新能源同步机提升电网稳定性的运行特性分析
2022-03-23 04:56武倩羽黄永章杨鑫管飞李渝付文启
电气传动 2022年6期
武倩羽,黄永章,杨鑫,管飞,李渝,付文启
(1.华北电力大学新能源电力系统国家重点实验室,北京 102206;2.国网新疆电力有限公司,新疆 乌鲁木齐 830002)
截至2019 年6 月,我国可再生能源发电装机达7.5 亿kW,其中,风电装机1.93 亿kW,光伏发电装机1.86 亿kW[1]。高比例新能源发电已经成为热点关注的未来电力系统场景。
大规模新能源并网后,新能源的随机波动性和高度电力电子化特性致使电网的不确定性和脆弱性日益突出[2]。首先,同步交流电网的转动惯量变小,削弱了电力系统的动态调节能力[3];其次,新能源换流器的电压穿越能力不足,面对交直流混联大电网中常见的电压跌落及暂态过电压问题[4],易造成新能源大量脱网;另外,电力电子设备的频带大幅拓宽,新能源侧和电网侧的谐波和谐振交互问题变得日益复杂[5],特定的运行工况下电力电子设备在很宽的频段呈现的负阻尼特性加剧了系统振荡。
为改善新能源发电的惯性响应,文献[6]借鉴同步机的运动方程原理提出虚拟同步机(virtual synchronous generator,VSG)技术。文献[7-8]基于频率微分惯性控制、下垂控制,利用转子动能来实现双馈风机的惯性响应。然而虚拟惯量控制方法在风机转速恢复到最优值的过程中可能会导致电网频率的二次扰动[9]。文献[10]提出了一种基于变减载控制的光伏发电参与电网频率调节的控制方法,然而减载运行降低了新能源的利用率。
针对风机低压穿越方案主要包括改进硬件电路[11]、改进控制策略[12]以及附加储能装置[13]等。新能源机组高压穿越的主要措施包括增加静止同步补偿器、动态电压恢复器以及超级电容器等额外辅助设备[14]和改进控制策略[15]等,但电力电子器件固有耐压能力的限制给电压穿越技术带来了瓶颈。新一代调相机具备更优异的暂态、稳态特性和更强的无功调节能力,近年来受到了广泛的关注[16]。
在抑制大量新能源电力电子并网换流器引发的新振荡问题方面,文献[17]剖析了大规模风电在不同的场景下产生次同步振荡的机理和新特点;文献[18]通过风电机组的有功、无功调制来提供阻尼从而抑制区间振荡;文献[19]通过在风机并网换流器中引入附加阻尼控制器来提高阻尼,类似于同步电机励磁系统加装电力系统静态稳定器(power system stabilizer,PSS)的原理。
综上,在提高高比例新能源电网稳定性方面,现有的研究一定程度上借鉴了同步机的运动方程、惯性响应、励磁控制PSS等理论。调相机本质上是空载运行的同步电动机,可以有效提高系统的短路容量和旋转惯量,但调相机以并联的方式接入直流送受两端,由新能源侧和电网侧交互影响而引发的不稳定问题仍然是潜在的。另外,大多数电流源型换流器的控制前提是需要一个稳定的电网为其提供频率、电压基准和支撑,随着新能源渗透率的提高,替换的同步机越来越多,电网稳定性问题将愈发严重。
同步电动机-同步发电机对(motor-generator pair,MGP)新型并网方式为高比例新能源电网架构提供了一种新的思路[20]。文献[21]基于MGP 功角特性提出了源网相位差的控制方法,通过仿真和实验有效控制了新能源经MGP 并网的传输功率。本文通过阐述MGP的结构和功角特性,分析了MGP 的惯性水平及阻尼特性;研究了MGP 的功率反馈控制及电压反馈控制方法,并在实验系统中进行了验证;最后,对MGP 在未来高比例新能源电力系统中的应用进行了展望。
1 MGP运行原理
1.1 MGP结构
如图1 所示,MGP 并网系统由转子连接在同一根机械轴上的同步电动机和同步发电机构成。风电、光伏等新能源机组经过汇聚后驱动变频器带动同步电动机旋转,机械轴的旋转将带动同步发电机发电。MGP 两台电机的转子由联轴器连接,不考虑轴系扭转刚度时稳态条件下这两个转子将同速旋转。通过励磁控制系统来调节MGP的功率传输。
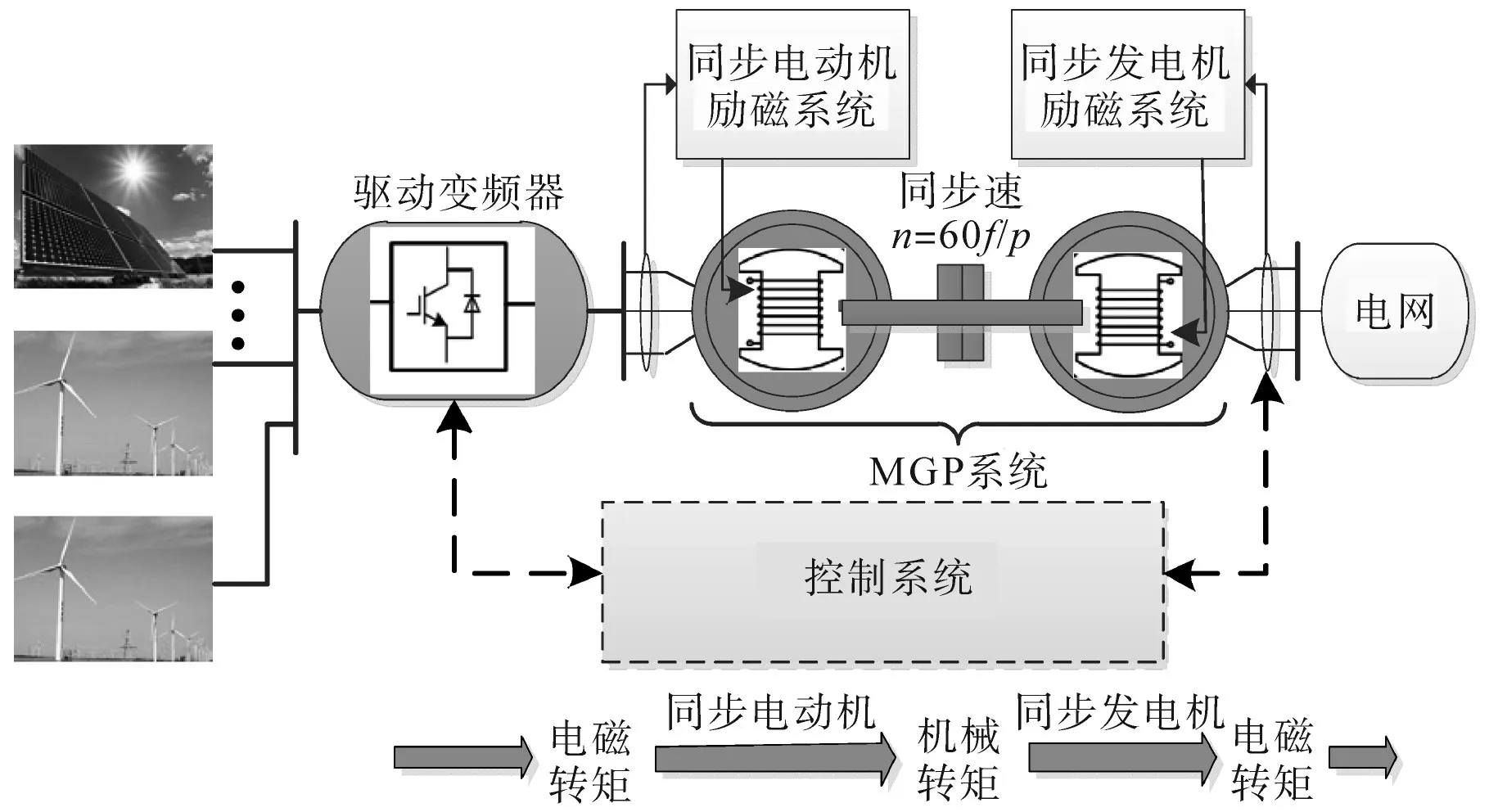
图1 MGP结构示意图Fig.1 Structure diagram of MGP
1.2 MGP功角特性
MGP 系统的功角特性如图2 所示,和为MGP 两台电机的内电势,带负载后,同步电动机和同步发电机将会产生两个功角δM和δG,参考量分别是MGP两侧的母线电压UBM和UBG。

图2 MGP系统的功角特性Fig.2 Power angle characteristics of MGP
若δMG为UBM和UBG的相位差,则有:

同步电动机和同步发电机的有功功率PM,PG分别可表示为

式中:Xc为电机同步电抗。
由式(2)、式(3)可知,在稳定运行范围之内,同步电机传输的有功功率与δM和δG有相同的变化趋势。两台同步电机的转子角速度相同,电气量上表现为和同速旋转。如图2所示,当MGP传输的有功功率增大/减小时,δM和δG会同时增大/减小,从而导致δMG的增大/减小。由此可知,MGP传输的有功功率与MGP 两侧电压相位差δMG有关,可以通过控制δMG来实现有功功率的调节。
2 MGP惯性水平和阻尼特性
2.1 MGP的惯性水平
新能源通过MGP 并网后可以为电网增加真实的转动惯量。转动惯量J是表征刚体转动惯性大小的物理量,可以用质量块来进行估算。以火电机组的真实轴系参数为参考依据[22],对比分析同容量MGP 的转动惯量大小。火电机组的机械轴系由励磁机、发电机、低压缸和高压缸4个质量块组成,MGP 系统由2 台同步电机和2 套励磁系统组成,由此可估算出MGP的转动惯量约为同容量火电机组的66%[23]。
转动惯量J可用惯性时间常数H来规范:

式中:ω0为额定角速度;SB为额定容量。600 MW 火电机组的H为6.636 s[22],因此同容量的MGP的H能够达到4.38 s。
风机、光伏等新能源的并网惯性完全来源于逆变器直流侧电容的储能,惯性时间常数HC如下式:

式中:C为逆变器直流侧电容;UC为电容电压;SN为新能源额定装机容量。
式(5)中,取UC为625 V,C为0.1 F,可求出600 MW 风场惯性时间常数HC为0.016 59 s。因此,MGP 惯性大约是同容量新能源机组的400 倍,可为高比例新能源电网提供足够量级的转动惯量来维持系统稳定。
2.2 MGP的阻尼特性
同步电机气隙电磁转矩中与转速偏差Δωr同相位的分量为阻尼转矩分量。在MGP 系统中转速的变化将会导致δM和δG同时变化,从而导致两台同步电机各自磁通的变化引起阻尼分量的叠加。本节在MGP 数学模型的基础上推导了MGP经典小干扰模型,具体分析阻尼叠加特性。
MGP 的输入转矩是同步电动机的电磁转矩TeM,标幺值下可表示为

输出转矩为同步发电机的电磁转矩TeG,标幺值下可表示为

两台同步电机的阻尼转矩叠加产生MGP 的阻尼转矩分量。
将式(1)线性化后用ΔδMG来替换ΔδG,可得以Δωr和ΔδMG为状态变量的MGP 小干扰状态方程如下式:
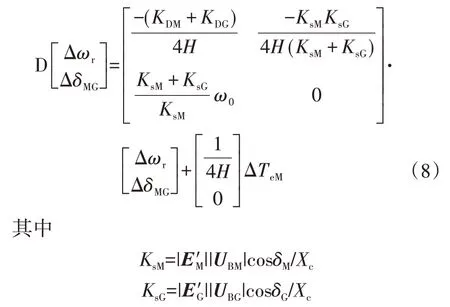
式中:D 为微分符号;ΔδMG为转子角偏差;KDM,KDG分别为电动机和发电机的阻尼系数;KsM,KsG为两台电机的同步转矩系数。
根据式(8)的特征值可求得MGP 阻尼比ζMGP为

在相同的状态方程形式下,同步发电机的阻尼比ζ为
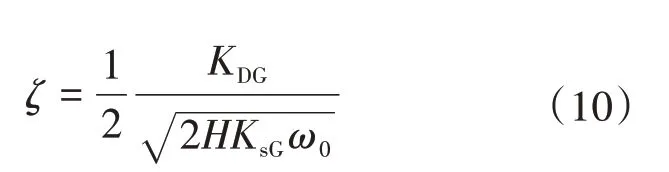
MGP 采用型号相同的两台同步机,联立式(9)、式(10)可推导得ζMGP和ζ的关系:
3 MGP的并网控制
3.1 基于源网相位差的功率反馈控制
由MGP 的功角特性可知,可以通过控制MGP 的功角δMG,即MGP 两侧电压相位差来实现传输有功功率的控制,控制框图如图3所示。

图3 MGP源网相位差控制框图Fig.3 Block diagram of source network phase difference control of MGP
以MGP并网侧的电压为参考,采集发电机侧电压UG、电流IG计算有功功率PG,若实际传输的PG大于目标功率Pref,增加变频器输出电压UM的频率fM来增大UM和UG相位差δMG,从而增加MGP传输的有功功率;若PG小于目标功率Pref,减小变频器输出电压频率fM来减小δMG,从而降低MGP有功功率。通过PI 控制器来实现有功功率的反馈控制,将MGP 实际传输的PG和目标功率Pref的差值作为PI控制器的输入,反馈计算出变频器输出电压的频率调节量Δf,进而改变变频器输出电压的相位,实现MGP有功功率的闭环控制。
为验证控制算法的可行性,搭建了5 kW 的MGP 实验系统,如图4 所示。由变频器驱动5 kW的交流同步电动机M 带动5 kW 的同步发电机G发电,两台电机的励磁绕组分别接24 V 的直流电源,电量变送器用于测量同步发电机G 向电网传输的有功功率P,PLC 中的控制算法加入了功率反馈调节,用于反馈计算和通信。

图4 MGP实验系统Fig.4 Experimental system of MGP
启动变频器带动MGP系统发电,检测到发电机电压UG和电网电压Ug相位重合时,将MGP 并网运行,设定PLC 控制板的Pref为300 W,稳定后测量MGP 输出的有功功率,同时测量MGP 两侧电压的相位差;改变PLC 控制板的Pref为800 W,稳定后再次测量MGP 传输的有功功率和两侧电压相位差。实验结果如图5 所示,当Pref从300 W增大到800 W 后,通过反馈控制MGP 两侧相位差δMG增大,MGP传输的有功功率也从300 W 增大到800 W,证明了源网相位差反馈控制方法可以实现MGP有功功率传输的有效控制。
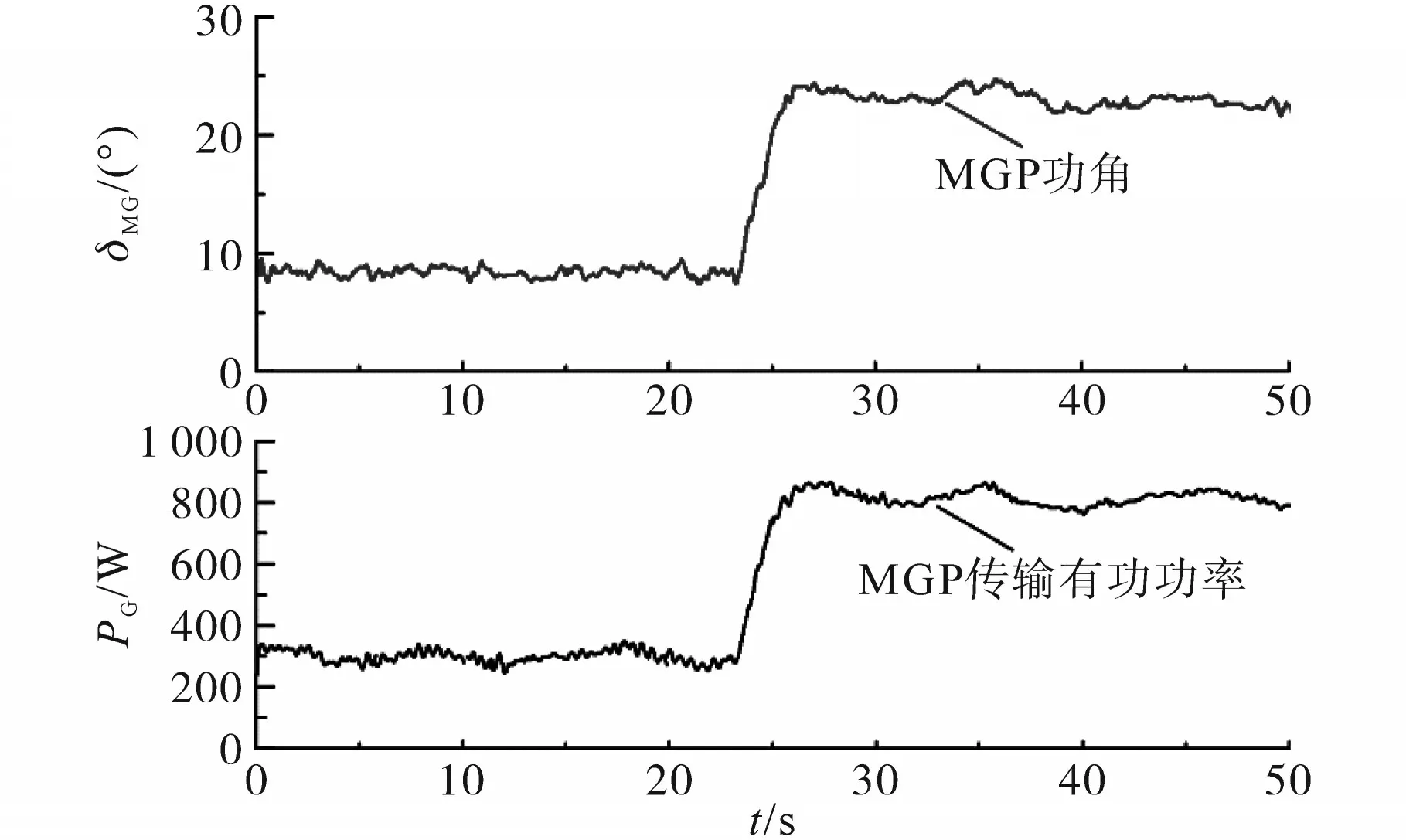
图5 功率反馈控制实验结果Fig.5 Experimental results of power feedback control
3.2 直流电压反馈控制
风机、光伏等新能源经过MGP 并网时,需结合新能源的运行特性研究MGP 传输有功功率的控制方法。本节以光伏为例,对新能源驱动MGP的控制方法进行说明。
光伏板发出的直流电经过逆变器并网时,光伏输出有功功率与并网逆变器的直流侧稳压电容的电压大小呈负相关,因此可以通过控制光伏板直流侧电压对输出功率进行控制。结合MGP的有功功率传输特性,光伏通过MGP并网的电压反馈控制如图6 所示。光伏输出有功功率Ppv变化时,直流侧电容电压Udc随之变化,此时以直流电压目标值Uref为参考计算出变频器的频率调节量Δf,控制并网逆变器输出的电压UM的频率fM从而改变MGP 的功角δMG,进而调节MGP 的输出功率PG。
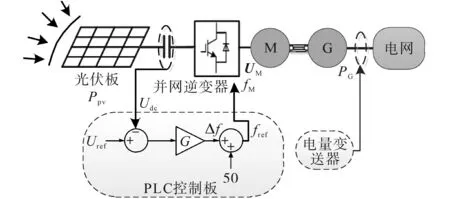
图6 MGP电压反馈控制框图Fig.6 Voltage feedback control block diagram of MGP
在图4所示的实验平台中,用一台10 kW光伏模拟器模拟光伏板,由PLC 直流电压反馈控制板来实现有功功率控制。给定光伏模拟器的光照曲线,将PLC 电压参考值Uref从550 V 降到520 V,直流侧电压Udc和MGP传输有功功率PG的变化如图7所示。
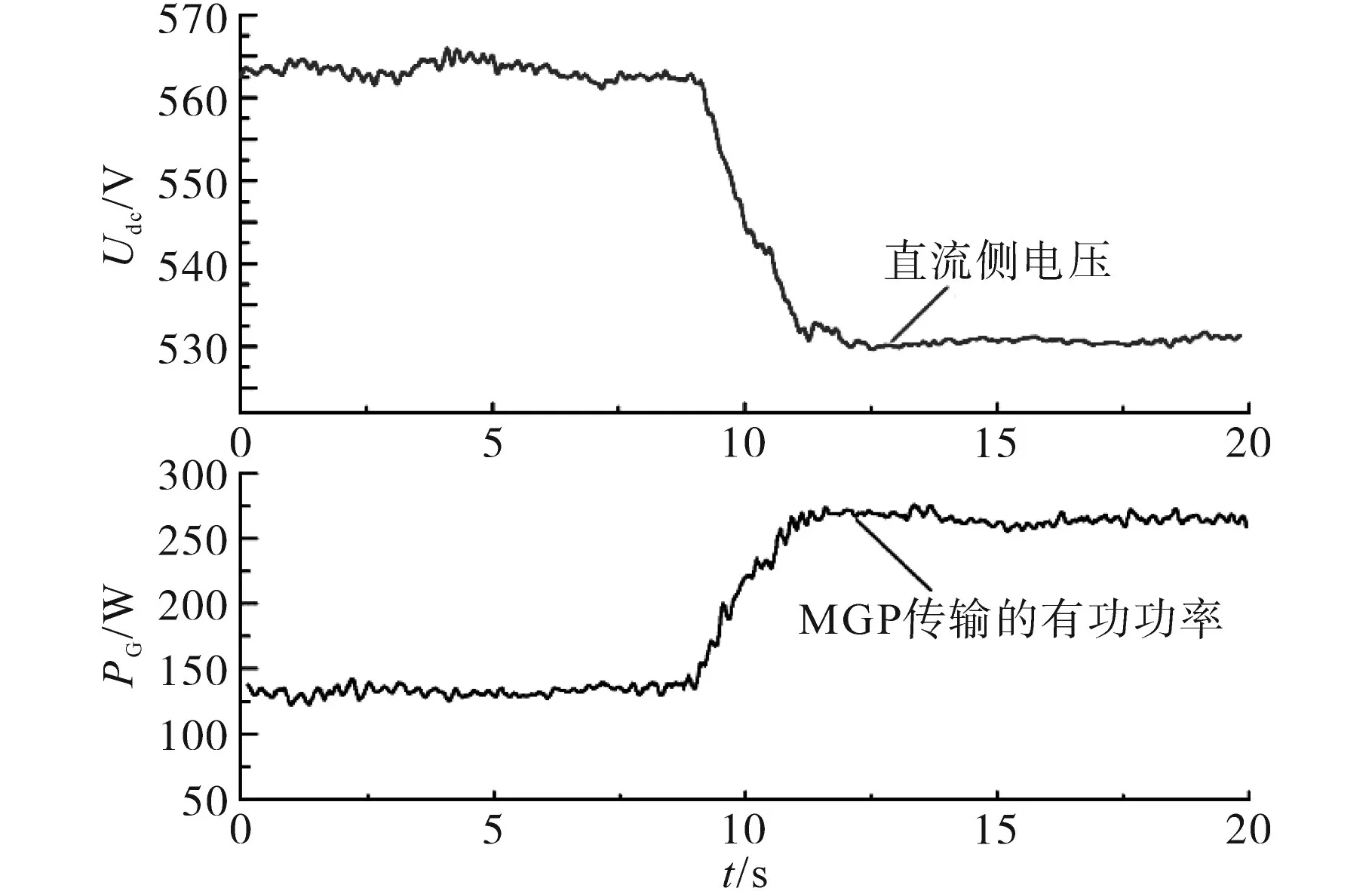
图7 电压反馈控制实验结果Fig.7 Experimental results of voltage feedback control
图7中实验结果证明了通过控制光伏并网直流侧电压可以控制MGP 的功率传输,为MGP 系统的后续研究提供了基础。
4 MGP应用展望
基于同步电机理论,MGP 从改变新能源并网方式的角度,为解决高比例新能源电网稳定问题提供了一种新的方案。根据以上对MGP 特性的分析,本文总结出了MGP在高比例新能源电网中的应用场景:
1)我国能源和负荷逆向分布的特点促使大容量、远距离特高压直流输电技术快速发展。在高占比新能源的送端电网中,由于新能源换流器短路容量和转动惯量不足,导致送端电网网架结构薄弱,“强直弱交”矛盾突出。MGP 可以有效增加系统的转动惯量和短路容量,为送端交流电网提供电压支撑从而提高电网强度,进而提高新能源并网和输送的可靠性。
2)在未来超高占比新能源电网中,可以考虑将部分比例的新能源通过MGP并网,为电力电子换流器提供基准和支撑,发挥电力电子器件和同步电机各自的优良属性来更好地保证电网的稳定运行。
MGP 在解决高比例新能源电网面临的稳定问题中的思路如下:
1)针对高比例新能源系统大量惯性缺失而导致的频率抗扰动能力下降的问题,MGP 真实可靠的转动惯量和惯性响应能够在扰动初期限制频率变化的速率,为电网的频率稳定提供可靠的支撑。另外,为了实现MGP对新能源设备的友好接入以及进一步发挥其对频率稳定的提升作用,可以利用MGP配合化学储能参与系统调频,同时降低新能源波动对电网带来的不稳定因素。
2)针对并网点暂态过电压和多次电压跌落问题,MGP较强的电压耐受和过载能力能有效提升新能源的故障穿越能力,减少新能源脱网的风险。此外,在特高压直流输电系统的送端,通过控制MGP 的励磁系统可以为电网提供无功功率和电压支撑,提高交直流混联系统的电压稳定性。
3)针对新能源换流器和电网交互影响产生新的振荡问题,MGP 的高阻尼特性可以有效衰减非工频谐波,其机械环节隔离了MGP两侧新能源电场和大电网的电气连接,有效阻止了一侧的不利扰动向另一侧传播,从而避免了双方交互影响导致的振荡扩大。
5 结论
针对高比例新能源电网所面临的各种挑战,本文提出了新能源采用MGP 并网的新方式,在5 kW 的实验平台中初步论证了MGP并网控制方法的可行性,并对MGP未来可能的优势及应用场景进行了展望。相关工作还在起步阶段,未来将针对大规模新能源逆变器如何汇聚启动MGP、大电网中仿真分析MGP的稳定性提升作用、基于经济最优如何配置MGP,协调MGP 和传统并网方式的比例进行深入探究。
猜你喜欢
山西大同大学学报(自然科学版)(2022年4期)2022-08-29
中学生数理化·八年级物理人教版(2022年3期)2022-03-16
辽宁丝绸(2021年2期)2021-12-23
军民两用技术与产品(2021年6期)2021-10-14
中学生数理化·八年级物理人教版(2021年3期)2021-07-22
防爆电机(2021年3期)2021-07-21
防爆电机(2021年3期)2021-07-21
南京大学学报(数学半年刊)(2020年1期)2020-03-19
物理与工程(2019年2期)2019-07-09
北方工业大学学报(2019年5期)2019-03-30