
求解非单调变分不等式的一种修正二次投影算法
2022-03-30 02:53蒋铃钰叶明露
西华师范大学学报(自然科学版) 2022年1期
蒋铃钰,叶明露
(西华师范大学 数学与信息学院,四川 南充 637009 )
本文考虑的经典变分不等式的模型VI(F,C)如下:求x*∈C使得
〈F(x*),y-x*〉≥0,∀y∈C,
(1)
其中,C⊆Rn是闭凸集,F∶C→Rn是一个连续映射。其解集记为S。用〈·,·〉和‖·‖来分别表示Rn中的内积和范数。变分不等式在交通、经济、微分方程及优化等领域都有较为广泛的应用[1-4]。投影算法是求解VI(F,C)的一种简单有效的算法。因此,本文主要关注投影类算法来求解VI(F,C)问题。Goldstein[5]和Levitin-Polyak[6]介绍了一种简洁的投影算法,其算法如下:
xk+1=PC(xk-βF(xk)),
(2)
其中,β>0为步长。该算法的全局收敛性需要映射F在C上Lipschitz连续且满足强单调性的条件。但强单调的假设条件限制了算法(2)的运用。因此为了将算法(2)中映射F的强单调性削弱为单调性或者伪单调性,Korpelevich[7]提出了一种新的外梯度投影算法,其结构如下:
(3)
尽管该算法在每次迭代中需要向可行集C作两次投影,但该算法的收敛性只需要映射F在C上Lipschitz连续且伪单调。因此,外梯度投影算法受到了众多学者的关注和研究[8-10]。为了削弱映射F的Lipschitz连续性,Iusem[1]引入了Armijo型线性搜索。这不仅可以得到一个更长的步长,还可将映射F在C上的Lipschitz连续削弱为连续,详细发展过程还可参见[2-13]。最近,Ye和He[14]在式(1)的对偶变分不等式的解集
(4)
非空的假设条件下,提出了一种二次投影算法,并证明了该算法的全局收敛性。因为该算法没有假设F具有任何的单调性,从而适用于求解SD≠∅的非单调的变分不等式问题。该算法的新迭代点计算如下:

Konnov[15-16]提出了求解伪单调VI(F,C)问题的Combined relaxation methods算法。其新迭代点xk+1由当前迭代点xk向能严格分离当前迭代点和解集S的超平面作投影来生成,这使得
dist(xk+1,S)≤dist(xk,S),∀k,

xk+1=PC∩Ck(xk),


xk+1=PC∩Ck(xk),



1 预备知识
首先回顾一些投影算子的定义、性质及相关结论。

引理1[14]设C是Rn中的闭凸集,F:C→Rn是一个连续映射,则SD⊂S。
引理2[19]设K是Rn中的非空闭凸集且xk+1=PK(xk),则对∀x*∈K,都有以下不等式成立:
‖xk+1-x*‖2≤‖xk-x*‖2-‖xk+1-xk‖2。
定义2对∀μ>0,记问题(1)的自然残差映射为rμ(x)∶=x-PC(x-μF(x))。
引理3[13]设μ>0,则x*∈S⟺‖rμ(x*)‖=0。
引理4[19]设x∈C且μ>0,则有以下不等式成立:〈F(x),rμ(x)〉≥μ-1‖rμ(x)‖2。
定义3设映射F:C⊂Rn→Rn,称F在C上Lipschitz连续,若对任意的x,y∈C都存在M>0使得‖F(x)-F(y)‖≤M‖x-y‖。
引理5[19]设C是Rn上的闭凸集,h(x)是Rn上的实函数,记K∶={x∈C:h(x)≤0}。若K非空,h在C上Lipschitz连续且模为θ>0,则对∀x∈C,都有以下不等式成立:dist(x,K)≥θ-1max{h(x),0}。
2 算法及初步结果
先给出改进的二次投影算法,称其为算法1,如下:
算法1选取x0∈C为初始点,参数σ∈(0,1),γ∈(0,1)且μ∈(0,σ-1)。设k=0。计算
zk∶=PC(xk-μF(xk))。
步骤1计算rμ(xk)=xk-zk。若rμ(xk)=0,则停止;否则,转到下一步。
步骤2计算yk=xk-ηkrμ(xk),其中ηk=γmk,而mk是使得以下不等式成立的最小非负整数m:
总之,我们的研究结果表明:按规律联合按需服用西地那非能安全有效地改善合并PE的ED患者的勃起功能,如勃起功能获得改善,多能使患者的PE得到明显改善。PE未能改善的患者多为中重度ED,虽然这部分患者IELT无明显改善,但是却能显著改善他们的配偶性生活满意度。
〈F(xk)-F(xk-γmrμ(xk)),rμ(xk)〉≤σ‖rμ(xk)‖2。
(5)

令k=k+1,并返回步骤1。
在后文中,只假设以下2个条件成立:A)F:C→Rn是连续的,C⊂Rn是非空闭凸集;B)SD≠∅。

首先,说明步骤2中的线搜索成立。
引理6对∀k∈N,都存在一个非负整数m满足(5)式。
〈F(xk0)-F(xk0-γmrμ(xk0)),rμ(xk0)〉>σ‖rμ(xk0)‖2。
(6)
又因为F是连续的,γ∈(0,1),所以
〈F(xk0)-F(xk0-γmrμ(xk0)),rμ(xk0)〉→0(m→∞)。
因此,由(6)式可得0≥σ‖rμ(xk0)‖2。又因为σ∈(0,1),故只有‖rμ(xk0)‖=0,这与步骤1中‖rμ(xk0)‖≠0矛盾。故对∀k∈N,都存在一个非负整数m满足(5)式。
接下来,讨论算法1中的超平面的性质。

(7)
由(5)式和引理4可得
ηk〈F(yk),rμ(xk)〉≥ηk〈F(xk),rμ(xk)〉-ηkσ‖rμ(xk)‖2≥ηkμ-1‖rμ(xk)‖2-ηkσ‖rμ(xk)‖2,
(8)
因此结合(7)式和(8)式可得
(9)

=〈μF(yk)-μF(xk)+rμ(xk),rμ(xk)〉
=μ〈F(yk),rμ(xk)〉-μ〈F(xk),rμ(xk)〉+‖rμ(xk)‖2,
(10)
由(5)式可得
μ〈F(yk),rμ(xk)〉≥μ〈F(xk),rμ(xk)〉-μσ‖rμ(xk)‖2,
(11)
进而由(10)式和(11)式有
≥μ〈F(xk),rμ(xk)〉-μσ‖rμ(xk)‖2-μ〈F(xk),rμ(xk)〉+‖rμ(xk)‖2
=(1-μσ)‖rμ(xk)‖2>0。
2)因为yk=xk-ηkrμ(xk)=(1-ηk)xk+ηkzk,且xk∈C(∀k),故yk∈C(∀k)。因此,可知
(12)
又由xk∈C及SD的定义可知
(13)
另一方面,有
(14)
其中的不等式由(12)式可得。因此,由(13)式和(14)式可得
(15)
进而由(15)式可得
(16)
又由引理4可得
-μ〈F(xk),rμ(xk)〉≤-μ·μ-1‖rμ(xk)‖2。
(17)
因此,结合(16)式和(17)式可得



3 收敛性分析



定理1若SD≠∅,则由算法1所生成的无穷序列{xk}收敛到SD≠∅的一个解。

(18)
因此序列{‖xk-x*‖2}是一个递减序列,从而收敛且序列{xk}有界。对(18)式取极限(k→∞)可得
(19)
因为序列{xk}有界,则∃M>0使得‖xk‖≤M。又因为在有限维空间中连续函数映射的有界集为有界集,因此由F的连续性可得序列{F(xk)}有界,则∃M1>0使得‖F(xk)‖≤M1。故由范数的三角不等式有‖xk-μF(xk)‖≤‖xk‖+μ‖F(xk)‖≤M+μM1≤2M2,其中M2=max{M,μM1},因此可以得到序列{xk-μF(xk)}有界。再由zk=PC(xk-μF(xk))和投影算子的连续性可知序列{zk}有界,即∃M3>0使得‖zk‖≤M3。因为rμ(xk)=xk-zk,则由范数的性质有‖xk-zk‖≤‖xk‖+‖zk‖≤M+M3≤2M4,其中M4=max{M,M3},因此可以得到序列{rμ(xk)}有界,即∃M5>0使得‖rμ(xk)‖≤M5。又因为yk=xk-ηkrμ(xk),其中ηk=γm,γ∈(0,1),则ηk≤1,所以ηk‖rμ(xk)‖≤M5,因此由范数的性质有‖xk-ηkrμ(xk)‖≤‖xk‖+ηk‖rμ(xk)‖≤M+M5=2M6,其中M6=max{M,M5},故序列{yk}有界。又因为序列{xk}和{yk}有界,且在有限维空间中连续函数映射的有界集为有界集,因此由F的连续性可得序列{F(xk)}和{F(yk)}有界。又由引理10和(19)式可得
(20)

(21)
(22)

〈F(xkj)-F(xkj-γ-1ηkjrμ(xkj)),rμ(xkj)〉>σ‖rμ(xkj)‖2,
(23)
由假设条件A)和rμ(xk)的连续性,在(23)式中令j→∞有
(24)
4 数值实验
用2个数值实验来测试算法1,工具是R2018a版本的MATLAB和华硕笔记本(CPU:inteli7-4710HQ)。选取10-4作为停机准则,即当‖r(x)‖≤10-4时,程序终止。为了方便描述,把文献[14]的算法2.1记为算法2,把文献[17]的算法3.1.2记为算法3,把文献[18]的算法1记为算法4。其中算法1的参数取为:σ=0.5,γ=0.5,μ=1.6;算法2的参数选取为:σ=0.99,γ=0.4,μ=1;算法3的参数取为:σ=0.5,γ=0.5,μ=1,α=0.1,β=0.02,ω=0.1;算法4的参数取为:σ=0.3,γ=0.5,μ=1.4。
例1考虑n维非单调变分不等式问题
其中,SD={(-1,…,-1)}且S={(x1,…,xn):xi∈(-1,0),∀i}。并且x1→x2在[-1,1]上是拟单调的,可参考文献[20]定理3.1和例3.1,而n≥2时F在C上不是拟单调的。
在例1中,首先通过计算PC(x0)随机生成8个初始点,其中x0是随机生成的向量。然后使用算法1、算法3和算法4分别对初始点不同的例子1分别求解8次。最后,统计例1中算法8次计算后的总迭代次数的平均值iter,总函数值计算次数的平均值nf和总的耗费时间的平均值time(单位:秒)。在表1中报告了数值实验的结果。

表1 例1的数值实验结果

在例2中分别选取不同的初始点,然后对算法1、算法2和算法4进行测试,将三者的数值实验结果进行比较。在表2中报告了数值实验的结果。
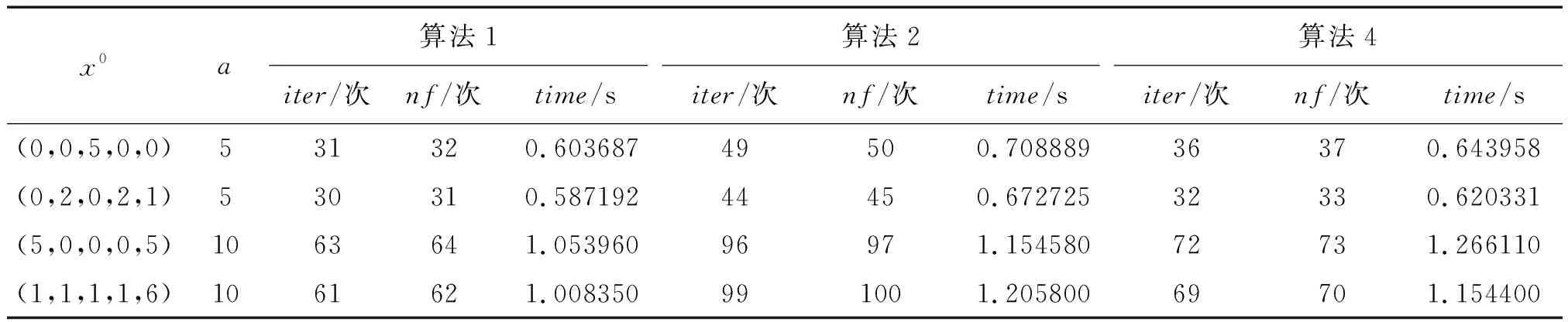
表2 例2的数值实验结果
通过表1和表2的数值实验结果可以发现,算法1的迭代次数和运行时间都少于算法2、算法3和算法4,这说明了算法1在一定程度上优于已有算法。
猜你喜欢
延安大学学报(自然科学版)(2020年4期)2021-01-15
数学物理学报(2020年3期)2020-07-27
数学杂志(2020年3期)2020-07-25
数学物理学报(2019年6期)2020-01-13
数学物理学报(2019年6期)2020-01-13
数学物理学报(2019年5期)2019-11-29
数学物理学报(2019年3期)2019-07-23
福建中学数学(2016年4期)2016-10-19
中国市场(2016年45期)2016-05-17
