
触摸远隔重洋的你解密触觉互联网
2015-09-10 07:22技术宅
电脑爱好者 2015年17期
技术宅
知识扫盲——认识触觉互联网
触觉互联网,顾名思义就是可以感受触觉的互联网。平时我们借助互联网可以传输语音、视频这类文件进行远程交流,这些就类似语音视频互联网,而触觉互联网则是传输触觉数据的一种交流方式,通过传输触觉实现彼此更高层次的远程交流。以前音视频无法实现类似见面握手这类触觉效果,而现在基于高速宽带存在的触觉互联网则可以让网上的会面如亲临实境(图1)。
远程触摸的背后
那么这种远程触觉效果到底是怎么样实现的?了解虚拟现实设备的朋友都知道,通过这种设备我们可以获得极度真实的虚拟触觉体验,比如各种虚拟的点击可以获得真实的触觉反馈。触觉互联网的原理与之类似,不过因为是远程触觉,它还要借助高速宽带实现触觉数据的传输。
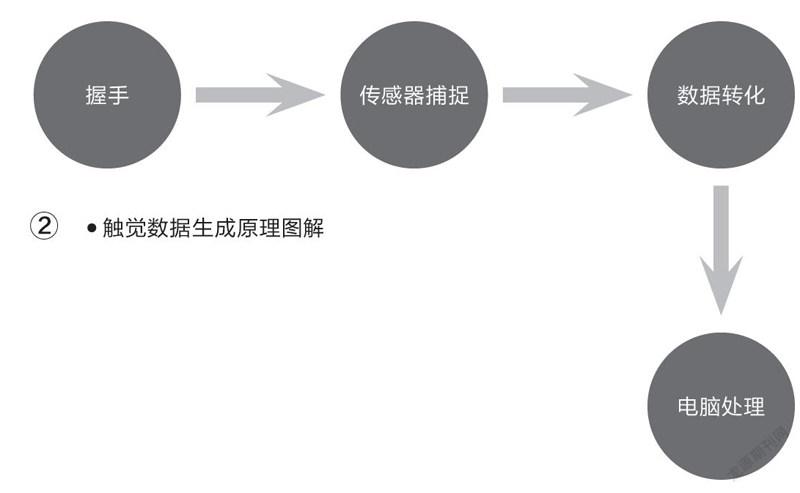
因为触觉是抽象感官的数据,要实现其触觉捕捉,我们首先要实现触觉数据化的转化操作,也就是说传输到远程的触觉数据先要在本地捕捉生成,并且可以被电脑识别。大家知道,通过视频捕捉、语音录制等工具,我们可以很轻松地生成多媒体数据。同样的要实现远程触觉,我们也需要对触觉数据进行捕捉。视觉捕捉大多是通过传感器实现的,比如要让用户有握手的触觉,我们就可以通过传感器捕捉这种触觉。这样当用户的手和传感器“握手”连接的时候,传感器就会捕捉到握手数据,同时将它转化为电脑可以识别的数字化数据,这样这个握手行为就转化为电脑数据了,类似我们使用录音软件,将人的语音输入转化为语音数据(图2)。
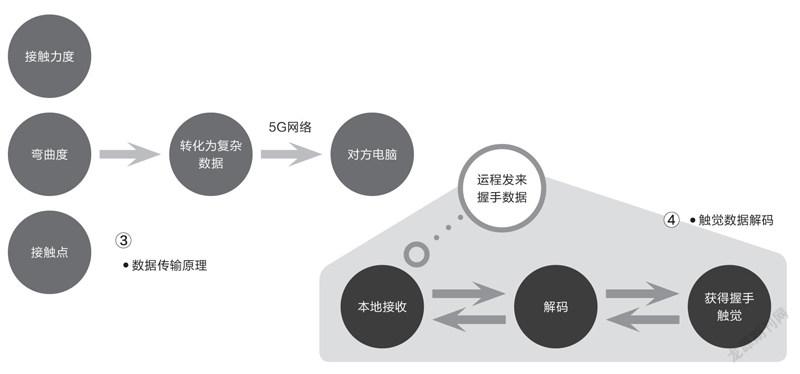
完成本地数据的采集后,这些数据就可以通过互联网进行传输。不过触觉数据和常规的文本、视频数据不同,它的数据量要比这些文件多得多。比如一个简单的握手操作,因为需要获得类似真实握手的感觉,传感器需要获取手掌整个触觉的所有数据,包括力度、所有接触点、关节弯曲度等,这些数据转化为电脑可识别的二进制数据后就变得非常庞大,而且这种触觉需要让对方实时感受到,因此要将这些数据在网络传输就必须借助高速的网络。5G的无线网络最高的速度可以达到每秒10GB,只有这种高速宽带才有可能实现触觉数据的传输和不延迟(图3)。
远程用户接收到触觉数据后需要进行解码,这样用户才能获得触觉感觉。这个解码操作就类似收到对方QQ发来的视频数据,通过本地电脑的视频解码器才能进行播放。触觉数据的解码同样需要解码以后才能让我们有握手的触觉体验。解码也是借助传感器实现,当我们在电脑上接收到远程发来的触觉数据后,通过本地传感器将数据解码。比如可以通过特制的触觉手套,这样电脑在收到对方发来的握手数据并解码后,我们通过触觉手套就可以实时获得对方的握手感觉,同样的我们的握手数据也会通过高速网络传输到对方的电脑上并进行解码,从而实现触觉的远程传输和体验(图4)。
不仅仅是触觉——触觉互联网改变生活
触觉互联网可以实现远程触摸感觉,这样原来我们日常生活中需要触摸才能实现的操作,通过电脑+高速宽带就可以轻松实现。这种技术的出现必然会给我们的生活带来更多的便利。
原来很多需要触摸才能学好的技能如学习钢琴,传统的方法是在老师的指点下触控按键学习。随着触觉互联网的普及后,现在远在千里之外的老师就可以给我们现场效果般的指点。因为通过传感器,我们的按击效果可以同步实时传输到远程老师的电脑上,同样远程老师正确的指法点击也可以让我们实时感觉到。触觉互联网让各种技能性远程学习变得更为便利,彻底突破原来的地域限制。
对于商家而言,这种远程触摸体验也可以让我们获得更好的购物体验。比如出售的是一些需要触摸才能获得更好体验的商品如一些衣服,只有触摸后才能感觉布料材质的好坏。现在触觉互联网的普及后,购买这些衣服就可以“先摸”后买,再也不怕买到看上去款式新颖,但是材质却一塌糊涂的衣服了。
触觉互联网的起源
触觉互联网(Tactile Internet)一词最先为德国德累斯顿技术大学教授Gerhard Fettweis所提出。Gerhard教授和他的团队早在2012年便开始思考如何实时远程触控机器人了。因为机器人的控制除了复杂的指令控制外,通过触摸控制可以获得更好的操控效果。如通过点击机器人某一部位的传感器传输指令,这样不仅操作更简单,而且也便于机器人更精准的接收。不过触觉互联网需要传输海量数据,所以也只有5G网络的高传输速度才能让它变为可能。英国科学家Dohler对触觉互联网进行了更深一步的研究,他在巴塞罗那召开的世界移动通信大会上作了相关演讲,“触觉互联网”迅速成为热词。之后瑞典通讯业巨头爱立信和三星也相继投入重金进行研究,使之逐渐成为当今远程触控的热门科技。
猜你喜欢
小猕猴学习画刊(2022年9期)2022-11-04
环球时报(2022-08-22)2022-08-22
中国石油石化(2022年12期)2022-07-16
小学生优秀作文(趣味阅读)(2022年6期)2022-06-24
海外星云(2021年6期)2021-10-14
中国外汇(2019年19期)2019-11-26
家庭影院技术(2018年11期)2019-01-21
家庭影院技术(2018年11期)2019-01-21
特别健康(2018年3期)2018-07-04
自动化学报(2016年5期)2016-04-16
