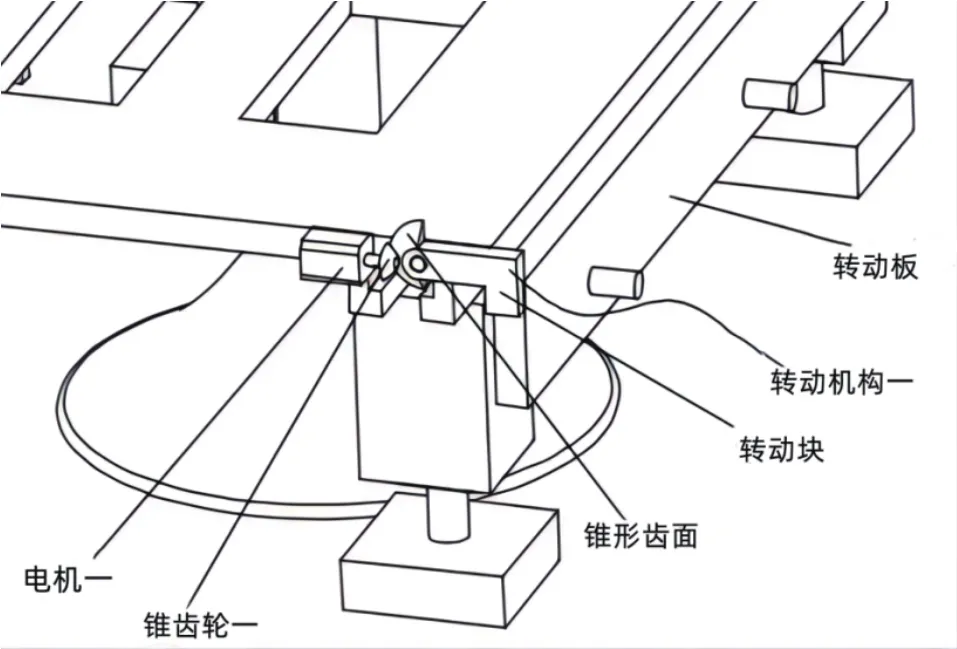
图4 转动机构一详图
1.2.3 转动机构二
转动机构二包括电机二、锥齿轮二和锥齿轮三。电机二连接在基板上,锥齿轮二连接在电机二的输出轴上,锥齿轮三连接在抽气管上且锥齿轮二和锥齿轮三相互啮合。转动机构二详图如图5所示。
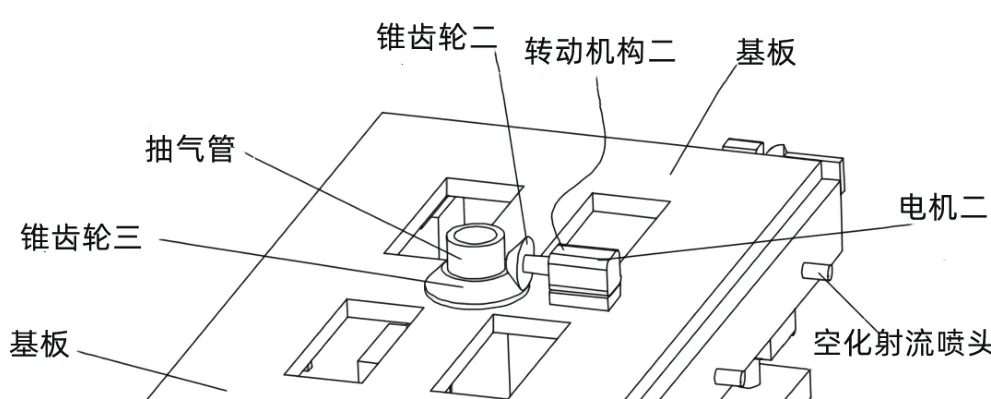
图5 转动机构二详图
1.2.4 移动机构
移动机构包括滑块、电动伸缩杆一和电动伸缩杆二。滑块滑动连接在滑槽中,滑块的一端开有凹槽,则电动伸缩杆一固定在凹槽中[7],电动伸缩杆一的活动端与电磁吸附块相连,电动伸缩杆二连接在挡板和滑块之间。电磁吸附块和滑块的结构图分别如图6和图7所示。

图6 电磁吸附块的结构图
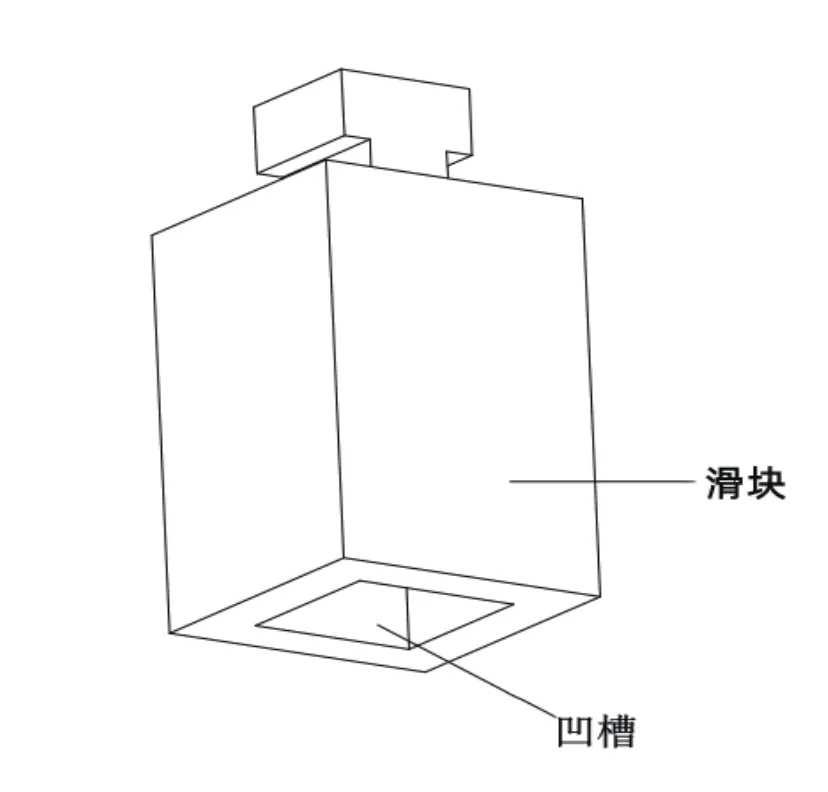
图7 滑块的结构图
2 工作原理及过程
首先,通过使电磁线圈通电产生磁力,将机器人安装在船体表面。机器人在船体表面移动主要依靠电动伸缩杆的收缩,排气管对气体的掌握,海水对柔性圈的压力。因此,机器人移动时,操控电动伸缩杆二的缩回,直至柔性圈紧贴船舶表面,接着向排气管中鼓气,使排气管中的海水排出,再从抽气管中抽气为其创造负压环境[8]。与此同时,将电磁线圈断电,通过海水对柔性线圈的压力将机器人牢牢固定在船舶表面[9],然后缩回电动伸缩杆二,再启动电动伸缩杆一移动电磁吸附块,此刻再给电磁线圈通电产生相应的磁力将电磁吸附块固定,消除排气管中的负压,继续伸长电动伸缩杆二后伸长电动伸缩杆一完成基板的移动[10]。机器人转动主要靠电机二启动和气管转动,在气管单独负压吸附时,启动电机二,使基板围绕排气管进行一系列转动,当到达工作区域后,机器控制空化射流喷头,气体从中喷出,并可以通过电机一来控制空化射流的方向。
3 新型水下负压-电磁吸附清洗机器人结构优点
3.1 总体优点
新型水下负压-电磁吸附清洗机器人无须让船舶进入船坞,提高了船舶的利用率,大量节省了入坞的清洁费用,避免了传统清刷技术而导致的二次污染问题;克服了水下人工清刷速度慢、劳动强度大和安全系数低等问题[11];采用了四条独立的运动机构控制电磁吸附块运动,能根据船舶表面的实际形状进行调节,从而使得机器人能更有效地贴合在船体表面,不易脱落。
3.2 突出优点
1)通孔一的存在很大程度上减轻了机器人的自重,减小了机器人吸附所需的力量。
2)空化射流喷头设置在机器人基板的一侧,可以避免吸附结构吸附到船舶表面的海洋生物上而导致机器人脱落。
3)电磁吸附块的底部可以添加一层柔性层,使得电磁吸附块能够与船体外表面更加贴合。
4)柔性圈呈喇叭状更有利于和船体表面的贴合,从而保证抽气管内部负压环境更稳定。
4 结语
在未来很长一段时间,船舶水下清洗作业还有很长一段路需要走。利用新型水下负压-电磁吸附清洗机器人,能够较为高效、智能地完成船体表面的清理工作,机器人还可以根据不同船型的不同表面进行调整,以达到更契合船体表面的目的。除此之外,新型水下负压-电磁吸附清洗机器人还可以应用到其他海上建筑的清洁中,比如跨海大桥、近海防护工程、海上灯塔等大型工程建筑,研究发展前景非常广阔。
猜你喜欢
舰船科学技术(2022年21期)2022-12-12
舰船科学技术(2022年20期)2022-11-28
舰船科学技术(2022年11期)2022-07-15
电子产品可靠性与环境试验(2022年2期)2022-05-14
科学技术创新(2021年34期)2021-12-14
科学技术创新(2021年22期)2021-08-16
科学导报(2019年55期)2019-09-28
船舶标准化工程师(2019年4期)2019-07-24
安徽化工(2018年6期)2019-01-11
北京汽车(2018年4期)2018-09-08