
矢量原子磁力仪中旋转磁场产生装置的研制
2022-04-27 14:40:34陈大勇史彦超崔敬忠刘志栋缪培贤
光学精密工程 2022年7期
陈大勇,史彦超,崔敬忠,刘志栋,缪培贤
(兰州空间技术物理研究所 真空技术与物理重点实验室,甘肃 兰州730000)
1 引 言
地磁场是矢量场,用于地磁场测量的磁传感器主要有磁通门磁力仪、质子磁力仪、磁阻磁力仪、霍尔磁力仪和原子磁力仪等[1]。近年来,原子磁力仪得到了迅猛的发展,Mz和Mx光泵磁力仪、CPT(相干布居囚禁磁力仪)原子磁力仪、非线性磁光旋转磁力仪、无自旋交换弛豫[2]等原子磁力仪[3]相继问世。原子磁力仪的灵敏度高[4-6],但绝大多数都是标量磁力仪。目前,广泛使用三轴磁通门测量矢量磁场,但其固有误差较大[7]。2018年,董海峰等综述了国际上三轴矢量原子磁力仪的研制情况[8],按工作原理可分为磁场扫描法[9]、磁场旋转调制法[10]、磁场轮流抵消法[11]、磁场投影法[12]、磁场交叉调制法[13]、磁场分立调制法[14]和自旋进动调制法[15]。其中,磁场旋转调制法可实现磁场连续测量,该技术方案是2004年由俄罗斯Alexandrov等学者提出的,方案中使用快速响应Mx钾光泵原子磁力仪作为磁传感器,存在测量盲区较大的问题[10]。2006年,俄罗斯Vershovskii等学者提出了基于Mx铯光泵原子磁力仪的改进型方案,降低了系统测量误差[16],标量原子磁力仪决定了基于旋转磁场调制法矢量原子磁力仪的性能。2017年,兰州空间技术物理研究所报道的抽运-检测型铷原子磁力仪具有测量量程宽、磁场采样率高、盲区小等优势[17-18]。利用抽运-检测型原子磁力仪和磁场旋转调制法有望实现高性能的矢量原子磁力仪,在该矢量原子磁力仪中旋转磁场是性能指标重要的影响因素[8,10,16]。
现阶段公开报道的文献局限于旋转磁场激励下相关物理现象以及应用的研究,而对高性能旋转磁场产生技术以及系统组成和电子学技术未有详细的报道[19-20]。为了研制基于磁场旋转调制法的矢量原子磁力仪,高性能旋转磁场产生技术是必须解决的关键技术。本文提出了一种高性能旋转磁场产生装置,可对旋转磁场强度、旋转方向和轨迹进行精密调整和控制,使旋转磁场满足矢量原子磁力仪的应用需求。
2 矢量原子磁力仪
2.1 工作原理
基于旋转磁场调制法的矢量原子磁力仪工作原理如图1所示。图1(a)中,旋转磁场B⊥在x-y平面内绕着z轴旋转,待测磁场B与z轴平行。由Btot=B+B⊥可知,总磁场Btot的方向会变化,但强度不会发生变化,抽运-检测型原子磁力仪测得恒定磁场。图1(b)中,B与z轴有α角度,抽运-检测型原子磁力仪测得的磁场Btot呈周期性变化,测量得到的最大值Bmax和最小值Bmin分别为:
极大值与极小值的差值为:

图1(c)中,x轴和y轴设置的补偿线圈产生补偿磁场ΔB,使ΔB与B的矢量和平行于z轴,则抽运-检测型原子磁力仪测得没有旋转磁场调制的恒定磁场。以ΔBtot幅度作为判定条件,通过不断调整x轴和y轴补偿线圈产生的补偿磁场,使ΔBtot幅度逐渐减小,当ΔBtot≤5 nT时,矢量原子磁力仪实现了跟踪锁定。通过对x轴和y轴补偿线圈的磁场分量Bx和B y进行反演计算,即可获得待测磁场的方向信息。
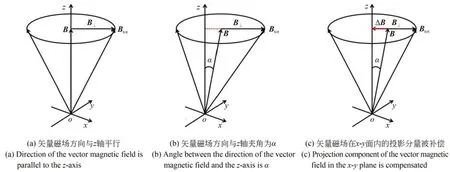
图1 基于旋转磁场调制法的矢量原子磁力仪工作原理Fig.1 Principle diagram of vector atomic magnetometer based on rotating magnetic field modulation method
2.2 矢量原子磁力仪组成
图2是基于磁场旋转调制法和抽运-检测型原子磁力仪的矢量原子磁力仪的实验系统框图。它包括抽运-检测型原子磁力仪、旋转磁场产生装置、补偿磁场线圈以及磁屏蔽筒。抽运-检测型原子磁力仪中待测磁场与z轴平行或反平行;795 nm圆偏振抽运光使87Rb原子磁矩与z轴平行或反平行;抽运光关闭后,用特定时长角频率(约等于拉莫尔进动频率)激励磁场驱动87Rb原子磁矩进动至与待测磁场垂直的平面内;红失谐6 GHz的线偏振探测光穿过铷泡,通过差分探测可获得87Rb原子的拉莫尔进动频率信号,对该信号进行傅里叶变换获得待测磁场的强度,其详细工作原理可参考文献[16]。这里需要指出的是,抽运-检测型原子磁力仪的测量盲区包括x轴方向、待测磁场与x-y面内夹角小于10°的区域[17];矢量原子磁力仪中旋转磁场是将相位差为90°的两组正弦信号通入x轴和y轴方形亥姆霍兹线圈,则线圈所包围空间中心会产生相应的旋转磁场,其工作频率是依据抽运-检测型原子磁力仪测量带宽确定的;x轴和y轴的补偿线圈产生补偿磁场。

图2 矢量原子磁力仪实验系统框图Fig.2 Block diagram of vector atomic magnetometer experimental system
2.3 旋转磁场技术要求
矢量原子磁力仪的磁场方向测量精度与待测磁场强度和旋转磁场强度息息相关,可通过式(3)和锁定判据分析和讨论旋转磁场的技术指标。由于抽运-检测型原子磁力仪磁场的采样率 最 高 为1 000 Hz、测 量 带 宽 为20 Hz[16],则 旋转磁场的工作频率为20 Hz。
首先分析旋转磁场强度对测量精度的影响。当待测磁场B为50 000 nT、与z轴夹角α为30°时,Btot极值以及极值间差值ΔBtot随旋转磁场的变化曲线如图3所示。随着旋转磁场强度的增加,Btot的极大值呈线性增加、极小值线性减小、差值ΔBtot显著增加,说明增加旋转磁场强度,矢量原子磁力仪的测量精度会显著提高。
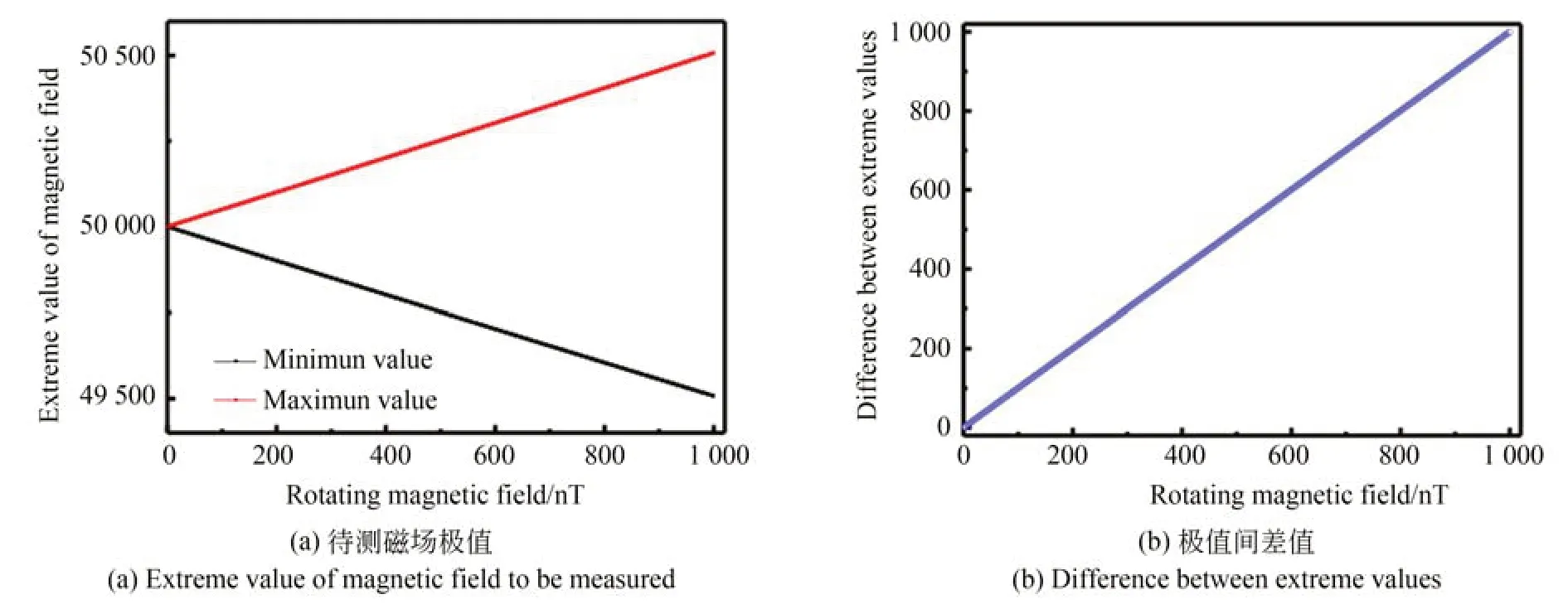
图3 旋转磁场对待测磁场影响的仿真分析Fig.3 Simulation analysis of influence of rotating magnetic field on measured magnetic field
当待测磁场为50 000 nT、矢量原子磁力仪对磁场方向的测量精度为1°时,基于式(3)和锁定判据可得旋转磁场的最小强度。经计算,旋转磁场强度最小为30 nT。实验中,考虑到电子线路特性以及测量精度的需求,旋转磁场强度为500 nT。
旋转磁场的频率为20 Hz、强度为500 nT时,x轴和y轴方形亥姆霍兹线圈产生的旋转磁场可以表示为[21-22]:

式中:2l是正方形亥姆霍兹线圈边长,N是线圈匝数;ω是正弦信号角频率,Δφ是相位相差,Ix0和Iy0是x轴和y轴线圈工作电流的幅值;i,k表示矢量方向。
当Δφ=90°,By0=Bx0时,旋转磁场轨迹在x-y平面内是圆形,不会对矢量原子磁力仪的测量产生影响。然而,通常情况下Δφ≠90°,Bx0≠By0,旋转磁场模将周期性变化,x-y平面内旋转轨迹为椭圆,此时测量磁场值Btot会出现极大值与极小值,该波动为矢量原子磁力仪的测量误差,可以表示为:

当B为50 000 nT,旋转磁场设计值为500 nT。假设极值间波动差完全由旋转磁场引起,当ΔBtot为1 nT时,旋转磁场强度波动约为90 nT。则得出若旋转磁场强度波动小于9 nT,引起的测量误差小于0.1 nT,由锁定判据得出此时旋转磁场波动对测量结果的影响可以忽略。由式(4)可以看出,通过控制Δφ,Bx0和By0,可以实现对旋转磁场强度、旋转方向和轨迹的控制和调整,使旋转磁场满足矢量原子磁力仪的应用需求。

图4 旋转磁场产生装置Fig.4 Rotating magnetic field generator
3 旋转磁场产生装置设计
3.1 亥姆霍兹线圈
x轴和y轴的亥姆霍兹线圈采用正方形,边长34 cm、间距18 cm,可保证线圈包围空间中心40 mm范围内磁场的均匀性[22]。经Mx铯原子磁力仪标定,x轴和y轴线圈系数分别是41.486 91,38.497 86 nT/mA。经Chroma公司MODEL13350对线圈进行标定,20 Hz处x轴线圈的直流电阻为0.852 5Ω、电感为116.46μH,y轴线圈的直流电阻为0.880 8Ω、电感为141.05μH。
3.2 线圈驱动电路
线圈驱动电路中,DDS频率合成器、滤波及信号隔离电路构成相位可精密调控的正交信号源,用以精密控制正弦信号间相位差Δφ。电压放大电路、功率放大电路和电流调整模块构成功率控制电路。其中,电压放大电路控制功率放大电路输入信号,电流调整模块对线圈电流进行控制和调整。
3.2.1 正交信号源设计
正交信号源设计的核心是实现两路正弦信号相位差的精密控制和调整。相位差调控是在DDS相位同步[23]的基础上,通过相位字控制寄存器设置不同初始相位来实现相位差的控制和调整。如图5所示,DDS频率合成器方案包括微控制器MSP430F169;两DDS型号是AD9852;10 MHz有源晶振为系统时钟,技术指标中相位噪声为-53.57 dBc/Hz@1 Hz,-78.87 dBc/Hz@10 Hz,-108.57 dBc/Hz@100 Hz,-134.13 d Bc/Hz@1 k Hz,频 率 稳 定 度 为2.28×10-9@1 s,1.63×10-9@10 s。DDS相位同步设计包括硬件和软件两个方面。硬件设计中,10 MHz晶振到两AD9852的传输距离应相同,MSP430F169采用并口模式对AD9852寄存器进行设置。软件设计中,AD9852采用外部命令更新,MSP430F169发出的更新命令(UPDATE CLK)同时触发两AD9852,使两AD9852同时更新输出。当两AD9852频率字控制寄存器和相位字控制寄存器的设置值相同时,DDS频率合成器实现同频同相位输出。图6(a)是同频同相位输出测试结果,两正弦信号频率为20 Hz、相位差约为0.1°。

图5 DDS频率合成器技术方案Fig.5 Technical scheme of DDS frequency synthesizer
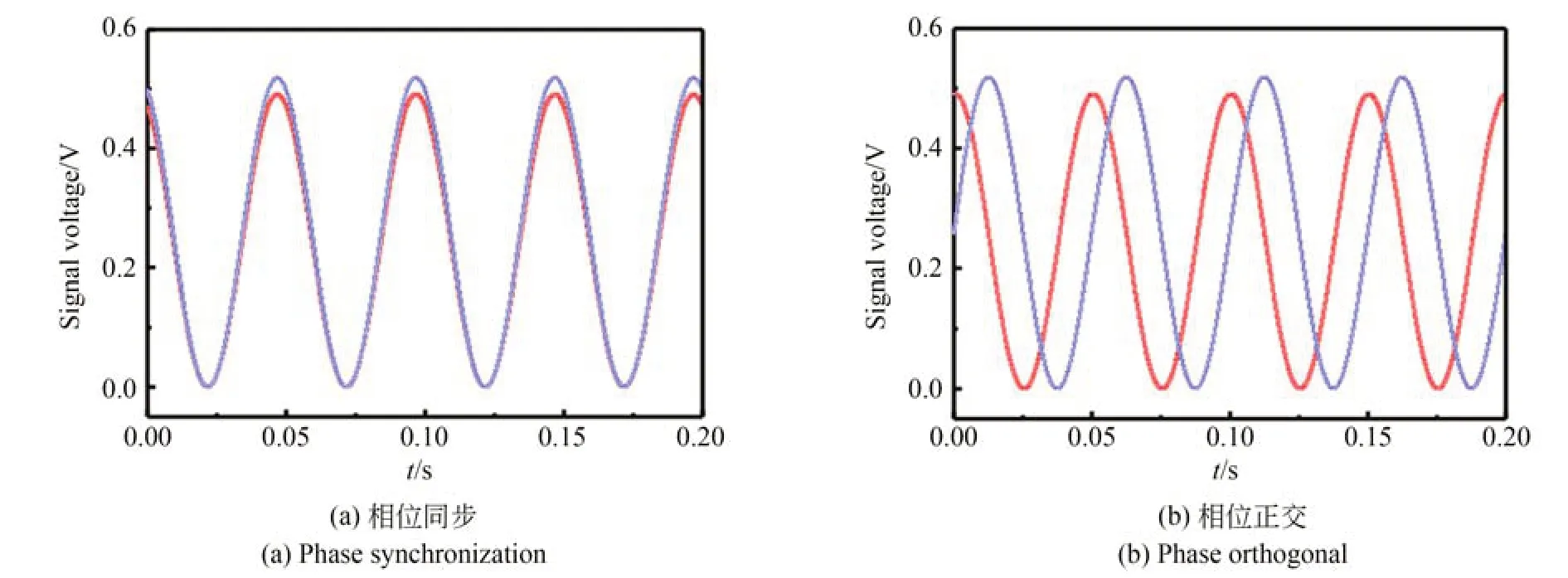
图6 AD9852相位测试Fig.6 AD9852 phase test
两AD9852设置不同相位初始值,可实现正弦信号相位差的精密调控。当DDS1相位控制字设置为0x0000,DDS2相位控制字为0x1000时,两路正弦信号的相位差为90°。图6(b)是两AD9852输出正弦信号的相位差为90°时的测试结果,两信号相位差为90.04°。AD9852相位字控制寄存器的位数为14,理论上相位差控制精度可达0.022°。相位差Δφ不会对矢量原子磁力仪测量产生影响,线圈驱动电路的设计重点是功率控制电路,以实现对旋转磁场强度的精密控制和调整。
3.2.2 功率控制电路
功率控制电路由电压放大电路、功率放大电路和电流调整模块构成。电压放大电路控制功率放大电路输入信号,电流调整模块对线圈电流进行精密控制和调整,实现对Bx0和By0的精密控制和调整。
功率控制电路中电压放大电路是OP27的反相比例放大电路,用以设置和调整线圈驱动电路的输出功率;功率放大器芯片为TDA 2030A,属于AB类放大器,具有低失真特性。功率放大电路如图7所示,采用TDA 2030A的单电源工作电路,输出端为高容值电解电容。
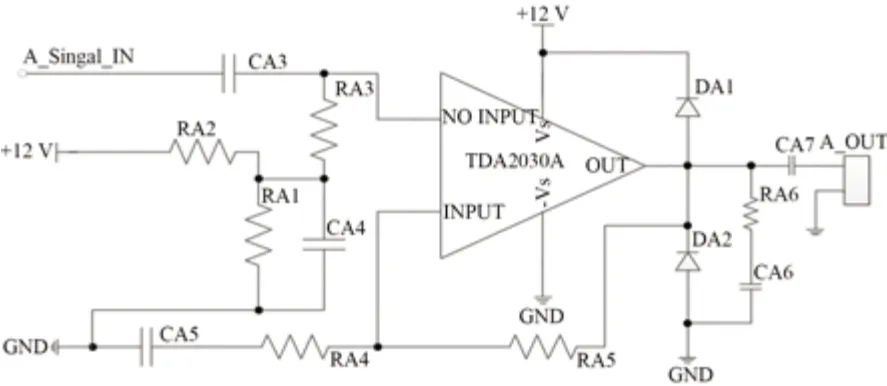
图7 功率放大器电路Fig.7 Power amplifier circuit
电流调整电路模型如图8所示,开展模块间耦合关系对线圈工作电流影响的仿真分析。模型中,信号源和功率放大器是输入,功率放大器输出端电容、功率电阻、线圈内阻及电感为模块的输出端和负载。线圈工作电流可以表示为:
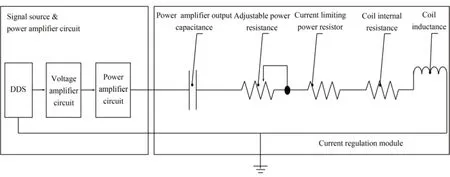
图8 电流调整电路模型Fig.8 Model circuit of current regulating circuit

式中:V̇s为功率放大器输出正弦信号的最大幅值,C为功率放大器输出端电容,R为功率电阻和线圈内阻之和、L为线圈电感为电路发生谐振时电流的最大幅值。
由式(6)可知,电流调整电路模型可以利用LC串联谐振电路特性进行分析。经测试,x轴线圈和y轴线圈20 Hz频点处的电感分别为116.46和141.05μH。当x轴和y轴功率放大器的输出电容分别为5 366 649和4 431 053μF时,电路发生谐振,然而实际中电路很难调整到谐振状态。
通过式(6)可以得到电流有效值的表达式:
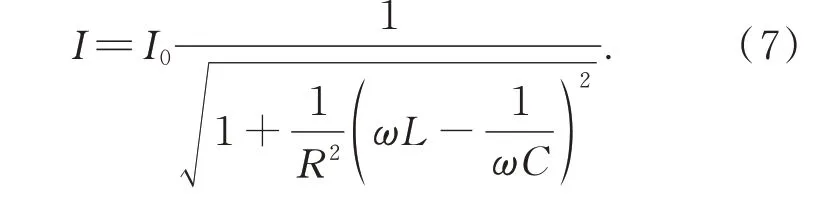
基于式(7)分析电流调整电路中各模块相互耦合关系对输出电流的影响特性。
图9是电流调整模块中功率放大器输出电容、功率电阻等对线圈输出电流的影响,仿真分析中V̇s=3 V。图9(a)中,R=3Ω,随着放大器输出电容C的增加,电流随之增加,当C为10 000μF时,电流接近极值,电容对电流的调整作用显著降低。从仿真结果可知,放大器输出电容C可以对线圈工作电流实现大范围的调整。当旋转磁场强度为500 nT时,C应控制在100~3 000μF内。图9(b)中C=1 000μF,随着功率电阻R的增加,电流线性减小。从仿真结果可以看出,功率电阻在0~50Ω、控制精度为0.1Ω时,旋转磁场强度的控制精度约为5 nT。在2.3节中,当旋转磁场强度波动小于9 nT时,其特性满足矢量原子磁力仪的应用需求,因此,该设计满足设计需要。
图9的仿真计算存在一定的理想情况。电流调整模块中各模块间相互耦合会出现更为复杂的情况,例如功率放大器输出端电容和功率电阻发生变化,并引起V̇s变化,而正是这种耦合关系进一步增加了电路调整的灵活性,这部分内容也是实验测试中需要验证的内容。
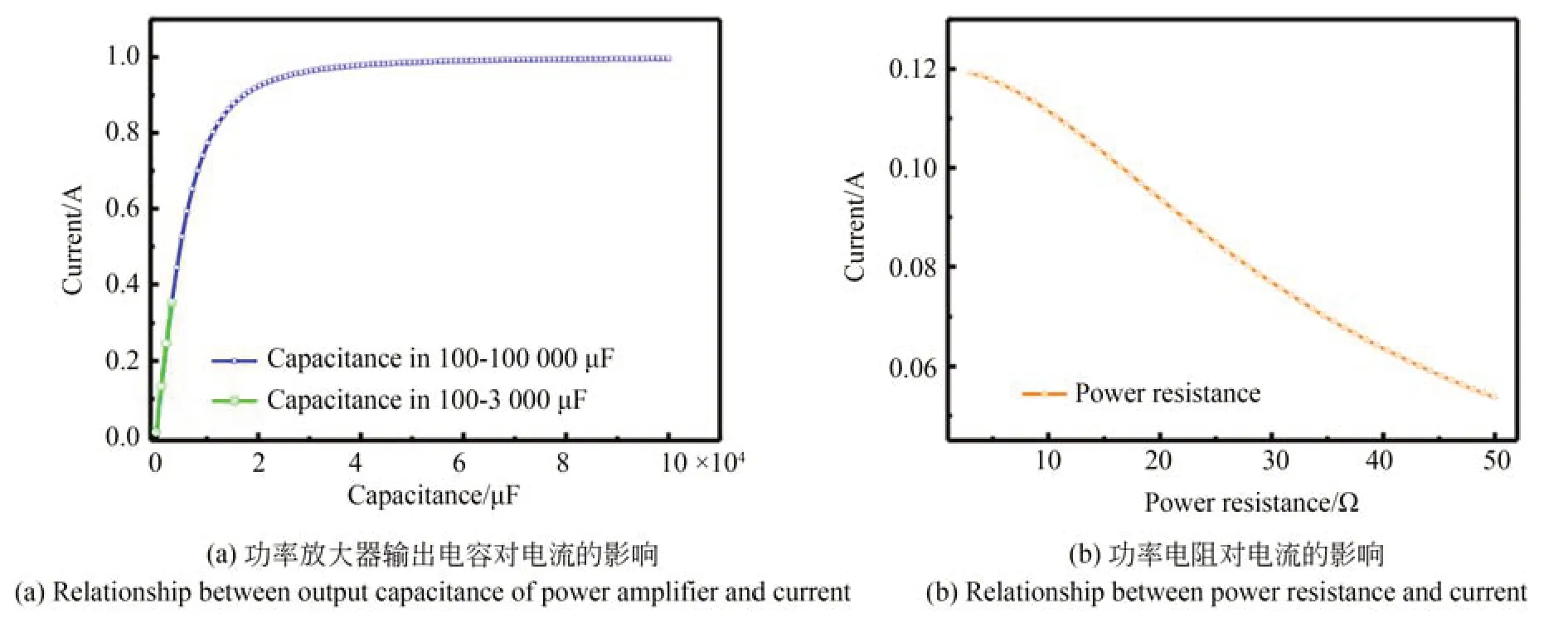
图9 电流调整中电流有效值的仿真计算Fig.9 Simulation results of effective values in current regulation module
4 测试及结果分析
4.1 测试实验系统
旋转磁场产生装置性能测试系统框图如图10(a)所示,图10(b)是旋转磁场产生装置测试系统实物。测试中,旋转磁场为20 Hz;万用表FLUKE17B+分别串联接入x轴和y轴线圈驱动电路,对正弦信号电流的有效值进行测量;Tektronix示波器DPO3032对线圈驱动电路中各组成部分的正弦信号峰峰值及相位进行测量。

图10 旋转磁场测试实验系统Fig.10 Rotating magnetic field test system
实验首先对线圈驱动电路的输出功率特性进行研究,其重点是电压放大电路、功率放大器输出电容、功率电阻和线圈等对输出功率以及线圈电流的影响特性。此外,旋转磁场产生装置对两正弦信号相位差的控制也是重要的测试内容。
4.2 驱动电路输出特性测试
4.2.1 功率放大器输出电压及电压增益
功率放大器输出电压及电压增益是在电路开路状态下测试的,输入信号幅值为100~500 mV,测试功率放大器的输出电压(即功率放大器输出电容处正弦信号的电压幅值)特性。图11(a)是x轴和y轴线圈驱动电路中功率放大器的输出电压曲线。输入信号为100~400 mV时,输出电压线性增加;输入信号大于400 mV时,电压出现失真,此时x轴输出电压为8.3 V,y轴输出电压为9.0 V。图11(b)是线圈驱动电路的输出电压增益曲线,经拟合y轴电压增益约为27 d B(22.38倍),x轴电压增益约为26 dB(20倍)。
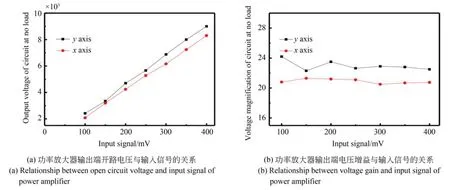
图11 功率放大器输出端特性测试结果Fig.11 Characteristic test result of power amplifier
4.2.2 电抗特性对输出功率的影响
线圈驱动电路中功率放大器输出电压会随着负载特性的变化而变化。电路各组成模块间相互耦合,共同决定线圈驱动电路输出功率以及线圈工作电流的特性。
图12是线圈驱动电路中功率电阻为2Ω、输入信号为100~400 mV、功率放大器的输出电容为220,470,1 000和2 200μF时,输出功率以及线圈工作电流的变化特性。图12(a)~12(c)是x轴线圈驱动电路的测试结果,图12(a)是x轴功率放大器输出电容C1处正弦信号幅值与输出电容C1、输入信号间的关系曲线。可以看出,C1越大,正弦信号幅值越接近开路电压,当输入信号大于350 mV时正弦信号出现形变,即电压失真;图12(b)是x轴线圈处正弦信号幅值的变化曲线,正弦信号幅值随着C1线性增加;图12(c)是x轴线圈驱动电路电流有效值的变化曲线,电流随着C1线性增加;图12(d)~12(f)是y轴线圈驱动电路的测试结果,图12(d)是y轴功率放大器输出电容C2处正弦信号幅值与输出电容C2、输入信号间的关系曲线,与图12(a)有相同的变化趋势,当输入信号大于350 mV时电压出现失真;图12(e)是y轴线圈处正弦信号电压峰峰值的变化曲线,与图12(b)有相同的变化趋势;图12(f)是y轴线圈驱动电路电流有效值的变化曲线,与图12(c)有相同的变化趋势。从图12中可以看出,x轴和y轴线圈驱动电路特性具有一致性,由于线路以及器件等因素又存在一定差异。从实验数据可以看出,功率放大器输出电容值增加的过程中,线圈驱动电路的输出功率和电流显著增加,当功率放大器的输入信号在0~400 mV、输出电容为220~2 200μF,线圈驱动电路电流调整为0~636 mA,则旋转磁场强度为0~24 168 nT。则可得出通过功率放大器输入信号与输出电容的协同控制实现线圈输出功率以及工作电流的大范围调整,这与图9(a)中的仿真结果相符合。

图12 电压对输出特性影响的测试结果Fig.12 Test result of influence of voltage on output charateristics
4.2.3 阻性负载对输出功率的影响
本节开展线圈驱动电路中功率放大器输入信号与功率电阻协同控制实现线圈驱动电路工作电流精密调整的验证实验。
图13是功率放大器输出电容220μF、输入信号70~100 mV、限流功率电阻2Ω、可调功率电阻分别为0,2,10,20和30Ω时,线圈驱动电路工作电流在输入信号与功率电阻协同控制下调整精度的测试结果。图13(a)和13(b)是x轴驱动电路线圈工作电流特性测试结果。图13(a)是输入信号线圈工作电流调整精度测试,当功率电阻为2,4,12,22和32Ω时,对应的线圈工作电流调整系数是0.209 9,0.189 8,0.178 2,0.148 8和0.139 3 mA/mV。图13(b)是功率电阻的线圈工作电流调整精度的测试结果,输入信号为70,80,90和100 mV,对应的线圈工作电流调整系 数 是-0.102 59,-0.122 12,-0.145 25和-0.169 49 mA/Ω。图13(c)和13(d)是y轴驱动电路测试结果。图13(c)为输入信号线圈工作电流调整精度测试,当功率电阻为2,4,12,22和32Ω,对应的线圈工作电流调整系数是0.235 3,0.219 4,0.206 4,0.181 1和0.157 2 mA/mV。图13(d)是功率电阻的线圈工作电流调整精度的测试结果,输入信号为70,80,90和100 mV,对应的线圈工作电流调整系数是-0.128 32,-0.158 01,-0.162 64和-0.208 21 mA/Ω。经测试输入信号调整精度为5 mV,则对应的最小电流调整精度为1 mA;目前功率电阻的调整精度为0.2Ω,对应最小电流的调整精度为0.03 mA,实验中并未准备相应精度的功率电阻,因此功率电阻最小电流的调整精度并未经过实验验证。当线圈驱动电路电流有效值为10 mA,即电流峰峰值为14 mA,旋转磁场强度为560 nT,此时对输入信号与功率电阻协同控制下的最小电流调整精度进行测试。测试结果显示,电流调整精度优于0.1 mA,则对应的磁场强度的调整精度优于5 nT,完全满足系统的应用需求。实验测试结果表明,利用驱动电路各模块的相互耦合特性,通过模块间协同控制进行旋转磁场强度精密控制和调整具有可行性,同时验证了本文旋转磁场产生装置设计的合理性。

图13 工作电流在输入信号与功率电阻协同控制下的测试结果Fig.13 Test results for working current under control of input signal and power resistance
4.3 正交信号源相位调整精度测试
图14是两正交信号相位差调整精度的测试结果。受线圈驱动电路影响,正交信号源输出信号传输至x轴和y轴线圈时相位差变化特性的测试结果如图14(a)所示,两正弦信号相位差偏离了90°。经11组数据取平均后相位差为86.158°,线圈驱动电路引起的相位差变化量为3.8°,对相位变化量进行补偿,两AD9852相位控制字差由0x1000调整为0x10AD。图14(b)给出了相位补偿后的测试结果。对16组数据取平均得到两正弦信号相位差为90.145°,说明相位变化量得到很好的补偿,满足了系统的技术要求。
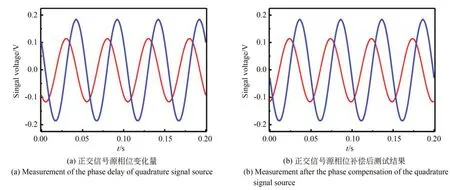
图14 两正交信号相位差调整精度测试结果Fig.14 Test result for phase difference compensation of quadrature signal sources
4.4 旋转磁场产生装置稳定性分析及后续改进
从测试结果可以得出旋转磁场产生装置对磁感应强度、相位差具有很好的调整精度,完全能够满足矢量原子磁力仪地磁场测量的需求。然而,在时域上旋转磁场的工作频率和磁感应强度仍然存在一定的漂移,势必会影响矢量原子磁力仪测量结果的可重复性和准确性,应在后续设计中进行改进。此外,调试过程中发现,DDS相位同步技术对PCB设计以及工艺有很高的要求,偶尔会出现相位不同步的现象,笔者认为要实现高性能、高可靠的相位精密调控的多路输出信号源,应基于FPGA通过严格的时钟和时序管理,才能从根本上解决这个问题。
5 结 论
本文提出的旋转磁场产生装置通过输入信号、功率放大器输出电容可以实现线圈驱动电路工作电流的大范围调整,并产生磁感应强度在0~241 68 nT内的旋转磁场;通过输入信号与功率电阻的协同控制,可以实现磁感应强度的精密调整和控制,当旋转磁场为560 nT时,磁感应强度的调整精度优于5 nT;正弦信号相位差设计的控制精度是0.022°,测试结果显示正弦信号相位差变化量得到了很好的补偿和调整。综上所述,该旋转磁场产生装置的各项技术指标完全满足矢量原子磁力仪对地磁场测量的应用需求。旋转磁场产生装置为矢量原子磁力仪的研制奠定了技术基础,也可用于冶金[24]、生物科学、医疗诊断以及相关的基础物理研究,具有很强的工程应用价值。
猜你喜欢
地震地磁观测与研究(2023年3期)2023-10-19 08:23:36
河南科技(2022年22期)2022-12-26 00:12:19
中学生数理化·高一版(2021年11期)2021-09-05 12:21:24
中学物理·高中(2017年9期)2017-11-07 12:53:53
西安工程大学学报(2016年6期)2017-01-15 14:09:07
现代防御技术(2016年1期)2016-06-01 12:13:28
地质装备(2016年1期)2016-03-10 09:05:28
新高考·高一物理(2016年1期)2016-03-05 22:47:39
中国老年学杂志(2015年18期)2015-12-30 08:45:41
卷宗(2014年1期)2014-03-20 15:02:09
