
机械手的硬件控制系统电路设计
2022-03-10 01:43邱红伟
中文信息 2022年1期
邱红伟
(广西壮族自治区特种设备检验研究院,广西 南宁 530200)
机械手,指能模仿人手和臂的某些动作功能,用以按固定程序抓取、搬运物件或操作工具的自动操作装置。其主要由执行机构、驱动机构和控制系统三大部分组成。它可代替人进行繁重劳动以实现生产的机械化和自动化,广泛应用于机械制造、轻工和原子能等部门。机械手是在机械化,自动化生产过程中发展出来的一种新型装置[1]。在现代生产过程中,机械手被广泛运用于自动生产线中。它能自动化定位控制并可重新编程序,有多个自由度,可用来搬运物体,在不同环境中作业。
一、机械手核心控制器设计
机械手核心控制器内部包括输入输出设备、程序存储器、数据存储器及中央处理器。对于需要灵活机动,精度要求不高,有可扩展性及程序可擦写和简单成熟的编程平台等要求,单片机恰恰是最合适的选择。
机械手驱动中电机调速一般都采用PWM方式,并且从传感器得到的信号需要经过A/D转换才能送给单片机处理。控制器ATMEGA8单片机具有丰富的资源,指令周期短,工作速度快,低功耗,具有8K闪存,相当于两片89C51,且体积小巧。ATMEGA8 最大的优点是芯片内部集成了三路PWM输出和6路10位A/D转换器[2]。由于自身已经集成了这两大功能,选用ATMEGA8可使整个电路设计简单。由于ATMEGA8为28脚,比89C51体积更小,程序存储器又比89C51大一倍,故选用ATMEGA8单片机作为控制核心。
选用的ATMEGA8单片机是PDIP封装,其中有23个输入输出接口,有28脚。B口、D口为8位双向I/O口,C口只有7位。这23个口均具有可编程的内部上拉电阻,其输出缓冲器均具有对称的驱动特性,可以输出和吸收大电流。但作为输入使用时,如果内部上拉电阻使能,端口被外部电路拉低时将输出电流。在复位过程中,即使系统时钟还未起振,端口B、C、D将处于高阻状态。
主控电路的设计核心是ATMEGA8单片机,外接机械手驱动模块和反馈信号模块、电源等硬件电路。单片机ATMEGA8采用+5V的直流电源供电,工作在8MHZ的频率下。根据ATMEGA8各引脚功能,三个口B口、C口和D口,各口功能分配如下:B口输出PWM和接晶振电路;C0—C1为AD转换接口,处理反馈信号的模拟电压;D口产生电机驱动信号及进行串口通信(见图1)。
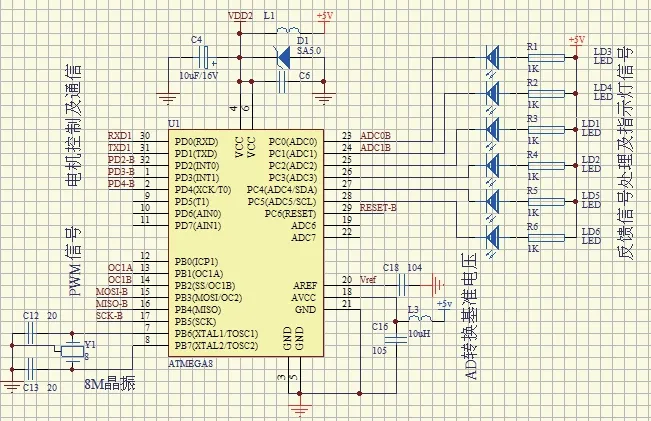
图1 机械手核心控制电路图
二、机械手通信模块设计
机械手主通信模块主要是与各单片机主控制模块进行通信,协调各单片机之间的工作和发送各种命令,同时也通过USB转串口模块与PC机通信,接收或发送命令和数据,主通信模块之间进行多机通信从而控制电机,并通过反馈信号采集模块采集机械手的位置信息从而实现机械手的定位。ATMEGA128是ATMEL公司的8位系列单片机的最高配置的一款单片机,是低功耗、高性能的AVR 8位微处理器,具有53个可编程I/O 口线、两个可编程的串行USART,128K字节的系统内可编程Flash,4K字节的EEPROM,4K字节的内部SRAM[3]。ATMEGA128的强大功能使得相对于使用其他单片机而言,减少了很多的外围元件,系统的可靠性得到了增加,成本也相对较低,因此,机械手主通信模块采用ATMEGA128为控制核心(见图2)。
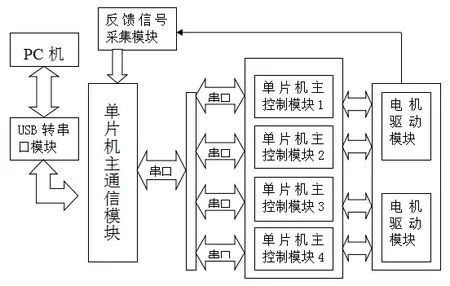
图2 机械手的通信模块
三、机械手驱动模块设计
1.直流电机驱动电路设计
在机械手设计中选用了L298电机驱动专用芯片。驱动芯片L298是非常好的小型直流电机驱动芯片之一。它可以用来专门驱动两个直流电机。在6—46V的电压下,可以提供2A的额定电流。L298过热后会自动关断,并且有电流检测反馈功能[4]。为了保证L298正常工作,需要安装片外续流二极管。
L298芯片内部集成了两个H桥功放电路,可以直接驱动两个直流电机。A、B、C、D分别对应A桥的四个晶体管,使能端EN A接高电平,SENSE A接地。IN1输入高电平时,A管导通,C管不通,IN2输入低电平,D管导通,B管不通,即A,D管通,电机顺时针转;反之,IN1输入低电平时,A管不通,C管导通,IN2输入高电平,B管导通,D管不通,即B,C管通,电机逆时针转。
采用反相器7406增加单片机的带载能力,同时也起到单片机与L298的隔离作用;因为电机采用的是12V电源,而单片机和L298用5V的电源,电容起到对电源的滤波作用,可以减少电机对单片机或其他电路的干扰作用[5-6]。在电机驱动中,采用单极性PWM方式。两路PWM由ATMEGA8的PD端口采用定时器的功能产生,通过7406把脉冲送入L298的ENA和ENB端。而电机的正反转可通过L298的INPUT端口来控制。经上述分析可设计出L298驱动电机的原理图(见图3)。

图3 L298驱动电机原理图
2.末端执行器舵机驱动设计
在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统[7]。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压相比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
舵机的控制信号是PWM信号,利用占空比的变化改变舵机的位置。因此,可以利用ATMEGA8的OC1A、OC1B来产生相应的PWM控制信号。
四、反馈信号采集模块设计
机械手的反馈信号主要是位置信号,因为反馈信号主要是通过连接在机械手各转动轴上的多圈电位器来产生的,因各旋转轴转动的角度较小,所以通过电位器产生的反馈信号比较小。可以通过电桥电路的和差特性对电位器产生的信号进行采集并放大后送到单片机进行AD转换后获得机械手的位置信息。
一般地,被测量是非常微弱的,必须用专门的电路来测量这种微弱的变化,最常用的电路就是各种电桥电路,主要有直流和交流电桥电路。本设计采用的是直流电桥,采用直流电源供电的桥式电路,把电阻片的电阻变化率ΔR/R转换成电压输出,然后提供给放大电路放大后进行测量。利用直流电桥对反馈信号进行采集放大后,利用ATMEGA8单片机自带的10位AD转换功能进行AD转换,得出机械手的位置信息,用LM358进行差分放大,可有效地抑制干扰信号对反馈信号的影响和单片机对机械手的位置判断。
直流电桥是指采用直流电源供电的桥式电路。电桥电路的作用是把电阻片的电阻变化率ΔR/R转换成电压输出,然后提供给放大电路放大后进行测量。由此可以利用直流电桥对反馈信号进行采集放大后,利用ATMEGA8单片机自带的10位AD转换功能进行AD转换,得出机械手的位置信息,如图4所示为反馈信号采集模块,图中用LM358进行差分放大,可有效地抑制干扰信号对反馈信号的影响和单片机对机械手的位置判断。

图4 反馈信号采集模块
结语
在现今的生活上,科技日新月益的进展之下,机械人手臂与有人类的手臂最大区别就在于灵活度与耐力度。机械手臂的应用也将会越来越广泛,机械手是近几十年发展起来的一种高科技自动生产设备,作业的准确性和环境中完成作业的能力。机械手所有硬件电路从总体上可分为四个模块:单片机主通信模块、单片机主控模块、电机驱动模块、反馈信号采集模块。以ATMEGA128为核心,控制各单片机和PC机之间进行通信,指挥机械手完成各种动作。而以ATMEGA8为控制运动电路核心,利用ATMEGA8单片机的强大功能来完成较复杂的各种控制运动,在单片机中主要是用了ATMEGA8通过软件设置的PWM输出和A/D转换功能,使整个电路设计变得简单。机械手电机驱动模块采用了电机专用驱动芯片L298驱动两个直流电机,L298内部自身已集成了两个PWM功放电路。通过改变PWM的占空比调节电枢两端电压,实现机器人平滑调速。为了使得机械手的定位更准确、更快速,因此,就采用了闭环控制,其反馈信号由反馈信号采集模块来实现。
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
自动化学报(2019年6期)2019-07-23
电子制作(2019年9期)2019-05-30
电子制作(2018年1期)2018-04-04
制造业自动化(2017年2期)2017-03-20
通信电源技术(2016年1期)2016-04-16
机电信息(2015年3期)2015-02-27
舰船科学技术(2015年8期)2015-02-27
电子设计工程(2015年15期)2015-02-27
