基于嵌套自适应观测器的连铸结晶器振动位移系统有限时间容错控制
2022-03-25 07:37赵永超方一鸣刘乐刘仁和
控制理论与应用 2022年12期
赵永超 方一鸣 刘乐 刘仁和
(1.燕山大学工业计算机控制工程河北省重点实验室,河北秦皇岛 066004;2.智能控制系统与智能装备教育部工程研究中心,河北秦皇岛 066004)
1 引言
结晶器是钢铁铸坯成型的重要设备,通过设计控制器使结晶器按照期望波形上下振动可极大改善铸坯表面质量[1].相比于液压驱动,由伺服电机驱动的连铸结晶器振动位移系统具有可靠性高,便于维护等优点.但由于长期处于恶劣的工作环境,系统可能发生执行器故障,并且存在未知负载扰动的问题[2],导致系统跟踪精度和可靠性降低,严重影响铸坯质量.
为保证闭环系统在故障情况下的可靠性,容错控制被提出并得到了广泛关注.容错控制主要分为被动容错控制和主动容错控制.其中,被动容错控制通过设计一个固定的控制器,无论是否发生故障,系统均由该控制器控制.此外,因为不需要通过故障诊断环节获得具体的故障信息,所以被动容错控制一般能使系统对故障做出快速响应[3].文献[3]提出一种可自动将高电平控制信号分配到每个执行器的被动容错控制方法,提高了控制信号的分配效率;文献[4]基于广义马尔可夫变量输入模型以及随机分析和凸优化技术,设计了一种模糊切换容错控制器,提高了系统对随机执行器故障的性能.为了解决故障上界值未知的问题,文献[5–6]采用自适应与滑模控制相结合的方法设计容错控制器.其中:文献[5]将三阶滑模与自适应律相结合,有效地解决了执行器故障上界未知与系统抖振问题;文献[6]提出一种自适应反步非奇异快速终端滑模容错控制方法,实现对机械臂执行器故障的鲁棒容错控制.需要说明的是,被动容错多为根据故障上界信息设计的鲁棒控制,这在一定程度上降低了系统的控制性能,且由于控制器固定不变,因此被动容错控制能够处理的故障类型有限.
与被动容错控制不同,主动容错控制通过设计故障诊断观测器和重构算法来获得具体的故障信息,然后根据观测信息设计可重构控制器.文献[7]通过采用将基线控制器与一组可重构控制器相结合的方法,构造了一种能够适应效率损失和加性故障的主动容错控制系统;文献[8]首先利用迭代学习方法重构航天器的执行器故障,然后基于重构信息提出一种自适应快速终端滑模容错控制方法;文献[9]将时延观测器应用于故障的检测与估计中,并设计了一种快速终端滑模容错控制器,实现了有限时间容错控制;文献[10]基于对故障和扰动的重构信息,提出一种等效补偿容错控制器,来补偿故障和扰动对系统的影响;文献[11]提出一种利用非线性虚拟控制输入的反步容错控制器,除了引入辅助变量间接地对执行器故障进行估计之外,还对故障估计误差和扰动上界设计自适应律.相比于被动容错控制,主动容错控制能够处理更多的故障类型,满足更多的实际需求[9].
目前已有相关文献对带有扰动和建模不确定项的连铸结晶器振动位移系统进行跟踪控制方面的研究[1–2,12],而对其执行器故障的容错控制研究则相对较少,故本文针对带有执行器故障的连铸结晶器振动位移系统进行容错控制研究.但是,系统中扰动的存在给故障估计带来了一定的困难.针对此类问题,部分文献采用将执行器故障和扰动合为一个综合不确定项的处理方法,并对其进行观测估计,如:文献[5–6]采用自适应方法对综合不确定项的上界值进行了估计;文献[10]设计了一种未知输入观测器,实现了对故障和扰动构成的综合不确定项的重构.然而,文献[5–6,10]的观测方法均为渐近收敛,即当t→∞时,估计误差才收敛到原点,这越来越难以满足人们对收敛速度的需求.随着Lyapunov理论的不断发展,有限时间收敛应运而生,其指使系统状态能够在有限时间内收敛到一个阈值内,在一定程度上提高了系统的收敛速度.为实现在有限时间内观测系统中的不确定项,文献[9,13–14]分别提出一种时延观测器和自适应扰动观测器.其中,文献[13]需要提前已知不确定项上界值,而文献[14]仅考虑了扰动对系统稳态性能的影响.
基于上述分析,针对执行器故障与扰动同时存在的连铸结晶器振动位移系统,本文首先设计一种嵌套自适应观测器对由故障和扰动构成的综合不确定项进行估计,在综合不确定项及其导数上界值未知的情况下,实现估计误差在有限时间内有界收敛;其次,采用分层设计与终端滑模控制相结合的方法,分别针对系统中的位移环和电流环设计全阶滑模控制器(full order sliding mode controller,FOSMC)和终端滑模控制器(terminal sliding mode controller,TSMC),在补偿不确定项及估计误差对系统影响的同时,实现对系统的有限时间容错控制;然后,在设计容错控制器过程中引入一阶低通滤波器提高控制信号的连续性;最后,通过与文献[6]控制方法进行仿真对比,验证本文方法具有更好的控制精度和收敛速度.
2 结晶器振动位移系统模型与问题描述
2.1 结晶器振动位移系统数学模型
本文研究的是由伺服电机驱动的连铸结晶器振动位移系统,该系统由永磁同步电机(permanent magnet synchronous motor,PMSM)和机械传动两部分构成,其结构示意图如图1所示.
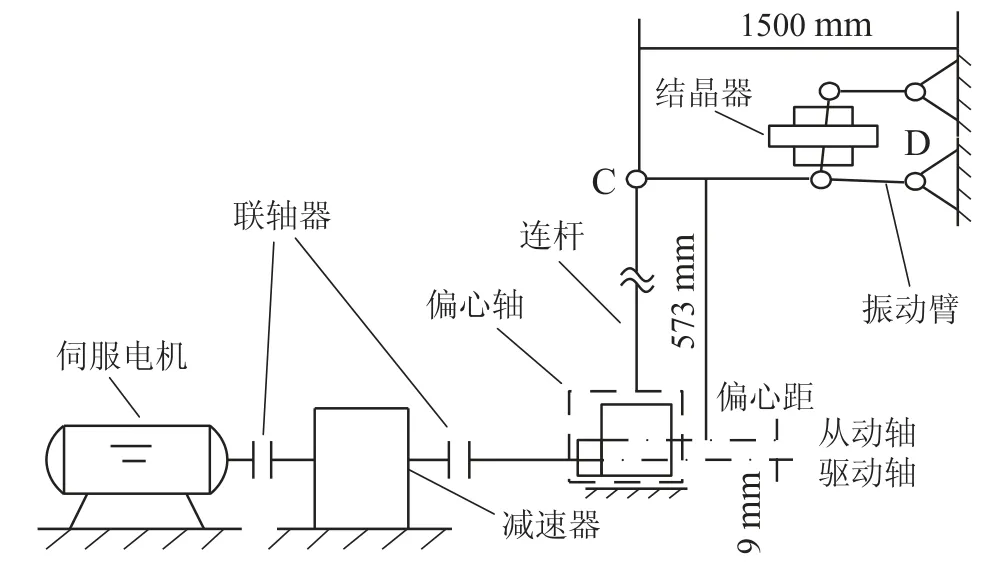
图1 伺服电机驱动的连铸结晶器振动装置结构示意图Fig.1 Diagram of the structure of the vibration device of continuous casting mold driven by the servo motor
该系统通过PMSM单方向变角速度运动,经减速器和偏心轴等机构带动连杆,进而驱动结晶器实现非正弦振动.考虑存在负载转矩扰动的问题,伺服电机驱动的结晶器振动系统数学模型如式(1)所示[15].
式中:xp代表结晶器振动位移;h代表结晶器振幅;i代表减速比;n是转速;id和iq分别为定子电流在d,q轴的分量;p是电机极对数;ψf为永磁体磁链;B为粘性摩擦系数;J为转子转动惯量;Rs为定子电阻;TL为负载转矩;L为定子绕组等效电感;ud和uq分别为定子电压在d,q轴的分量;第1个等式为位移子系统相关模型,第2个等式为位移子系统内速度环对象模型.
由于偏心轴经连杆到结晶器为刚性连接,所以偏心轴转角θp与结晶器振动位移xp存在如下确定的函数关系:
当偏心轴角位移θp跟踪上期望位移xpd对应的角位移θd时,结晶器振动位移xp便能跟踪上期望位移xpd.所以可通过对偏心轴转角的跟踪控制实现对期望振动位移的跟踪,以降低控制器设计的复杂度.然而,实际中偏心轴角位移不可直接测得,且由于伺服电机单方向带动偏心轴转动,导致角位移θp单调递增,所以振动位移xp到θp并非一一映射关系,因此无法直接通过对式(2)求逆解获得转角反馈量用于控制器设计.为了解决这一问题,文献[15]通过求取反正弦函数后,利用中心对称和周期的平移特性,建立如下区间内偏心轴转角与结晶器位移间一一对应的映射函数关系:
式中:tk0为第k0次到达波峰或波谷的时刻,k0的初始值为0,且t0=0;当|xp(t)|=h时,k0累加1,当k0为奇数时到达波峰,当k0为偶数时到达波谷.
因此,本文采用文献[15]建立的映射关系式(3)将位移反馈信号转化为转角反馈信号,为方便起见,用θ表示.则考虑转角跟踪控制的位移子系统状态方程可重写为
2.2 问题描述
由于结晶器振动装置长期处于高温及高粉尘的工作环境,系统可能发生伺服电机驱动单元中绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)故障或其供电电源缺相、电压突变等故障,这些故障均可以等效为位移子系统控制输入的损失,即执行器故障.定义x1=θ,x2=结合式(4),考虑执行器故障后连铸结晶器振动角位移系统(1)可重写为
本文针对伺服驱动单元IGBT故障或其供电电压突变等造成位移子系统控制输入iq发生偏置和部分失效的问题,定义故障信号函数if为[16]
式中:ρ为执行器失效因子;ς=a1+a2sin(a3t)为偏置故障,其在恒值偏置a1基础上,加上频率与给定信号相关的周期性信号a2sin(a3t),其中,a1,a2为未知常数;tf为故障发生时刻.当t≥tf时,if可以包含以下故障类型:
1)偏置故障:系统控制输入iq以未知函数ς发生偏置,即ρ=0,且a10;
2)复合故障:系统控制输入iq发生偏置故障的同时,又以ρ为失效因子产生部分失效,即0<ρ<1,且a10.
注1因为转速n与振动位移xp均可测,θ与振动位移xp存在映射关系式(2),则状态x1,x2可结合式(3)与式(4)计算获得.
本文的控制目标是保证结晶器振动位移系统在执行器故障及扰动存在的情况下,实际振动位移xp跟踪期望振动位移xpd.
3 执行器故障等不确定项的嵌套自适应观测器设计
由于故障和负载扰动同时存在,本节首先定义一个包含故障和扰动的综合不确定项Φ=bif+d,然后设计一种嵌套自适应观测器对其进行估计,以降低扰动和故障对系统性能的影响.
将式(5)中的角位移子系统简化为如下形式:
定义滑动变量
式中:l>0,β >0均为未知常数.
式中γ为大于0的常数.
基于式(7)–(13),本文对综合不确定项Φ构造的嵌套自适应观测器为
式中: λ1,λ2和λ3均是大于0的常数;ξ为辅助变量;为不确定项导数上界l的估计值.
引理1[17–18]如果在包含原点的邻域Ω ⊂Rn内存在连续可微的正定函数V(x)>0且V(0)=0,以及实数Γ >0,0<µ<1,σ >0,使得˙V(x)满足条件˙V(x) −ΓVµ(x)+σ 时,则系统状态x(t)可以在有限时间tob后,即当t tob时,收敛至如下原点附近的邻域内:
式中x0为系统的初始状态.
定理1基于假设1,本文针对系统(7)设计的嵌套自适应观测器(14)能够保证观测误差˜Φ在有限时间收敛到原点附近的邻域内.

结合式(12)–(13),对式(17)求导得
结合式(20)和引理1可知,s0将以t0为初始时刻,在有限时间t1=|s0(t0)|/η0内收敛到原点.
故式(23)可重写为
式中ε为死区区间,通常取值为0<ε<0.1.
4 基于嵌套自适应观测器的有限时间容错控制器设计
本节采用分层设计与终端滑模函数相结合的方法,对系统(5)进行有限时间容错控制器的设计,整体容错控制结构如图2所示.首先针对角位移子系统(7),基于观测器(14)设计全阶滑模控制器然后,针对电流子系统设计终端滑模控制器ud和uq,使交直轴电流iq和id分别跟踪上从而实现整个系统的容错控制.

图2 基于嵌套自适应观测器的结晶器振动系统有限时间容错控制结构图Fig.2 Structure of finite time fault tolerant control of mold vibration system based on nested adaptive observer
步骤1位移控制器的控制量设计如下:
位移控制器的设计过程主要包括设计滑模函数和基于滑模函数设计控制器.针对系统(7),本文采用如下全阶快速终端滑模函数s[19]:
结合式(32)–(34),设计FOSMC为
由于电流环为多输入控制,因此本节基于式(36)–(37),分别对电流子系统设计终端滑模控制器ud(TSMC1)和uq(TSMC2)为
式中:kq>mq>0;kd>md>0;ad,aq,bd,bq均为正标量,其中:ad,aq越大,位移跟踪精度越高,bd,bq越大,跟踪误差收敛速度越快.
定理2在满足假设1的条件下,针对结晶器振动角位移系统(5),基于嵌套自适应观测器(14)设计的位移控制器(35)及电流环控制器(38)–(39),能够保证闭环系统在故障if的影响下,其位移跟踪误差在有限时间内收敛到0.
证将式(7)(35)代入式(32)可得
结合引理1,并令σ=0可得,eq,ed能够在有限时间内收敛到原点,且收敛时间为
选取如下Lyapunov函数V:
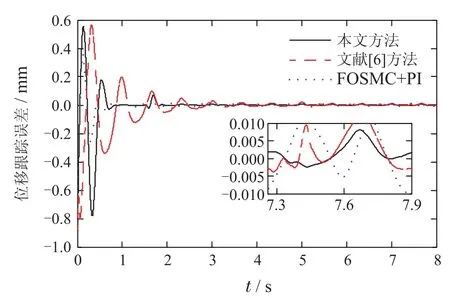
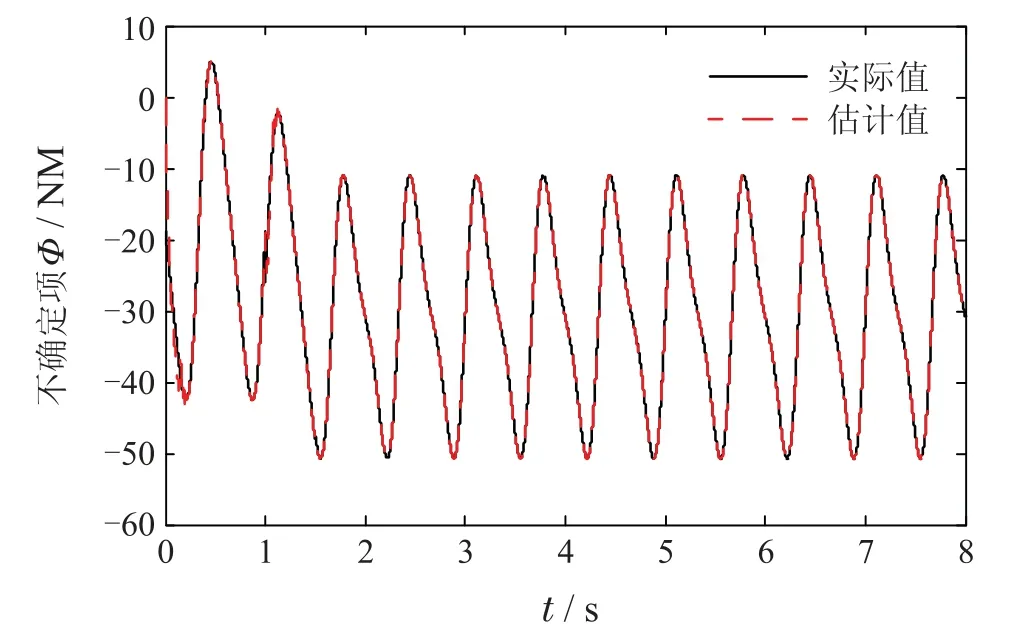
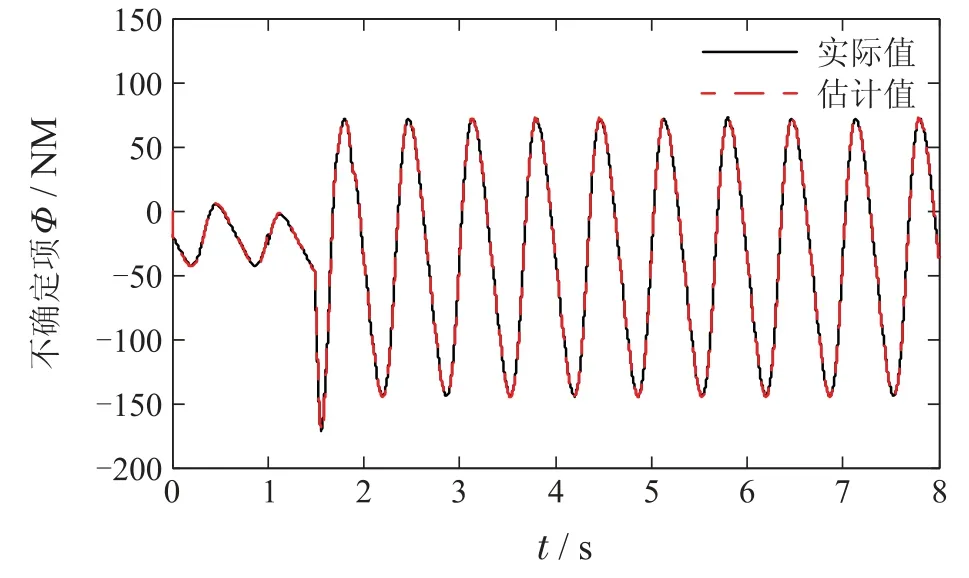
结合引理1及式(41)–(46)可知,V的导数满足−ζ|s|−bq|eq|(m+k)/k−bd|ed|(m+k)/k,则结晶器振动位移系统(5)的位移跟踪误差能够在有限时间内收敛到0,收敛时间为tc 计算获得,故有 τ通常取为采样周期. 注5为抑制符号函数sgn(·)产生的高频抖振问题,并提高控制信号的连续性,本文使用饱和函数sat(·)代替式(34)及式(38)–(39)中的符号函数sgn(·).饱和函数sat(·)设计为[20] 式中:ζ为较小的正标量,ζ越大,抖振越小,反之亦然. 为验证本文所提方法的有效性,本节针对连铸结晶器振动位移系统将本文所提方法与文献[6]方法及FOSMC+PI方法进行了仿真对比研究.仿真中的连铸结晶器振动位移系统参数均为实验室模拟振动台的实际参数:减速比i=5,电机极对数p=3,永磁体磁链ψf=0.96 Wb,粘性摩擦系数B=0.004,转子转动惯量J=0.0547 kg·m2,定子电阻Rs=0.14 Ω,结晶器振幅h=3 mm. 结晶器期望位移选择为德马克非正弦波形: 结合式(2)可得期望位移对应的转角为θd(t)=ω0t −Asin(ω0t),其中: 结晶器振动频率选为f=90 次/min,波形斜率α=0.24. 电机负载扰动(Nm)选为 考虑到复合故障包含偏置故障,因此本文给出如下两种包含不同失效因子的复合故障进行仿真研究,并且结合实际的位移控制信号iq电流数值,将复合故障的偏置恒值部分均取值为1(约为iq的10%):工况1,if=−0.2iq+1+sin(ω0t),t≥1.5 s;工 况2,if=−0.7iq+1+sin(ω0t),t≥1.5 s. 本文所提方法的主要控制参数取为:η=0.1,λ1=650,λ2=450,λ3=20,γ=30,ε=0.09,α2=0.5,α1=α2/(2−α2),kT=45,c1=30,c2=16,ζ0=0.1,aq=300,bq=2,ad=3,bd=0.6,mq=md=1,kq=kd=5. 文献[6]控制方法的主要参数取为:ξ1=280,ξ2=20,ξ3=15,其余参数保持与原文不变. FOSMC+PI方法的主要控制参数:电流环采用PI控制,参数分别取为kpq=35,kiq=850,kpd=10,kid=100;位移子系统采用本文所设计的全阶滑模控制器. 图3–4分别为2种故障工况下的结晶器振动位移跟踪曲线.从图3–4中可以看出,3种方法都能够使结晶器实际位移跟踪上给定位移,但FOSMC+PI和本文方法的初始偏差相对较小.这说明,相比于文献[6]方法,本文设计的FOSMC具有更快的跟踪速度. 图3 结晶器位移xp跟踪曲线(工况1)Fig.3 The traces of the mold displacement xp(Case 1) 图4 结晶器位移xp跟踪曲线(工况2)Fig.4 The traces of the mold displacement xp(Case 2) 图5–8分别为两种故障工况下的位移跟踪误差曲线和位移控制信号iq跟踪曲线.由图5–6可以看出,相比于文献[6]和FOSMC+PI方法,本文方法的位移跟踪精度较高.其中2种工况下本文方法的位移跟踪误差均在±0.008 mm以内.而由图7–8可以看出iq在PI控制下的跟踪精度远低于本文设计的终端滑模控制方法,因此造成FOSMC+PI控制方法的位移跟踪精度低于本文方法. 图5 位移跟踪误差曲线(工况1)Fig.5 Tracking errors of the mold displacement(Case 1) 图6 位移跟踪误差曲线(工况2)Fig.6 Tracking errors of the mold displacement(Case 2) 图7 位移控制信号iq跟踪曲线(工况1)Fig.7 The traces of displacement controller iq(Case 1) 为详细分析本文方法的控制效果,引入如下位移跟踪相对误差计算公式: 式中:E表示相对误差,e(r)表示r采样时刻结晶器振动位移跟踪误差值,xpd(r)表示r采样时刻结晶器振动位移的期望值,N表示用于分析的数据量.选取位移跟踪误差在4∼6 s之间的10000个数据,由相对误差公式可计算出2种故障工况下:文献[6]方法的相对误差分别为0.25%和0.22%;FOSMC+PI方法的相对误差分别为0.45%和0.33%;本文方法的相对误差分别为0.19%和0.15%,说明本文方法具有更好的稳态精度. 图8 位移控制信号iq跟踪曲线(工况2)Fig.8 The traces of displacement controller iq(Case 2) 图9–10为两种故障工况下,本文所设计观测器对综合不确定项的估计曲线.可以看出,本文所设计的嵌套自适应观测器能够快速精确地估计出系统中由故障和扰动构成的综合不确定项,从而提高了系统的控制精度和收敛速度. 图9 不确定项Φ估计曲线(工况1)Fig.9 The estimate of uncertainty Φ(Case 1) 本文针对存在伺服电机驱动单元执行器故障以及负载扰动的连铸结晶器振动位移系统的容错控制问题进行了研究,提出了一种基于嵌套自适应观测器的有限时间容错控制策略.该控制策略能够在无需知道故障和扰动上界信息的情况下,实现结晶器振动位移对期望位移的有效跟踪.理论分析表明,该方法通过选取合适的参数,能够实现闭环系统在发生执行器非全部失效故障的情况下所有状态在有限时间达到稳定.仿真结果表明,相比于文献[6],本文控制策略能够使系统具有更快的收敛速度和更好的控制精度. 图10 不确定项Φ估计曲线(工况2)Fig.10 The estimate of uncertainty Φ(Case 2)5 连铸结晶器振动位移系统有限时间容错控制仿真研究





6 结论
猜你喜欢
山东冶金(2022年2期)2022-08-08
防爆电机(2020年4期)2020-12-14
重型机械(2019年3期)2019-08-27
山东冶金(2019年2期)2019-05-11
测控技术(2018年12期)2018-11-25
制造技术与机床(2017年9期)2017-11-27
自动化学报(2016年8期)2016-04-16
自动化学报(2016年5期)2016-04-16
铁道科学与工程学报(2015年5期)2015-12-24
天津科技大学学报(2015年4期)2015-04-16