
永磁同步电动机改进滑模位置控制算法
2022-03-29 09:36杨冬雪陆华才
安徽工程大学学报 2022年1期
杨冬雪,陆华才
(安徽工程大学 电气工程学院,安徽 芜湖 241000)
永磁同步电动机因具有功率密度大、驱动能力强、体积小和低转动惯量等特点,广泛应用于各种伺服驱动系统中。基于永磁同步电动机的非线性,在实际应用中还会受到外部负载扰动和内部参数变化的影响,因此传统的PI控制很难在快速性和抗扰性方面同时达到好的控制结果[1-2]。为提高永磁同步电动机的性能,人们提出了各种非线性控制方法,其中滑模控制的快速响应和鲁棒性引起了人们的关注。设计滑模控制系统主要通过以下3个步骤:滑模面的选择、设计趋近律、得出控制率[3]。传统的滑模控制通常选择线性滑模面,只能保证系统的渐近稳定。文献[4]中应用改进趋近律的终端滑模控制,相比于传统的滑模控制,调节时间较短,响应较快,但是当施加扰动时仍存在较大的转速波动。文献[5]中提出非奇异快速终端滑模控制策略,有效降低了收敛时间,并克服了终端滑模的奇异性问题。文献[6]提出了改进型滑模控制观测器,可以准确地获得转子位置信息,减小了估计误差。文献[7]设计了一个自适应滑模控制器的伺服控制系统,使系统响应快速无超调地跟踪输入信号。文献[8]提出模糊自抗扰控制,达到了抑制抖振的目的,减小了系统的跟踪误差。
为了进一步提高系统的快速性和鲁棒性,在PMSM外环采用连续非奇异终端模糊滑模控制(Continuous Non-singular Terminal Fuzzy Sliding Mode,CNTSM-Fuzzy),克服了终端滑模控制的奇异性,削弱了抖振现象。内环采用线性自抗扰控制(Linear Active Disturbance Rejection Control,LADRC)。LADRC的核心思想是将系统的内外扰动分类为总扰动,通过扩展状态观测器实时估计包括总扰动在内的系统状态,并设计非线性误差反馈控制律,实现总扰动的动态补偿和闭环误差的快速收敛,从而保证电机启动时的电流状态,克服内部参数变化带来的波动。文献[9]提出了一种基于差分进化算法的PMSM差分进化策略,表明了差分进化策略的有效性和收敛性。在文献[10]中,针对PMSM提出了一种线性/非线性自抗扰控制切换控制策略,解决了非线性ADRC的参数整定和稳定性分析问题。在文献[11]中,用LADRC代替PMSM的电流环PI控制,该控制方案具有较强的鲁棒性和抗干扰能力,即使在大负载转矩干扰的情况下也具有较强的抗干扰能力。
通过以上分析,研究设计了结合自抗扰控制的非奇异连续终端模糊滑模控制方法(CNTSM-Fuzzy-LADRC),以提高永磁同步电动机伺服系统的位置跟踪性能和鲁棒性能,并克服终端滑模控制的非奇异性。该算法用连续函数取代开关函数,避免了开关函数不连续性所产生的影响,并且通过模糊控制在线实时调整滑模控制参数,减小因参数给定不当造成系统抖振;电流环采用线性自抗扰控制,保证电机启动时电流条件,克服内部参数发生变化时引起的波动。为了验证该方法在PMSM位置控制系统中的有效性,以非奇异终端滑模(Non-singular Terminal Sliding Mode,NTSM)、非奇异终端滑模控制结合线性自抗扰控制器(NTSM-LADRC)为对照组。仿真结果表明,该方法设计的控制器能够提高系统的快速性和鲁棒性。
1 PMSM的数学模型
PMSM的定子通常采用A、B、C三相对称绕组,在空间上彼此相差120°电角度,定子和转子之间通过气隙磁场耦合。在分析永磁同步电机的数学模型时,常做如下假设[12]:
(1)忽略磁路饱和,不计铁芯中的涡流和磁滞损耗;
(2)三相绕组对称,在空间上互差120°电角度且不计边缘效应;
(3)转子上没有阻尼绕组,永磁体也没有阻尼作用;
(4)气隙磁场呈正弦分布,忽略电机齿槽效应和高次谐波的影响。
定义(id,iq,ω)为永磁同步电机系统状态变量,电压方程如式(1)所示:
(1)
磁链方程:
(2)
转矩和运动方程:
(3)
式中,ud、uq分别为d、q轴的定子电压;id、iq是d、q轴电流;Ld、Lq是d、q轴的定子电感;ψd、ψq是d、q轴的磁链;Rs为定子电阻;ψf为永磁体的磁链;J是电动机的转动惯量;Pn为极对数;B为粘滞摩擦系数;ωr为机械角速度;ω为电角速度;Te、TL为电磁转矩和机械负载转矩;研究所选择的是表贴式永磁同步电动机,因此Ld=Lq=L。
2 连续非奇异终端滑模模糊控制器设计
为了提高整个系统的响应速度,削弱终端滑模控制中产生的抖振现象,解决存在的奇异性问题,提出连续非奇异终端模糊滑模控制算法,结构图如图1所示。

图1 控制器结构图
2.1 滑模控制器的设计
采用非奇异终端滑模控制算法,控制器输出存在抖振现象,为了克服这一现象,用连续的趋近律代替不连续的趋近律。
定义位置跟踪误差为
e=θref-θ,
(4)
式中,θref、θ分别为参考位置和实际位置。
将式(4)求一阶微分可得
(5)
系统滑模面设计如下:
s=e+β(e′)m/n,
(6)
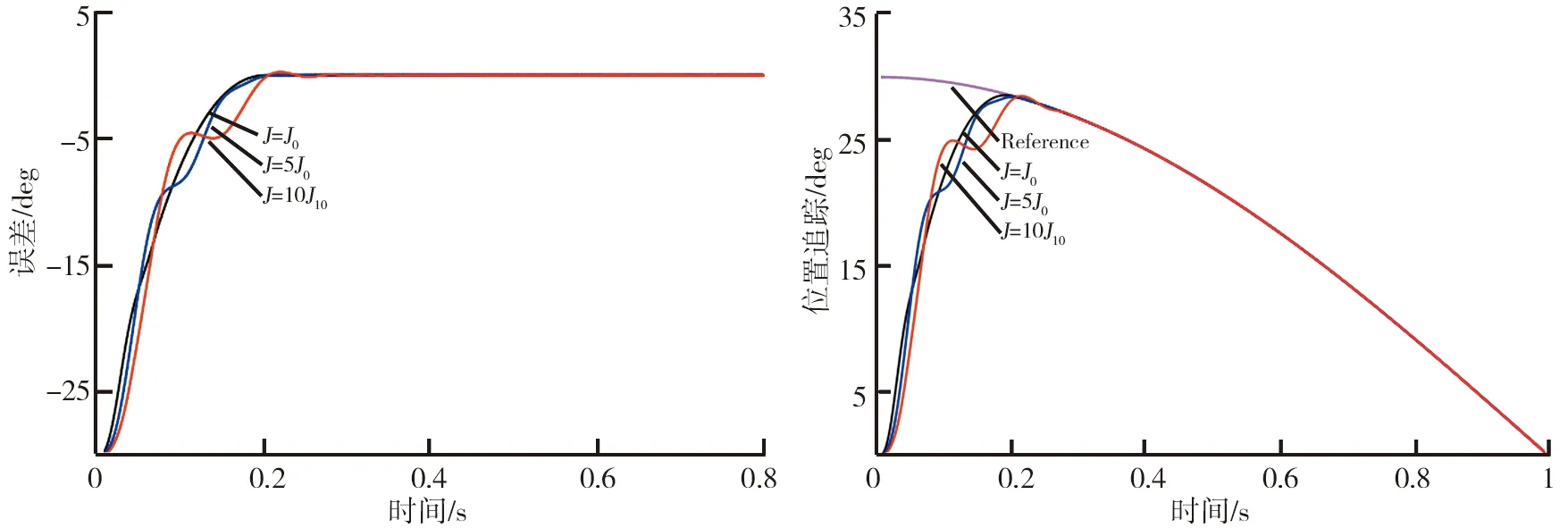
式中,0<β<1,m、n为正奇数且满足n 系统滑模趋近律设计如式(7)所示: s′=-k[s+|s|αsgn(s)], (7) 式中,k>0,α<1。 根据式(1)、式(4)~(7)可以得出所设计控制器的表达形式如式(8)、式(9)所示: (8) (9) 为了提高永磁同步电动机的响应时间和抗扰性能,式(7)中的k值需要根据运行状况进行实时调节,因此,在提出的控制算法中采用模糊控制对k值进行实时在线调整。滑模控制存在的条件是ss′<0。 根据模糊控制原理,选取s、s′作为模糊控制器的输入,k^作为模糊控制器的输出。定义模糊集:{PB=正大、PM=正中、PS=正小、ZO=零、NS=负小、NM=负中、NB=负大}。在满足ss′<0的条件下,制定的模糊控制规则如表1所示。 表1 k^模糊控制规则 选取三角函数作为隶属函数。三角函数的输入中心值为{-6,-4,-2,0,2,4,6},对应{NB,NM,NS,ZO,PS,PM,PB}。模糊控制器对应的输出值为{-3,-2,-1,0,1,2,3}。采用重心法得到模糊控制器的输出[13]。 (10) 式中,u*为模糊控制器的输出;k^为滑模控制器的输入参数;μ(Ui)为输出模糊集合中第i个元素对应的隶属度。 用模糊控制器的输出k^代替式(8)中的k,滑模趋近律为 s′=-k^[s+|s|αsgn(s)], (11) 因此得到模糊控制器的控制量的表达式为 (12) 定理1 设计非奇异终端模糊滑模控制器应用在永磁同步电动机转速环。式(6)为滑模面,式(11)为滑模趋近律,系统状态到达并沿滑模面运动,实现系统稳定,增强系统的抗干扰性能和鲁棒性。 证明考虑Lyapunov函数v=0.5s2,对v求导得: v′=ss′=s[-k^(s+|s|αsgn(s))]=-k^s2+k^s|s|αsgn(s), (13) 如果s≥0,则式(13)可以改写为 v′=-k^(s2+s|s|α)≤0, (14) 如果s<0,则式(13)可以改写为 v′=k^s(s-|s|α)<0, (15) 综上所述,结合式(14)和式(15)可以得出v'≤0。由Lyapunov稳定性条件可得,系统稳定性被证明。 电流环作为永磁同步电动机控制系统的内环控制,作用是能够在电机启动过程中以最大电流启动,同时在有外部扰动时快速恢复稳定,加快动态跟踪响应;作为内环控制,还面临内部参数不确定性的影响。选取线性自抗扰控制(LADRC)代替传统的PI控制。线性自抗扰控制器主要包括微分跟踪器(TD)、线性扩张状态观测器(LESO)、线性误差状态反馈控制规律(LSEF)三部分[14]。根据线性自抗扰控制理论,由式(1)可以得出: (16) 将式(16)变换为 (17) (18) 式中,bq为电压增益;aq(t)为q轴电流环的总干扰。 一阶跟踪微分器的设计如下(TD): (19) (20) (21) x′=Ax+Bu+GgL, (22) 线性扩张状态观测器设计为如下形式: z′=Az+Bu-L(z1-x1), (23) 线性误差状态反馈控制规律设计如下: (24) 式中,kp为比例增益。 根据线性自抗扰控制的参数整定方法可知[15], (25) 式中,ω0为LESO的带宽;ωc为闭环系统的带宽。 基于非奇异连续终端模糊滑模控制结合线性自抗扰技术的永磁同步电动机矢量控制系统如图2所示。 图2 永磁同步电动机控制结构图 表2 永磁同步电动机的参数 电机空载情况下,3种方法仿真结果如图3、4所示。通过3种方法对比可以看出结合模糊控制和线性自抗扰控制的滑模控制算法在有限时间内的跟踪误差为零,并且追踪过程平稳。3种控制算法应用在永磁同步电动机的位置控制系统时的跟踪时间如表3所示。 表3 跟踪到参考位置的时间 图3 空载情况下位置追踪仿真结果 图4 空载情况下追踪误差仿真结果 电机在加入外部扰动的情况下,仿真结果如图5、6所示。在0.5 s时突加负载TL=2.5 N·m。从仿真结果可以看出,在加入扰动后,研究所提出的控制算法在跟踪误差、跟踪位移两方面都优于其他两种方法,3种方法的最大跟踪误差和恢复稳定时间如表4所示。研究提出的控制算法最大跟踪误差最小,恢复稳定时间最短。通过上述分析可以看出所提出的控制算法,在控制系统中加入扰动后具有良好的鲁棒性。 表4 仿真结果数据统计 图5 存在外部扰动时追踪误差的仿真结果 图6 存在外部扰动时追踪位移的仿真结果 另外,永磁同步电动机位置控制系统除了存在外部扰动,还存在内部参数变化产生的影响。本次仿真实验通过改变转动惯量的值(J=Jo,J=5Jo,J=10J0)验证该算法在内部参数发生变化的情况下的鲁棒性。位置跟踪误差和位置跟踪的结果如图7、8所示。从仿真结果可以看出:无论内部参数如何变化,瞬态响应都是快速且准确的。因此可以得出,所提出的控制算法对外部干扰和内部干扰具有很强的鲁棒性。 图7 不同转动惯量情况下追踪误差的仿真结果图8 不同转动惯量情况下位置追踪的仿真结果 针对永磁同步电动机位置控制系统的运动控制问题,提出了一种结合线性自抗扰控制和模糊控制的滑模控制算法,其主要优势有以下3点:采用连续趋近律设计控制器,在一定程度上降低了传统滑模控制的抖振问题;采用模糊控制实时调整参数,通过模糊语言对滑模控制的增益进行实时调整,提高了系统的响应速度和鲁棒性;采用线性自抗扰控制器作为内环控制,简化系统结构,解决了PI控制对于非线性系统的缺陷,降低了内部参数变化带来的影响。仿真结果表明,该算法具有快速准确的跟踪性能,对内部参数变化和外部扰动都具有很强的鲁棒性。该控制算法结构简单、计算量小,可用于其他相关的伺服系统。2.2 模糊控制器的设计

2.3 稳定性分析
3 电流环控制器的设计



4 仿真验证与结果对比







5 结论
猜你喜欢
西安交通大学学报(2022年7期)2022-07-19
舰船科学技术(2022年10期)2022-06-17
大电机技术(2022年2期)2022-06-05
科技研究·理论版(2021年22期)2021-04-18
水下无人系统学报(2021年1期)2021-03-10
中国测试(2018年9期)2018-05-14
电脑知识与技术(2016年28期)2016-12-21
汽车科技(2016年5期)2016-11-14
科技视界(2016年16期)2016-06-29
科技视界(2016年2期)2016-03-30
