机械臂系统快速有限时间有界H∞量化跟踪控制
2022-03-15 10:44:20李小华杨瑞芳
安徽大学学报(自然科学版) 2022年2期
杨 伊,李小华,杨瑞芳
(辽宁科技大学 电子与信息工程学院,辽宁 鞍山 114051)
机械臂是具有高度复杂时变耦合动力学特性的非线性系统. 有关机械臂系统的控制方法主要有: PID(proportion integration differentiation)[1-2]、自适应[3-4]、backstepping[5-9]、 鲁棒控制[10-12]等. 有限时间控制由于具有快的收敛性和强的鲁棒性, 已成为系统控制的研究热点[13-15]. 文献[16]设计了机械臂系统渐近稳定时的有限时间H∞控制器. 文献[17]研究了系统有界稳定时的有限时间H∞控制, 设计的控制器能保证机械臂系统有限时间稳定, 且能降低外部扰动的影响.
指令滤波技术不仅能解决backstepping方法的“微分爆炸”问题, 还能避免虚拟控制器求导过程中出现奇点[18-19]. 随着网络技术的成熟, 可对机械臂进行远程控制. 在网络控制中, 为了解决信号传输过程中的数据包丢失和传输速度不高的问题, 要对输入进行量化[20-21]. 文献[22]对机械臂系统的量化控制进行了研究.针对受外部干扰的量化输入单连杆机械臂系统, 该文拟利用backstepping方法, 结合指令滤波技术、量化控制、快速有限时间控制及H∞控制,设计快速有限时间有界H∞量化跟踪控制器.
1 系统描述和预备知识
1.1 系统描述
考虑电机驱动的单连杆机械臂系统, 其数学描述[23]为
(1)

(2)
为了方便, 将式(2)改写为
(3)

(4)
其中:ui=ρ1-iumin,i=1,2,…;δ=(1-ρ)/(1+ρ), 0<ρ<1,ρ为量化密度的测量值;q(u(t-)) 为q(u(t))左邻域的值,q(u(t))的死区范围为umin>0.由式(4)可知q(u(t))∈{0,±ui,±ui(1+δ),i=1,2,…}.根据文献[24], 可将q(u(t))改写为
q(u(t))=G(u)u(t)+D(t),
(5)
其中:1-δ≤G(u)≤1+δ, |D(t)|≤umin.
假设1参考输入yr及其各阶导数是已知函数且连续有界.
该文的控制目标是: 设计机械臂系统(3)的快速有限时间有界H∞量化跟踪控制器, 使系统输出在有限时间内能跟踪给定的参考信号,且系统对外界干扰具有有界H∞抑制性能, 同时保证闭环系统是快速有限时间有界的.
1.2 预备知识
利用径向基函数(radial basis function,简称RBF)神经网络逼近未知非线性函数f(Z),其表达式为
f(Z)=W*TS(Z)+δ(Z), ∀Z∈Ξ⊂m,
(6)
其中:m为正整数;W*T为理想的常数权向量;输入向量Z=[z1,z2,…,zn]T;基函数向量S(Z)=[s1(Z),s2(Z),…,sl(Z)]T∈l;δ(Z)为估计误差,且满足|δ(Z)|≤ε,ε为有界正常数;si(Z)为高斯函数, 其表达式为
(7)
其中:μi为基函数的中心,vi为高斯函数的宽度.
引理1[25]若S(Z)与S(Zl)均为RBF神经网络基函数向量,Z=[z1,z2,…,zn]T,Zl=[z1,z2,…,zl]T均为输入向量,l和n均为正整数,且满足l≤n,则有下式成立
‖S(Z)‖2≤‖S(Zl)‖2.
(8)
引理2[17]对于任意实数ε>0,下面不等式成立

(9)
其中:p>1,q>1, (p-1)(q-1)=1.
引理3[18]对于正常数m0,n0,ω0及实变量φ0,ψ0,下列不等式成立
(10)
引理4[17]假设x,ψ,χ在t∈[a,b]上是实连续函数, 且χ(t)≥0,若

(11)
则有
(12)
引理5[17]对于li∈,i=1,2,…,n和实数ρ∈(0,1),有下面不等式成立
(|l1|+|l2|+…+|ln|)ρ≤|l1|ρ+|l2|ρ+…+|ln|ρ.
(13)
(14)
则系统是快速有限时间有界的, 其停息时间满足
(15)
其中: 0<θ0≤1.
(16)

-φ1(V(x)+k0)-φ2(V(x)+k0)λ+β.
(17)
因此,有
-φ1V(x)-φ2Vλ(x)+β.
(18)
根据引理6及式(18),可知系统是快速有限时间有界的.
定义1对于系统(3), 如果满足:
(2) 下式成立
(19)
其中:z1为系统跟踪误差;V(x(0))为正常数;ω=[0,ω2,ω3]T为非零外部干扰;φ1,φ2,β均为正实数;γ为给定的干扰抑制系数.
则系统(3)具有快速有限时间有界H∞性能.
2 控制器设计
该节将给出控制器设计的具体过程. 为了避免对虚拟控制器反复求导,引入如下的1阶低通滤波器
(20)
其中:τi(i=1,2)为滤波时间常数,αi为设计过程中的虚拟控制,si为滤波器输出. 取如下坐标变换
zi=xi-si-1,
(21)
vi=zi-ei,
(22)
其中:s0=yr,ei(i=1,2,3)为补偿信号,vi为跟踪误差的补偿量.
控制器设计的步骤如下:
第1步 根据坐标变换(21), 可得系统(3)的误差为
(23)
根据式(22),有
(24)
选取Lyapunov函数为
(25)
对V1求导,可得
(26)
选取虚拟控制律及误差补偿信号分别为
(27)
(28)
其中:e1(0)=0,c1>0,k1>0, 0.5<λ<1.将式(27)~(28)代入式(26)中,可得
(29)
第2步 由坐标变换z2=x2-s1,有
(30)
根据式(22),有
(31)
选取Lyapunov函数为
(32)

对V2求导并结合式(31),可得
(33)
根据引理2,有
(34)
将式(34)代入式(33),可得
(35)

(36)
根据引理1,2, 可得
(37)

(38)

(39)
(40)
(41)
其中:e2(0)=0,c2>0,k2>0,r2>0,σ2>0.将式(39)~(41)代入式(38),可得
(42)
第3步 根据坐标变换方程z3=x3-s2及系统(3)的第3个状态方程, 可得
(43)
根据式(22),有
(44)
选取辅助Lyapunov函数为
(45)
其中:设计参数r3>0,任意常数k0>0.
对式(45)求导再结合式(5),可得
(46)
根据引理2, 可得
(47)
(48)
其中: |D(t)|≤umin.将式(47)~(48)代入式(46),得
(49)

(50)
由引理2, 可得
(51)
将式(51)代入式(49),有
(52)
选取实际控制律为
(53)
(54)
(55)
其中:e3(0)=0,c3>0,k3>0,r3>0,σ3>0.将式(53)~(55)代入式(52), 可得
(56)
选取系统(3)的总Lyapunov函数为
(57)
根据式(29),(42),(56),可得
(58)
定理1若机械臂系统(3)满足假设1, 且补偿误差信号为式(28),(40)及(54), 自适应律为式(41),(55), 虚拟控制律为式(27),(39), 实际控制律为式(53), 则有:
(1) 闭环系统是快速有限时间有界的;
(2) 系统对外界干扰具有有界H∞抑制的性能.
证明(1) 闭环系统是快速有限时间有界的.令外部扰动ω2=ω3=0,则式(58)可改写为
(59)
式(58)可进一步改写为
(60)
其中:σmin=min{σj},2≤j≤3.
(61)

(62)
将式(62)代入式(61),可得
(63)

(64)
将式(63),(64)代入式(60), 可得
(65)
(66)
(67)
其中:cmin=min{ci},1≤i≤3,C=2λcmin.将式(66)~(67)代入式(65), 可得
(68)
根据引理5,有
(69)

由引理6和推论1可知,闭环系统是快速有限时间有界的.
(2) 系统对外界干扰具有有界H∞抑制性能. 由式(58),(63)可得
(70)
定义辅助函数
(71)
将式(70)代入式(71),可得
H≤ζ,
(72)

(73)
其中:未知常数ρ>0.将式(73)代入式(70),可得
(74)
对式(74)两边积分,可得
(75)

(76)
假设ψ(t)≤0,则有
(77)
可见式(77)与(57)矛盾,则有
(78)
式(78)可改写为
(79)
因此,定理1得证.
3 仿真实验

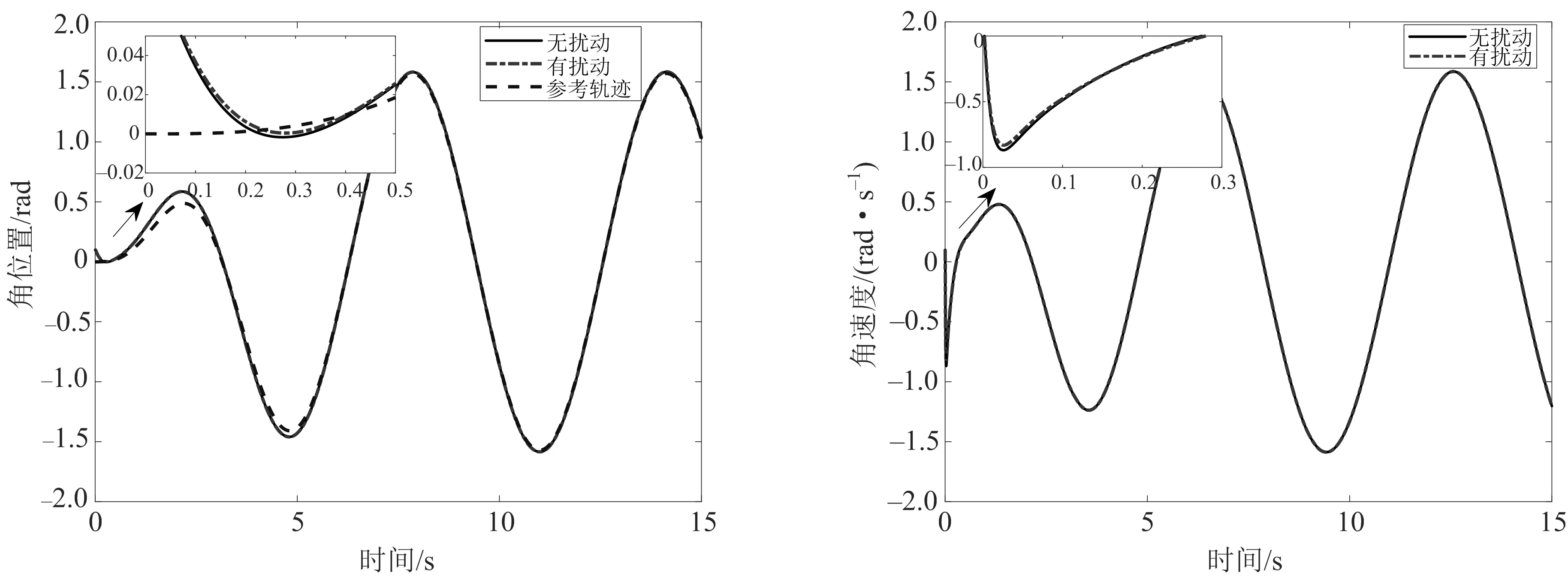
图1 连杆角位置及其参考轨迹 图2 连杆角速度
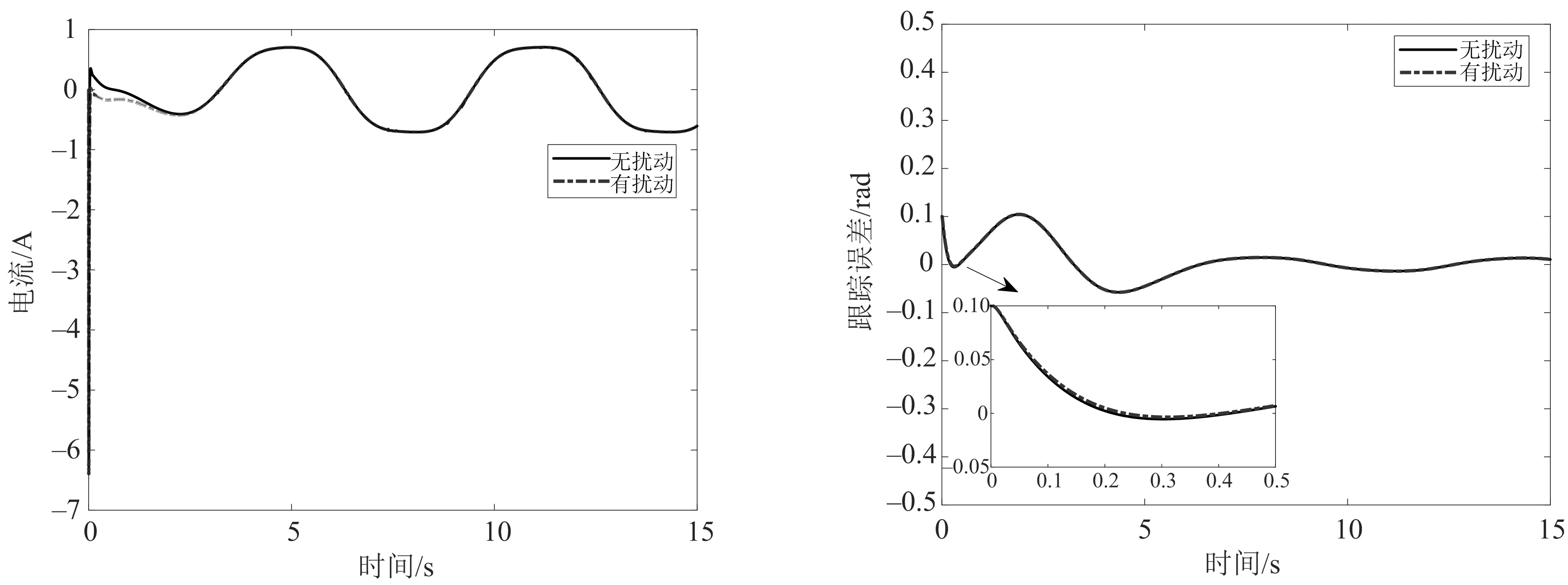
图3 系统电流 图4 连杆角位置的跟踪误差

图5 无干扰时控制输入及量化输入 图6 有干扰时控制输入及量化输入
从图1可看出,系统输出能在有限时间内很好地跟踪参考轨迹, 有外部扰动时, 控制效果仍然很好. 从图1~ 3可看出,系统所有状态为有界的. 由图4~6可知, 该控制器在量化输入下仍能很好地控制目标,即该控制器具有有效性.
4 结束语
该文研究了量化输入的电机驱动机械臂系统的快速有限时间有界H∞量化跟踪控制问题, 设计了基于指令滤波的神经网络快速有限时间有界H∞量化跟踪控制器. 采用指令滤波技术解决了backstepping方法的“微分爆炸”问题,且避免了有限时间控制设计中出现奇点.所设计的控制器能够使系统跟踪误差在有限时间内收敛至原点附近很小的邻域, 且对外部扰动具有抑制作用.仿真实验结果表明:该控制器具有有效性. 该文研究结果能为机械臂系统的抗干扰设计提供理论指导.
猜你喜欢
数学年刊A辑(中文版)(2023年4期)2024-01-04 05:47:40
哈尔滨商业大学学报(自然科学版)(2022年4期)2022-08-18 13:07:30
吉林大学学报(理学版)(2020年3期)2020-05-29 06:31:40
三峡大学学报(自然科学版)(2019年5期)2019-10-17 02:24:22
数学物理学报(2019年3期)2019-07-23 01:15:30
福建中学数学(2016年4期)2016-10-19 05:09:02
三峡大学学报(自然科学版)(2015年2期)2015-07-25 06:42:56
郑州大学学报(理学版)(2014年3期)2014-03-01 04:21:10
筑路机械与施工机械化(2014年4期)2014-03-01 02:59:05
自动化博览(2014年9期)2014-02-28 22:33:17