基于线性扩张状态观测器的电流谐波抑制
2022-03-30 04:41刘亚静孙章军
微电机 2022年2期
段 超,刘亚静,孙章军,任 武,李 琳,刘 乐
(1.北京航天控制仪器研究所,北京 100039;2.北京交通大学 电气工程学院,北京 100044)
0 引 言
永磁同步电机(PMSM)有着体积小、功率密度大和效率高等诸多优点,广泛应用于数控机床、机器人和航空航天等领域[1]。PMSM目前普遍采用的控制策略为矢量控制,通过坐标变换,使PMSM的控制效果可媲美直流电动机控制效果。在PMSM矢量控制系统中,由于功率开关器件的电压死区、PMSM本身的非线性因素以及信号反馈传感器的检测误差等因素,给系统带来了所不期望的扰动,扰动通过坐标变换在电流环中表现为电流谐波形式。电流谐波的存在会造成PMSM的转矩脉动,影响系统性能。
国内外学者对抑制电流环中电流谐波进行了大量研究,文献[1]对主流的电流谐波抑制策略进行了综述,其中讲到了自抗扰控制。自抗扰控制(ADRC)是由我国学者韩京清提出的一种先进控制策略,其核心部分为扩张状态观测器(ESO)[2-4],目前在电机控制领域有着大量的研究与应用[5-11]。其中文献[5]详细分析了线性扩张状态观测器(LESO)的参数选取对PMSM矢量控制系统的性能影响,并给出了针对PMSM的 LESO参数整定步骤。文献[6]将ADRC与滑模控制(SMC)结合应用于PMSM的鲁棒控制;文献[7-8]将ADRC应用于PMSM矢量控制系统的速度环,其中文献[7]采用双LESO来提高PMSM速度控制的抗扰能力;文献[8]通过对LESO降阶提高了扰动观测速度与精度。文件[9]采用新型ESO实现了周期性转矩脉动的有效抑制。文献[6~9]均是将ADRC或其中的ESO应用于速度环,由于系统速度环数学模型较复杂,有着计算量较大的缺点。
部分学者对ADRC或ESO在电流环中的应用也进行了研究,文献[10]通过构造电流环ESO来补偿SVPWM的死区效应影响;文献[11]构造电流环ADRC来改善控制系统的时间延迟影响;均取得了很好的效果。
本文针对电流谐波的抑制问题,设计了电流环LESO来抑制电流谐波,分析了LESO和整个电流环的稳定性并进行了参数整定,随后给出了一种与电流环传统PI控制进行性能对比的方法。最后通过仿真验证了电流环LESO对电流谐波抑制的有效性。
1 电流环线性扩张状态观测器设计
采用id=0矢量控制策略下的PMSM电流环控制框图如图1所示,其中的Gid(s)与Giq(s)分别表示id、iq电流控制器的传递函数。工程中电流控制普遍采用比例(P)控制或比例积分(PI)控制。
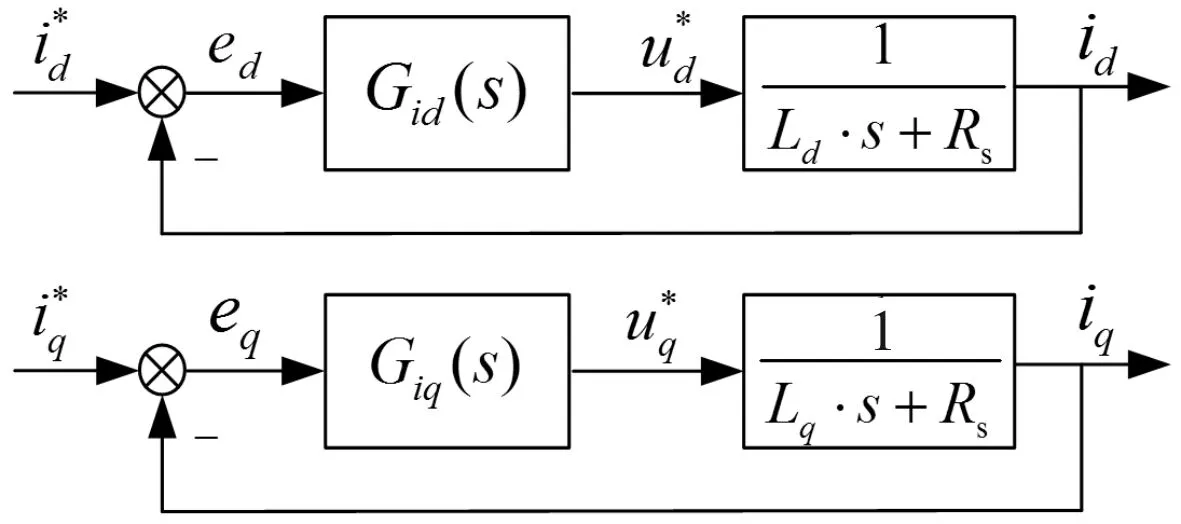
图1 电流环控制框图
实际PMSM矢量控制系统中,由于逆变器的电压死区、电流采样偏差和电机本体设计不合理等因素的存在,会在矢量控制系统中引入扰动,这里统一记为外部扰动δ,δ为非线性。δ通过坐标变换在电流环内表现为电流谐波形式,记d轴电流谐波扰动为δd,q轴电流谐波扰动为δq。引入了电流谐波的电流环控制框图如图2所示。
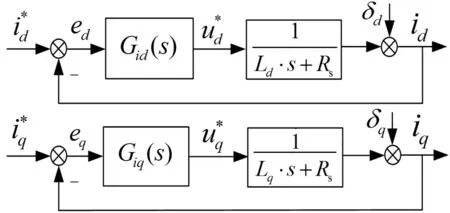
图2 引入了电流谐波的电流环控制框图
由图2可得电流环的数学模型为
(1)
从式(1)可知,电流环d、q两轴的数学模型形式相同,下面以q轴为例进行电流控制器的设计与分析,d轴电流控制器的设计与分析同q轴。
由式(1)可得q轴数学模型状态方程
(2)

式(2)可简化为
(3)
式中,记f为总扰动,包含δq和内部未知变量。
(4)
依据式(4)可构造电流环线性状态观测器(LESO)如式(5)所示,用于观测提取电流环中的总扰动f。
(5)
式中,β01,β02为LESO的待整定参数;z1为iq的估计值;z2为f的估计值。当β01,β02整定合适时,可得
(6)
将总扰动f的估计值z2进行反馈补偿
(7)
由式(3)、式(6)和式(7)可得
(8)
对比式(8)和式(3)可知,一个非线性系统简化为一个一阶线性积分系统。将简化后的线性一阶积分系统进行比例闭环控制
u0=Kad·(r-x1)
(9)
式中,Kad为电流环比例系数;r为q轴电流给定值。
由式(8)、式(9)可得采用了LESO的电流环闭环传递函数为
(10)
由式(10)易知,比例系数Kad>0,系统稳定。图3给出了采用LESO的q轴电流环控制框图,虚线框内为采用LESO的q轴电流控制器。d轴电流控制器设计同理。
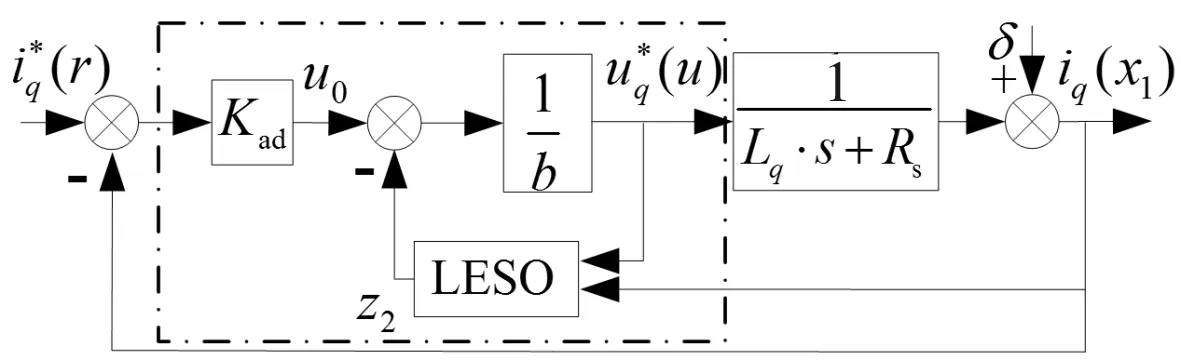
图3 采用LESO的q轴电流环控制框图
2 稳定性分析
2.1 LESO稳定性分析
与式(4)相对应的电流环状态矩阵方程组为
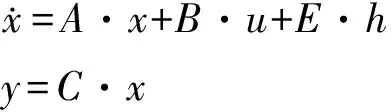
(11)

构造系统的全维状态观测器为
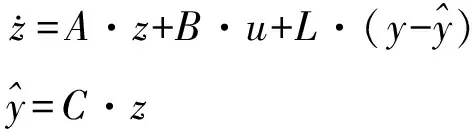
(12)
式中,L=[β01β02]T;为增益矩阵。
式(12)即为电流环LESO。记LESO估计误差为ei=xi-zi(i=1,2)。式(11)与式(12)相减可得误差状态矩阵方程为
e=(A-LC)·e+E·h
(13)

可求取误差状态矩阵方程的特征多项式为
λ(s)=det·[s·I-(A-LC)]=s2+β01·s+β02
(14)
当h有界,且β01>0,β02>0,所构造的线性扩张状态观测器BIBO稳定。
2.2 电流闭环跟踪误差稳定性分析
由式(6)、式(7)、式(9)可构造状态反馈矩阵方程为
u=F·z+Q·r
(15)
式中,F=(1/b)[-Kad-1];z=[z1z2]T;Q=Kad/b。
结合式(11)、式(12)、式(15)可得采用了LESO的电流环状态矩阵方程为

(16)
求取式(16)的特征值为
(17)
已知Kad>0,β01>0,β02>0;r作为给定信号,是有界的;只要h有界,即总扰动f可微,则采用LESO的电流环BIBO稳定。
3 参数整定
由式(10)可知,采用LESO的电流环可等效为一阶惯性环节,电流环的带宽等于比例系数Kad。可通过调节Kad来调节电流环带宽。
接下来对LESO的参数进行整定。由式(5)求取输出信号z1、z2关于输入信号y和u的传递函数为
(18)
易知LESO的特征多项式为
λ(s)=s2+β01·s+β02
(19)

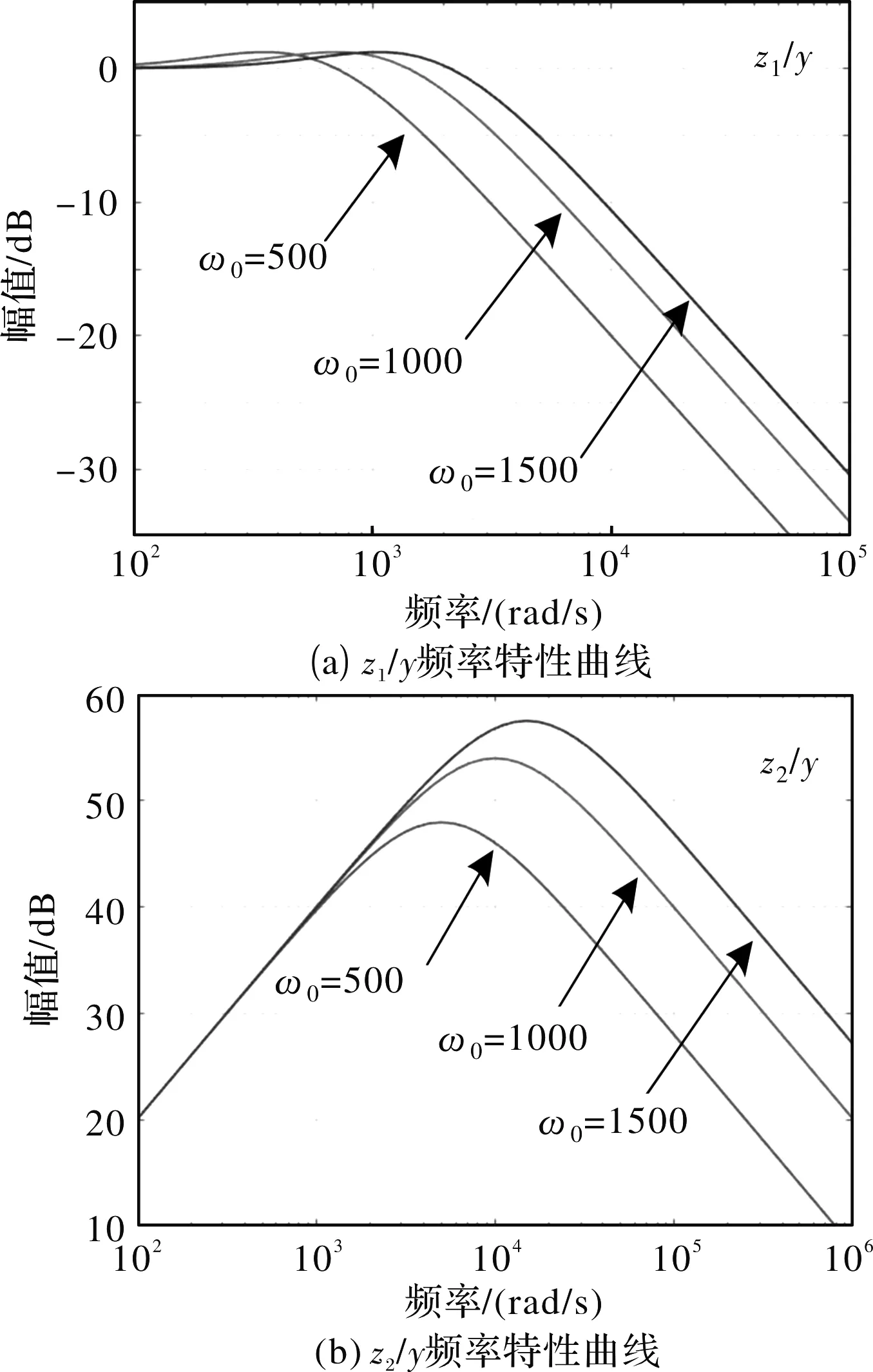
图4 LESO输入/输出信号频率特性曲线
4 与传统PI电流控制器性能对比
由前3小节理论分析可知,若LESO参数β01,β02选取合理,可实现电流谐波的有效抑制。采用LESO的电流环等效框图如图5所示。
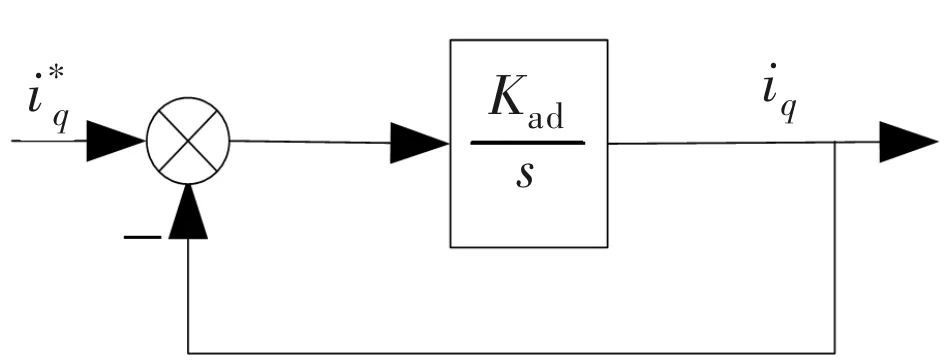
图5 采用LESO的电流环等效框图
采用传统PI控制器的电流环控制框图如图6所示。
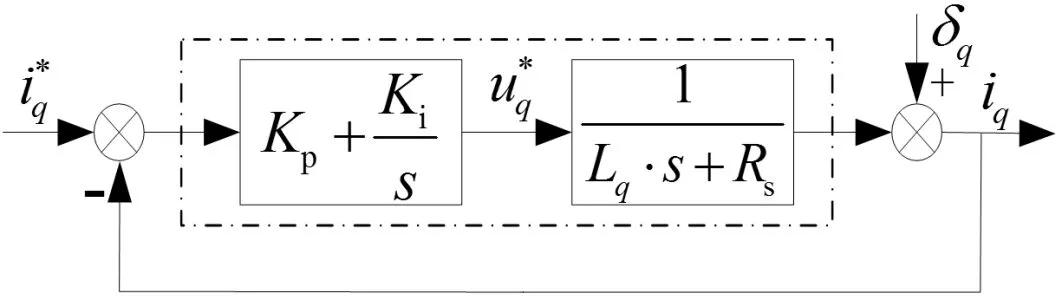
图6 采用PI控制器的电流环
令Kp=Kad·Lq,Ki=Kad·Rs;则PI控制器传递函数为Kad·(Lqs+Rs)/s,与PMSM电流环数学模型抵消分子分母后,采用PI控制器的电流环等效框图如图7所示。
对比图5与图7可知,采用LESO的电流环对电流谐波的抑制效果要优于电流环PI控制器。
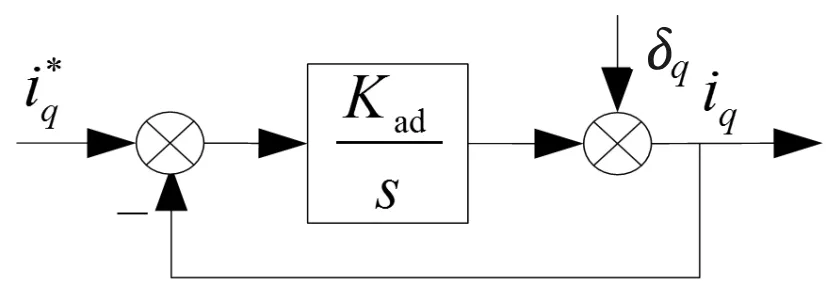
图7 采用PI控制器的电流环等效框图
5 仿真验证
电流环采用了LESO的PMSM矢量控制系统框图如图8所示,速度环仍采用PI调制策略。
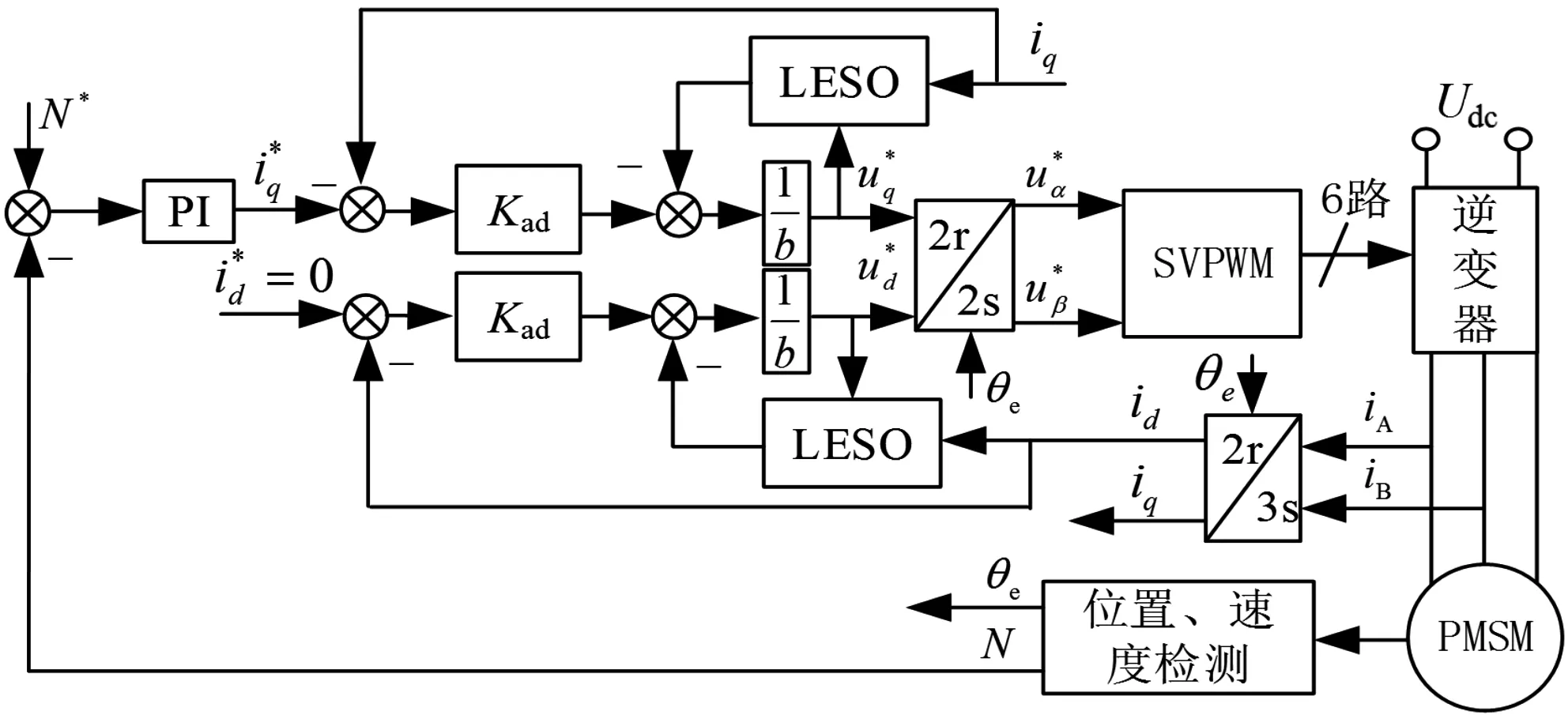
图8 电流环采用LESO的PMSM矢量控制系统框图
在Matlab/simulink软件平台上依据图8构建PMSM矢量控制系统进行仿真。电机仿真参数设定为实际项目用永磁同步力矩电机参数,如表1所示。

表1 电机仿真参数
控制系统其它参数设定如下:母线电压28 V;功率管开通关断死区TBD=2×10-6s;电流环LESO参数ω0=1500,比例系数Kad=100;速度环PI控制器比例系数Kp_v=0.05,积分系数Ki_v=2;负载转矩TL=0.35 Nm;给定速度N*=50 r/min。
为进行性能对比,同时构建电流环、速度环均采用PI控制器的PMSM矢量控制系统进行仿真。依据第4小节对电流环PI控制器设定参数,电流环比例系数Kp_i=0.6,积分系数Ki_i=665,其余参数同上。
图9给出了控制系统的三相电流仿真波形,其中图9(a)为电流环采用PI控制时的三相电流波形,图9(b)为电流环引入LESO控制时的三相电流波形。对比图9(a)和图9(b)可知,电流环采用LESO的控制系统,相电流正弦度更好。图10给出了图9中A相电流的谐波分析结果,其中图10(a)对应图9(a)中A相电流谐波分析结果,图10(b)对应图9(b)中A相电流谐波分析结果。由图10可知,A相电流中主要电流谐波成分为5次和7次谐波。电流环采用PI控制时,A相电流5次谐波成分占2.27%,7次谐波成分占2.88%,总谐波失真率为4.60%。电流环引入LESO时,A相电流5次谐波成分占1.44%,同比减少了0.83%;7次谐波成分占2.24%,同比减少了0.64%;总谐波失真率为3.56%,同比减少了1.04%。
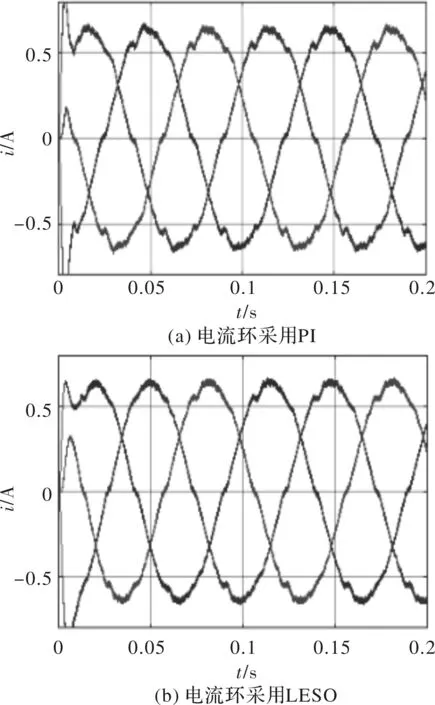
图9 三相电流仿真波形
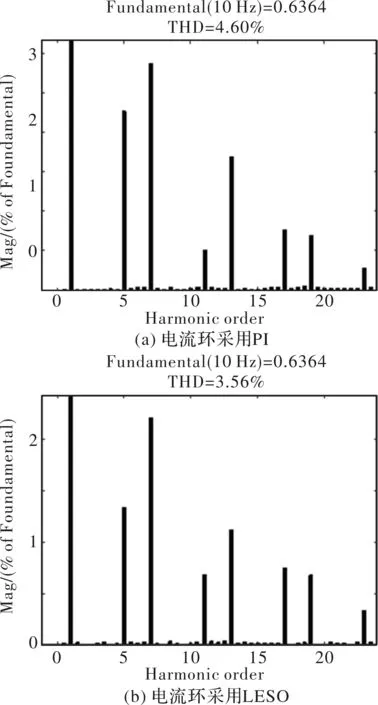
图10 A相电流的谐波分析结果
图11给出了PMSM的电磁转矩Te仿真波形,从图中可知,电流环采用PI控制的系统有着较明显的转矩脉动现象,电流环采用LESO的控制系统,转矩脉动得到了较好的抑制。图12给出了对应于图11的Te谐波分析结果。其中图12(a)为电流环采用PI 控制时的Te谐波分析结果,图12(b)为电流环引入LESO控制时的Te谐波分析结果。对比图12(a)与图12(b)可知,相比于电流环采用PI控制,电流环采用LESO时,电磁转矩Te的总谐波失真率从3.45%下降到3.05%,减少了0.4%。
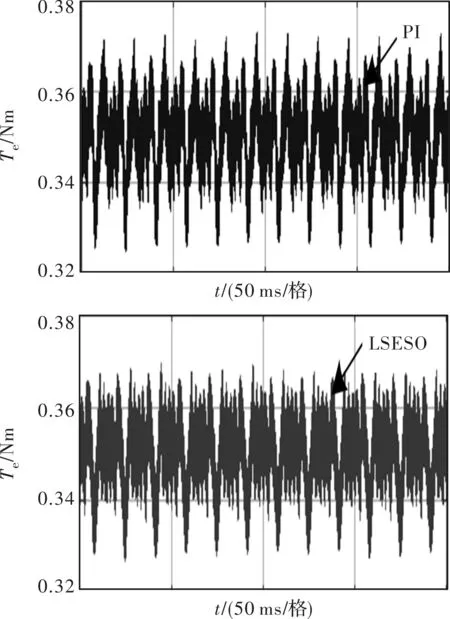
图11 电磁转矩Te仿真波形
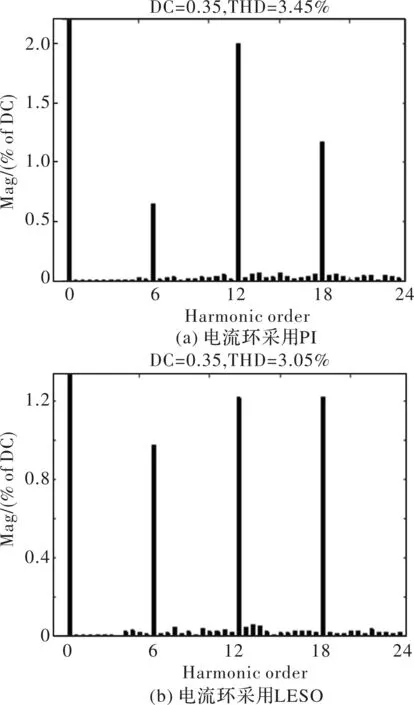
图12 电磁转矩Te谐波分析结果
6 结 语
本文设计了电流环LESO用来抑制电流谐波,通过理论分析证明了LESO和整个电流环的稳定性。给出了LESO和整个电流环的参数整定方法,其中电流环带宽正比于比例系数Kad,LESO参数ω0的大小理论上与电流谐波的抑制效果成正相关。
通过理论分析对比了采用LESO的电流环与采用PI控制的电流环对电流谐波的抑制能力,并进行了仿真验证。验证了电流环采用LESO对电流谐波有着较好的抑制效果,进而抑制PMSM转矩脉动。
猜你喜欢
电工技术学报(2022年20期)2022-10-29
上海师范大学学报·自然科学版(2022年3期)2022-07-11
重庆理工大学学报(自然科学)(2022年5期)2022-06-18
现代电力(2022年2期)2022-05-23
水下无人系统学报(2021年6期)2022-01-15
山东建筑大学学报(2021年6期)2021-12-23
北京航空航天大学学报(2021年7期)2021-08-13
汽车维修技师(2019年7期)2020-01-16
汽车维修技师(2018年11期)2018-05-11
中学生数理化·高一版(2017年1期)2017-04-25