
轨道几何形位的纠正探析
2022-03-30 08:20:28孙艳英
中国储运 2022年4期
文/孙艳英
为保障城市轨道交通列车运行的平稳性和安全性,普遍采用各种技术手段对轨道几何状态进行监控。对线路进行全方位检测,保障轨道几何形位的平顺性和稳定性,是保证城市轨道交通系统安全运营的关键。轨道不平顺检测能科学引导线路维护工作,是确保乘客安全、行车安全、提高线路运行质量的基础。城市轨道交通系统维修部门必须对轨道几何形位的偏移进行纠正,并作为日常线路维修养护的重要事项来抓。通过对相关文献进行研究,对几何不平顺的纠正措施及设备进行了研究;对激光拨道系统原理、拨道几何原理以及拨道补偿原理进行了设计分析。文章可作为从业人员和研究人员的参考资料,为今后的研究方向提供一定的借鉴意义。
轨道结构的平顺性影响着车轮、钢轨之间的关系,轨道结构平顺与否决定着轨道的质量状态,平顺性与否是表明轨道载荷水平和整体水平的指标,是维修部门落实维保计划的依据。为了确保列车运行的舒适性、安全性和平稳性,轨道结构应保证能提供较高平顺性的基础。轨道不平顺将对行车安全和平稳有影响,车轮和钢轨间的动力作用增大,维修时间、成本加大,列车和线路设备的寿命将缩短。如果轨道不平顺不能及时的诊改维护,轨道结构病害将越来越严重。所以,城市轨道交通系统维修部门应对轨道几何形位的不平顺进行纠正。
1.轨道几何形位纠正的设备。
轨道几何形位要素都各有标准值及其容许偏差,在设置线路时按照标准值进行设置,后期随着列车运行及线路的使用,轨道几何形位或多或少将产生偏移量。轨道几何形位的偏移若在容许偏差范围内,则不需要纠正;若轨道几何形位的偏移超出了容许偏差,则需要进一步纠正,以满足线路平顺性的要求。在维持轨道结构稳定的条件下,首先选用拨道的方法进行轨道不平顺的纠正,如果不能满足,可以采用起道、改道的方法。拨道、改道、起道作业的设备主要有捣固车、小型机具等,使得轨向、水平、高低、轨距等几何形位符合标准值。
1.1 小型机具(起道机、撬棍)。使用小型机具进行作业时,主要是根据经验目测相关位移量的多少,偶尔存在一定的偏差量,效率较低,对作业人员技术水平要求相当高,需要的人力较多。如果某一地段需要的作业量较大时,小型机具由于自身的限制是无法完成的。但是,在钢轨接头错接的线路区段,无法使用大型机械进行作业,这时就需要使用小型机具进行相关作业。
1.2 捣固车。捣固车是大型养路机械的一种,适用于铁路线路的新线施工、既有线大中修清筛作业后和运营线路维修作业,对轨道进行自动抄平、起拨道、道碴捣固作业,提高道床石碴的密实度,增加轨道的稳定性,消除轨道的方向偏差,左、右水平偏差和前、后高低偏差,使轨道线路达到线路设计标准和线路维修规则的要求,保证列车的安全运行。捣固车是线路自动化养护的大型机器,可以实现拨道、捣固等功能[1]。使用捣固车时,检测过程大部分都是自动完成的,但是在变坡点、缓和曲线地段测量的矢距需要调整。
2.轨道几何形位的纠正方法
2.1 起拨改道原理。拨道是把一根钢弦当成参照物,靠近捣固车的后端为设计坐标,前端用测量拨道值校正偏差;以钢弦两端点为基准,使用水平位移传感器测量偏差,此偏差值与理论设计值进行比较,当偏差为零时作业完成[2]。起道是将线路低洼处所起高,以找平轨面、消灭或减少轨道下沉的残余变形,改善道床弹性。改道是为了改正超限或接近超限的轨距及其变化率,消除线路方向不良,直线以左股为标准股,曲线以上股为标准股,按规定的轨距值改动另一股钢轨位置的作业。
2.2 起拨道作业流程。全自动智能起拨道作业流程为:先将起拨道捣固车设置为工作状态,把激光发射小车放到发射位置;将激光发射器的坐标调整到标准位置,通过L尺测定激光发射处基准轨坐标与标准坐标的偏移量;将图像接收器的坐标调整到标准位置,通过L尺测定图像接收处基准轨坐标与标准坐标的偏移量。将几何形位参数存入数据处理电脑后启动作业,捣固车每前进5 m,系统收集一次起、拨道量数据,GVA系统输出起、拨道量数据控制作业,GVA系统的作业反馈测量系统反馈起、拨道量数据,如果反馈数据是零,停止该项作业。如此循环,进入下一个作业。当捣固车距离激光发射器5 m时,作业结束。全自动智能起拨道作业利用激光测量系统,采用绳正法改善轨道平顺性,消除长波不平顺,改善乘客舒适度,避免了工序衔接之间的人为失误,作业质量由设备自身严格保证,至此起拨道施工技术有了新的突破。
2.3 激光拨道系统原理。捣固车拨道系统是一个闭环的电液伺服系统,其原理是将实际线路和理想线路水平方向的偏差转换成电流信号,控制电液伺服阀,然后控制执行机构将钢轨拨回到设计位置[3]。在实际的拨道过程中,需要找出作业点相对于设计位置的偏差。为便于自动测量出偏差,在直线地段使用激光拨道方法,而在曲线地段需要配备专用设备。激光拨道系统原则上是通过激光自动测定实际线路与设计线路在水平面上的偏移量,然后把偏移量自动输入到拨道伺服系统,继而机器能实现自动拨道作业。如图1(a)所示,AB段直线线路为例,实线段代表设计直线线路,虚线段代表实际线路,假设B点为已经拨过道的轨道点,机器从B向A方向作业,到A轨道点时,要求输入A点设计参数,读取传感器测量实际值,计算偏差fd并输入系统[4]。要借助激光自动测量出fd值,可先在机器前方C点找到线路理想中心位置并放置一氦—氖激光器[如图1(b)所示],再在拨道工作位置A点机器上放置一个可以自动左右平滑移动的平面光电接收器(如图2所示);因为激光的光束传输到几公里外只有毫米级的光斑偏差,基本不受外界影响,而平面光电接收器的感光面由光电池构成,对激光敏感而对自然光不敏感,接收器内部有光电转换电路能自动识别激光照射的位置,所以从C点发射的激光照到A点位置的接收器上,接收器可以判断出A点相对C点是偏左、偏右、还是正对。如果偏左,则接收器输出信号控制驱动一小电机带动接收器向右移动直到正对为止,与此同时由小电机带动的电位器反应出接收器向右移动的量,这个量就是前面所说的fd偏差。如果偏右,则反之。这样一来,在对AC段线路拨道时,机器从A点出发向C点前进,每拨道一个点激光系统就自动测量其fd值,不需要人工测量和输入。
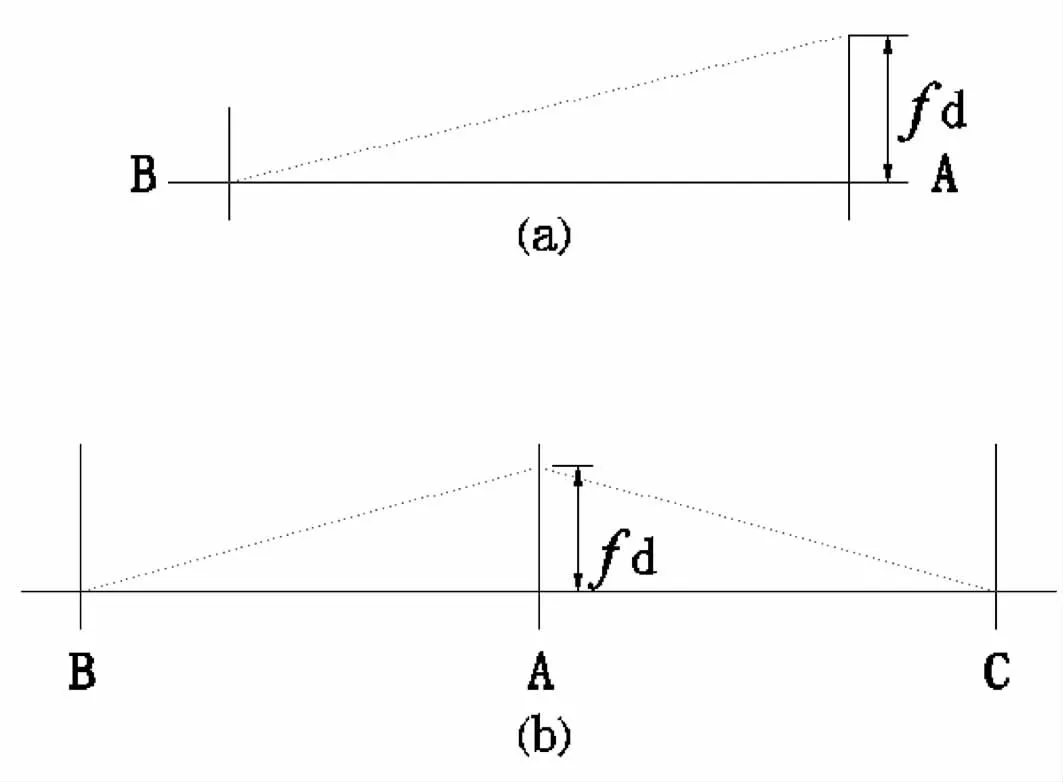
图1 BA段直线线路简图

图2 激光拨道原理说明简图
2.4 拨道的几何原理。拨道测量系统由A、B、C、D四个小车组成,作业时它们与钢轨贴紧,小车的位置可以显示钢轨的几何状态[5]。在曲线地段作业时,将传感器安装于B、C点,A、D间形成绷紧的钢弦,可以测出B、C点距离钢弦的距离H1、H2(称矢距),如图3所示。
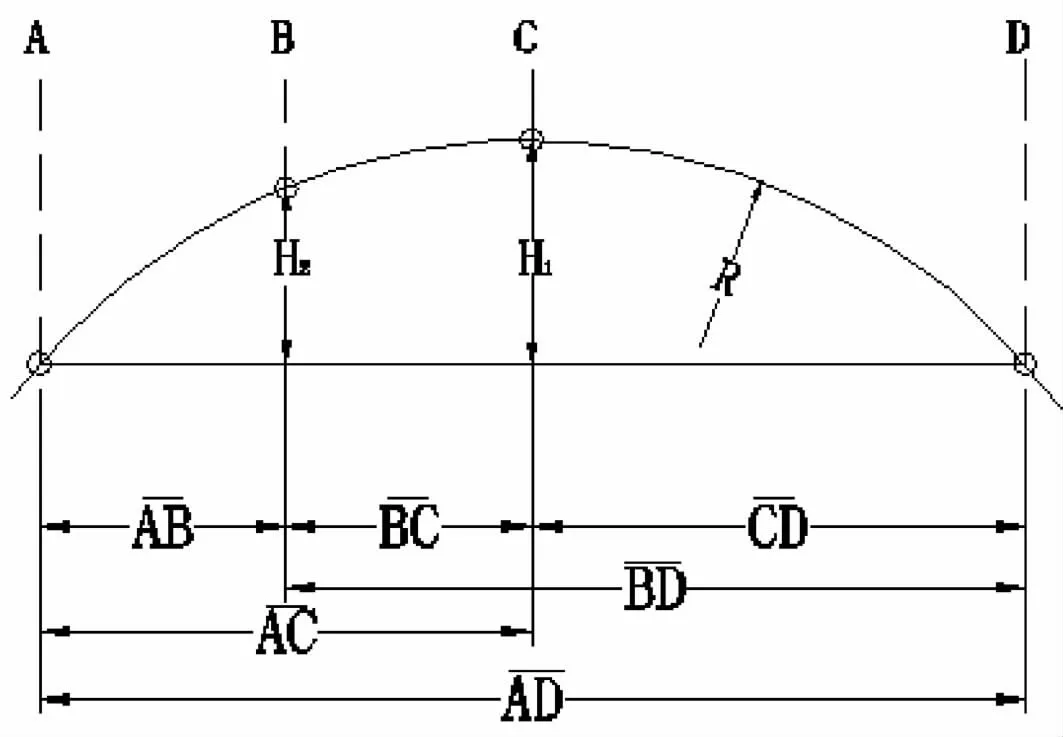
图3 拨道几何原理
H1、H2计算公式如下其中R为圆曲线半径) (式1)
3.总结:
轨道结构的不平顺将使车轮、钢轨之间产生激扰源,将增加振动和动作用力,增加轨道结构的振动,降低列车运行的平稳性、舒适性,增加噪声的影响,缩短设备的使用寿命,严重时将影响列车运行安全,对乘客安全有威胁[6]。文章对几何形位纠正技术进行了探索,重点对激光拨道系统原理、拨道几何原理以及拨道补偿原理进行了阐明及探索,通过对补偿量进行计算,轨道几何形位得以纠正。C
猜你喜欢
装备制造技术(2020年2期)2020-12-14 03:09:28
今日农业(2019年12期)2019-08-15 00:56:32
铁道通信信号(2018年8期)2018-11-10 05:15:48
制造技术与机床(2017年8期)2017-11-27 02:10:22
南方人物周刊(2017年25期)2017-08-25 06:06:50
中国铁道科学(2015年5期)2015-06-21 06:53:20
中国铁道科学(2015年4期)2015-06-21 06:46:04
上海铁道增刊(2015年1期)2015-03-23 09:25:02
中国铁道科学(2014年6期)2014-06-21 06:35:22
电子设计工程(2014年9期)2014-02-27 11:57:55
