
假肢控制中感知反馈技术的研究进展
2022-04-11 23:48作者梁斌卢彦慧黄异张政陈颖蒋睿孙富华
中国医疗器械杂志 2022年2期
【作者】梁斌,卢彦慧,黄异,张政,陈颖,蒋睿,孙富华,
1 西南医科大学附属医院 康复医学科,泸州市,646000
2 西南医科大学 康复医学系,泸州市,646000
0 引言
假肢作为替代截肢患者肢体部分缺失或受损功能的重要辅助工具,通常包括上肢假肢和下肢假肢。截至2017年,在我国的各类残疾中,肢体残疾患者超过三分之一,其中大部分为四级残疾,假肢的需求量巨大[1]。传统假肢控制方法单一,需要花费大量的时间和精力训练和适应,在许多情况下,要重新培训和学习如何使用某些肌肉群。传统假肢没有反馈功能,使用者只能集中注意力,时刻观察假肢的使用情况,这会大大影响患者其他日常活动。为解决这一难题,利用微加工技术,基于先进材料设计和人体神经肌肉系统,开发了轻便的假肢。新型假肢可以从截肢者的残肢或先天不同肌肉收缩中感知肌电信号,使其控制更简便[2]。为了控制更精准,有研究者在假肢上附加了震动刺激反馈、机械刺激反馈、电刺激反馈、皮肤形态刺激反馈和声音刺激反馈等感知反馈系统[3-5]。
感知反馈系统可将假肢传感器接收的信号反馈给佩戴者,进而辅助佩戴者利用反馈信号灵活操控假肢动作。根据国内外研究,感知反馈系统根据反馈终端在人体上的位置,可以分为侵入式反馈和非侵入式反馈。下面分别以这两种方式分析感知反馈系统在假肢的应用现状与发展趋势,以期能给予进行假肢感知及其反馈技术研究的相关研究人员一定的借鉴和参考。
1 侵入式反馈
假肢侵入型反馈是指通过外科手术,在患者的残肢中植入电极,从而完成对假肢的反馈控制。根据所刺激的神经和方式不同可分为针对性神经刺激、周围神经刺激和中枢神经刺激三类[6]。其中周围神经的刺激技术相较其他方式更易实施且手术风险更小,是目前发展得最为成熟的侵入式反馈方式。
1.1 靶向神经刺激反馈
靶向神经移植术是指通过手术干预,将之前支配被截肢肢体的神经转移到另一个更近端的位置,以避免截肢的影响。该技术主要通过增加控制部位的数量来减轻假体的运动控制,而且重建的神经还可以把感知信息传递到覆盖在肌肉上的皮肤。靶向神经移植术主要用于肩关节脱位、经肱骨和桡骨的截肢患者。
HEBERT等[7]通过比较皮肤压力敏感性阈值和解剖感觉图,研究了三种不同感觉神经移植技术的效果。证实了当把正中神经的感觉束或尺神经的感觉束连接到皮肤区域时,手的感觉是可以恢复的。神经移植后能够对假体进行直观的运动控制,而且可能有助于探索未来的感觉增强技术,以应用于闭环假体控制。
1.2 中枢神经刺激反馈
基于“脑-机-脑接口”的假肢通常是从大脑的运动区域(motor cortex)提取运动指令,在体感区域(somatosensory cortex)传递皮质内微刺激反馈,将触觉信息反馈到相应的区域[8]。研究发现[9],对体感区域传递皮层进行电刺激,同时对橡胶手进行刺激,可以诱发身体所有权的感觉。而且,即便是四肢瘫痪患者,也可以通过运动皮层的皮质神经界面控制多自由度的假肢[10]。
CALDWELL等[11]利用开发的信号恢复算法,恢复受试者受到刺激时的侵入性电生理信号。研究中显示这种方法可用于皮质电图(electrocorticographic,ECoG)阵列和深部脑刺激(deep brain stimulation,DBS)神经信号的恢复。
大脑皮层与肌肉运动的关系也极为密切,肌肉运动前大脑会发出指令,植入大脑的电极会采集大脑信号,进行分析后控制假肢运动。由于是脑信号直接控制假肢运动,所以对残肢肌肉的要求不高,但如果要将电极植入大脑中,风险极高,且大脑信号较其他信号更为复杂。
1.3 周围神经刺激反馈
刺激周围神经就是采用电刺激的方法刺激患者残肢内的残余神经,将反馈信息通过神经直观地反馈给患者,从而实现对假肢的直观控制与感觉[12]。这种方法的优点是:神经具有可塑性,在不同环境、各种刺激下,神经会表现出强烈的代偿与适应能力。在结构与功能上,损伤后的修复和重建的能力也是极强的。另外,神经的电生理活动不会因疲劳而不准,神经信号的可重复性很高,而且神经信号在传递时彼此之间互不干扰,便于辨别出正确的神经信号[13]。
CRACCHIOLO等[14]同时采集了截肢患者在试图做抓取动作时的表面肌电和神经内信号。然后对每个神经信号中的单个单元活动(single unit activity,SUA)进行排序,以确定信号最活跃的单元。并利用采集的肌电信号提取了肌电包络线,通过一种转换器反映抓取动作所需力和速度的水平。研究中使用不同的解码方法基础的肌电信号,实验结果(见表1)显示,利用周围神经信号重建的表面肌电反馈方式,可以使抓取动作的精确度达到85%。本研究创新地利用桡骨截肢患者外周神经信号解码假肢的抓握力和速度,此方法依赖于使用SUA重建的肌电包络。由于只在训练阶段依赖肌电图,此方法可以充分利用植入神经接口的优势方法可以充分利用植入神经接口的优势,并有可能在中长期内克服目前最先进的方法。
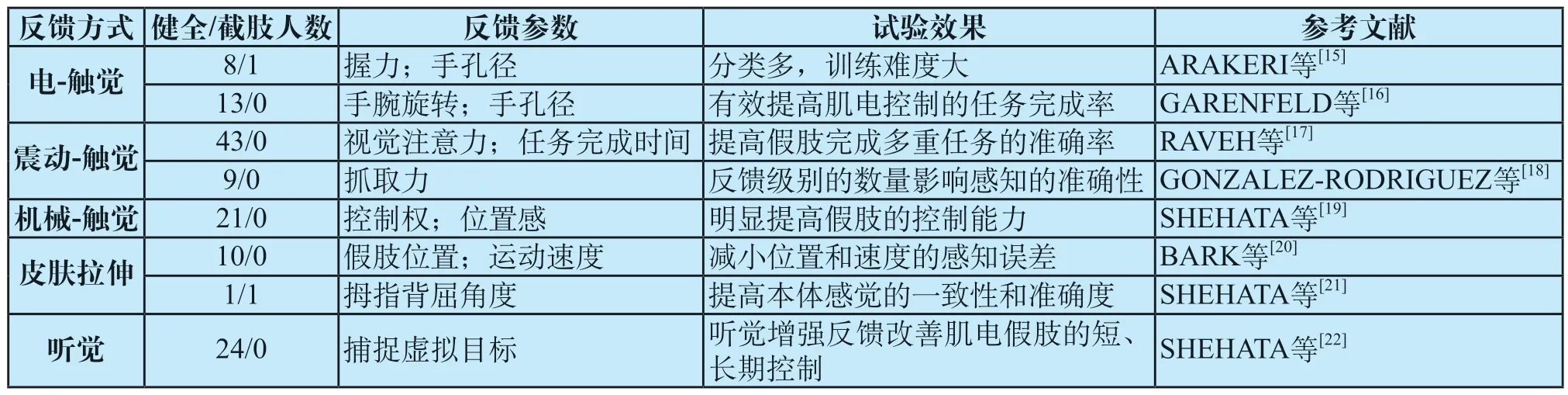
表1 不同感知反馈技术的统计对比Tab.1 Statistical comparison of different sensory feedback techniques
2 非侵入式反馈
通过侵入式反馈,受试者虽然可能感受到更接近本体的触觉,但许多患者不喜欢手术干预。基于此,有研究提出使用非侵入式的感官通道或不同的反馈方式向假肢用户提供感官信息,如电-触觉反馈、震动-触觉反馈、机械-触觉反馈、皮肤拉伸反馈和听觉反馈等,如表1所示。
2.1 电-触觉反馈
非侵入式电-触觉反馈方式是利用皮肤表面配置的电极施加一定参数的电刺激,从而引发受试者的感知反馈。此类反馈方式可通过调控电流的波形、幅值、频率和占空比等参数,使受试者产生痒麻、疼痛、灼烧等感觉。但为了使假肢的动作与感觉反馈相匹配,受试者需通过前期的训练将反馈信息与刺激参数、位置等建立关联模式[23]。非侵入式电刺激反馈在响应效率和自然感官方面不如侵入型反馈方式,但非创伤、易操作等优势使非侵入式电刺激反馈在肌电假肢控制中得以广泛研究。
ARAKERI等[15]利用传感器将接触力和手指成环的大小两组参数的电信号通过颈部左、右侧配置的两个独立电极反馈给受试者,让他们利用反馈信息区分27个不同重量、尺寸和柔韧性的物体。研究结果显示,在没有训练的情况下,受试者的识别能力远高于随机猜测。进一步地,经过5天的训练,受试者的识别能力提高了75%左右。简单、无创的电-触觉反馈可以提供有用的感知反馈,可有助于改善对假肢的控制。GARENFELD等[16]开发了具有空间编码和幅度编码两种新颖的多通道电触觉刺激反馈方式,并通过手腕旋转和手孔径等本体感觉信息的传递,对在线肌电控制过程进行评估。研究中利用空间编码和振幅两种反馈配置,受试者完成特定任务的成功率高于90%。结果显示,两种反馈配置集成在两自由度假体中,增强了假肢的实用性。
2.2 震动-触觉反馈
震动-触觉是触觉反馈最常见的形式,利用震动刺激人体触觉器官获得反馈信息,对于人体而言可以感受到小于1000 Hz的重复压刺激。在早期的假肢中的震动反馈设备笨重且不完善,而近年来随着设备的更新换代,震动器变得普及且低耗,甚至有嵌入式的插座来避免电线对于行动的阻碍[24-25],并且伴随着颤振系统的应用研究,震动反馈的使用能够通过更好地控制抓地力和降低任务执行中的错误数量来提高用户的性能。
RAVEH等[17]利用震动刺激反馈辅助sEMG 信号控制右手假肢抓握物体,同时让左手操纵电脑进行汽车游戏。在受试者左、右手同时进行不同任务时,研究者用眼动仪对其注意力进行评估。研究发现,有无震动刺激反馈对受试者的视觉注意力或表现时间并无显著影响。GONZALEZ-RODRIGUEZ等[18]利用单一的震动-触觉致动器将震动信息传递给参与实验的受试者,通过驱动模式、频率和振幅参数的选择来区别不同的反馈水平。研究发现,图案形状、振幅和频率的变化对反馈感知影响不显著,但减少反馈水平的量级可以提高反馈感知的准确性,这表明在上肢假肢上应用震动刺激反馈时,有必要对参数进行微调。
2.3 机械-触觉反馈
机械-触觉反馈通常是指由外物对皮肤施加推力,如果在假肢手指上显示压力的作用,此时感知到的信息与施加的外部刺激相同,可以认为是一种模态匹配的感觉反馈[26]。这种机械-触觉反馈可引起显著的类本体感觉,感知的刺激信息与自体手的真正触觉类似。与其他反馈方式相比,机械-触觉反馈拥有足够精准的优势,其中的模态匹配系统需要的认知水平更低[27]。CIPRIANI等[28]利用模态匹配力反馈,让受试者通过改变他们食指和拇指的间距来控制机械手的两个相反的手指,并完成抓举任务。假肢指尖施加在测试对象上的作用力反馈到右大脚趾和第二个脚趾。实验结果显示,受试者可以将脚接收到的力反馈纳入他们对机械手的感觉运动控制中。ANTFOLK等[29]提出了一种多位点机械触觉系统的概念,并利用它研究了经径向截肢残余肢体的定位和压力水平判别,真正的智能假肢也同样未来可期。
SHEHATA等[19]基于橡胶手错觉原理,利用感觉模拟假肢评估机械-触觉反馈、主动运动控制及两者结合对假肢控制的作用程度。结果表明,感觉模拟假肢与上肢截肢患者配置的假肢可以表现出类似的动作方式。当在主动运动控制任务中,机械触觉感觉反馈不仅有助于改善受试者所有权和位置感,而且可能对控制权有调节作用。此工作使研究和控制影响假肢中主动电机的复杂参数成为可能,使假肢的操控定量化、更精准,而不仅仅依赖主观感知。
2.4 皮肤拉伸反馈
关节运动一般伴随着皮肤拉伸,相反,利用皮肤拉伸同样可以传递关节位置和速度的信息。而且相较于震动-触觉反馈或电-触觉反馈,皮肤拉伸反馈的信息更直观[30]。
BARK等[31]使用的台式皮肤拉伸装置与力传感器控制的虚拟物体的盲闭环定位任务中,将单个震动-触觉反馈和无反馈进行了比较。受试者在皮肤拉伸反馈方式作用下感知位置和速度的误差最小。研究发现,有必要给出物体的动力学信息,以显示震动或皮肤拉伸提供的相对粗糙的反馈的优势。由于假肢反馈控制的不一致性和噪声特性,加上非线性关节动力学,将使开环策略不太有效,而触觉显示更有益。该团队进一步利用一种可穿戴的触觉反馈设备根据旋转皮肤拉伸以提供关于虚拟对象运动的反馈[20]。该设备使用了一个小型压电电机,这种电机重量轻、扭矩适中、转动平稳,不会产生干扰拉伸感觉的震动。实验结果显示,受试者可以使用该设备的反馈来控制一个虚拟对象的方向,并能使精度保持在几度范围内。受试者被要求识别在被动状态下随机施加的皮肤拉伸水平,但此时的准确率较低,受试者会混淆正旋转和负旋转。
SHEHATA等[21]开发了一个实验方案来定量和定性评估非侵入性震动肌肉腹部时所引发的本体感觉的动觉错觉。并通过皮肤拉伸反馈的整合来操纵皮肤信息,以提高错觉的一致性和强度。研究中对截肢患者(膝盖以下)进行的初步测试结果表明,拉伸皮肤同时震动残肢腹部肌肉(90%)会比仅震动肌肉(50%)产生更强烈、更一致的动觉错觉。而且拉伸皮肤可以提高肌肉震动引发的幻觉运动的范围(1.5倍)和速度(3.5倍)。实验结果发现,皮肤拉伸可能使各种动作控制回路中控制反馈机制得以发展,将改善下肢假体的性能。
2.5 听觉反馈
增强反馈可以方便地传递人工本体感觉和外部感觉信息,有助于建立强有力的内部模型。与视觉反馈不同,音频需要较少的注意力集中,并减少分心[26]。SHEHATA等[22]已经在机器人遥控操作和脑-机接口(brain computer interface,BCI)中使用了音频增强反馈,在虚拟目标捕获时间受限的任务中,使用通过音频反馈增强的滤波控制策略,评估短期性能和内部模型强度。结果显示,在使用肌电控制器进行训练以提高其内部模型强度时,向假肢佩戴者提供音频增强反馈可提高其完成任务的成功率。
3 总结与展望
侵入性反馈可以通过外科手术植入的电极来提供,该电极以残肢内的传入神经为目标,可更加精准、快速地传递大脑的信号,但现有的手术不够成熟且风险较大,同时患者的接受程度存在不足并具有引发接近自然的触觉的潜力。
非侵入性刺激通常依赖于个体学习,以正确识别人工感觉刺激的能力。震动-触觉依赖于微型马达与皮肤之间产生的震动,而电-触觉刺激需要传递电脉冲使皮肤触觉激活。此外,皮肤拉伸、听觉反馈以及视觉反馈等也都是无创的反馈方式。然而,此类方法相较于侵入式反馈也存在一些缺陷。一方面,触觉界面的带宽有限。由于受生理和技术的限制,只有有限数量的信息可以传输给用户。另外,所提供的反馈可能是非直观的,因为用户被要求通过依赖不同性质的变量控制假体变量。这意味着提供的信息在正常情况下不用于在线控制。受试者通常使用视觉、手触摸或者压力来控制运动,而震动频率或强度是一种新的和不熟悉的输入。因此,依赖于触觉的感觉替代意味着训练和适应,随着反馈复杂性的增加,训练和适应变得更长、更乏味。另一方面,具有复杂编码方案的多通道接口变得越来越重要,其灵活的多功能系统更适应现代假体。
假肢的感知反馈技术已研究了多年,但在临床应用中还有许多问题亟须解决,如反馈分辨率小、传感器体积大、精度不足、训练难度大等。因此,为使肌电假肢更逼近本体肢体的感知能力,开发尺寸小、分辨率高的传感器仍是关键。另外,利用软件和硬件平台的灵活性,建立一个假体局域网络、模块化的反馈系统,可以适应几乎任何应用场景,例如使用智能手表或智能手机来传达各种离散事件(如触摸、滑动、功能切换等)或连续变量(如力、孔径、肌电图、手腕旋转等),通用智能设备可以取代功能(如震动触觉刺激),提供完整的闭环控制解决方案,是近年来智能假肢的另一个研究热点,这种系统可以集成模式识别/回归训练、自适应以及反馈。未来的假肢技术路线将是多种反馈技术相结合,能够精准而快速地做出肌电信号的反馈,以较完美地替代假肢佩戴者的残缺肢体行使应有的功能,提高其生活质量。
猜你喜欢
疯狂英语·新读写(2022年5期)2022-11-22
东北大学学报(社会科学版)(2022年1期)2022-02-17
海外星云(2021年6期)2021-10-14
中外文摘(2020年19期)2020-10-31
意林·全彩Color(2018年7期)2018-08-13
红豆(2017年4期)2017-04-13
电脑爱好者(2015年17期)2015-09-10
意林(2013年11期)2013-05-14
杂文选刊(2007年16期)2007-05-14
