番茄采摘机器人的SLAM运动控制系统设计
2022-03-28 07:46戴月,陈波
太原学院学报(自然科学版) 2022年1期
戴 月,陈 波
(1.滁州职业技术学院 实验实训中心,安徽 滁州 239000;2.西南科技大学 计算机科学与技术学院,四川 绵阳 621010)
0 引言
传统番茄采摘作业主要是依靠手工完成的,采摘效率低,整体采摘成本约占总成本的50%~70%[1]。然而,随着科学技术的发展,采摘机器人的出现提高了中国农业生产区的现有劳动水平,且有效地改善了劳动生产率。作为农业和采摘机器人设计和开发的重要技术,SLAM技术的主要特点是根据机器人所处的未知环境中的环境信息,通过即时定位和建图技术,使机器人能够智能地、准确地与环境地图进行匹配[2]。此外,依靠SLAM技术,可以提供采摘机器人自主供电,完成不间断的番茄采摘任务,并在指定采摘点和活动点自主导航。在机器人运动控制期间,系统使用内置传感器发送番茄采摘的实时信息。SLAM控制器是番茄采摘机器人运动过程成功的关键,包括主控模块、GPS定位模块、NS测量模块和超声波模块,这些模块可以实时提供机器人周围信息,方便机器人自主移动控制并同时更新机器人所处的当前环境信息[3]。
国内外针对机器人运动控制的研究较多,Yuka Kato和Mamiko Tanaka对网络延迟情况下的简单机器人远程导航进行了分析和实验。Mohammed Tahri Sqalli,Kyoichi Tatsuno等提出了基于SLAM和同时定位的障碍避障算法,对SLAM算法进行了改进和分析。上述这些研究为我们提供了将SLAM技术应用于机器人的可能性。基于此,本文通过将神经网络技术应用到番茄采摘机器人运动学中,提出运动逆解的通用方法,并在基础上设计了番茄采摘机器人运动控制软件框架,提出基于SLAM的番茄采摘机器人的导航方法。实验结果证明该方法的可行性、有效性和鲁棒性,研究结果可为后续研究提供理论依据。
1 采摘机器人介绍
番茄采摘机器人移动和抓取如图1所示,该机器人分为手臂抓取单元和移动行走单元两个模块。根据无人平台的应用需求,需要一套基于SLAM的同步定位与映射的移动机器人自回归控制系统与采摘机器人的模块对应[4],该控制系统通过建立当前局部地图与获得的全局地图之间的对应关系,减小由轨迹估计误差引起的机器人定位不确定性。当通讯信号丢失时,机器人将自动进入恢复模式,系统将跟踪先前通过路线计划记录的路线点,实时完成导航,修复起始位置来解决该问题[5]。

图1 番茄采摘机器人移动和抓取图
基于SLAM的番茄采摘机器人,其结构尺寸为860 mm×460 mm×420 mm。番茄采摘机器人的承载力为75 kg,其转向和驱动均是四轮独立,配置了可以独立进行相关控制的电机,从而构建了可以独立运作的伺服单元。番茄采摘机器人的机械臂具有5个方向的自由度,可以实现机械臂提升、机械臂中轴绕腰部旋转、轴的旋转、轴的伸缩等功能,能够适应不同高度和不同大小的采摘工况,具有比较强的通用性。
2 番茄采摘机器人抓手运动学
本文通过改进的D-H模型(modify Denavit-Hartenberg,MDH)对机械臂进行建模[6]。针对前四轴和腕部三轴的机构分别建立连杆坐标系,其坐标系如图2所示。

图2 连杆坐标系分布
腕部机构的根部固接于第四轴末端,二者运动学的合成即为总运动学正解。
2.1 运动学正解POE
2.1.1指数矩阵表示法
本文设计的番茄采摘机器人共有n个关节,关节转角分别为θi(i=1,2,…,n),关节运动旋量坐标为Si(i=1,2,…,n),该种状态下相对于基坐标系的正向运动学关系可表示为:
(1)
式中:ωi为单位运动旋量;qi为位置矢量;Tsb可看作关节运动对末端位姿的影响尺度;Tsb(0)为机器人不运动时的初始位姿。
2.1.2指数积计算
由指数积与矩阵的映射关系式可得此时指数积公式为:
gst(θ)=eξ1θ1eξ2θ2…eξnθngst(0)=eξ1θ1eξ2θ2eξ3θ3eξ4θ4gst(0)
(2)
由式(2)可知,机器人手臂的大臂与腕部在末端位置与其具体姿态是解耦的,这是本类型机械臂逆运动学求解的理论前提,也是设计机械臂的机械结构时主要考虑的因素之一。
2.2 神经网络运动学反解
机器人拟人手臂的运动学解耦即为逆运动学[8]。机器人逆运动学求解过程中,对求解的方程进行降维,可有效提高求解过程的收敛速度,提高求解的稳定性[9]。一般来说机器人的逆运动学反解通过将机器人的位置与姿态分离的代数迭代相结合,求解方程的全微分时运算开销较大,难以保证收敛速度,且传统的牛顿迭代法无法解决方程数少于未知数个数的问题。若采用解析法,同样无法解决上述问题,且解析计算过程中奇异点附近的逆解无法计算,会使得求解过程中的部分中间变量趋近于无穷大,从而导致机器人电机高速回转,加剧机器人本体的磨损,降低机器人的寿命。针对此问题,本文研究过程中将神经网络理论应用于机器人运动学理论中,根据精确的数据训练,精确描述实际机器人的运动学的输入和输出数据之间的关系。该算法可通过学习关节角度的差异,提高理论计算的关节角度与期望端点之间的精度以及机器人的定位精度和位置重复性。此外,运用神经网络可降低开发新机器人控制器所需的计算能力、校准时间、维护成本和工程时间。
不妨假定有N个样本,即(P1,a1),…,(Pj,aj),…,(PN,aN)。神经网络的输入向量为[P1,…,PN],神经网络的输出向量为[a1,…,aN]。可经由式(3)将机器人运动学的非线性映射转换为线性映射。
将课堂分为两部分,前半部分讲述理论,后半部分分析案例,即教师在完成某章节教学后,可以选择案例分析的方式来检验学生的掌握程度,还可以完成复习巩固甚至深化的工作。此种导入可帮助学生更深刻地掌握理解知识并提高执业技能。
hi=f(wiPj+a1i)
ak=f(wkhi+a2k)
(3)
式中:wi,a1i为隐含层的节点i与输入层的权值、阈值;wk,a2k为输出层与隐含层间的权值、阈值。

图3 神经网络拓扑结构
本文通过神经网络来表示末端执行器在运动学方程中的位置。网络结构有:输入层,两个隐藏层,输出层。输入层和输出层分别定义为机械手角度和末端执行器位置。网络结构通过学习算法的反向传播对权值进行更新,直到达到网络输出等于期望位置的条件。利用神经网络求解冗余机器人的逆运动学问题,可保证训练过程的收敛性。此外,可以通过增加学习率参数来提高训练速度。提高该网络的有效性、降低开销。此外,角度筛选可依据各关节的象限特征进行,最终获得唯一解,以上为拟人手臂的运动学逆解。
3 番茄采摘机器人SLAM导航的实现
3.1 激光雷达
光学探测器以其高灵敏度的特点被广泛应用于多个领域,如测量光子[10],通过光子计数接收器能够提升传感器、通信系统功率利用率等。激光照明的有源传感器,可以参考光谱特征和空间特征来调整滤波器参数,进而提升通信效率以及系统灵敏度。
地面上的车辆可以通过微波雷达的方式实现探测、跟踪和成像。长波微波雷达能够穿透树叶,此方式下雷达的性能会因为遮蔽物的变差,图像分辨率也会受到一定影响。高分辨率的三维成像型激光雷达技术及应用,能够识别地面车辆或者机载平面成像车辆。本文提出的三维成像直接探测雷达技术在车辆导航、机器视觉、工业安全、质量管控和地形建模等方面有积极作用。选择的激光雷达型号为Lidar,其垂直FOV数值为-16~15,水平FOV为360,垂直角分辨率为1,水平角分辨率为5 Hz∶0.09/10 Hz∶0.18/20 Hz∶0.36。
3.2 自主建图
常见的环境地图有拓扑结构地图、几何地图等。常用单线三角公式、基于数据存储结构的搜索、概率表述和推理等方法来创建地图。移动机器人的地区,本质上是机器人所在环境的模型展示,可以将地图建立的过程称作地图构建。常见自建地图包括尺度地图、拓扑地图等。
3.2.1尺度地图
一般来说,尺度地图(图4)的位置是一个坐标值,大部分移动机器人的定位都会使用坐标系。
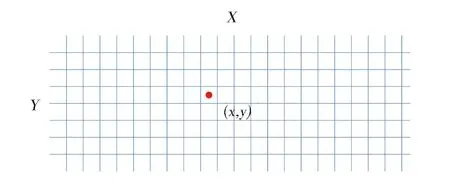
图4 尺度地图
3.2.2拓扑地图
拓扑地图的尺度与实际情况之间存在明显差异,但是这种地图仅为了定位列车的停靠站点和路线,其被称为拓扑地图[11]。图5所示为拓扑地图的结构及节点,弧代表链接。拓扑地图并不强调精准坐标,而是节点之间的连接关系。图5所示的图中,左侧和右侧是等价关系,弧用于表示节点间的关系,对于规划测验来说拓扑地图非常重要。

图5 拓扑地图
3.3 激光导航
对2D激光雷达而言,移动机器人所获取的感知信息对于地图导航性能好坏具有非常大的影响[12]。机器人通过激光导航来获取感知信息,从而感知机器人自身周边的环境信息。移动机器人在复杂环境中运动时往往会被许多不稳定的因素所干扰,导致机器人建图与定位系统的鲁棒性比较差。为了有效解决复杂环境中机器人建图与定位系统鲁棒性差的问题,对离散点采用数据过滤与分割提取的方式来构建网格结构张量,借助先验知识来解决,同时由于使用了复杂环境的先验知识,特征提取的准确性大大提升。图6为移动机器人激光导航效果。

图6 激光导航
由图6可知,采用激光导航不仅仅可以对移动机器人周围的环境进行扫描,同时也可以达到对自身位置定位的目的。
3.4 定位与地图匹配
本文通过超声波与激光传感器局部定位系统来解决移动机器人定位的过程中经常遇到自身相对坐标系的定位问题,给出移动机器人在全局地图中的位置。利用超声波与激光传感器局部定位系统,可以快速获取移动机器人的信息。创建的地图合并之后,对变化量进行更新,就可以达到更新局部地图和完善全局地图的目的,这种方法能够有效地应用于在室内复杂环境工作的移动机器人。为了避免前后混淆导致模糊,将移动机器人的激光传感器作为定位标准。创建地图匹配、合并的关键是准确获得地图的偏移量,其中二维情况下的地图偏移量共3个,分别为x方向偏移量、y方向偏移量以及姿态转角偏移量θ。地图偏移量计算的关键在于找出不同地图之间类似的目标,通过类似目标计算地图似然函数。通过对提取特征与关联数据的更新,获得数据关联结果,从而实现对地图的更新与合并。
4 试验及结果分析
为了获取移动机器人移动环境中虚拟传感器反馈的距离信息,建立模糊避障的节点,从而得到移动机器人的左右轮速度,将其输入所建立的移动机器人模型中。图7为宽敞和狭窄两种环境下得到的到指定标记位置导航。

图7 不同环境下到指定标记位置导航
图7显示在宽敞环境中通过激光数据可检测到较远距离的环境分布,能够使得移动机器人对运动的方向快速定位;而在狭窄环境中,激光雷达扫描区域为狭长通道,即单纯地依赖于激光数据无法帮助移动机器人寻找到合适的行走路径,通过多个区域内标记的位置信息,可以实现较长稀疏环境特征下的导航。
为了验证所设计的SLAM运动控制的有效性,将该方法应用于机器人导航系统中,同时对简单障碍物环境、中等复杂障碍物环境、复杂障碍物环境3种情况进行仿真分析。简单障碍物环境中障碍物比较少,且形状比较规则;中等复杂障碍物环境中障碍物相对比较多且存在不规则的障碍物;复杂障碍物环境中障碍物多且不规则,最优路径选择最为困难。目前学术界并没有对障碍物环境复杂度进行明确的划分,本文采用MATLAB软件构建障碍物环境,通过改变障碍物的多少和障碍物的形状来构建3种不同类型的障碍物环境。对3种障碍物环境下路径规划结果进行对比分析,结果如表1所示。

表1 导航规划统计数据
由表1可知,对于3种障碍物环境下,SLAM导航算法均可以规划出最优的路径,路径规划的最短用时为6.6 s,最长用时为7.0 s,平均用时为6.7 s。
5 结论
采摘机器人应用于果蔬采摘中实现果蔬采摘自动化,提升了果蔬采摘的效率,论文设计了番茄采摘机器人的SLAM运动控制系统。建立基于SLAM的番茄采摘机器人抓取手臂模型,运动POE运动学求解运动学正解,采用神经网络求解运动学反解。通过阐述激光雷达、自主建图和定位与地图匹配,提出了基于SLAM的番茄采摘机器人的导航方法,并将其应用于番茄采摘机器人试验中。结果表明,该算法对3种不同障碍物环境均可以规划出最佳路径,算法的最短用时、最长用时和平均用时分别为6.6 s、7.0 s和6.7 s,满足实际采摘需要,这对农业生产实践具有一定的应用价值。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
河北省科学院学报(2020年1期)2020-05-25
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
重型机械(2019年3期)2019-08-27
制造技术与机床(2018年11期)2018-11-23
制造技术与机床(2017年3期)2017-06-23
海军航空大学学报(2015年1期)2015-11-11
中国海洋大学学报(自然科学版)(2014年8期)2014-02-28