
基于下肢康复机器人的激光雷达步态测量系统
2022-04-11 23:48作者刘锦郭帅郑俐张芷箐
中国医疗器械杂志 2022年2期
【作者】刘锦,郭帅,郑俐,张芷箐
1 上海大学 工程训练国家级实验教学示范中心,上海市,200444
2 上海市医疗器械检验研究院,上海市,201318
0 引言
所谓步态,指的是人类机体在行走运动时足部所呈现的姿态[1]。正常的行走过程是神经对肌肉协调支配的综合结果,当神经受到损伤或者大脑功能有缺陷时,行走时会呈现各种各样的异常姿态[2]。由帕金森、脑卒中等引起的步态疾病已成为当今社会日益严峻的问题。这些疾病不仅使患者缺乏独立生活的能力,而且增加了医疗和社会服务的费用。对于帕金森和脑卒中等步态障碍,步态康复训练被证明是有效的,而步态分析是步态康复的关键环节,通过步态分析可以诊断疾病以及评估康复情况,以便更好地推进康复训练的进行。通常,步态康复训练是由康复理疗师主导。近年来,机器人辅助康复治疗的方法因其安全性和可控性越来越受到大众的关注,这极大地减轻了理疗师的工作[3]。目前步态测量系统主要以光学运动捕捉系统和压力板为主[4-6],但这些系统因其高昂的价格且测量范围受限不适用于用在下肢机器人上。因此,本研究基于康复机器人提出了一种使用激光雷达传感器的步态测量系统,具有成本低、安装简单且不受场地限制的特点。通过与光学运动捕捉系统进行对比,验证了本系统的准确性。
1 步态测量系统
1.1 系统整体结构组成
本系统旨在对使用下肢康复机器人进行康复训练的患者进行步态测量,系统的整体结构,如图1所示。通过激光雷达传感器采集步态信息,并将数据传输到康复机器人的下位机,利用步态算法进行数据的处理与计算得出步态参数,将步态参数传输到康复机器人上位机进行实时显示。
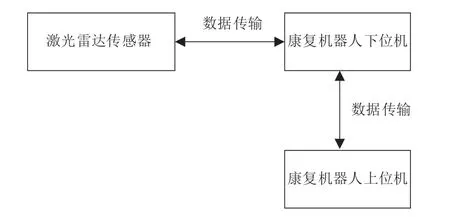
图1 步态测量系统组成Fig.1 Composition of gait measurement system
激光雷达选用杉川机器人有限公司的Delta-3A型激光传感器,量程为0.25~16 m,扫描范围为360°,采样频率为8 kHz,测量分辨率为 1 mm,角度分辨率为0.25°,该传感器能在较低的成本下拥有较高的测量精度。
本研究采用的下肢康复机器人是上海市智能制造及机器人重点实验室所研发的IreGo智能下肢康复机器人,其机械结构图与实物图分别如图2(a)和图2(b)所示。上位机平板搭载上位机软件,为用户提供与机器人的交互界面,方便用户更好地控制和使用机器人进行各种训练。控制柜内主要布置了机器人的下位机以及激光,并用钢板进行封装,在激光的发射高度处开槽,以便激光在双腿的活动区域进行步态数据的采集。
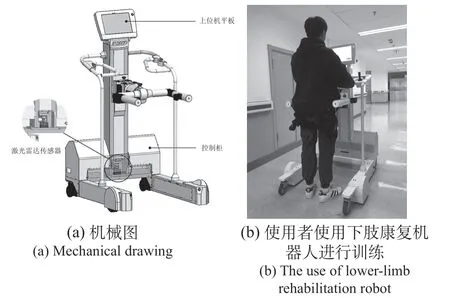
图2 下肢康复机器人Fig.2 Laser position lower-limb rehabilitation robot
1.2 激光雷达传感器测量原理
人的步行过程是一个周期性动作,一个步态周期包含两种时相:支撑相和摆动相。如图3所示,以右脚着地开始到下一次右脚着地结束为一个步态周期,支撑相为右脚脚跟着地到同侧脚尖离地的时间,摆动相是指右脚脚尖离地到同侧脚跟再次着地的时间。划分这两种时相的关键点为脚跟着地点(heel strike,HS)和脚尖离地点(toe off,TO),通过这两个特征点可以计算出步态的主要参数。
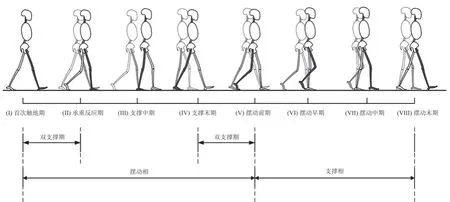
图3 步态周期的相位划分Fig.3 Phase division of gait cycle
本研究设计的步态测量系统主要目的是检测出这两种步态关键点从而求得步态参数,包括步态的时间参数如步行周期、摆动时间、站立时间、双支撑时间以及步态空间参数步长。
激光雷达是一种测距传感器,通过雷达发射系统发送信号,当遇到障碍物时会引起散射,一部分光波会反射到激光雷达的接收器上,根据雷达的测距原理计算就能得到激光雷达到障碍物的距离。图4为激光雷达测量步态参数的原理。将人体下肢模型简化为两对连杆模型,当人在下肢康复机器人上进行行走时,安装在机器人上的激光能够实时地测量出两腿腿径到激光距离的动态变化。将HS定义为距离激光最近点处,TO定义为距离激光最远点处。根据HS和TO时刻的时间即可求出步态的时间参数。在HS和TO时刻将两腿与地面所组成的三角形与两腿与激光发射平面所组成的三角形近似成相似三角形,使用激光测距传感器可以获得步行时两腿的距离差(LDS),激光的安装高度(LHL)和人的骨盆高度(LHP)也可以通过测量工具获得,根据相似三角形原理,可以求得步长(S),公式如下:
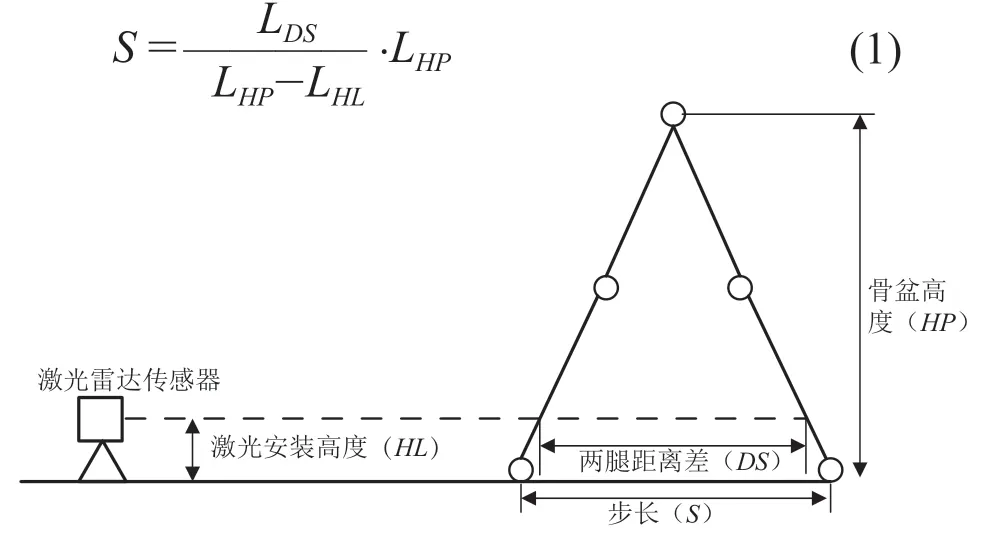
图4 激光测量原理Fig.4 Diagram of laser measurement
1.3 步态算法设计
下面将详细讲述测量算法的细节。为了方便后续计算,将从激光获取到的原始数据预处理成如下格式:

其中,Pij为第j次扫描中的第i个点,xij和yij分别为坐标系的x坐标和y坐标。tj为第j次扫描与零时刻的相对时间,aij为点Pij的角度。Sj为第j次扫描的所有点的集合。
通过聚类算法,将点集分成左右两组,分别为左右两腿的数据点。使用最小二乘法将左右两组数据拟合成腿圆后,计算出其平均半径和圆心,得到圆心点集和平均半径,利用平均半径再反求之前的每一次扫描的圆心,得到最后的圆心轨迹:
其中rj是第j次扫描时利用最小二乘法拟合出的腿圆半径,Cj为第j次扫描时的圆心,N为总扫描次数,R为平均半径,H为N次扫描的所有圆心点集。
如图5所示,左图为单次扫描中激光原始数据拟合成腿圆的坐标图,右图为行走过程中y值变化的总时间序列。HS即为脚最先接触地面的时刻,TO即为脚最后离开地面的时刻,定义HS和TO为y值的最小和最大值的时刻。
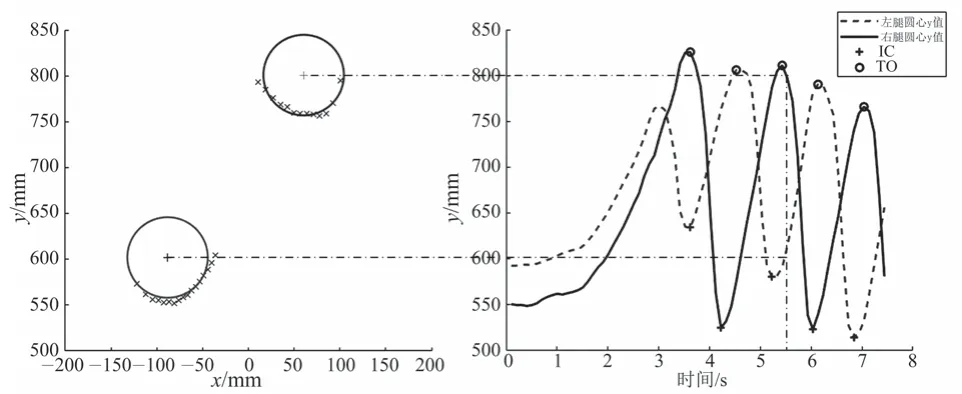
图5 腿圆坐标图及圆心y值的时间序列Fig.5 Shin coordinates and time series of y value of center of circle
根据HS和TO点即可求出步态的时间和空间参数。步行周期定义为同侧脚跟着地到下一次脚跟着地的时间;摆动时间定义为同侧脚的脚尖离地到脚跟着地时间之差;站立时间定义为同侧脚的脚跟着地到脚尖离地时间之差;双支撑之间为两脚同时在地时间,定义为脚跟着地到对侧脚尖离地时间之差;步长定义为脚跟着地到对侧脚跟着地的距离,在本系统中,由于激光是嵌入在下肢康复机器人中跟随机器人移动,因此激光雷达的坐标系并不固定,测量出的胫骨的坐标为相对坐标,激光无法同时测量出两次连续出现HS时刻的位置,在下一次HS时刻到来之时,必然会丢失上一次的HS时刻两脚的位置,在此情形下,无法通过标准方法计算步长,因此使用如下方式进行步长的近似计算,即将第k+1次脚跟着地时刻左右两脚的距离差作为其跨步脚的步长:

2 测量系统有效性验证实验
2.1 实验对象
本次实验共征集了8名健康成年人(5男3女),年龄22~26岁,身高165~181 cm,体重55~75 kg。本次实验均在告知其详细的实验过程后征得其同意。
2.2 实验准备
为了验证提出的步态测量系统的有效性,使用三维光学运动捕捉系统OptiTrack作为参考系统与激光雷达传感器进行同步实验。OptiTrack所采用的摄像机为Prime 17W,测量精度可达亚毫米级别,Prime 17W主要参数如表1所示。动捕的测量原理是摄像机的红外线发光圈发出光线,然后被反光球(Marker点)反射回来就能实现在空间三维坐标中的定位与跟踪。本研究使用12个摄像机,有效测量范围大约为2~3 m。
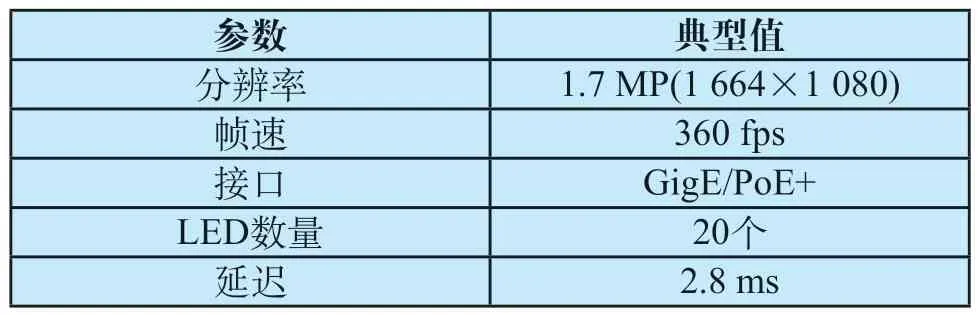
表1 Prime 17 W摄像机相关参数Tab.1 Specifications of Prime 17 W
2.3 实验过程
如图6所示,Marker点分别穿戴在左右腿的脚踝外侧处和膝盖处,可以有效地测量出步态参数[7]。实验过程为:使用下肢康复机器人的行走训练功能时,志愿者在动捕系统的有效测量区域内进行直线行走,激光和动捕进行同步测量,动捕的数据采集与可视化均由动捕配套的Motive软件处理,动捕系统数据导出格式为csv,将其导入至Matlab中计算可得出步态参数,并将结果与激光传感器计算得出的步态参数进行误差对比分析。

图6 Marker点穿戴位置示意Fig.6 Picture of Marker wearing position
3 实验结果与分析
实验结果如表2所示,激光雷达步态测量系统与动捕系统测量出的平均步行周期时间均为 2.5 s,平均摆动时间均在0.7 s左右,平均站立时间均在2 s左右。而正常人自然行走过程中,一个步态周期的时间约为1.14 s,且在一个步态周期内为40%的摆动时间与60%的站立时间[8],两者相比,说明使用下肢康复机器人进行行走训练不同于人的正常行走过程。首先,步态周期时间延长,同样周期内的站立时间延长。其次,激光测量的平均步长比动捕测量结果偏小,与激光传感器计算步长的计算方法有关:由于激光无法直接测量标准步长,只能近似地将下一次对侧脚跟着地时两脚的距离差作为此脚的步长,而标准步长中从前一次脚跟着地到下一次对侧脚跟着地的时间内,前一次脚跟着地的腿径会前移一小段距离,近似步长算法忽略了这一段距离差,因此结果会偏小。
表2 步态参数与动捕系统对比的有效性分析()Tab.2 Validity between proposed and OptiTrack for gait parameters

表2 步态参数与动捕系统对比的有效性分析()Tab.2 Validity between proposed and OptiTrack for gait parameters
激光与动捕测量系统的一致性通过组内相关系数(ICC)和95%的置信区间内得到了验证。一般来说,ICC值大于0.75则说明一致性高,0.4~0.75则认为一致性较好,0.4以下则说明一致性差。可以看到,摆动时间的一致性较好,而其他四个参数的一致性高。结果证明了我们提出的激光传感器的步态测量系统的可行性与准确性。
4 结论
本研究基于下肢康复机器人使用激光雷达传感器设计了一种步态测量的方法,通过将激光的原始数据通过最小二乘法拟合成腿圆后利用HS和TO的特征点来计算步态参数。然后通过与光学运动捕捉系统进行对比实验,在8位健康成年人使用下肢康复机器人进行行走训练时,激光与动捕测量系统同步采集数据,最后进行误差分析与一致性分析。实验结果表明,本系统在康复机器人上测量时,具有较高的精度,且具有成本低、安装方便的优点。下一步我们将此步态测量系统应用于患者测量,以研究本系统对患者数据测量的有效性,并继续优化测量系统的算法,降低误差,以便更好地在康复机器人上进行步态测量。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
汽车观察(2021年8期)2021-09-01
空间科学学报(2021年4期)2021-08-30
恋爱婚姻家庭·养生版(2019年11期)2019-12-20
辽河(2019年7期)2019-09-03
电子制作(2018年18期)2018-11-14
电子制作(2018年16期)2018-09-26
科学之谜(2018年4期)2018-09-17
汽车电器(2017年1期)2017-12-06
家庭医药·快乐养生(2017年4期)2017-04-19
