
皮米量级微位移信号处理分辨力的光纤布拉格光栅探针系统
2022-04-27 14:40刘芳芳杨子涵焦宇辉李红莉夏豪杰
光学精密工程 2022年7期
刘芳芳,杨子涵,焦宇辉,李红莉,夏豪杰
(合肥工业大学仪器科学与光电工程学院测量理论与精密仪器安徽省重点实验室,安徽 合肥230009)
1 引 言
随着微器件、微界面、生物医学等技术的发展,微纳测试技术应具备更高的、乃至纳米量级的分辨力,以提供微尺寸特征的检测基础和质量保障[1-3]。小型三坐标测量机及各类探针测量系统是高精度微纳测量领域的核心。这些设备通常具有微纳米量级特征尺寸的探针尖端、以及高灵敏度的敏感元件,以提高灵敏度和扩大适用范围[4-6]。然而,灵敏度增加的同时,噪声对系统的影响也必然加剧,因此,在微纳测试系统中,对噪声抑制、提高信噪比水平(Signal-to-Noise Ratio,SNR)的研究才是提高微纳测试系统分辨力的关键。
在微纳测量中,测量信号常以极微弱信号的形式存在,伴随极低的信噪比水平,且存在时效性、准确性限制,无法被有效检测和分析[7]。根据信号特征信息及系统响应特性,常用的检测分析方法有相关检测、频域检测、小波变换和随机共振等[8-12]。其中,频域检测、小波变换和随机共振这些方法常常作为信号的后处理手段,不能实现信号的实时测量与处理。以锁相放大技术为核心的相关检测,常用于在噪声环境中检测极微弱信号,在光学、通信等研究领域得到了广泛的应用[13-15]。该技术利用测量信号的频率特性检测其幅值,即要求测量信号具有动态特性,故较少应用于检测静态或准静态微弱测量信号。
本文设计并制造了一个基于光纤布拉格光栅(Fiber Bragg Grating,FBG)传感原理的高灵敏度探针系统,并研究了静态锁相放大技术(Static Phase-locked Amplification Technology,SPLAT),用于检测小于纳米量级的微位移信号。该系统对纳米量级微位移进行准静态测量,测量信号表现为静态或准静态微弱信号(μV级)。实验结果表明,采用FBG高灵敏度探针系统并结合静态锁相放大技术对微位移信号进行测量,可使系统的微位移信号处理分辨力达到皮米量级,且该系统具有抗干扰能力强、重复性好及成本较低等优点。
2 系统原理及组成
2.1 光纤布拉格光栅传感原理
FBG是一种新型无源光学传感器,具有尺寸小、灵敏度高、线性测量范围大和抗电磁干扰等优点,是微纳测量领域的优秀传感器件[16-17]。
由宽带光源发射的光进入FBG,符合其中心波长的窄带光谱部分被反射回来,其余部分被透射出去。FBG的中心波长λ是光栅折射率neff和光栅周期Λ的函数,可表示为[18]:

随着FBG的应变和温度的变化,光栅周期Λ和有效折射率neff会发生改变,其中心波长λ产生了漂移。通过解调中心波长的漂移量Δλ即可实现测量。由应变和温度引起的中心波长的漂移可以表示为[18]:
2.2 高分辨力位移测量系统结构
基于FBG传感原理的高灵敏度探针及信号处理系统如图1所示。探针模块主要由测量FBG和解调FBG构成,测量FBG感测微位移,解调FBG实现测量FBG中心波长漂移量的解调。基于电弧放电和表面张力原理在测量FBG端部制成微球,并垂直伸出感测微位移,实现探针测杆及尖端一体化。探针尖端微球直径为186.5μm,中心偏移量为1.3μm,圆度误差为3.8μm。FBG使用单模SMF-28光纤载氢后刻写,测量FBG和解调FBG的中心波长分别为1 549.949,1 549.963 nm,3 d B带 宽 分 别 为0.134,0.132 nm,反射率≥90%,边带抑制比大于15 d B,栅区长度为15 mm。
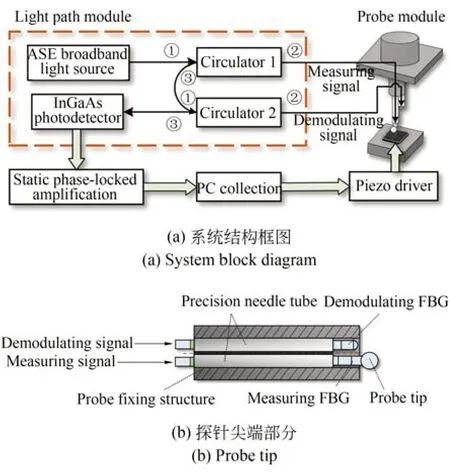
图1 微位移测量系统结构Fig.1 Schematic diagram of micro-displacement measurement system
光路模块中包含ASE宽带光源(ZASE-1550-20-2-M,MINXIN,China)、环形器、具有温度自补偿的InGaAs光电探测器(PD-M-APDLW-050,OPEAK,China)及两根FBG传感器。其中,ASE宽带光源的输出稳定性为0.2 dB。从光源发出的光经环形器1进入测量FBG中,满足测量FBG中心波长条件的光被反射后经环形器1、环形器2进入解调FBG。最后,满足解调FBG中心波长条件的光被反射并进入In-GaAs光电探测器中。因此,InGaAs光电探测器接收到的光能与两根FBG反射光谱的重叠面积成正比。
在FBG微位移测量系统中,设计双光栅自补偿解调方法,以削弱环境温度对探针系统的影响。如图2(a)所示,两根FBG分别用精密不锈钢针管封装并固定于同一结构内,可视为处于同一温度场中,保证了测杆的直线度。在测量过程中,测杆拉伸(正向应变εx>0)及温度升高(ΔT>0)会导致FBG中心波长正向漂移Δλ>0,而测杆压缩(反向应变εx<0)及温度降低(ΔT<0)则会导致中心波长反向漂移,Δλ<0。在初始状态下,测杆长度保持不变;微位移测量时,测杆压缩。
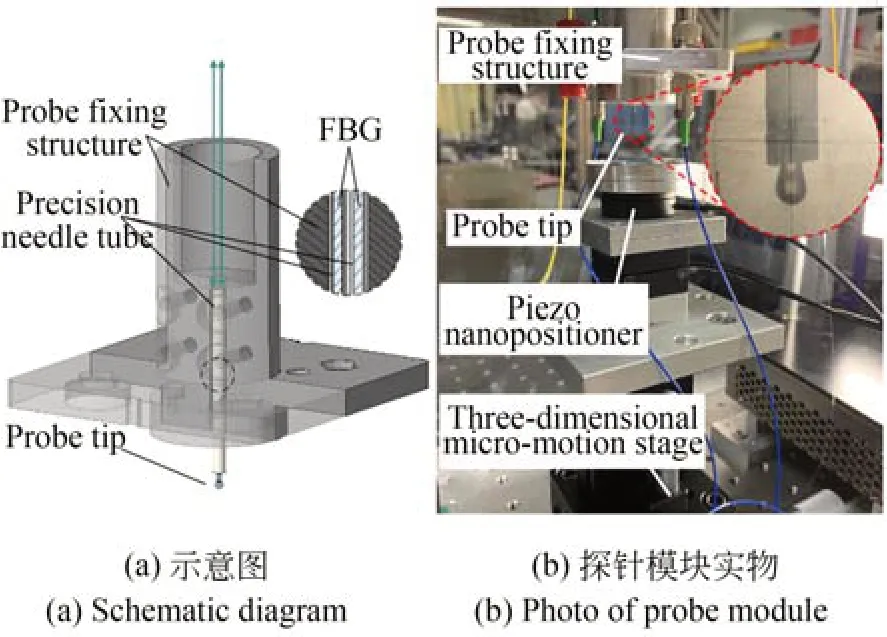
图2 FBG系统前端探针模块Fig.2 FBG probe module
图3为双光栅自补偿方法光谱关系原理。在初始状态下,当环境温度不改变时(ΔT=0),由于两FBG参数一致性极好,其光谱重叠面积A0最大,即探测器接收的光能P最大(如图3(a)所示)。图3(b)中,在微位移测量时(ΔT=0,εx<0),测量FBG的中心波长λM漂移了Δλx,解调FBG的中心波长λD保持不变,则波长差为Δλx+λ0,故两FBG反射谱交错,光谱重叠面积A1<A0,探测器接收的光能对应减小。因此,通过光能变化可以获得测量FBG波长漂移量ΔλM,解调该漂移量从而实现了微位移测量。随着环境温度的改变(如:ΔT>0),处于同一温度场中的两根FBG会产生近似同向等大的中心波长漂移ΔλT,故其反射光谱的重叠面积近似保持不变(A2=A0),如图3(c)所示。在实际微位移测量过程 中(如:ΔT>0,εx<0),测 量FBG及 解 调FBG的中心波长漂移量分别为ΔλT+Δλx,ΔλT,波长差仍为Δλx+λ0,光谱重叠面积A3=A1,即探针系统在对微位移进行测量的同时,实现了低成本、可靠性高的温度误差自补偿。
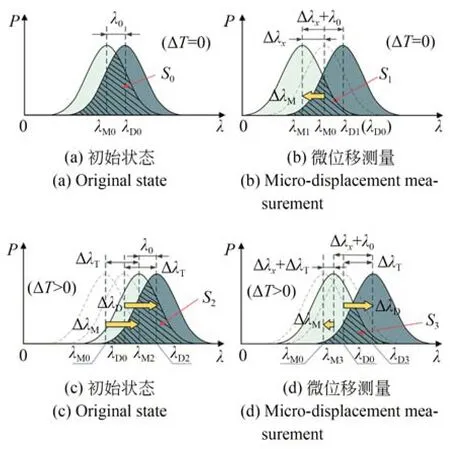
图3 双光栅自补偿方法原理Fig.3 Schematic diagram of double grating self-compensation method
传感与解调FBG参数配比及解调、探针机构的物理结构和静态锁相放大模块等设计有效保障了探针系统的高灵敏度。首先,FBG传感解调的高灵敏性与测量及解调FBG的高一致性、FBG传感器的小带宽、高反射率,及短的栅区长度密切相关。所选的两个FBG中心波长差仅为0.014 nm,3 d B带宽极窄为0.100 nm左右,测量FBG中心波长偏移量处于3 d B带宽内,且反射率较高均≥90%,边带抑制比>15 d B,故当测量FBG的中心波长产生一微小的漂移量时,光电探测器的接收光能会显著变化,则输出信号对被测量响应极为灵敏。在结构上,光栅长度较短为15 nm,且探针测杆及尖端为一体化结构(尖端位于测杆栅区端部),不存在机械传动部件,微位移产生的应变基本都作用到栅区。其次,实际有效的双光栅自补偿结构提高了系统稳定性。最后,重点研究了静态锁相放大技术对信号进行高信噪比检测处理,显著提升了系统的灵敏度。因此,通过上述综合设计显著提高了探针系统的探测灵敏度和可靠性。
微位移模块由三维精密微动台和压电纳米定位器组成,实现微纳米级的位移控制。压电纳米定位器(S-303,Physik Instrumente,Germany)的闭环行程为2μm,闭环位移分辨力为0.03 nm,重复定位精度为0.7 nm,典型线性值为1 nm。压电纳米定位器上设置被测样品,并一同置于三维精密微动台之上(如图2(b)所示)。
2.3 静态锁相放大技术
锁相放大技术对微弱信号具有高信噪比放大特性,常用于处理动态测量信号。文献[19]设计了一种数字锁相放大器以提高动态范围,重点研究了采样频率与相关运算结果的关系。文献[20]进行了双相位锁相放大器设计,无需对参考信号进行相位调整即可实现对待测信号的鉴幅功能。上述锁相放大器均用于检测动态信号,然而,在微纳测量系统中,很多测量信号表现为静态或准静态信号形式,不具有频率、相位等周期动态特性,不能使用传统锁相放大技术直接检测;同时,静态或准静态微弱信号相比于动态信号稳定性较差,更易受漂移等影响,输出信号精度难以保证。因此,需研究用于微纳测试系统输出的静态信号的锁相放大技术。通过该技术可显著降低信号通道噪声,从噪声环境中检测、处理静态微弱信号,并放大到有效量级,从而提高系统灵敏度并改善信噪比,进而提高微纳测试系统的微位移分辨力。
图4所示为静态锁相放大结构。电路输入信号源为InGaAs光电探测器(均方根噪声为0.9 mV,无光偏置噪声为±2 mV),及稳压基准源(GPP-4323,GWINSTEK,China),纹 波≤0.350 mVrms,噪声≤2 mVpp。

图4 静态锁相放大技术结构Fig.4 Structure of static phase-locked amplification technology(SPLAT)
由于静态微弱测量信号不具备频率、相位等高频谐振信息,故需要对测量信号进行一系列预处理,将准静态信号尽可能不失真地移出低频区,并使其特征信息加载到高频段,才能适用于锁相放大技术。
静态信号预处理环节包括去偏置模块、前置低通模块和调制模块。去偏置模块消除了测量信号初始偏置电压并确定系统初始零位,以避免后级运放饱和;选用输入阻抗极高及失调漂移极低(0.25μV/℃)的三运放芯片INA 114减小了信号损耗。前置低通模块的截止频率为10 Hz,在50 Hz处的频率响应为-40 dB,可有效滤除工频、高频噪声。该模块选用TLC2652,具有极低的输入失调电压(0.5μV)及失调漂移(3 nV/℃)。在AD835中准静态微弱测量信号会与频率为1 kHz、幅值为1 V、初始相位为0°的正弦载波信号相乘完成调制,该芯片具有极高的压摆率(1 000 V/μs)及低乘法器噪声,确保了信号转换的快速性及准确性。经上述预处理,静态微弱测量信号具备了可供锁相放大环节识别的频率、相位特征信息,且保证了信号的准确性。
在锁相放大环节中对上述预处理模块处理后的输入信号进行了同步选频检测和放大,且避免引入新的误差。锁相放大环节主要包括信号通道、参考通道、相敏检测器和低通滤波器等。在信号通道上,采用了多级滤波与放大模块级联的方案,以消除前级运放产生的输出失调电压及偏移引入的低频误差且避免电路饱和。放大模块基于轨到轨输入/输出特性的ADA 4084设计;锁相放大环节中的滤波器均选用失调漂移较小的ADA 4077(失调电压为10μV,失调电压偏移为0.25μV/℃)。信号经放大后进入中心频率为1 k Hz,通带20 Hz的带通滤波器,有效滤除其他频段的噪声干扰,实现高Q值的同步选频输出。由于信号在多级滤波后初始相位发生改变,故将高频参考信号进行移相,在相敏检测器(AD630)中与测量信号相乘实现解调并鉴相输出。后置低通滤波器的截止频率为0.8 Hz,能够从高频信号中有效还原测量信号且进一步减小噪声频带。最后,信号经差分后通过屏蔽双绞线将信号传输至信号采集卡(USB-6210,NI,USA),并在上位机处理显示。
为测试静态锁相放大技术对静态微弱信号的检测处理能力,在3.2节实验中对信噪比进行了评定,可获得约为3 000倍的信噪改善比(Signal-to-noise Improvement Ratio,SNIR)[21]。因此,通过上述静态信号预处理环节、具有同步选频特性的锁相放大环节、高精度器件选型、及高灵敏度低噪声电路设计等方案的综合运用,静态微弱测量信号得到了有效的实时检测和放大,极大地改善了信号输出的信噪比,准确度高且成本较低。
根据系统噪声与灵敏度测试实验、以及微位移分辨力测试结果(见3.2节),该系统可实现在噪声干扰环境下检测约3μV大小(对应约60 pm微位移)的微弱静态测量信号。
3 实验及结果讨论
3.1 双光栅自补偿结构性能测试
在FBG微位移测量系统中,双光栅一体化探针设计可有效实现对共模干扰的自补偿。由于静态锁相放大模块中包含滤波等信号处理,不能明显监测共模干扰引起的噪声电平和信号漂移的变化,因此直接采集光电探测器的输出信号进行实验测试,对比了双光栅一体化探针和普通单光栅探针对共模干扰(温度、气流)的输出情况。两种探针均用同一套FBG进行测试,其中,测量FBG的中心波长为1 549.944 nm,3 d B带宽为0.115 nm,解调FBG的中心波长为1 549.969 nm,3 dB带宽为0.113 nm。
首先,将双FBG探针放入恒温水浴箱中进行温度扰动实验,水浴的温度控制精度为±0.1℃。图5(a)为双FBG探针温度漂移测试结果。当水浴温度从15℃变为20℃时,光电探测器的输出信号均值分别为-0.433 V和-0.428 V,测量标准差分别为2.29 mV和2.70 mV,输出电压随温度漂移了5.35 mV。图5(b)为单FBG探针温度漂移测试结果,当水浴温度发生变化时输出信号产生明显漂移。在15℃和20℃下,输出信号均值分别为-0.442 V和-0.242 V,标准差分别为3.45 mV和5.59 mV,输出信号随温度漂移了199.19 mV。故当环境温度变化5℃时,普通单光栅探针系统的温漂极大地影响了系统的测量精度,而双光栅结构探针的温漂误差约为单光栅探针温漂的1/40,因此该结构对于环境温度变化造成的误差具有较强的自补偿能力,有效保障了探针系统的长期工作稳定性,且结构简单、成本较低。实验在恒温条件下进行,短期温度波动为±0.1℃,故在实际微位移测量中,实验数据的准确性得到了充分的保障。
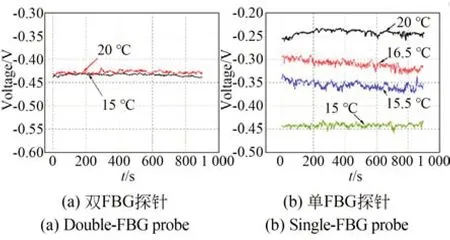
图5 温度扰动实验结果Fig.5 T emperature disturbance test results
气流扰动实验结果如图6所示(彩图见期刊电子版)。区域1和区域3无气流干扰,仅在区域2的时间段内加载气流干扰。橙色曲线为不受任何气流干扰的参考对照曲线,其均值和标准差分别为-0.469 V和4.49 mV。区域2中双FBG探针实验曲线(蓝色曲线)的均值和标准差分别为-0.469 V和3.23 mV,单FBG探针(黑色曲线)的均值和标准差分别为-0.456 V和7.31 mV。由此表明,当受到气流干扰时,双FBG一体化探针的输出信号的偏移及噪声波动明显更小。因此,双FBG探针结构对环境温度、气流等的共模干扰具有良好的鲁棒性。
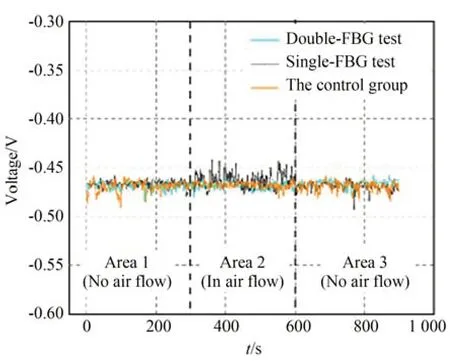
图6 气流扰动实验结果Fig.6 Airflow disturbance test results
3.2 微位移分辨力测试
在探针工作期间对探针机构进行了实时温湿度监测,温湿度传感器的温度精度为±0.1℃,湿度精度为±1.5%RH。实验在恒温实验室进行,探针模块位于密封箱体中,箱体内放置了分子筛干燥剂控湿,因此,实验室湿度、气流波动等环境因素对系统的影响均较小。实验温度为(23.0±0.1)℃,湿度为(55±1)%RH。
为测试FBG探针系统的微位移灵敏度及分辨力,压电纳米定位器提供纳米量级运动控制精度的微位移作用于探针尖端,其微位移步距设置为10 nm。在单次测量中,每个位移点采样500个数据,取均值作为该位移点下的测量数据,在一个完整的全量程测量过程中可获得若干位移测量点,并重复进行5组以上全量程测量以获得重复性实验数据。
在实验中,采用刚度较大的高反射镜面作为被测样品,它在接触区间产生的弹性变形相比于FBG一体化探针测杆的弹性形变可忽略不计,使得压电纳米定位器的位移输出量完全作用到探针测杆,即测量FBG的中心波长感测微轴向应变发生漂移,解调该漂移量可实现微位移测量。
图7(a)和7(d)分别为原始测量信号和经静态锁相放大处理后的测量信号的全量程实验数据,两组数据为同步采样结果。当初始零位在0 V时,探针系统在接触区域内的有效测量范围约为1μm,超过该量程后输出数据达到饱和,满量程输出范围分别为23.36 mV和10.437 V,表明测量信号经静态锁相放大处理后,微弱测量信号可以放大到有效量级,系统的微位移响应灵敏度有极大的提升。5次重复性实验的最大重复性误差区域的局部放大图如图7(b)和7(e)所示,在该区域中压电纳米定位器的输出位移对应图7(a)和7(d)中500~700 nm的橙色区域,最大重复性极差分别为0.85 mV和470.90 mV。
接触区域测量数据均值的灵敏度拟合曲线如图7(c)和7(f)所示,灵敏度曲线的斜率分别为-3.38×10-2mV/nm和-15.33 mV/nm;非 线性误差分别为4.8%和5.8%。
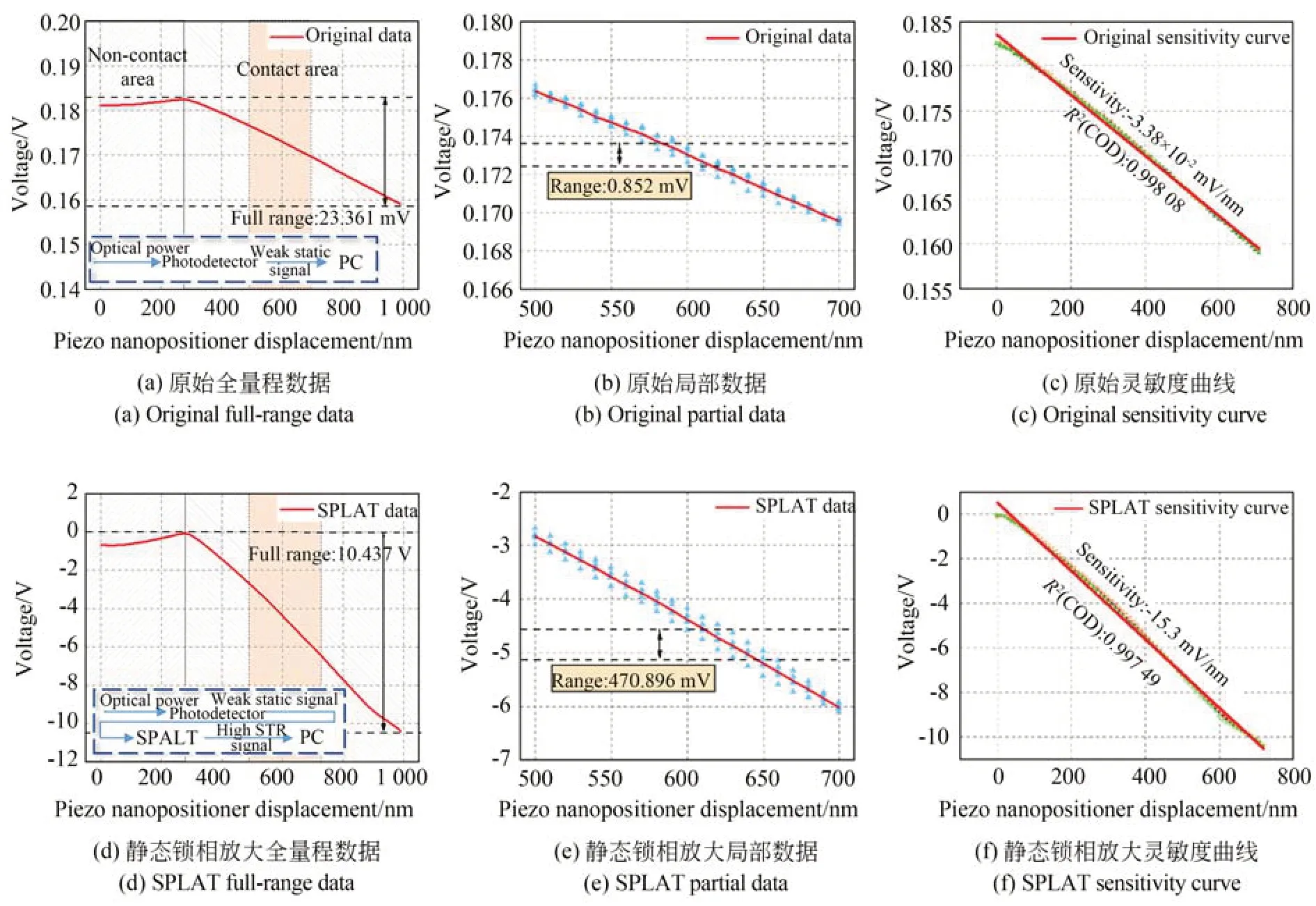
图7 微位移测量实验结果Fig.7 Micro-displacement measurement experiment results
图8(a)为原始测量信号的重复性标准差σ。图8(b)为静态锁相放大处理后的测量信号的归一化重复性标准差σnor,归一化处理为测量信号重复性标准差除以锁相放大倍数。图中,最大重复性标准差分别为0.31,0.36 mV,差值仅为0.05 mV,呈现良好的一致分布,说明两组重复性数据具有较高的一致性,也表明了静态锁相放大模块对系统整体重复性误差的影响较小,系统重复性误差源主要集中在前端探针模块和光路模块中。
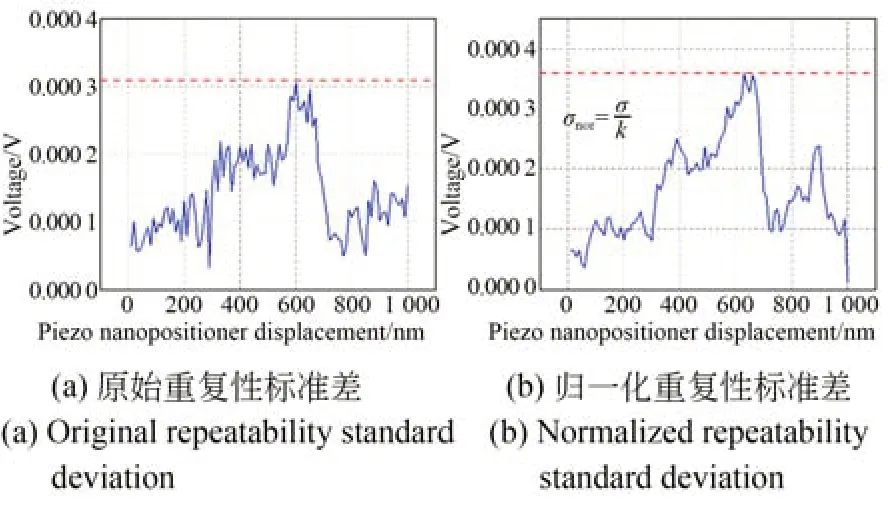
图8 测量信号重复性标准差Fig.8 Repeatability standard deviation of measured signals
系统微位移分辨力R可通过对噪声N和灵敏度S进行信号处理获得,可表示为:

式中:噪声N采用噪声极差Nrange表示,噪声极差Nrange为某短期采样时间内采样点的瞬时值X i间的极差,即表征了短期噪声的变动范围。为测试噪声极差Nrange,在一小时内任意采集5组短期噪声数据(每组1 s采集时间),取5组的均值、标准差来评定系统的噪声极差。系统原始信号及经过静态锁相放大技术处理后信号的5组噪声重复性数据如表1所示。其中,第1组的原始噪声及经处理后的噪声数据曲线如图9所示。经数据处理,原始测量信号噪声极差的均值为7.56 mV,标准差为1.90 mV,结合原始灵敏度实验结果(-3.38×10-2mV/nm,如图7(c)所示)以及式(3),可获得对应的探针系统的原始微位移信号处理分辨力为223.67 nm,标准差为56.21 nm;经静态锁相放大技术处理后的测量信号噪声极差的均值为0.83 mV,标准差为0.32 mV,结合处理后的灵敏度实验结果(-15.33 mV/nm,如图7(f)所示)以及式(3),可获得对应的探针系统改进后的微位移信号处理分辨力约为0.06 nm(小于60 pm),标准差为0.02 nm(20 pm)。
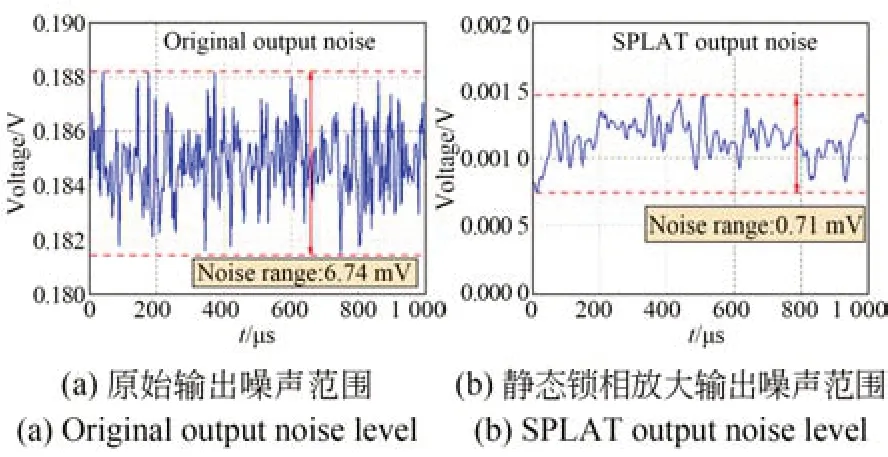
图9 短期噪声实验Fig.9 Short term noise experiment
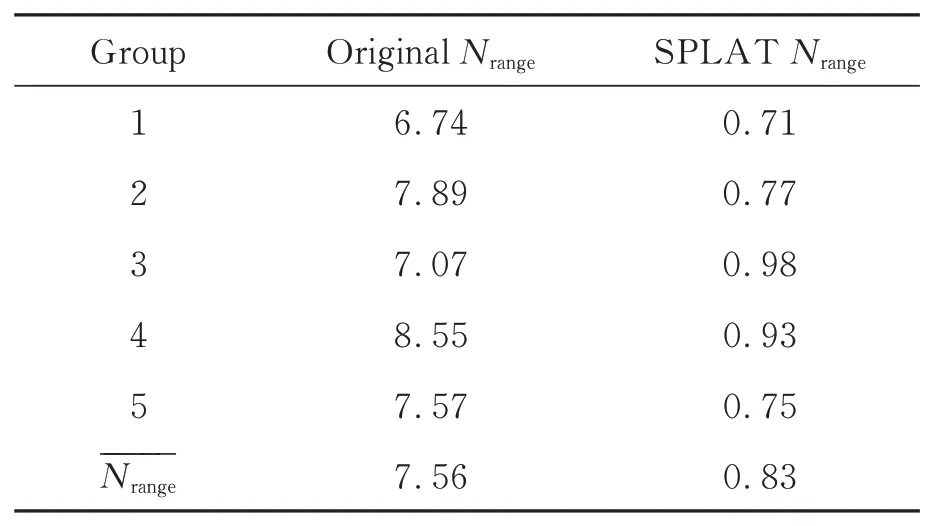
表1 系统噪声极差重复性测试数据Tab.1 Repeatable test data for system noise range(mV)
由于系统的信噪比通常是采用噪声水平Nrms进行评定。噪声水平Nrms定义为瞬时测量信号减去测量信号有效值Xrms后的有效值,可表示为[22]:

式中:P是采样周期内的采样点数;测量信号有效值Xrms为[22]:

通过上面5组噪声测试数据可获得噪声水平的均值,数据如表2所示。经数据处理,原始测量信号的噪声水平为1.89 mVrms,信噪比为38.50 dB(对应图7(a)中最大量程处输出数据为159.11 mVrms);经静态锁相放大技术处理后的测量信号的噪声水平为0.18 mVrms,信噪比为95.23 dB(对应图7(d)中最大量程处输出数据为-10.394 Vrms)。
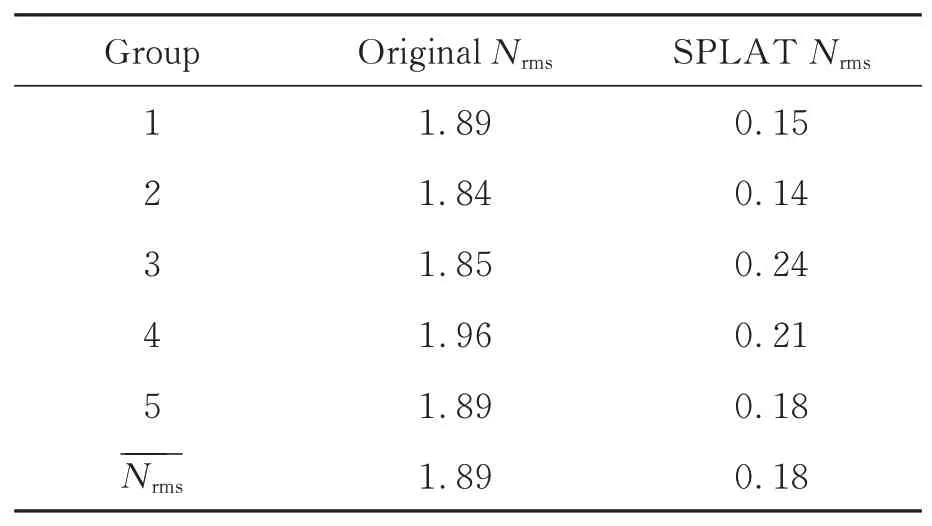
表2 系统噪声有效值重复性测试数据Tab.2 Repeatable test data for system noise level(mV)
通过上述测试结果可知,系统微位移信号处理分辨力和信噪比提高了约3 000倍,据目前可获悉的FBG传感测量技术而言,首次达到了皮米量级的微位移分辨力。因此,对静态微弱测量信号进行改进的锁相放大技术处理,极大地增加了测量信号的信噪比水平,探针系统的微位移信号处理分辨力也得到了极大的提高。
由于系统灵敏度及噪声作为影响信号处理分辨力的关键指标,讨论其影响因素是必要的。双FBG的参数配比及解调设计,探针机构的物理结构,静态锁相放大模块信噪比设计等决定了系统的灵敏度。系统噪声则可从多方面进行分析评定:对于探针前端模块,由于FBG对环境参量极为敏感,故超低频气流扰动、大地震动均能够产生噪声;在光路模块中,ASE宽带光源光功率不稳定,以及InGaAs光电探测器输出噪声和温漂等低频干扰也会一定程度上与信号一同被转移至锁相放大的相干频段,无法彻底去除,这是限制进一步提高系统信噪比的主要原因。另外,数据采集卡存在着采样绝对精度,限制了各测量指标的有效位数,电路模块中稳压基准源也存在较小量级的低频噪声与漂移。由于探针测杆与压电纳米定位器间存在一定的垂直度误差,测杆会产生水平分量从而降低系统灵敏度。以上因素均会引入不同量级的测量误差,限制了系统微位移信号处理分辨力的提高,影响探针系统的测量精度。
5 结 论
为实现超高分辨力的微位移测量,本文基于FBG传感原理设计了高灵敏度探针系统,介绍了其测量工作原理和系统结构,改进了现有的锁相放大技术,提出了静态锁相放大技术,用于检测小于纳米量级的准静态微位移信号,并详细介绍了设计构架和实验方法。实验结果表明,通过高灵敏度探针机构系统和静态锁相放大技术对微弱测量信号的处理,探针系统在接触区域的微位移 测 量 范 围 约 为 1μm,灵 敏 度 为-15.33 mV/nm,短期噪声极差的均值为0.83 mV,标准差为0.32 mV,信号处理分辨力约为0.06 nm(60 pm),标准差为0.02 nm(20 pm),可实现皮米量级的微位移分辨力。本研究拓宽了FBG传感器件的应用途径,增大了锁相放大原理的适用范围,为它们在微纳测量及微结构等领域的应用提供了更广阔的思路。
猜你喜欢
红外技术(2022年4期)2022-04-25
河北大学学报(自然科学版)(2021年5期)2021-10-22
装备制造技术(2020年1期)2020-12-25
中国医学装备(2020年4期)2020-05-23
中国医学装备(2019年1期)2019-02-14
通信电源技术(2018年5期)2018-08-23
现代商贸工业(2017年11期)2017-05-25
中国光学(2015年5期)2015-12-09
中国与非洲(法文版)(2015年4期)2015-11-09
空间控制技术与应用(2015年3期)2015-06-05
