一种弹体入水冲击波阴影成像可视化系统及其试验研究*
2022-03-17 07:25姜雄文郭子涛
爆炸与冲击 2022年2期
赵 庚,陈 拓,姜雄文,郭子涛,张 伟
(1. 哈尔滨工业大学高速撞击动力学实验室,黑龙江 哈尔滨 150080;2. 中国矿业大学力学与土木学院,江苏 徐州 221116)
高速弹体入水产生的冲击波对弹体水下运动和毁伤效能有着重要影响。具体来说,高速弹体入水前,弹体在空气中产生的激波会与水面发生相互作用,导致气水界面的扰动,进而影响弹体入水的姿态。另外,高速弹体入水过程中产生的冲击波不仅会对水下目标造成一定的损伤,而且会对空泡扩展等造成影响,进而改变弹体的水下运动和毁伤效能。为清晰、连续地记录高速弹体入水产生冲击波的瞬态变化过程,可视化系统的设计就成为弹体入水冲击波试验研究的关键问题之一。国外学者已开展了一些弹体入水冲击波可视化方面的研究。在早期,McMillen 等首次采用阴影成像得到弹体垂直入水产生冲击波的可视化照片,通过冲击波阵面的宽度来识别波的强度,得到了部分冲击波传播的衰减特性。McMillen提出当入水弹体的速度足够大时,所形成的冲击波阵面呈椭圆形,而当弹体速度不够大时,冲击波阵面呈半球形。近年来,Yamashita 等开展了球形和细长弹丸高速(1.5~2.0 km/s)入水的初步试验,借助纹影法和阴影法分析得到弹体入水产生的初始冲击波大约以声速传播。Swanson在大量实验的基础上,将阴影图像与传感器测量结果相结合得出了冲击波强度衰减与弹体动能等的关系。罗小鹏等采用连续激光和脉冲火花光源拍摄了高速弹体斜侵彻入水流场的阴影和纹影照片,分析获得了弹体入水前,入水时及入水后的流场特征。周杰等同样对弹丸高速斜侵彻入水流场显示进行了初步研究,使用高速激光阴影和纹影技术得到了弹丸入水流场的演化图像,分析了入水前后弹体周围流场的变化,特别是水中冲击波的产生和传播。黄威等对高速弹体水平侵彻水箱产生的冲击波进行了可视化,总结了初始冲击波强度的衰减特性。然而,对弹体入水冲击波可视化的研究普遍存在成像视野较小的问题。因此,扩大成像视野对于开展充水容器中弹体入水冲击波传播及弥散方面的可视化研究具有重要的实际意义。
弹体入水冲击波可视化研究主要需要借助纹影成像和阴影成像,这两种技术都是基于密度场的光学测量技术。对于可压缩流动来说,密度的不均匀性对应折射率的不均匀性,由此导致光学的不均匀性。纹影成像的原理是利用透镜将有限大小的光源发出的光汇聚成平行光线,经过流场之后再汇聚到焦点处,在焦平面上放置一个刀口即构成了简单的纹影装置。当平行光线受到流场扰动时会向密度较高的区域偏折,利用刀口切掉某一方向的偏折光线,焦平面之后的光强分布反映流场的密度梯度沿刀口切割方向的变化。光屏放在焦平面之后即可获取流场扰动的图像。阴影成像的原理是将点光源发出的光线通过待测流场照在观察屏上,当流场出现扰动时,观察屏上就会出现阴影。两种技术相比较而言,纹影成像技术的光路系统复杂,调试难度大,不适用于大视场实验。而阴影成像技术的光路系统简单,容易调试,可为大视场实验提供强有力的解决方案,对流场冲击波和扰动可视化研究具有简单性和通用性,其中直接阴影成像法最为简单,但可靠点光源的缺乏是阻碍其发展应用的瓶颈。相关研究主要采用大功率高频近红外激光光源,激光强烈,容易对人造成灼伤致盲,且空间相干,满足要求的光源价格昂贵,一般成像常用的LED 光源亮度不够。短弧氙灯是一种高亮度,显色性好的光源,不存在灼伤致盲的风险,但满足阴影成像的点光源不易获取,且价格昂贵。因此,研制可靠的点光源对弹体入水冲击波可视化研究十分必要。
本文基于中国生产的短弧氙灯灯管,自制易于操作、安全且满足成像要求的短弧氙灯点光源,并根据阴影成像原理设计一种弹体入水冲击波阴影成像可视化系统;运用该系统对高速弹体入水进行试验研究,测量弹体入水冲击波的阴影成像和冲击波信号的压力时程曲线,将阴影成像和冲击波信号相结合来分析弹体入水冲击波的传播特性,并对其进行理论验证。
1 弹体入水试验
1.1 短弧氙灯点光源
基于国产短弧氙灯管自制的短弧氙灯点光源包括冷却风扇、电极散热片、短弧氙灯灯管、平凸透镜、圆筒、调整机构、支承底座、球面反射镜、机箱、控制电源(未图示)等,点光源如图1 所示。

图1 点光源示意图Fig. 1 Schematic diagram of point light source
短弧氙灯点光源工作时,短弧氙灯管的正极和负极均与电极散热片连接,防止电极过热;短弧氙灯管通过底部的散热片与调整机构连接,而调整机构与机箱进行固定;短弧氙灯管的正负极分别与控制电源(未图示)的正负极连接;在球面反射镜的前面安装短弧氙灯管,短弧氙灯管的弧隙位于球面反射镜的焦点处,球面反射镜通过调整装置与机箱进行固定;在短弧氙灯管的前面安装平凸透镜组,平凸透镜组包括三个平凸透镜,短弧氙灯管的弧隙位于平凸透镜的焦点处;平凸透镜组通过圆筒固定并安装在机箱上,固定透镜组的圆筒可沿其中心线相对机箱进行位置调整,平凸透镜组将平行光汇聚在其焦点处;冷却风扇与短弧氙灯管同轴安装在机箱的顶部,通过吹入冷风,实现对所述短弧氙灯灯管、球面反射镜和平凸透镜组等的冷却散热;机箱通过支承底座和高度调整机构与地面或者工作台面接触。
1.2 阴影成像可视化系统及其试验


图2 弹体入水冲击波的阴影成像可视化系统Fig. 2 Shadowgraph visualization system of shock waves caused by water-entry projectiles
图3 给出了试验的布置情况。试验所用弹体为直径6 mm 的钢球,质量为0.9 g。弹体发射装置为气炮,它由铝型材结构支撑固定在水箱的上方,可通过调节气炮的位置控制发射子弹的速度方向,通过控制气室内压力的大小控制发射子弹的速度大小。将气炮、高速相机和计算机利用触发器连接在一起,当按下触发器时三者同时工作,这样可以保证试验数据的获取。试验时,高速相机拍摄帧率为20 000 s,分辨率为512×688,曝光时间为1 µs。在高速相机的相机镜头上安装紫外线滤光镜(ultra-violet, UV),在UV 镜的中心粘贴10 mm 的直径杆镜,UV 镜的作用是在不损坏相机镜头的前提下,将杆镜固定在高速相机镜头的中心轴线上;短弧氙灯点光源与超高速数字相机的轴线成90°角, 短弧氙灯点光源中直径为75 mm、焦距为200 mm 的平凸透镜将平行光汇聚到其焦点处,并经杆镜以光锥反射到正投反光屏,这里要保证光锥的中心与高速相机的镜头的中心同轴以避免造成双重阴影图像;如果在位置处有扰动或者透明的物体,就会因光线的弯曲折射在正投反光屏上形成直接阴影,通过高速相机记录下来。

图3 实验装置Fig. 3 Experimental set-up
水箱前后侧面为透明PC 窗口,便于观察记录弹体在水中运动轨迹及冲击波的变化。水箱尺寸为310 mm×334 mm×542 mm,试验时水箱不注满水,水深400 mm,这样是为了观察子弹在入水之前的状态。实验所用压力传感器灵敏度为2 370.4 pC/MPa,量程为10 MPa,谐振频率不低于50 kHz,上升时间不超过10 µs。传感器粘贴在右侧水箱水面以下300 mm 壁面位置处,水箱及传感器布置如图3 所示。试验电荷放大器设置通道的电荷放大倍数为0.1。试验所用示波器的通道量程为10 V,1 通道为触发源通道,触发电压为100 mV~2 V,触发模式为上升沿触发,耦合方式为直流,采样率为2.5×10s。试验时传感器采集到的压力信号需要经由电荷放大器放大显示到示波器上。传感器、电荷放大器和示波器组成了该系统的冲击波信号采集部分。
2 结果分析和讨论
本文试验可利用提取高速相片像素点和标定相片中的几何尺寸的方法,可以建立空间坐标系来描述弹体及冲击波的运动。利用可视化系统获取弹体入水产生冲击波的阴影成像,利用压力传感器、电荷放大器及示波器等获取冲击波信号大小等信息。以直径6 mm 的钢球高速垂直入水为例,分析高速弹体入水产生冲击波的过程及传播特性。
2.1 弹体入水冲击波的阴影成像
弹体出炮口产生的冲击波如图4 所示,可以清晰地看到炮口冲击波和弹体在空气中产生的尾激波和弓形激波。图5 给出了弹体入水及空泡扩展过程,可以清晰的看到弹体在空气中产生的激波,弹体入水后初始冲击波的产生以及传播过程,图5 中以弹体进入水箱的时刻为时间零点。
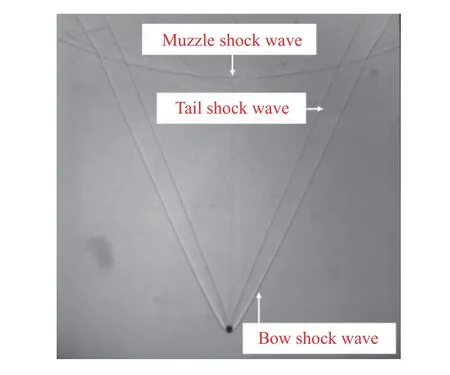
图4 球形弹体出炮口产生的冲击波Fig. 4 The shock wave generated by the spherical projectile exiting the gun

图5 弹体入水及空泡扩展过程Fig. 5 Processes of the projectile entering the water and its cavity expansion
如图5 所示:0 ms 时刻,弹体距离水面一定距离,空气和水位置处的亮度都比较均匀,其中水的亮度弱于空气,空气和水的交界面为一道明显的黑色水平线;0.05 ms 时刻,弹体接近水面,弹体头尾均有斜激波产生,分别是头部的弓形激波和尾激波,由于相机拍摄帧数的限制,未看到弹体头部激波与水面的相互作用过程;根据0 和0.05 ms 弹体中心位置处像素点坐标信息等可以得出弹体入水前的速度大小为1 072 m/s,炮口位置距离水面较远时,未看到弹体发射时炮口冲击波对于水面的影响,如果将炮口位置下移,则可以看到炮口冲击波对于水面的影响;0.10 ms时刻,弹体撞击水面在水中产生半球形冲击波,冲击波在弹体运动的前方,空气中的斜激波与水面相交,弹体高速入水产生空泡和空化,同时弹体撞击水面产生喷溅,光线在这些区域发生折射和散射,没有到达后方的正投反光屏,在阴影成像的照片中呈现黑色;0.15 ms 时刻,弹体继续侵彻水,水中产生的半球形冲击波的半径不断变大,初始冲击波在开始时刻,球形波纹很明显,这意味着冲击波的强度最大,空泡及水面喷溅显著变大,空气中的斜激波不断向两侧移动,同时在水面喷溅区上方也产生了向上的激波,这是弹体头尾部产生的斜激波在空气和水的交界面反射形成的;根据0.10 和0.15 ms 半球形冲击波波前中心位置处像素点坐标信息等可以得出这个时间段水下冲击波平均速度大小为1 571 m/s;根据0.10 和0.15 ms 弹体中心位置处像素点坐标信息等可以得出这个时间段子弹平均速度大小为892 m/s;0.20 ms 时刻,水中初始产生的半球形冲击波半径不断变大,冲击波作用到水箱两侧的壁面;水箱侧面壁面处的压力传感器开始记录冲击波信号;空泡及水面喷溅不断变大,两侧的斜激波和向上的反射激波继续传播,随后碰到水箱两侧的壁面发生反射,但是空气中的激波并未引起空气和水界面处的明显变化;根据0.15 和0.20 ms 空气中向上激波中心位置处像素点坐标等信息可以得出这个时间段空气激波平均速度大小为418 m/s,空气中的激波速度要比水中冲击波的速度低很多,这是由于水中声速要比空气中的声速高很多,0.25 ms 时刻,可以看到在初始冲击波后面还有两道比较明显的冲击波出现,这是球形冲击波作用到前后PC 板上形成的;作用到水箱两侧壁面的冲击波发生反射向中心传播;0.30 ms 时刻,作用在水箱两侧壁面发生反射的冲击波在水箱中心相交,并与空泡区域重叠;0.45 ms 时刻,水中向下传播的冲击波碰到水箱底部发生反射开始向上传播,向两侧壁面传播的冲击波也发生反射开始向水箱中心传播,此时水下冲击波的传播方向与弹体的运动方向相反;0.65 ms 时刻,水中向上传播的冲击波到达水面发生反射,开始向下传播;0.70 ms 时刻,水中两侧的冲击波在水面及两侧水箱壁面发生反射也开始向下传播;根据0.65 和0.7 ms 冲击波处像素点坐标信息等可以得出这个时间段水下冲击波平均速度大小为1 518 m/s;根据0.65 和0.70 ms 弹体中心位置处像素点坐标信息等可以得出这个时间段子弹平均速度大小为250 m/s;与弹体入水初期0.10 至0.15 ms 相比,在相同的时间间隔内,水中黑色区域头部移动的距离不断减小,弹体速度显著降低;这是由于水的密度大,球形钢弹质量小,弹体高速入水后,水对弹体的阻力很大,弹体速度衰减很快;随着冲击波的向前传播,并在水箱壁面和水面处反射,冲击波的波纹逐渐减弱,冲击波强度逐渐降低,水中冲击波的传播速度不断降低;球形冲击波的半径逐渐增大,后期向下传播的冲击波几乎成为平面。
本文利用阴影成像清晰展示了球形弹体高速入水过程中初始冲击波的产生及其反射波的情况。冲击波传播过程中的明显程度代表了冲击波的强度,但只借助图像处理很难定量地分析冲击波的传播特性,而且对于一定范围的成像视野,高速相机所能达到的帧数有限。如图5 所示,0.25 ms 时刻后,初始冲击波通过传感器所在位置,0.40 ms 时刻前后,侧壁反射波传播到传感器位置。冲击波传播路径如图6 所示,容器中水深=0.4 m,容器直径为0.31 m,传感器位置到水面距离=0.3 m,弹体沿容器的对称中心垂直入水。由于两点之间直线最短,撞水点与的连线是初始冲击波传播到传感器的最短波程。以侧壁为对称轴,将撞击点和入射路径镜像至水箱外侧,新生成的水箱外对称点和的连线是反射波传播到传感器的最短波程。按照初期冲击波的平均波速1 550 m/s 来估算,初始冲击波和第一次反射波到达传感器的时间差约为0.14 ms。下面可结合冲击波信号采集部分测得的压力信号对冲击波传播做进一步的分析。

图6 冲击波传播路径Fig. 6 Propagation path of the shock wave
2.2 冲击波信号
冲击波信号采集是弹体入水试验的重要部分。冲击波传播过程中到达传感器位置处,信号采集部分就会捕捉到压力信号,然而只凭借传感器测得的压力信号,很难判断分析初始冲击波后的压力峰值是水箱侧壁还是底部反射波导致的。阴影成像照片清晰展示了冲击波与水箱壁面的相互作用,阴影成像和冲击波信号相结合可以更好地分析冲击波的传播特性。
2.2.1 冲击波信号的处理
提取试验中冲击波原始信号如图7 所示。利用自编软件实现对压力信号的处理和分析,具体如下:首先,冲击波信号到达传感器之前的时间可以看做是示波器自身产生的噪声阶段,其值应该在零附近。然后,对传感器这段时间的信号去趋势项,得出原始记录与去趋势项后的记录的差值,用原始记录减去这个差值,即可得所有时间段的去趋势项处理后的记录。为了寻找到冲击波波前到达传感器时的压力信号峰值,以及峰值到达时刻,接着对信号进行平滑处理,增加记录的信噪比。最终,经过上述处理后的记录乘以电荷放大系数即可得冲击波压力值,冲击波的压力时程曲线如图8 所示。第1 个波峰代表初始冲击波的压力峰值,峰值大小为1.605 MPa,第2 个波峰代表第1 次反射波的压力峰值,两个压力峰值的时间差接近0.14 ms,与阴影成像中分析的时间差一致,随着冲击波传播并在水箱壁面和水面处不断反射,冲击波强度逐渐降低。

图7 原始冲击波信号Fig. 7 Original shock wave signal
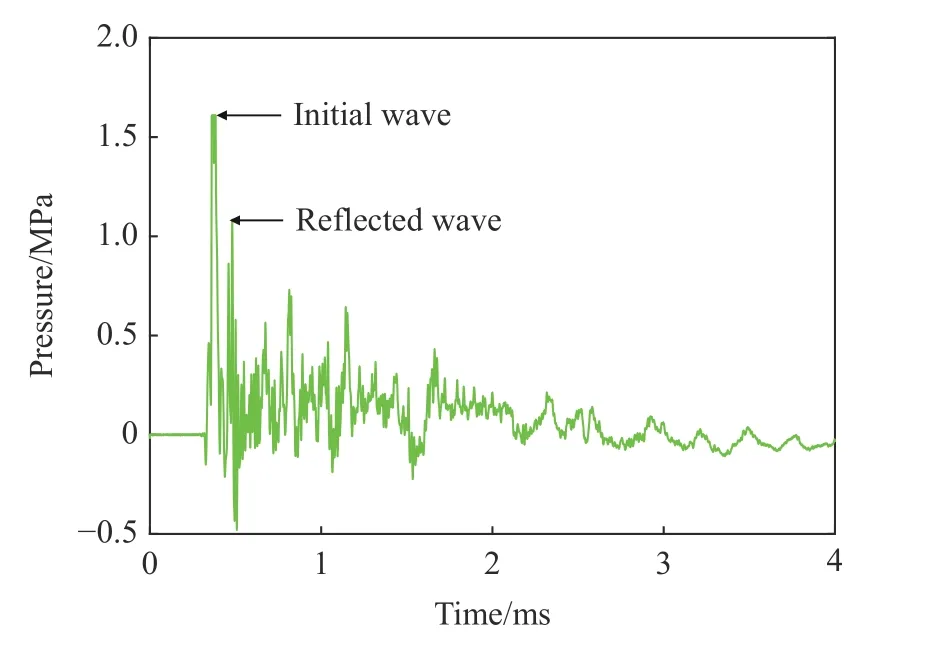
图8 冲击波压力时程曲线Fig. 8 Shock wave pressure time history curve
2.2.2 冲击波信号的理论验证
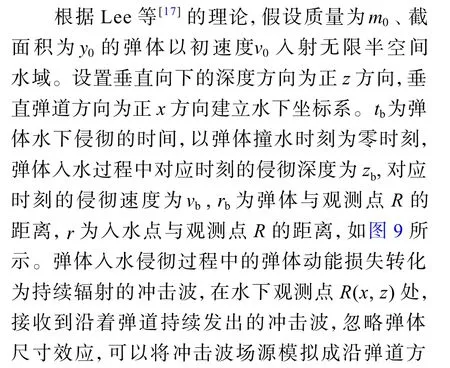

图9 冲击波场源与观测点Fig. 9 Shock wave field source and observation point

3 结 论
基于国产短弧氙灯管自制了短弧氙灯点光源,利用自行设计的弹体入水冲击波阴影成像可视化系统进行了弹体入水试验研究。结合阴影成像和冲击波信号相结合分析了弹体入水冲击波的传播特性,并进行了理论验证,结果表明:
(1)该弹体入水冲击波阴影成像可视化系统具有可靠性和设计的合理性;
(2)弹体高速入水后,初始冲击波的强度最大,随着冲击波的传播,冲击波强度逐渐降低,水中冲击波的传播速度不断降低,球形冲击波的半径逐渐增大。
猜你喜欢
弹箭与制导学报(2022年4期)2022-10-12
兵工学报(2022年7期)2022-08-02
中国典型病例大全(2022年12期)2022-05-13
爆炸与冲击(2022年2期)2022-03-17
爆炸与冲击(2022年1期)2022-02-11
科学与财富(2021年36期)2021-05-10
科技风(2018年28期)2018-05-14
小雪花·成长指南(2015年10期)2015-10-23
中国民族民间医药·下半月(2014年4期)2014-09-26