
改进指数趋近率的PMSM矢量控制研究
2022-04-15 09:27高永超尹红彬陈明轩陈鹏飞
重庆理工大学学报(自然科学) 2022年3期
高永超,尹红彬,陈明轩,陈鹏飞
(山东理工大学 交通与车辆工程学院, 山东 淄博 255049)
电动汽车电机的选择主要考虑可靠性、高效性和鲁棒性。近年来,永磁同步电机以其功率密度高、输出转矩大等优势深受国内电动车厂商青睐[1]。电动车驱动电机的控制也成为研究热点,然而,任何电机驱动器的控制性能都可能受到以下2种因素的严重影响:① 由参数变化和模型不确定性引起的内部扰动;② 与传感器故障或意外的速度或转矩变化有关的外部扰动。
目前,三相PMSM常运用传统的速度控制调节器作为其转速环控制器,如PI调节器。这种方法计算方便、占用资源少、可靠性较高,并且能较简单地进行参数整定,但也存在抗扰动性能差等不足。如果系统受到外界干扰,则传统PI速度控制器无法让系统完美运行,滑模控制应运而生,由于特殊的设计,使其有较快的响应速度,更重要的是其对外界干扰和系统内部参数变化抵抗力较强,因而具有很好的鲁棒性。滑模控制是一种特殊的非线性控制系统,不同于常规控制,主要在于控制的非连续性,即一种使系统“结构”跟随时间变化的开关特性[2-3]。
高为炳[4]利用趋近律的概念,提出了一种用于消除系统的抖振方法。文献[5-7]采用改进滑模观测器的方法提升系统的抗扰动能力。许多学者致力于消除抖振,提出了不同的方法,如高阶滑模理论[8]、模糊理论[9]、神经网络理论[10]等。另外,从数学角度入手,通过改进滑模趋近率来提升滑模控制的性能也是一大研究方向。苗敬利等[11]在矢量控制的基础上,设计了一种基于MARS的PMSM神经滑模控制策略。文献[12-13]为了解决幂次趋近律收敛速度过慢的问题,提出了双幂次趋近律与多幂次趋近律。诸德宏等[14]提出一种变指数多幂次趋近率,并对该算法进行了仿真验证。赵峰等[15]在速度环提出一种基于分段函数的新型趋近率来抑制滑模固有的抖振问题,并提高系统的动态响应性能。刘京等[16]通过选取指数项、系统状态、可变项、终端项和线性增益,进行新型趋近律的设计,解决了系统抖振和滑模面趋近时间的矛盾,并设计了滑模扰动观测器。周杨等[17]在传统指数趋近率等速项系数引入含有指数项的分数多项式,并采用可变边界层饱和函数替代原有的符号函数,使系统有较好的动态品质。
上述文献的研究结果验证了滑模控制对三相PMSM的有效性。本文基于三相PMSM滑模速度控制器,设计了新型的滑模趋近率,使系统具有更快的动态响应以及更小的系统抖动,并在Matlab/Simulink中搭建了实验模型,仿真验证了设计的合理性。
1 三相PMSM模型
不同于直流电机,三相PMSM具有耦合强、非线性的特点,直接控制难度较大,因此必须要建立相应的数学模型便于研究[18]。为了使控制器设计简单,以表贴式PMSM为例创建同步旋转坐标系下的数学模型:
(1)
此时电机的机械运动方程为:
(2)
其中:pn为极对数;Ls为定子电感;ωm为电角速度;id、iq分别为定子电流的d、q轴分量;Ld、Lq为d、q轴的电感;t为时间;ωf为转子永磁体产生的磁链;J为转动惯量;TL为负载转矩。
对于表贴式PMSM来说,要获得较好的控制效果可采用id=0控制方法,此时由式(1)和式(2)变为式(3):
(3)
2 滑模控制基本原理
滑模控制(sliding mode control,SMC)是一种变结构控制,其控制是非线性的。这种特性能够让被控制的系统于一定条件下进入“滑动模态”,即沿着预设的状态轨迹作小幅、高频率的波动。这种滑动模态是可以利用数学方法进行设计的,特点是与扰动或系统参数无关,因而鲁棒性优越。
如图1所示,2个阶段共同构成了滑模运动的整个状态,第1部分为AB段,其实质为运动向滑模面靠近并首次接触滑模面;第2部分为BC段,其实质是系统在设计的滑模面s(x,t)=0周围上下运动的阶段。
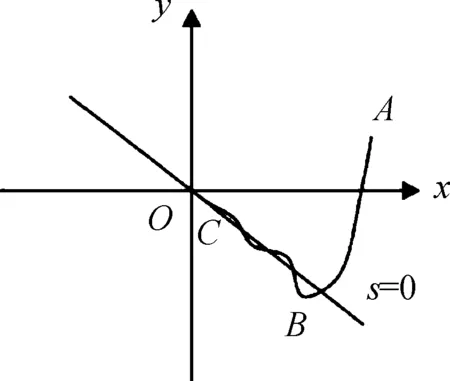
图1 滑模运动示意图

1) 等速趋近率:

(4)
2) 指数趋近率:

(5)
3) 幂次趋近率:
(6)
4) 一般趋近率:

(7)
式中:ε为趋近系数;q为指数趋近系数;α为高阶趋近系数。通过改变趋近系数得到不同的趋近速率,想要更快的趋近速率就需要更大的趋近系数,而此时整个滑动模式的灵敏度也会大大提高,产生超调量,并造成冲击;反之,如果其值选取过小,滑模控制的响应速率将下降,系统控制性能下降。 不同于PI控制,在滑模控制过程中,无法直接量化系统的误差,因此,选取合适的趋近法是使系统获得更短响应时间的必要条件。
3 滑模速度控制器的设计与比较
3.1 滑模速度控制器
滑模控制本质上是矢量控制的一种,图2为三相PMSM矢量控制结构。对于表贴式PMSM而言,采用id=0的转子磁场定向控制方法即可获得如下数学模型:
(8)

图2 三相PMSM矢量控制结构框图
经过拉普拉斯变换即可得到状态方程形式:
(9)
定义PMSM系统的状态变量:
(10)
式中:ωref为电机的参考转速,一般作为常量来看待;ωm为电机的实际转速,又根据式(4)可知:
(11)
(12)
3.2 传统指数趋近率的滑模控制器
定义一阶滑模面函数为:
s=cx1+x2,c>0
(13)
式中:c为待设计参数。
对式(13)求导得到趋近率:
(14)
将指数趋近率的表达式(5)代入到式(12)中,得到指数控制器表达式:
(15)
相应的q轴参考电流为:
(16)
可以看出,一般指数趋近率由指数趋近项和等速趋近项2项构成,2项各司其职,其中指数趋近项能够让系统的趋近速率较快地逼近零,因此很好地缩短了这部分的耗时,并且使运动点以一个很低的速度到达切换面;等速趋近项的常数部分用于控制收敛速度,增大常数能够加快正常运动时的收敛速度,相应地带来的不利就是滑动模态的系统抖振变大,反之将减小抖振,相应地正常运动阶段的收敛速度会减小。故可得出结论,抖振大小与收敛的快慢是一对天然的矛盾。一般的指数趋近率并未着重把握这对矛盾。图3为一般指数趋近率滑模控制器内部结构。

图3 一般指数趋近率滑模控制器结构示意图
3.3 改进的指数趋近率滑模控制器
着力于使系统有较快的响应速度,同时减少系统滑模切换面上的抖振,因此,需要对一般的指数趋近率加以改进。
改进型的指数趋近率为:
(17)
式(17)相比原趋近率,变速趋近项替代了原来的部分,使得趋近速度大小与(kx1)2成正比,因此,状态点相较于切换面距离较远时,趋近速度提高很大;反之,趋近速度很小。采用这种方式的等速趋近项能够增加系统的快速响应并且能够削弱抖振。
因此,可以得到新型指数控制器的表达式:
(18)
从而可得q轴参考电流:
(19)
定义Lyapunov函数:
(20)
对式(20)求导,并将式(17)代入可得:

-ε(kx1)2s2-qs2≤0
(21)
由此可见,改进的幂次趋近率满足滑模到达条件。
4 系统建模与仿真
为了验证上一节理论的正确性,建立Matlab/Simulink模型,包括转速环调节器、电流环调节器、坐标变换器、SVPWM生成模块、逆变器以及三相PMSM模块,具体参数如表1所示。图4为改进指数趋近率的滑模控制器的仿真模型。

表1 仿真参数

图4 改进的指数趋近率控制器结构示意图
图5为系统在0.2 s时突然加载负载,一般指数趋近率与改进后的指数趋近率转速曲线。一般指数趋近率,电机从零速上升到参考转速1 000 r/min时,有超过20%的超调量;采用改进型指数趋近率可以很好地避免这一问题,一般趋近率在0.06 s时达到额定转速,改进的新型趋近率在0.04 s达到额定转速,具有较快的动态响应速度。在0.2 s时突加负载转矩TL=10 N·m后,采用新型指数趋近率的滑模控制器能更快地恢复额定转矩,从而说明了改进型指数趋近率可以快速无超调地达到额定转速,且加载时转速波动小,能很快地恢复到给定转速,以此满足实际电机性能的需要。

图5 转速波形曲线
如图6所示,采用一般指数趋近率的SMC控制器得到的电流波形曲线,其最大电流波动约为38 A,采用改进的指数趋近率的滑模速度控制器得到的电流波形图最大波动约为28 A,电流波动在0.03 s左右停止,而一般趋近率电流波动持续到0.05 s(如图7);图8、图9分别为一般指数趋近率下和改进指数趋近率下的电磁转矩波形曲线。可以看出,虽然一般指数趋近率的电磁转矩从零时刻开始到趋于稳定的时间较短,但这对0.2 s后突然加入的负载影响甚微,相反,采用改进指数趋近率的电磁转矩波形在0.2 s加入负载后,恢复稳定的时间更短,因此有着更好的抗扰动性能。
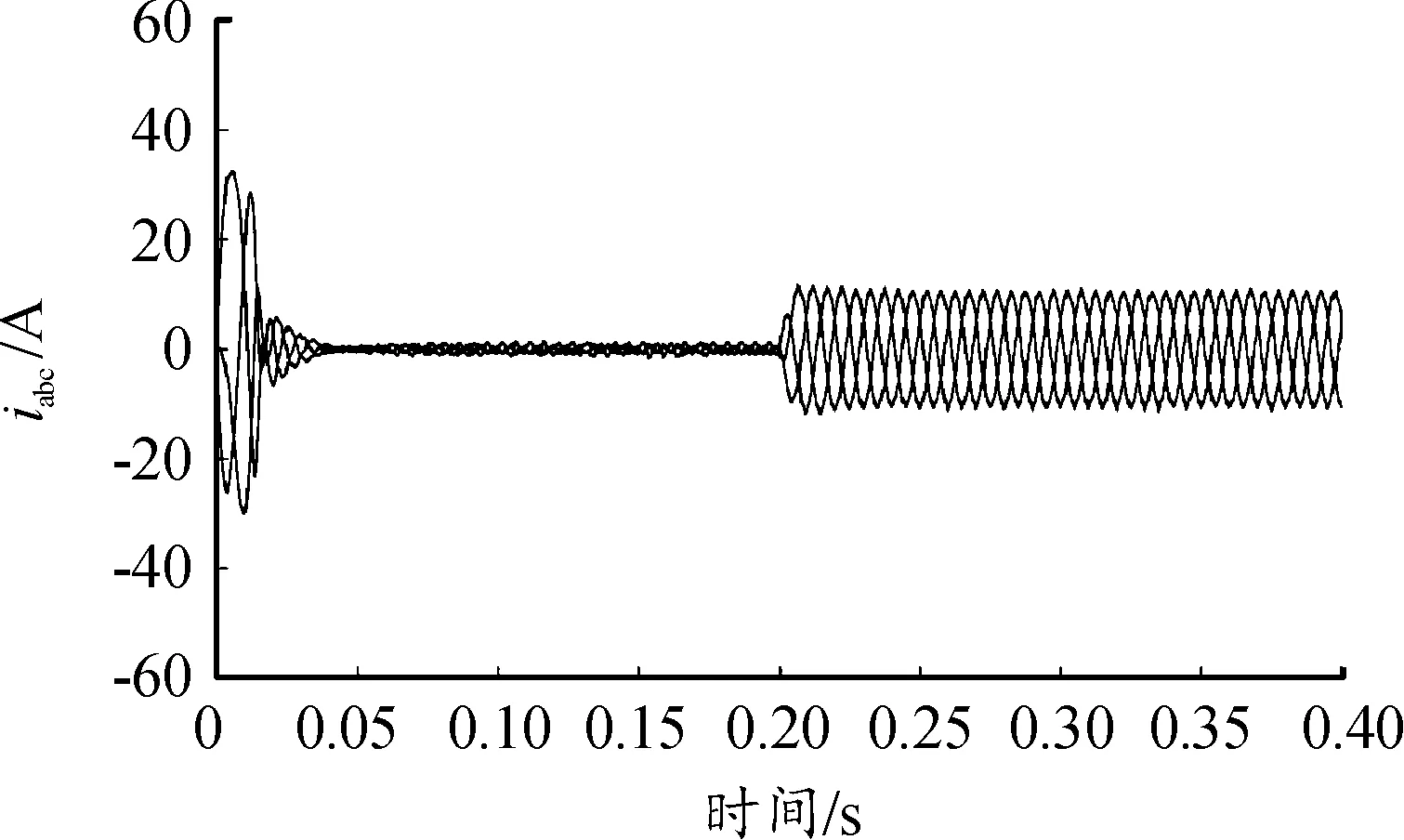
图6 改进前的三相电流波形曲线

图7 改进后的三相电流波形曲线

图8 改进前的转矩波形曲线

图9 改进后的转矩波形曲线
5 结论
为了提升车用永磁同步电机控制系统的动态性能,提出了一种改进型指数趋近率的滑模控制器。证明了其稳定性,以表贴式三相永磁同步电机为例,运用id=0控制方法,在Matlab/Simulink中搭建速度控制仿真模型,与原有的指数趋近率进行分析对比。结果表明,运用改进的指数趋近率的速度控制器,能消除转速的超调量并且有着更好的抗干扰性能,证明了理论推导的正确性,说明本趋近率用于矢量控制的PMSM调速切实可行,对于空载初始运行的抖动有待进一步研究。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
防爆电机(2022年3期)2022-06-17
大电机技术(2022年2期)2022-06-05
防爆电机(2022年2期)2022-04-26
科学技术创新(2021年35期)2022-01-14
昆明医科大学学报(2021年12期)2021-12-30
防爆电机(2021年5期)2021-11-04
建材发展导向(2021年14期)2021-08-23
防爆电机(2021年2期)2021-06-09
电机与控制学报(2018年9期)2018-05-14
