
用于转轴结构运动康复器械的便携式监控设备
2022-04-11 23:48作者董梁屈云
中国医疗器械杂志 2022年2期
【作者】董梁,屈云
1 华南师范大学 数据科学与工程学院,汕尾市,516600
2 四川大学华西医院 康复医学科,成都市,610041
3 四川大学华西康复医学院,成都市,610041
4 四川省康复医学重点实验室,成都市,610041
0 引言
伴随物联网技术的飞速发展,形形色色具有自动测量、数据处理和网络传输功能的新型医疗器械进入医学领域。这些器械除具有与传统设备相似的诊断、治疗功能外,通常还增添了数据采集、传输和共享等特性[1-5],某些智能化设备甚至可以通过模式识别或数据挖掘技术对诊断结果和治疗方案提出建议[6-12]。与传统器械相比,拥有物联网功能的新型器械更加符合循证医学、数字化医疗发展的潮流,减少了医生的冗余工作,降低了出错的概率,提高了医疗行为的透明度。
在运动康复医学领域,具备物联网功能的新器械却发展缓慢,这主要与这一行业的价格定位有关。用于运动康复的器械往往结构简单、价格低廉,如阻力车、转盘、拉伸训练器等,有的器械价格甚至在百元以内,如果增加物联网功能,将导致价格翻数倍,这对于习惯于使用传统康复器械的医院而言很难通过采购预算。相反,对于昂贵的医学影像设备、生化分析设备、手术设备等,物联网模块所带来的价格增幅几乎可以忽略不计。
在不影响康复功能和价格的前提下,我们提出一种可适配多种传统运动康复器械的物联网外设,这一设备小巧轻便,可随时装配在多种器械上使用,在满足患者训练的同时实现数字化康复。
1 硬件组成
设备的硬件部分主要是四川大学华西医院康复科和百年旭康医疗器械有限公司共同研发的NH121传感器[13],这一传感器在设计之初用于颈椎康复训练,其应用场景,如图1所示,使用者将传感器粘贴在头部的绑带上,依照手机APP显示的视频进行颈部运动训练,传感器采集并发送头部的姿态角,APP里实时显示头部运动状态并对完成情况进行评价。

图1 用于颈椎康复训练的NH121传感器及其使用场景Fig.1 NH121 sensor for cervical vertebra rehabilitation training and its application scenario
用于颈椎康复训练的NH121传感器是一种微机电系统(MEMS)传感器,集成有9轴MPU9250芯片和微处理器,以25 Hz频率采集3个维度的加速度、角速度和磁场强度,经卡尔曼滤波后[14]得到3个维度的姿态角并经由蓝牙发送至接收端。传感器重量仅为58 g,底部安装有魔术贴钩面,适合佩戴在肢体绑带上,也可在不同的设备上固定使用。
2 使用场景
运动康复器械中大量采用了转轴结构,如上肢训练转盘、上肢拉伸训练器、功率自行车、跑步机、四肢力量训练器具等。转轴通常作为动力输出点、调速或传动部件,用以驱动或支撑使用者往复性周期运动。对此类设备进行监控时,只需在转轴处粘贴一片魔术贴毛面即可固定传感器,如图2所示。
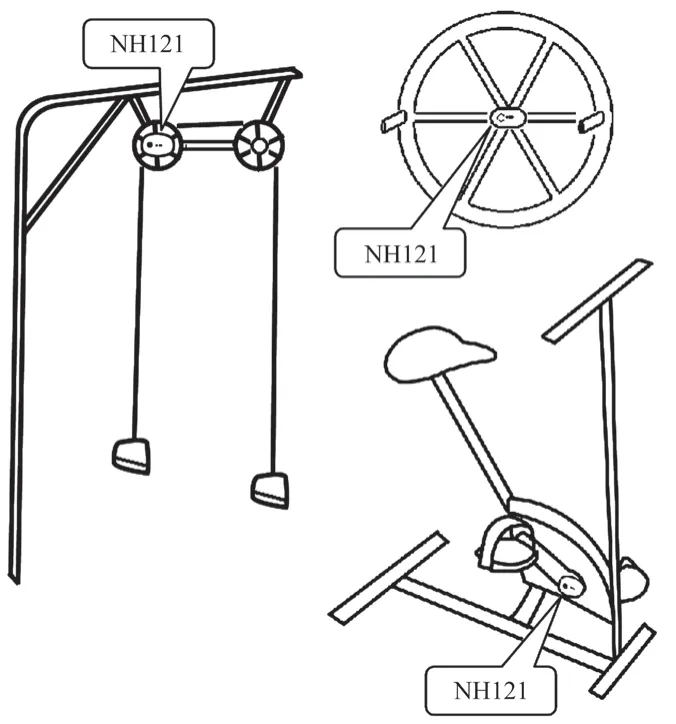
图2 NH121传感器与上肢拉伸训练器(左)、上肢训练转盘(右上)、功率自行车(右下)的固定方式Fig.2 The attachment of NH121 sensor on upper arm stretching device (left),upper arm training wheel (top-right) and cycle ergometer (bottom-right)
在此固定方式下,NH121传感器与器械转轴同步转动,这是一种单自由度的旋转运动,比图1所示颈椎康复的运动模式要简单很多(颈椎的运动涉及3个自由度)。在这种运动模式下,传感器法向的顺/逆时针转动角度、速度和转动周数将作为后续软件的主要处理对象。
3 设备监控APP
原颈椎康复训练系统已经设计开发了传感器硬件、通信协议和卡尔曼滤波算法,在此基础上结合以上使用场景进行二次开发,目标产品是一款名为设备监控APP的软件,主要用于表1所示的四类设备。不同的康复设备提供不同模式的运动训练,其所需呈现的数据大不相同。例如,对于图2所示上肢训练转盘,主要关注顺、逆时针转动的角度和次数;对于上肢拉伸训练器,主要是左右把手向上、向下滑动的距离和速度。因此设备监控APP需针对不同的设备进行设置,并将传感器输出的姿态角转换为可解读的参数。
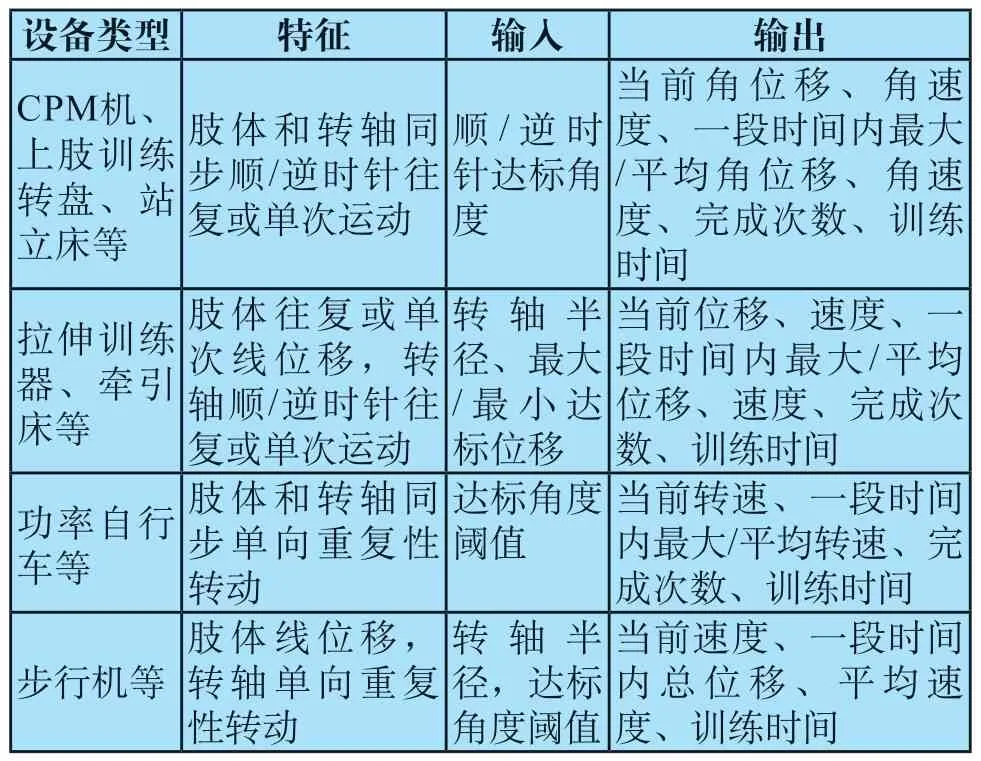
表1 设备监控APP适用的4类设备Tab.1 Four types of equipment applicable to the device monitoring APP
表1“特征”一栏说明肢体与传感器之间的运动关系,“输入”一栏所示达标角、达标位移等表示只有超过此参数设定阈值才计为一次完成。以上肢训练转盘为例(图2右上),康复医生关注的运动参数是患者手臂推动转盘转动的角度,放置于转轴处与转盘同步转动的传感器可直接输出这一角度。“输入”一栏由APP提供交互页面手动设置阈值,例如设置逆时针转动角度>30°且顺时针转动角度<-30°方计为一次完成。在运行过程中,APP以25 Hz实时读取传感器输出值,并转换为表1“输出”一栏所示参数,再根据输入的阈值计算或判断完成情况。以功率自行车为例,APP将传感器输出的转动角度转换为当前转速,每次跨越达标角度阈值(如150°)后运转次数加1,每400 ms更新于图3所示页面。

图3 设备监控APP呈现的设备参数Fig.3 Parameters presented by the device monitoring APP
设备监控APP也提供了账号管理功能,将监控数据与患者关联起来。为患者建立账号后,就可以查询此患者在指定时间使用某一设备进行训练的详细情况,如图4所示。内容包含总使用时间、完成次数及表征训练完成质量的各项量化值。

图4 根据患者ID、设备ID、时间获取的查询结果Fig.4 Query result for the specified patient,device and time duration
4 实验结果
本研制设备在交付时采用深圳欧度利方科技有限公司的酷比魔方iPlay10 Pro平板电脑[15]作为设备监控APP的载体,每台平板与4个NH121传感器连接,可同时监控4台运动康复器械,平板与传感器的有效通信范围在10 m以内。2套设备部署在华西医院康复科PT治疗大厅,1套部署在康复科病房,在2个月的测试时间里,对30多台康复器械(包括功率自行车、上肢训练转盘、CPM机、拉伸训练器)进行了监控测试,总监控时长接近2000 h。
监控对象中功率自行车自带测速表盘,对比结果表明监控设备对其转动次数和一分钟内平均转速的测量精度接近100%,只在骑行起始和终末阶段有少许不同,主要源于APP的算法与测速表盘对于转周始末位置的设定有所差异。
所监控的CPM机也自带有角度显示,将CPM机牵伸范围中点设置为0°,在此位置校准传感器,设置CPM机依次屈30°返回0°再伸30°,经100次重复屈伸实验后,对比结果显示监控设备对屈伸角度的实时测量值与CPM的显示值平均误差为2.5°。
所监控的拉伸训练器(如图2左所示)没有位移显示功能,实验中采用手工测量的方法,左侧手柄和右侧手柄分别下拉移动80.0 cm,并与监控结果比较,经50次比对统计后,两者的平均误差为6.3 cm,误差为7.9%。
所监控的上肢训练转盘(如图2右上所示)也没有角度显示功能,实验中也采用手工测量的方法,分别在转盘上标记0°、顺时针-100°和逆时针100°位置,在0°处校准传感器,分别顺、逆时针转动转盘至±100°处,与监控显示角度比对,经50次实验统计后得到平均误差为3.7°。
以上实验中监控设备对角度的测量精度均符合产品标准[16]所声明的±5°以内,拉伸训练器线位移的测量误差主要是因为转轴与手柄连线之间存在滑动,且手柄连线有一定弹性。经康复医生评估,以上4种设备的监控结果都满足器械训练的精度要求。此外,当一台平板电脑连接4个NH121传感器同时监控4台设备时,设备监控APP页面的数据延迟小于300 ms,实时性有很好的保障。
康复医生和治疗师对设备的使用评价也作为实验的一部分,在实验期间为使用华西医院康复科设备的63名患者创建了病人账号,康复医生和治疗师实地配置NH121传感器,操作设备监控APP查看监控结果、查询患者使用情况,他们的评价结论包括:①在设备转轴处粘贴不干胶魔术贴毛面即可固定NH121传感器,使用过程中极少出现传感器脱落的情况;②设备监控APP所显示的实时参数与设备运转状况同步,目测监控准确度很高;③即使NH121传感器的固定位置和角度有一定误差,也可以通过设备监控APP校准传感器,对监控结果的影响很小;传感器较少出现连接中断故障,如出现中断,大多数情况都会很快自动重新连接;④每一个患者使用不同设备进行康复训练的数值化结果都可以很方便地查询,这些结果可以用来评价患者的运动功能,也可以作为制定康复训练计划的依据;⑤不使用摄像头,不侵犯患者隐私,患者本人和家属没有任何负面评价。
5 结论
本研究所提出的运动康复器械监控设备是在已有传感器基础上的一个二次开发项目,实现了在不替换已有设备、不影响正常使用的情况下,将物联网所监控的对象扩展到运动康复器械上。所使用的NH121传感器成本在百元左右,非常廉价,适合在各个级别医院康复科里推广使用。在华西医院康复科进行的实验性应用证明了此监控设备可以准确地获取患者借助器械完成康复训练的各项数据,一方面可以帮助医院管理人员掌握康复器械的性能和使用率,另一方面也可以为康复医生和治疗师提供康复患者训练的量化数据,实现数字化康复,是“物联网+康复医学”领域的一次有意义的探索。下一步工作集中在通信协议和算法的设计和开发上,将可监控的范围由院内拓展到社区环境,实现对家用运动康复器械的远程监控。
猜你喜欢
护理与康复(2022年6期)2022-11-25
实用手外科杂志(2022年2期)2022-08-31
作文小学高年级(2022年3期)2022-04-20
中华养生保健(2021年18期)2021-02-13
甘肃教育(2020年18期)2020-10-28
新传奇(2019年40期)2019-11-01
福建中学数学(2018年1期)2018-11-29
37°女人(2017年8期)2017-08-12
滇池(2017年7期)2017-07-18
意林(2015年20期)2015-10-21
