仿生风传种子三维微电子飞行器
2022-04-08 08:09:18宋吉舟
力学进展 2022年1期
宋吉舟
浙江大学工程力学系, 杭州 310027
浙江大学浙江省软体机器人与智能器件研究重点实验室, 杭州 310027
浙江大学流体动力与机电系统国家重点实验室, 杭州 310027
微飞行器是一种像小型鸟类或昆虫一样在低雷诺数下工作的飞行器, 具有体积小、隐蔽性好等特点, 是未来飞行器的重要发展方向之一. 传统微飞行器飞行通常基于主动驱动的方式, 即扑翼、旋翼、喷气等. 这类主动驱动方式可控性强, 但由于微飞行器体积限制, 其所携带的能源受限, 导致飞行时间较短、巡航范围较小(Wood 2008). 此外, 该类器件小型化集成难度极大, 在一定程度上限制了该类器件的广泛应用. 近日, 美国西北大学John A. Rogers、黄永刚课题组、清华大学张一慧课题组和伊利诺伊大学香槟分校Leonardo P. Chamorro 课题组合作, 以风传植物种子为灵感, 设计了一种风力被动驱动的“种子”飞行器. 植物种子历经自然选择优化, 其三维结构可充分利用空气作用力, 实现缓慢滞空下落, 从而随风自由飞行几十、甚至几百公里(Cummins et al. 2018, Lentink et al. 2009, Nathan et al. 2002). 研究者通过模仿这类风传种子, 研发了一类以风为被动驱动力的微飞行器(图1(a)), 极大地减小了飞行器飞行所需功耗, 实现了长时滞空飞行(Kim et al. 2021). 论文以“Three-dimensional electronic microfliers inspired by wind-dispersed seeds”为题于2021 年9 月28 日发表在《Nature》杂志上 (Kim et al. 2021) .
这类微飞行器采用力学屈曲组装成型的三维薄膜结构(图1(b)), 即在预拉伸的弹性基底上有选择地粘接二维薄膜预构型, 而后通过释放弹性基底的预应变实现二维薄膜结构的压缩屈曲,进而形成三维构型(Xu et al. 2015). 研究者采用形状记忆聚合物作为二维薄膜的材料, 进而通过控制温度实现三维构型脱离基底后依然保持其三维形貌. 薄膜结构的重量极轻, 且三维构型在下落时可保证其迎风面尽可能垂直于薄膜表面, 因此可以最大化下落风阻, 实现较小的终端速度(图1(c)). 终端速度即物体在空气中达到匀速下落状态下的速度. 值得一提的是, 这种力学屈曲组装三维成型方法与传统二维电子制造工艺完美兼容, 这为在三维结构上集成电子电路器件埋下了伏笔. 此外, 采用这种成型方案可以实现多尺度、大规模三维结构的制造, 这为将来微飞行器的产业化生产奠定了基础(Zhang et al. 2017).
该工作着重介绍了这种被动驱动微飞行器的下落机理, 将复杂的三维构型简化为离散的叶片, 从而构建了微飞行器空气耦合动力理论模型, 并通过数值仿真与下落实验进行验证. 该类被动驱动飞行器的尺度效应非常明显(图1(d)): 在小尺度下 (如直径小于1 mm, 终端速度约0.3 m/s) , 微飞行器工作雷诺数较低 (小于4) , 周围流场接近斯托克斯黏性流体, 其终端速度依赖于空气的动黏度且与微飞行器重量成正比; 在大尺度下 (如直径大于40 mm, 终端速度约1.2 m/s) , 微飞行器工作雷诺数较高 (大于3000) , 其终端速度依赖于空气密度, 且与微飞行器重量的平方根成正比. 这种尺度变化所带来的性能变化会给这类微飞行器带来全新的应用前景, 例如,小尺度微飞行器在极高海拔下依然具有较小的终端速度(图1(e)), 因此可作为微型“卫星”长时间悬浮在高空大气, 实现低成本高空探测、信息传输等功能.
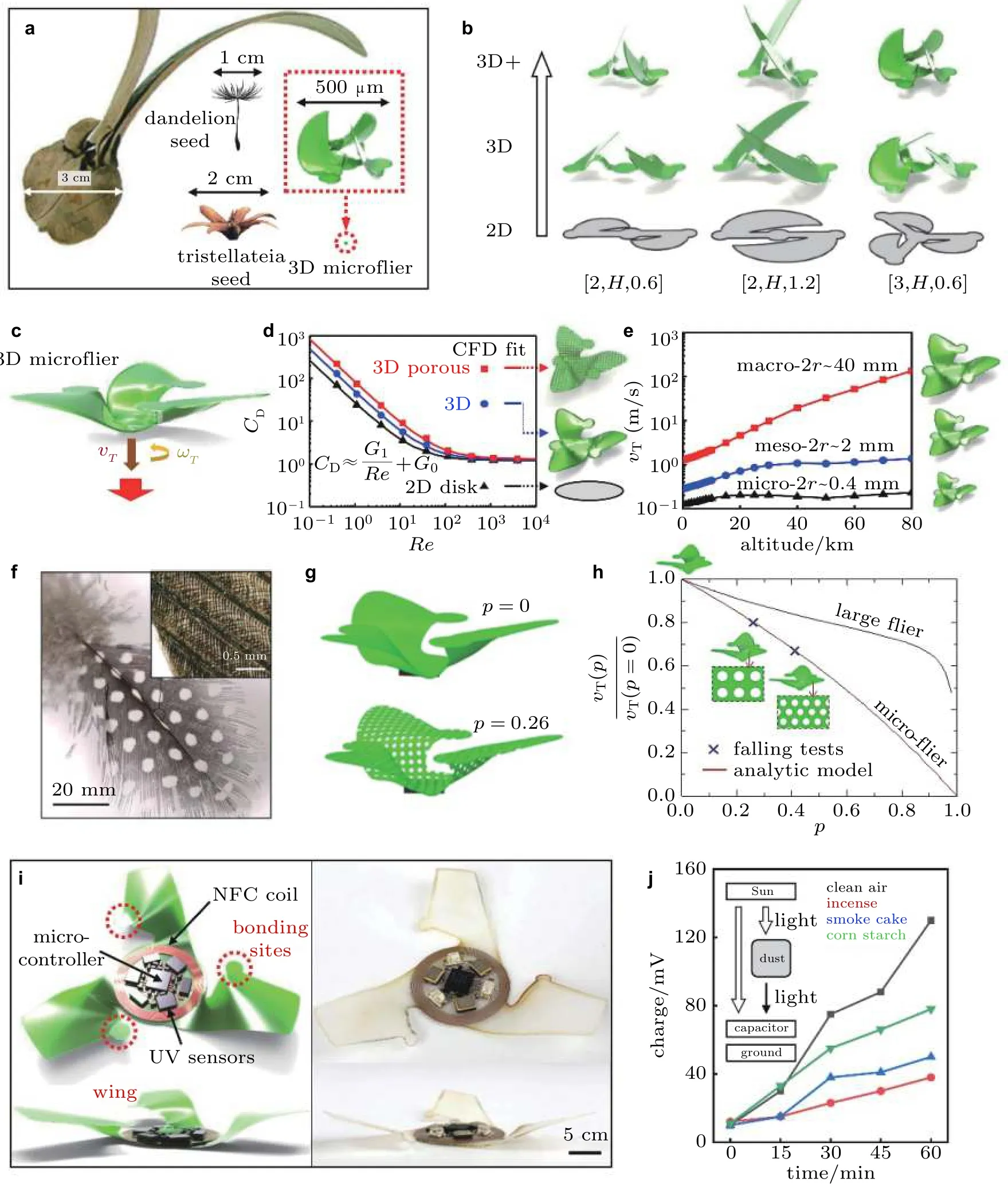
图 1 (a)风传植物种子与“种子”飞行器;(b)力学屈曲组装三维微飞行器结构;(c)薄膜结构飞行器下落示意;(d)飞行器对照经典圆盘结构的阻力系数与雷诺数关系;(e)不同尺度飞行器终端速度与海拔关系;(f)羽毛及其微结构,局部放大图展示纤毛结构;(g)多孔结构微飞行器;(h)孔隙率对终端速度影响;(i)集成电子电路的功能型飞行器;(j)空气污染监测功能示例
终端速度是该类飞行器的重要参数, 终端速度越小则其滞空时间越长. 通过数值模拟与理论计算, 探讨了通过优化其三维构型, 进一步减小飞行器终端速度的可能性. 对于大尺度飞行器而言 (直径大于4 cm) , 其三维结构对终端速度影响显著, 即可通过优化叶片倾角、改变叶片形状(如弯曲叶片) 等方式优化其终端速度. 然而, 这种方式对小尺度飞行器 (直径小于1 mm) 而言效果甚微, 因为小雷诺数下边界层较厚, 外界流场不能捕捉到三维结构改变所带来的影响. 对于小尺度飞行器, 研究者以羽毛为灵感, 巧妙地采用了增加孔隙的方式在不影响阻力系数的前提下降低飞行器自身重量, 从而优化终端速度. 羽毛并非一片整体, 而是由许多细小的纤维组成的(图1(f)),这种结构可以极大减小羽毛的自身重量, 同时不影响其气动性能. 这种孔隙率的结构(图1(g))可以进一步降低微飞行器的终端速度约25%, 但这一方案对大尺度飞行器无效, 原因是在大雷诺数下边界层尺度小于孔隙大小, 其气动性能也会相应降低(图1(h)). 这些优化方案为将来微飞行器的设计提供了指导思路. 此外, 高精度的流场成像具象了垂直风洞实验中被动驱动飞行器的流场, 进一步验证了数值仿真与理论模型的结果.
如前所述, 该类飞行器的力学屈曲组装方案使得集成功能电子电路变为可能(图1(i)). 研究者通过集成不同的材料与功能性电路, 针对不同应用场景实现了诸如空气PH 值检测、大气污染物探测等功能(图1(j)). 该类飞行器也可作为未来物联网的“种子”节点, 像风传种子一样在城市、大气等复杂、广阔的空间中广泛播撒, 实现诸如传染病病毒监测、任务探测等功能. 未来,一方面可通过结合相关的大规模转印、集成与制造技术, 探索实现该类飞行器的大规模制造(Luo et al. 2019, Wang et al. 2020), 另一方面, 通过引入叶片的智能控制, 可以根据流场和风速, 调整飞行器姿态, 进一步提高其飞行稳定性.
猜你喜欢
凤凰动漫(军事大王)(2022年1期)2022-04-19 11:35:10
中学生数理化(高中版.高考理化)(2021年12期)2021-03-08 00:48:08
电子制作(2018年2期)2018-04-18 07:13:25
北京航空航天大学学报(2017年2期)2017-11-24 05:24:24
北京航空航天大学学报(2017年10期)2017-04-20 08:51:23
西北工业大学学报(2015年4期)2016-01-19 03:31:38
西北工业大学学报(2015年4期)2016-01-19 03:31:36
民用飞机设计与研究(2015年3期)2015-12-07 12:09:29
小朋友·快乐手工(2015年5期)2015-06-06 00:46:12
航天返回与遥感(2014年4期)2014-07-31 17:47:47