
一种基于茎叶类蔬菜的收获机柔性夹持输送装置
2022-03-12 02:20:36杨凯凯
农村科学实验 2022年2期
杨凯凯 胡 昀
(宁夏工商职业技术学院,宁夏 银川 750021)
1.引言
我国是一个名副其实的农业大国,拥有规模相当大的蔬菜种植面积,然而从当下我国蔬菜种植现状来看,主要还是依靠传统人工方式开展工作,配套机械自动化水平不高,尤其是针对收获环境的机械设备更是缺少。根据相关研究数据显示,在蔬菜整个种植过程中,收获环节的作业规模占据了总作业量的4成左右,并且当下该环节主要还是依靠人工劳作来完成,不仅需要消耗大量的人力,同时也难以有效提升蔬菜收获的效率,不利于保证蔬菜收获的及时性。在现代社会环境下,用人成本越来越高,这必然会影响到蔬菜种植户的经济收益,不利于提高自身的市场竞争力。所以,积极开展农业收获自动化机械的设计与开发工作,对于改善我国农业生产效率、提升种植户经济收入具有十分重要的作用。为了有效解决现阶段我国蔬菜种植中存在的问题,我国许多专家学者开展了大量研究工作,研究方式主要包含了两个方面,分别是从国外引进成熟的农业自动化机械,然后依照我国实际种植状况,对其进行相应的改造与优化,这种农业机械性能稳定、工作效率高,相比较于人工劳作,其工作效率能够提高5倍左右;其次是自主研究与开发相关农业机械配套设施,机型结构规模较小,灵活性高,也能够很好地满足农业收获需求,特别是大棚与温室作业环境中。然而,我国现代农业机械尽管能够实现输出的收获,但是还不具备有序放置的功能,依旧需要通过人工进行二次劳作,本文探究的茎叶类蔬菜收获机实现了蔬菜收获的有序排放,并配套了一个柔性夹持输送装置,能够降低对蔬菜的损坏,保证收获机的整体工作效果。
2.收获机总体结构与工作流程分析
依照实际设计要求,确定蔬菜收获机关键技术参数,具体如表1所示。收获机总体架构如图1所示,主要涵盖了行走装置、仿形轮、蜗轮蜗杆动力传动装置、水平传输机构、转向机构、电动提升机构、输送带张紧机构、扶禾机构、切割机构以及分禾器等。

表1 茎叶类蔬菜收获机关键技术参数

图1 茎叶类蔬菜收获机总体架构示意图
茎叶类蔬菜收获机在进行工作过程中,主要流程包含了以下几个部分:
2.1 分禾
分禾器将蔬菜植株扶植起来,由于该装置设计了的敞开角,所以能够将蔬菜植株拢入到各个分禾器内部。
2.2 夹持
将各个茎叶类蔬菜植株输送到夹持装置。
2.3 切割
割刀安装设定的速度做水平往复直线运动,将植株的根茎切割下来。
2.4 输送
收获机向前运动,提升机构将蔬菜植株运输到转向装置,与此同时在输送带上方设置有扶禾机构,防止出现长蔬菜植株倒塌在输送带上。
2.5 转向
蔬菜植株在运输到转向装置之后,在没有上方夹持力的作用下,再加上蔬菜植株底部受到转向机构的阻挡,会使其有序的转向到水平输送线上。
2.6 装载
蔬菜植株在水平输送带的作用下,会有序转移到储料口侧,之后进入到集装箱或者太空袋中,实现蔬菜植株的有序存储。
3.柔性夹持输送装置设计
在茎叶类蔬菜收获机总体结构中,夹持输送装置占据了极其重要的地位,该装置工作效果将直接影响到蔬菜收获品质,所以夹持力大小的选取十分重要。当夹持力不足时,极易导致蔬菜的掉落,当夹持力过大时,可能会对蔬菜茎部产生损坏,降低蔬菜经济价值。为了解决这样的问题,本文设计了一种柔性夹持输送装置,其结构示意图如图2所示。
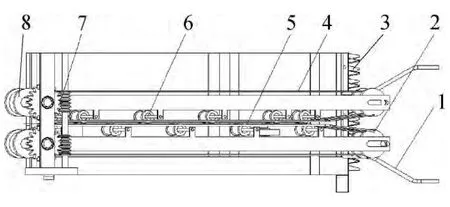
图2 茎叶类蔬菜柔性夹持输送装置结构示意图
柔性夹持输送装置涵盖了分禾器、主从动带轮、切割机构、夹持带、扶禾机构以及夹持轮等部分。由于蔬菜类茎秆的外径尺寸差别较大,所以在该机构中应用了双带式夹持方式,更好满足不同蔬菜茎秆对夹持形式与夹持力的要求。夹持输送装置以左右对称方式布置在前进方向机构的两侧,使得夹持输送线中心线和茎叶类蔬菜种植中心线保持一致。夹持轮也能够实现对输送带的张紧,设置在夹持带两边。柔性夹持输装置运行动力来自直流可调速电机,依托于涡轮蜗杆动力传输机构,驱动夹紧带往上进行提升运动。
3.1 输送带倾斜角度选取
柔性夹持输送装置在实际工作过程中,其运行面会与水平面保持一定的夹角,如图3所示,输送装置倾斜角的选取直接关系到茎叶类蔬菜收获效果。在本设计中,选取的输送带倾斜角为15°±5°,输送带初始位置和切割机构相连,最大程度确保夹紧带靠近蔬菜根部,夹持住蔬菜茎部。
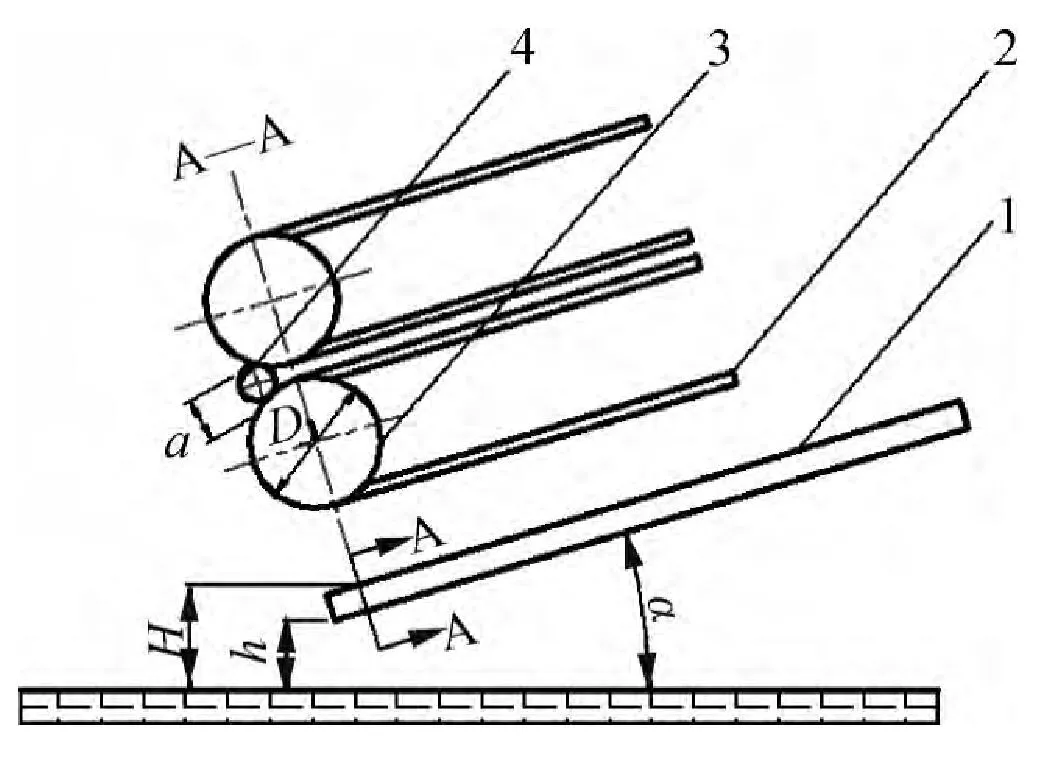
图3 茎叶类蔬菜收获机输送带工作方式图
正常情况下,柔性夹持装置夹持点距离地面高度H为:

上述公式中,h表示为割刀距离地面的垂直高度,D表示带轮外径,α表示为输送装置与水平面的夹角。
芦蒿根茎外径一般为15mm左右,留茬高度通常为30mm左右,设定输送带轮中心距离为1100mm,让茎叶类蔬菜在恒定倾斜角的背景下确保输送机构的有效提升高度,与相邻的水平输送机构相配合,实现蔬菜的有序、稳定输送。
3.2 夹持带夹持方式的选择
根据茎叶类蔬菜实际夹持需求,选取同步齿形带为夹持带,该类型带拥有瞬时传动比准确性高、传动效率好、速度稳定、噪声低、耐冲击性能优越、维护简便以及初始张紧力较低等优势,能够确保整个传输过程稳定、可靠,确保蔬菜植株能够有序进入到水平输送带,有效降低冲击载荷。
3.3 夹紧轮结构设计
夹紧轮外径大小会对输送效果产生非常大的影响,如果夹紧轮外径尺寸偏小,会导致相连夹紧轮之间的距离尺寸偏大,对蔬菜植株的夹持力会变小,极易导致输送过程中蔬菜植株出现掉落的情况;如果夹紧轮外径尺寸偏大,会造成相连夹紧轮之间的距离尺寸偏小,降低蔬菜植株的实时运输量,不利于提升收获机的整体工作效率。
同步动在长时间工作以后会出现塑性变形,产生松弛问题,对装置正常运行与夹持效果产生较大影响,所以应当要为夹持装置配置张紧装置,确保夹持牢固可靠。在本设计中,夹持轮也能够发挥张紧轮的作用,通过松开夹持轮安装螺栓,可以实现夹持轮安装位置的调整。依托于改变张紧轮轴心位置改变张紧力大小,确保夹持带始终保持张紧状态。通过这种设计方式,在保证装置稳定可靠运行的同时,也能够降低装置拆卸、维修的便捷性。
3.4 输送速度的选择
因为收获机正常行走速度在3~6km/h,所以提升输送装置的运行速度应当要高于行走速度,确保蔬菜植株能稳定夹持,有效防范较多蔬菜积压在提升机构中。当作业速度太高时,会同步带动蔬菜植株快速运行,从而难以有序进入到横向输送带上,同时还容易对蔬菜产生较大损伤。所以,在进行设计过程中,应当要确保能够调整速度,调整幅度控制在0.5~0.9m/s。水平输送速度应当要适当高于提升输送机构运行速度,避免大量蔬菜植株积压在输送带前端,但是如果运行速度过高时,会出现较多的空行程现象,浪费较多功率,同时也会导致蔬菜植株进入到集装箱中的速度过高,造成蔬菜的损坏,降低蔬菜的经济价值。为此,综合各方面因素,在本设计中确保水平输送带的速度略高于提升输送装置的工作速度,大约为0.1m/s。
4.结语
综上所述,柔性夹持输送装置是茎叶类收获机中十分重要的一个部位,在实际设计过程中,要特别注重夹持形式的选择、夹持力的选取等,这些都具有较大的难度。同时在实际应用过程中,还需要针对问题进行不断优化,进一步提高蔬菜收获机的工作效率与质量。
猜你喜欢
建筑与预算(2022年12期)2023-01-09 08:44:38
建筑与预算(2022年10期)2022-11-08 08:47:18
河北理科教学研究(2022年2期)2022-09-17 01:29:48
农业开发与装备(2021年2期)2021-12-27 05:59:49
四川农业与农机(2021年4期)2021-12-05 12:31:50
中国蔬菜(2019年1期)2019-01-21 12:34:32
橡塑技术与装备(2018年18期)2018-09-22 08:05:12
甘肃农业科技(2018年1期)2018-02-02 06:08:54
设备管理与维修(2016年5期)2016-03-16 02:20:53
橡胶工业(2015年10期)2015-08-01 09:06:02
