
自适应频谱塑形主动控制及舰艇领域应用研究进展
2022-03-09 13:48张兴武刘金鑫陈雪峰严如强
中国机械工程 2022年4期
陈 甜 张兴武 刘金鑫 陈雪峰 严如强
1.西安交通大学高端制造装备协同创新中心,西安,7100492.西安交通大学机械制造系统工程国家重点实验室,西安,710054
0 引言
舰艇是国防的重要武器装备,它的隐身性能是其生存能力和军事打击能力的重要保障,具有隐蔽自己和先敌发现的双重战术意义[1]。美国海军在《Technology for the United States Navy and Marine Corps,2000-2035:Becoming a 21st-century Force》报告中提出了舰艇需要发展和创新的六项关键技术,其中隐身技术为六项技术之首[2]。据测算,舰艇的水下噪声每降低20 dB,可使己方被动声呐探测距离增加一倍,敌方被动声呐探测距离减小50%,并能缩小敌方水中兵器的作战半径,降低其命中率,同时可使自身的声模拟干扰装置作战效果提高15倍左右[3]。如果声呐平台自噪声降低5 dB,我方水下舰艇声呐探测距离可增加60%。如果水下辐射噪声降低10 dB,则敌方探测我方被动声呐作用距离减小至原来的32%[4]。此外,舰艇的水下噪声还是导致敌方水中兵器跟踪、起爆的信号源。各种声自导武器(自导鱼雷、声水雷等)主要感应舰艇发出的噪声,被攻击的舰艇噪声越大,敌方的声自导作用距离越远,命中率越高[5]。因此,发展和应用舰艇的声隐身技术是提高其生存力和军事打击能力的重要手段。
国内外舰艇声隐身技术主要集中在结构改造、被动减振降噪、主动减振降噪方面。结构改造限制大、灵活性差、换代成本高。经过多年发展被动减振降噪技术已逐渐成熟,典型代表有浮筏隔振、消声瓦等[6-10],但被动降噪技术是以增加艇体附加舱室和质量为代价的,并且对低频振动的控制效果差。主动控制是通过外加额外激励的方式进行减振降噪,它具有灵活性高、低频控制效果好等优点,而舰艇的低频线谱噪声由于具有衰减慢、传播远、特征显著等特点,被视为其声隐身性的最大威胁。因此,开展舰艇的振动与噪声主动控制理论及技术研究意义重大。
目前,主动控制主要从主动消振、隔振和吸声等角度来提高水下舰艇声隐身性能,但这些方法在达到一定效果后就很难继续提高减振能力,特别是随着现代声呐技术和现代信号处理技术的发展,从微弱噪声中提取特征的能力已经越来越强。笔者希望从声学误导角度入手,研究具有辐射噪声特性可变的主动控制技术。这种噪声辐射可变的技术可以对被动声呐造成信息误导,实现舰艇另一个层面的“隐身”目的。频谱塑形主动控制为这种声隐身方式提供了解决思路。频谱塑形主动控制技术是主动控制领域继振动与噪声治理(消减和消除)和振动与噪声利用(产生和增强)之后的新技术分支,它是指利用主动控制的方法有目的地改变强干扰环境下的结构响应频谱,使控制后的结构响应频谱和目标频谱一致。因此,研究频谱塑形主动控制对试图通过改变辐射噪声特征以实现舰艇声隐身的思路来说具有重大的研究意义。
本文首先阐述了频谱塑形主动控制的目的和内涵;然后根据自适应频谱塑形主动控制理论的发展,依次从自适应逆控制、自适应主动控制以及自适应频谱塑形主动控制三个方面进行文献梳理;最后举例阐述了自适应频谱塑形主动控制技术在舰艇领域的应用,以体现自适应主动控制算法的有效性。
1 频谱塑形主动控制的目的与内涵
主动控制理论和技术是振动科学和振动工程的重要内容。无论是振动与噪声的治理还是利用,都离不开主动控制。通常认为主动控制对振动和噪声的消减或消除即是治理,主动控制对振动和噪声的产生或增强即是利用。随着主动控制技术的发展,出现了另一种新的控制形式:它的控制目标既不是单一的消减或消除,也不是单一的产生或增强,而是在某种意义上两者的结合,它希望结构的振动或噪声按照某种预定的模式进行,这种控制形式称为频谱塑形(spectral reshaping)主动控制。
频谱塑形主动控制可以这样定义:频谱塑形主动控制是指通过主动控制的方法有目的地改变强干扰环境下的结构响应频谱,使得控制后的结构响应频谱和目标频谱一致。频谱塑形主动控制系统在时域上表现为含有强干扰的跟随系统。频谱塑形主动控制的目标和内涵如图1所示。频谱塑形主动控制通过主动控制方法消减/消除、增强/保持以及注入指定频率,使得结构响应频谱和目标频谱相一致。频谱塑形主动控制最早来源于噪声均衡[11],它目前主要的应用领域为声品质控制、心理声学、电动汽车、医学穿戴设备等[12-15]。此外,在军事领域,为了实现伪装和声隐身,也可以对舰艇的振动与噪声进行频谱塑形主动控制。

图1 频谱塑形主动控制的目标与内涵Fig.1 Objective and connotation of active spectrum reshaping control
2 自适应频谱塑形主动控制研究进展
自适应频谱塑形主动控制是一个新兴的振动与噪声控制分支,其理论起源于自适应逆控制理论、发展与自适应主动控制理论,目前在自适应主动控制中形成了继振动与噪声治理(消减和消除)和振动与噪声利用(产生和增强)之后的新技术分支。自适应逆控制、自适应主动控制以及自适应频谱塑形主动控制三者的关系如图2所示。自适应理论是自适应频谱塑形主动控制的理论基础,自适应理论大致上可以分为自适应滤波、自适应预测及自适应控制。自适应滤波和自适应控制分别在信号处理领域和控制领域独立发展,自适应逆控制的出现为两者搭建了桥梁。自适应主动控制是从自适应逆控制发展起来的振动与噪声控制理论,它在原理上和自适应逆控制等效,却在物理实现上有所区别。
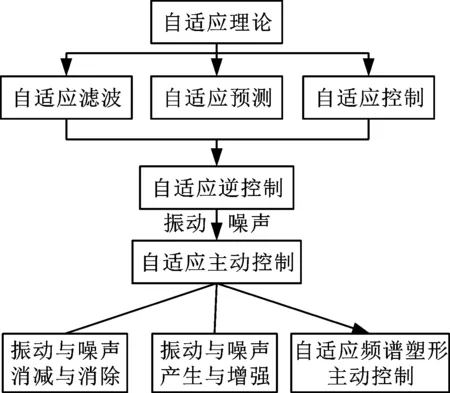
图2 自适应逆控制、自适应主动控制以及自适应频谱塑形主动控制三者的关系Fig.2 The relationships of adaptive inverse control,adaptive active control and adaptive spectral reshaping active control
2.1 自适应逆控制
自适应逆控制是20世纪80年代发展起来的控制理论,它是一种从自适应信号处理的角度去研究自适应控制问题的理论。自适应逆控制是通过建立一个被控对象的逆模型,使得自身的传递函数和被控对象的传递函数的乘积为单位1,这样的响应即可跟随参考信号,从而建立一个跟随系统。自适应逆控制的基本结构如图3所示。

图3 自适应逆控制的基本结构Fig.3 The basic structure of adaptive inverse control
自适应逆控制的思想最早出现在斯坦福大学Widrow[16]于1971年发表的一篇关于血压调节的文章中。之后,1982年Widrow的学生Schaffer完成了模型参考自适应逆控制的博士论文,模型参考自适应逆控制是要求系统跟随经过延迟或平滑的指令输入的一类自适应逆控制系统,其控制结构如图4所示。1983年,在旧金山第一届IFAC控制及信号处理研讨会上,WIDROW等[17]正式发表了关于自适应逆控制的第一篇文章。1985年,BERNARD等[18]的专著《自适应信号处理》也包含了自适应逆控制的内容,但真正关于“自适应逆控制”的专著于1996年出版[19]。在这20年间,Widrow教授团队对模型参考自适应逆、扰动消除、自适应逆的变结构等进行了充分的研究,20世纪90年代中后期,该团队的研究主要集中于非线性自适应逆控制[20-22]。2000年后,美国科罗拉多大学 PLETT[23-25]继承和发展了该领域的研究,其研究主要集中于自适应逆控制和非线性问题以及智能算法的结合。

图4 模型参考自适应逆控制Fig.4 Model reference adaptive inverse control
近年来,关于自适应逆控制的研究也主要考虑系统的非线性和不确定性。ZHANG等[26]针对一类离散时滞非线性系统,提出了一种自适应隐式逆控制方法,采用P-I模型对压电作动器中的滞回环进行了表征,构造了滞回隐式逆补偿器来克服滞回。LIU等[27]针对磁滞效应提出了非线性的鲁棒自适应逆控制方法,以逆迟滞作为补偿器,推导了逆补偿的误差表达式,进行了严格的稳定性证明。CAI等[28]研究了包含未知反向间隙和未知故障的迟滞作动器的自适应逆控制方法,该方法采用backstepping技术,保证了迟滞作动器在任何失效模式下都闭环有界,同时还保证了较好的跟踪性能。DENG等[29]针对锻造机械臂中存在特征未知死区的问题,提出了一种基于Takagi-Sugeno(T-S)模糊模型的自适应逆死区控制方法,实现了对未知特征死区的动态补偿,并在实际锻压机械臂上验证了有效性和适用性。ZHANG等[30]研究了多输入多输出(multiple input multiple output,MIMO)强耦合非线性履带机电系统的自适应逆控制方法,提出了基于Kriging算法和Lyapunov理论的自适应逆控制方法,该自适应逆控制方法具有较好的控制精度和鲁棒性。HE等[31]研究了具有输入侧隙和系统不确定性的船舶-立管耦合系统的自适应逆控制方法,利用Lyapunov判据分析并证明了被控系统的有界稳定性。
部分研究也集中于自适应逆控制与各类智能算法的结合。AFTAB等[32-33]研究了一种基于Lyapunov函数的神经逆控制体系结构,用于具有库仑摩擦和死区非线性的单励磁直流电动机的高效、平稳的速度控制,该算法不仅在抗负荷扰动和非线性处理方面优于传统的梯度下降神经控制器,而且保证了整个闭环系统的稳定性,此后他们提出了基于Lyapunov函数的无梯度神经逆控制方法。SHI等[34]提出了基于模糊C回归模型和反向传播(back propagation,BP)算法的自适应逆控制器,首先采用模糊C回归模型聚类算法建立模糊逆模型,然后采用BP算法对T-S模糊模型的前提参数和结果参数进行调整,仿真结果表明,所提出的自适应逆控制器控制的系统输出与期望输出之间的误差较小,且当系统输出存在扰动时,系统仍能保持稳定。CAO等[35]提出了一种新的自适应逆多层T-S模糊控制器,采用差分进化算法对多阶T-S模糊模型的参数进行最优辨识,基于Lyapunov稳定性原理,保证了逆模型控制器的闭环稳定运行,可用于一类应用于不确定非线性单输入单输出系统的鲁棒控制。此外,越来越多的领域开始应用自适应逆控制,包括航空发动机转速控制[36]、四缸系统的液位控制[37]、开关磁阻电机的位置控制[38]、永磁同步电机调速系统[39-40]等。自适应逆控制在主动控制领域也有大量应用。
2.2 自适应主动控制
自适应主动控制是在自适应逆控制理论基础上发展起来的振动与噪声控制理论,其控制原理如图5所示。如前文所述,传统的主动控制根据目标的不同可以分为振动与噪声治理(消减与消除)和振动与噪声利用(产生与增强)两个重要分支。而自适应逆控制作为一个跟随系统,最早也在这两个方向发展和应用,前者起源于管内消声,后者起源于扬声器的波形再现。

图5 自适应主动控制Fig.5 Adaptive active control
用于自适应振动和噪声消减与消除的自适应主动控制理论主要源自20世纪70年代中期斯坦福大学Widrow教授等提出的自适应滤波器理论。20世纪80年代初,贝尔实验室的MORGAN[41]和BURGESS[42]、斯坦福大学的WIDROW等[43]分别独立将最小均方(least mean square,LMS)算法引入主动噪声控制,提出著名的滤波前馈自适应算法(filtered-x least mean square,FXLMS),即增加了一个次级通道模型对参考信号进行滤波。LUO等[44]提出了一种小波包FXLMS算法,将宽带噪声分解为几个可预测且独立控制的限带部分,能够实现对混沌噪声和随机噪声等宽带噪声的抑制。最早提出的FXLMS算法是针对宽带信号的,但宽带前馈信号假设次级源对参考信号无影响,而这种假设大多数情况下并不成立,所以基于冲击无限长(infinite impulse response,IIR)滤波器的算法被提出[45]。之后针对该假设不成立的情况,有学者针对次级通道非线性的存在会使FXLMS算法性能下降的问题进行了研究。AHMED等[46]提出了一种新的目标函数来提高在次级通道存在饱和非线性时基于FXLMS算法的前馈主动控制系统的降噪性能。ROUT等[47]提出了一种基于粒子群优化的非线性主动噪声控制算法(particle swarm optimization based nonlinear structure,PSO-NLS),其中PSO用于基于滤波器组的函数链接型人工神经网络(functional link artificial neural network,FLANN)结构的参数调整,不需要估计次级通道,由此在次级通道饱和非线性条件下,基于PSO-NLS的主动噪声控制(active noise control,ANC)算法性能优于FXLMS。另外,对于窄带噪声的消减方法,Widrow很早就有研究[48],之后MORGAN等[49-50]将其与FXLMS自适应算法相结合并应用于自适应主动控制领域。BAGHA等[51]针对窄带主动噪声控制系统,提出了滤波X加权频率傅里叶线性组合器最小均方算法(filtered-x weighted-frequency Fourier linear combiner least mean square,FX-WFLC-LMS),他们还提出了一种计算效率更高的滤波误差加权频率傅里叶线性组合最小均方算法(filtered-error weighted-frequency Fourier linear combiner least mean square,FE-WFLC-LMS),这两种算法均能校正任意数量的频率失配,两种算法原理如图6所示。

(a)FX-WFLC-LMS

(b)FE-WFLC-LMS图6 有效适应频率不匹配的窄带主动噪声控制系统[51] Fig.6 Efficient narrowband active noise control systems for accommodating frequency mismatch
从控制结构特点的角度,最早提出的FXLMS算法属于前馈自适应控制,LIU等[52]设计并开发了基于FXLMS的多通道前馈主动噪声控制系统,以降低重症监护病房患者床边的干扰噪声。但在某些场合,前馈参考信号无法被准确获取,所以反馈自适应主动控制算法也被提出了[53],它通过从误差信号中减去次级振源的分量来估计参考信号,以获得类似前馈控制结构,故反馈自适应主动控制方法也称为自适应预测器[54]。反馈控制方法的最大缺陷是无法应对宽频噪声,针对此问题,LUO等[44]提出了一种新的反馈ANC算法——小波包FXLMS算法,能够实现对混沌噪声和随机噪声等宽带噪声的抑制。此外,为实现非线性主动噪声控制,TAN等[55]研究了自适应双线性滤波器,提出了简化对角结构双线性FXLMS(simplified diagonal-structure bilinear filtered-X least mean square,SDBFXLMS)和信道减少对角结构双线性FXLMS(channel-reduced diagonal-structure bilinear filtered-X least mean square,CRDBFXLMS)算法,其中CRDBEXLMS算法具有更好的控制性能和更低的计算复杂度。另外,针对基于归一化FXLMS算法(normalized LMS with a filtered-x structure,FXNLMS)收敛速度慢的问题,LORENTE等[56]提出了一种带有正交校正因子的改进的归一化FXLMS(modified filtered-x NLMS with orthogonal correction factors,M-OCF)的多通道主动噪声控制系统,可以大大提高收敛速度,又针对该算法增加了计算复杂度的问题,将M-OCF算法推导为基于频域分块的算法(M-OCF based frequency partitioned block,FPM-OCF),并利用图形处理单元(graphics processing units,GPUs)实现实时处理,与其他类型算法相比,FPM-OCF算法的收敛速度有所提高。
用于振动与噪声的产生与增强的自适应主动控制理论主要在两个领域有广泛的应用,其一是高保真声场再现,其二是力学环境振动试验的振动再现。自适应逆控制在高保真声场再现中的研究起源较早,最早的正式论文是英国南安普顿大学Nelson教授团队[57-59]的关于声场再现的逆滤波器设计。TATEKURA等[60]研究了通过噪声环境下的半盲源分离技术进行参考信号识别的半自适应声场重现系统,仿真结果表明该方法可以获得高精度的参考信号。CANCLINI等[61]研究了室内声场再现的鲁棒几何方法,通过扬声器矩阵降低室内声场复现的反射,由于该问题的矩阵是病态的,故通过奇异值分解获取对象的伪逆,最后通过试验验证了该方法的有效性。TALAGALA等[62]研究了通过混响声场的模态分解进行声场再现的多通道自适应补偿,混响通道的估计和补偿都在完全解耦的模态空间中进行,降低了计算复杂度。JIN等[63]研究了基于稀疏理论的多区域声场再现方法,假设声场在平面波分解域里面是稀疏的,利用稀疏的方法进行声传递函数辨识,结果表明该方法仅需要很少的麦克风即可准确地进行宽频声场复现。
自适应逆控制在力学环境试验的应用最早出现于2000年,英国赫瑞瓦特大学KARSHENAS等[64]首次采用自适应逆控制算法控制电动振动台,实现冲击响应的波形再现。DERTIMANIS等[65]研究了基于加速度信号的电动式振动台的自适应逆控制,通过MFXLMS算法获得了优良的性能,可以消除振动台的动态特性,并且具有抵抗样品动态特性的鲁棒性,试验证明了该方法的有效性。ZHANG等[66]研究了双振动台的姿态同步跟踪控制方案,提出了一种混合模糊PD交叉耦合控制器(cross-coupled controller,CCC)和自适应逆控制器(adaptive inverse controller,AIC)的混合控制器,试验表明该混合控制方案的同步跟踪性能优于传统控制器。YACHUN等[67]提出了一种结合模型参考自适应控制(model reference adaptive control,MRAC)和三变量控制(three-variable control,TVC)的振动台试验双环控制方法,仿真表明该双环控制方法在时域和频域上都具有较好的控制性能。LIU等[68]设计了一种能够扩展电液振动台系统频率带宽的全状态反馈前馈伺服控制器,还提出了一种频域自适应功率级控制算法,所提算法大大提高了系统的有效带宽,控制系统响应的功率级最终能与目标功率谱匹配,精度在±3 dB以内。
2.3 自适应频谱塑形主动控制
自适应频谱塑形主动控制理论是自适应主动控制理论中发展起来的新分支,它是指通过主动控制的方法有目的地改变强干扰环境下的结构响应频谱,使得控制后的结构响应频谱和目标频谱一致。自适应频谱塑形主动控制为图5的系统添加了一个误差参考,如图7所示,让误差参考信号和误差信号形成的伪误差信号反馈到自适应算法中去。该系统的目标是使误差信号跟踪误差参考信号,以实现主动控制中的跟随系统,可以通过设计误差参考信号的频谱来实现误差信号的频谱塑形。

图7 自适应频谱塑形主动控制的一般结构Fig.7 The general structure of adaptive spectral reshaping active control
自适应频谱塑形主动控制最早由美国北伊利诺伊大学KUO等[11]于1994年提出,他们将FXLMS算法中的误差信号进行滤波,提出了自适应滤波误差控制(filtered-error least mean square,FELMS)算法,该算法可以通过误差信号滤波器对残余噪声进行整形。很快他们又将该算法拓展到窄带前馈自适应控制中,提出了主动噪声均衡器(active noise equalizer,ANE)算法[69]。
目前经典的自适应频谱塑形主动控制算法有两种,一种是针对宽带噪声的自适应滤波误差控制算法(FELMS),其控制结构如图8 所示;另一种是针对线谱信号的自适应主动噪声均衡算法(ANE),其控制结构如图9 所示。两种算法的基本思想都是通过某种方式获得伪误差信号并将其作为自适应算法的目标函数,当伪误差信号的目标函数最小化时,则实际误差信号趋近于误差参考值。关于这两种控制算法有许多的研究和应用。
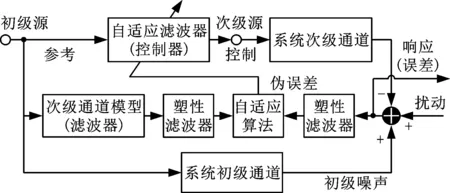
图8 自适应滤波误差算法Fig.8 Adaptive filtering-error algorithm
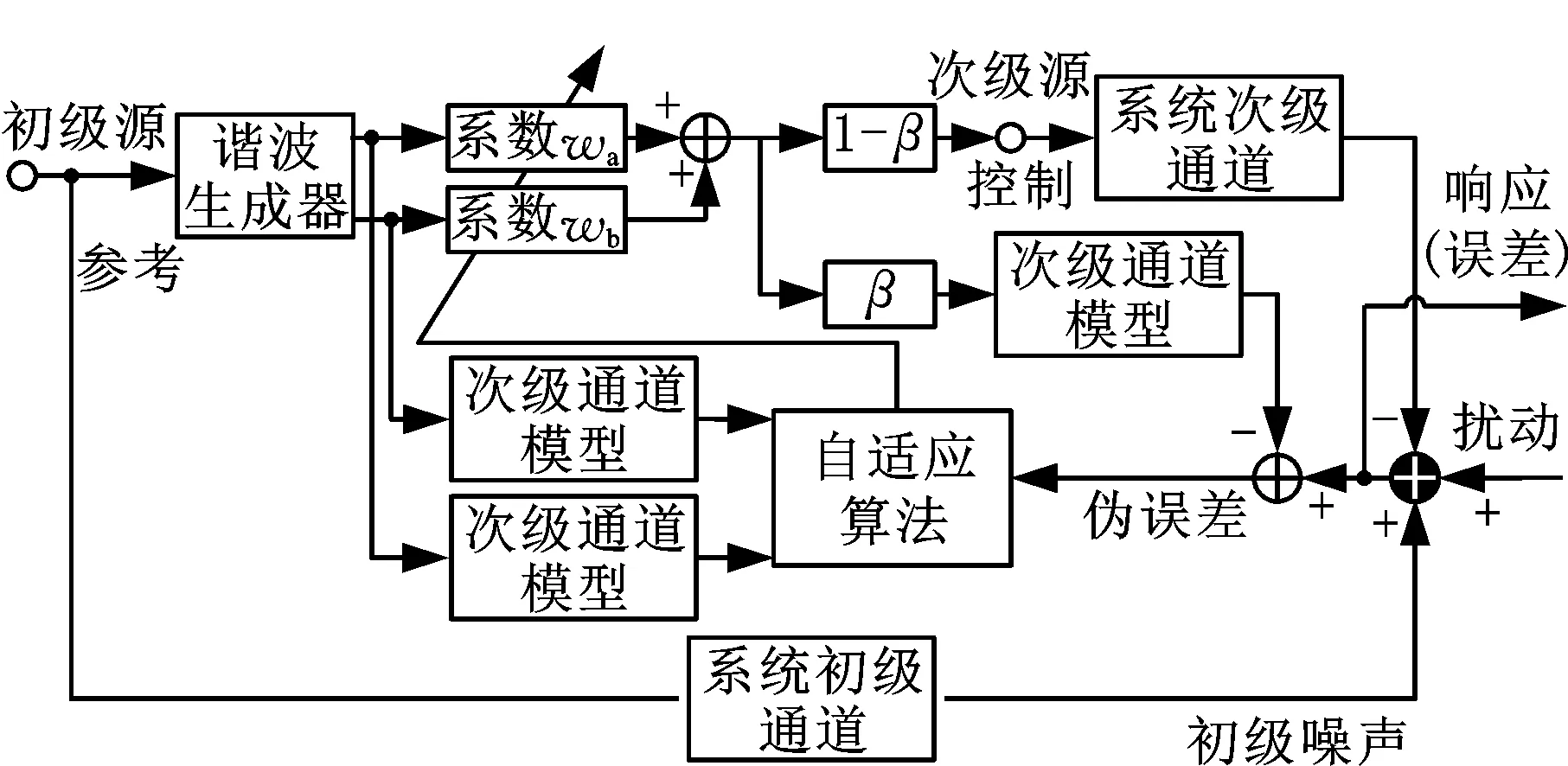
图9 自适应主动噪声均衡算法Fig.9 Adaptive active noise equalization algorithm
关于FELMS的研究和应用常常聚焦于降低计算复杂度的问题,ZHAO等[70]在非线性主动噪声控制系统自适应递归二阶Volterra滤波器中引入FELMS算法,该滤波器解决了实际应用时非线性主动噪声控制系统(nonlinear active noise control,NANC)中出现的信号饱和以及其他非线性失真问题,使用FELMS算法大大降低了计算复杂度。LUO等[71]提出了用于非线性主动噪声控制的改进功能链人工神经网络滤波器,在所提的滤波器中使用FELMS算法以降低计算复杂度。ZHU等[72]提出了一种基于FELMS的窄带主动噪声控制(FE-NANC)系统,试验表明FE-NANC大大降低了多频NANC系统的计算成本。BAGHA等[51]针对窄带主动噪声控制系统,提出了滤波X加权频率傅里叶线性组合器最小均方算法(FX-WFLC-LMS),为了减小其计算量,还提出了一种计算效率高的滤波误差加权频率傅里叶线性组合最小均方算法(FE-WFLC-LMS),两种算法均能校正任意数量的频率失配。另外,SHAH等[73]提出了一种利用分数阶导数的归一化FELMS(fractional normalized FELMS,FN-FELMS)算法,用来解决主动噪声控制系统中的次级通道建模问题,在给定的信噪比的仿真试验中,该方法在收敛性、模型精度和稳态性能方面都优于传统的FELMS方法。
ANE算法是一种针对线谱信号的自适应频谱塑形主动控制方法。ANE算法的基本思想是让误差参考信号和误差信号形成的伪误差信号反馈到自适应算法中,当自适应算法收敛时,将伪误差信号调整为最小,则实际误差信号可以通过增益系数β对初级噪声进行塑形。通过指定不同的增益系数,相应的初级噪声的频率分量可以被消除(β=0)、消减(0<β<1)、保持(β=1)或增强(β>1)。关于ANE算法的研究较为丰富,如DIEGO等[74-75]进行了可多通道的主动噪声均衡器的理论和试验研究,提出了一种具有更低计算量和更小超调的common-error ANE算法。KUO等[12,14,76]将ANE算法引入主动声品质控制领域,并进行了频域算法的拓展研究。REES等[77]指出了ANE算法对次级通道模型误差敏感的问题,并提出了一种调相指令滤波LMS算法(phase scheduled command FXLMS),该方法在面对次级通道误差时具有更小的控制力和更好的稳定性。WANG等[78-79]对主动噪声均衡器的次级通道误差引起的均衡失配和收敛性的问题进行了分析,得出了次级通道辨识误差影响ANE算法控制精度和收敛速度的结论。此外,LIU等[80-82]对ANE算法进行了一系列的研究和改进,他们首先针对ANE算法的均衡失配的问题,提出了一种增强ANE(enhanced ANE,EANE)算法(图10),该算法可以在线调整增益参数,使得次级通道辨识存在误差的情况下,残余噪声幅值的控制精度大大提高;之后他们还针对ANE算法只控制(缩放)残余噪声的幅度而不考虑相位控制的问题,提出了一种基于参考振幅归一化和结构修正的改进主动噪声均衡器(modified ANE,MANE)算法,并在此基础上推导了一种更通用和有效的算法(图11),称为幅相控制(amplitude and phase control,APC)算法,该算法还能够实现注入不包括在主噪声中的频率成分,能够实现任意频率成分的消除、消减、保持、增强、注射五种控制模式,试验验证了所提算法的有效性和优越性,这是一种更完善的频谱塑形主动控制解决方案。

图10 多频增强ANE(EANE)算法[80]Fig.10 Multi-frequency enhanced ANE(EANE) algorithm
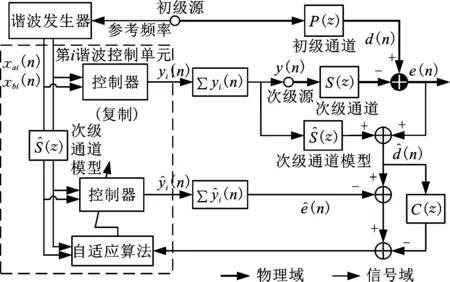
图11 改进ANE(MANE)频谱塑形算法[81]Fig.11 Modified ANE(MANE)spectrum reshaping algorithm
ANE的应用研究主要集中在车内声品质主动控制(active sound quality control,ASQC)领域,de OLIVEIRA等[12]提出了归一化的ANE算法,通过次级通道的幅频特性对参考信号整形,使得不同频率成分具有相同的收敛速度,采用真实的稳态和瞬态的发动机信号来评估控制性能。窦雪婷等[83]提出了一种基于经验模态分解(empirical mode decomposition,EMD)和ANE算法的车内声品质EMD-ANE主动控制算法,与传统ANE算法相比,该算法可以更好地控制车内噪声的响度水平,更适用于ASQC。WANG等[84]提出了一种基于平稳离散小波变换(stationary discrete wavelet transform,SDWT)的混合时频域主动噪声均衡(time-frequency domain ANE,TFD-ANE)算法,并且使用基本ANE、变步长FXLMS的ANE、归一化频域块FXLMS的ANE和TFD-ANE算法进行了ASQC仿真,结果表明,TFD-ANE不仅有效地抑制了车内噪声的锐度,而且提高了响度和粗糙度的ASQC效果。LIU等[85]提出了一种基于传统ANE的宽带ASQC算法,在传统ANE算法中引入非线性自适应增益因子,该增益因子根据瞬时扰动噪声的功率和预先设定的声压级目标自适应调整,该算法在干扰噪声变化或控制目标变化时具有良好的跟踪能力,仿真结果表明,该算法能够将残余声压级控制到预定目标范围,绝大多数情况下声压级误差在±2 dB以内。
由以上对自适应频谱塑形主动控制研究现状的综述和概括可以发现,自适应逆控制和自适应主动控制方法在各个领域都应用广泛,并且许多研究表明其对低频噪声,无论是宽带噪声还是窄带噪声都有很好的控制效果,所以针对危害舰艇声隐身性的低频线谱噪声的控制具有可行性。但主动控制主要是对振动与噪声进行单一的消减/消除或产生/增强,当达到一定的控制效果之后就很难再继续提升,无法使舰艇具有更好的声隐身性,因此,考虑使用消减/消除和产生/增强相结合的自适应频谱塑形主动控制方法来接近目标频谱,以实现舰艇更好的声隐身效果。
3 频谱塑形主动控制在舰艇领域应用
3.1 舱段柱壳模型的自适应频谱塑形主动控制
针对舱段柱壳结构,刘金鑫等[82]提出了不同频率分量幅值相位可控、任意频率可注入的自适应频谱塑形主动控制算法,并在舱段柱壳模型进行了在线试验,验证了所提出的广义频谱塑形主动控制算法的有效性和优越性。
传统ANE算法是通过初级噪声的估计来形成伪误差信号的,其中的增益参数只对初级噪声估计做幅值的缩放,且保持相位不变,所以它并无相位塑形能力。因此,在传统的ANE算法中引入改进FXLMS结构,获得MANE算法,通过目标信号的设计和初级噪声信号的估计重新构造MANE算法中的塑形滤波器,即可获得能够实现幅值相位可控、任意频率注入的广义频谱塑形主动控制算法。广义频谱塑形主动控制结构如图12所示。

图12 幅值相位频谱塑形控制(APC)算法[81]Fig.12 Amplitude and phase spectrum reshaping control algorithm
主动控制系统的结构如图13所示,使用一个四舱段柱壳模型进行在线试验验证,如图14所示。在线主动控制试验在舱内隔振平板上布置振源和测点1作为参考传感器,在壳体外侧布置测点2作为误差传感器,并且在壳体内利用弹性绳悬挂的激振器模拟惯性式作动器。

图13 主动控制系统结构Fig.13 The architecture of active control system

图14 主动控制系统及舱段模型实物[82]Fig.14 Active control system and cabin model
在线主动控制试验系统中采用小型偏心电机模拟初级振源,振源的基频为47.88 Hz,分别控制前4阶谐波,即47.88 Hz、95.76 Hz、143.64 Hz、191.52 Hz。此外,在频率注入的应用中还考虑第5阶谐波,即239.4 Hz。采用广义频谱塑形主动控制算法的主动减振模式误差信号见图15,可以看出,误差信号的幅值在时域上获得了衰减,在频域上前4阶谐波成功被消除。

图15 主动减振模式时的误差信号[82]Fig.15 Error signal in active damping mode
采用广义频谱塑形主动控制算法的频谱塑形模式的误差信号见图16,可以看出,误差在时域上某些时刻有放大作用,在频域上第1、3和4阶谐波被成功消除,第2阶谐波被增强,第5阶谐波处做了频域注入。
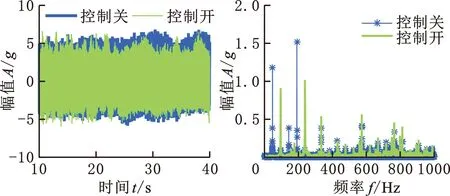
图16 频谱塑形模式时的误差信号[82]Fig.16 Error signals in spectral reshaping mode
舱段柱壳模型进行在线试验验证中,所提算法成功地实现了频谱塑形主动控制和主动减振控制,验证了所提算法的有效性和优越性。
3.2 圆柱薄壳结构的多目标频谱塑形控制
针对舰艇中的大型圆柱薄壳结构,张兴武等[86]提出了基于神经网络的多目标频谱塑形控制方法,并且通过大型薄壳结构的八点多目标频谱塑形控制,验证了该方法的有效性与可行性。
基于神经网络算法和频率特性的多目标频谱塑形控制架构如图17所示。整个系统由5个部分组成:神经网络控制器、神经网络辨识器、被控薄壳结构、数据采集、傅里叶变换。其中,辨识器采用两层线性网络结构,控制器采用三层网络结构,输入层与隐层之间采用线性映射结构,隐层与输出层之间采用S型映射结构。

图17 多目标频谱塑形控制架构[86]Fig.17 The architecture of multi-objective spectral reshaping control
结合全局频域误差和特征频点误差构造了混合性误差评判准则,其中使用全局频域误差优化参数可保障控制过程的稳定性,并且混合型误差准则可以提高多目标频谱塑形算法的自适应性与对噪声的抗干扰能力。然后,针对多个观测点的相互耦合问题,进行可控性分析,得出传感器与作动器数目相等可以保证多目标的可控性的结论。
使用薄壳结构进行了多目标频谱塑形控制试验,试验系统如图18所示。试验系统由以下部分组成:传感器及作动器、数据采集系统、直流电源、功率放大器、薄壳结构等。试验中使用8个传感器和8个作动器,作动器分别安装于传感器对应的内壁上,均位于薄壳结构的中上部。

图18 薄壳结构的多目标频谱塑形控制试验系统[86]Fig.18 Multi-objective spectral reshaping control test system for thin shell structure
试验目的是实现8个作动器的同步多目标频谱塑形,目标是使8个观测点位置的振动响应频谱同时达到 70 Hz处0.003g、80 Hz处0.004g、90 Hz处0.001g、100 Hz处0.002g、110 Hz处0.003g、120 Hz处 0.004g、130 Hz处0.001g、150 Hz处0.002g。初始状态中,8个观测点的振动响应频谱相似,但幅值各有差异。试验结果如图19所示。

(a)观测点1原始振动 (b)观测点1受控后振动 (c)观测点2原始振动 (d)观测点2受控后振动

(e)观测点3原始振动 (f)观测点3受控后振动 (g)观测点4原始振动 (h)观测点4受控后振动

(i)观测点5原始振动 (j)观测点5受控后振动 (k)观测点6原始振动 (l)观测点6受控后振动

(m)观测点7原始振动 (n)观测点7受控后振动 (o)观测点8原始振动 (p)观测点8受控后振动图19 薄壳结构的多目标频谱塑形结果[86]Fig.19 Multi-objective spectral reshaping results for thin shell structures
试验结果表明,采用上述基于神经网络的多目标频谱塑形控制方法实现了8个作动器的同步频谱塑形,使8个观测点同时达到了目标振动频谱,并且满足控制精度和效率要求,验证了基于神经网络的多目标频谱塑形控制方法的有效性与可行性。
4 未来研究趋势
针对舰艇的声隐身需求,本文综述了自适应频谱塑形主动控制的研究进展,展现了频谱塑形主动控制在舰艇领域的应用,但同时也面临诸多难点,存在以下发展趋势:
(1)精确模型。在自适应频谱塑形等主动控制方法中都需要准确的系统模型,但对于舰艇等复杂的非线性结构,传统的动力学建模和系统辨识方法无法获得精确模型,而近年来广泛应用的智能算法具有强大的非线性拟合能力,因此,可以研究结合智能算法的系统辨识方法,以便对复杂系统建立准确模型。
(2)智能控制。目前针对复杂结构的减振降噪主动控制研究主要是对系统中的部分振动源或者部分关键位置建立主动控制系统,无法将复杂系统的总体振动和噪声降至目标要求,但若是简单同时运行不同的控制系统或增加控制目标点,则易引起耦合效应,具有增大振动和噪声的风险。因此,开发多点、全局智能控制方法也可作为未来研究的方向之一。
(3)多源反馈。在主动控制系统中,控制反馈信号的选取影响着系统的稳定性,传统主动控制方法通常采用单一的反馈信号。但多点的位移、速度、加速度响应信号以及激励力信号等多源数据都可作为控制反馈信号。多源数据具有不同的特征,单一反馈信号不能够充分利用系统的多源信息。另外,多源数据大多是非线性的,因此,关于融合多源非线性数据并作为反馈信号的控制方法的研究也将成为提高主动控制系统性能的潜在手段之一。
5 结语
随着高技术武器系统及信息技术的发展,舰艇的隐身性能直接影响其生存能力和作战能力,具有隐蔽自己和先敌发现的双重战术。舰艇的低频线谱噪声被视为其声隐身性的重大威胁,而主动控制凭借其灵活性和对低频控制效果好的优点,在舰艇降噪中具有可行性。但主动消振、隔振、吸声等主动控制方法在达到一定效果后很难继续推进。因此,对舰艇声隐身提出了新的需求,从声学角度入手研究具有辐射噪声特性可变的主动控制技术,以实现对敌方声呐形成信息误导。针对舰艇的声隐身需求,本文对自适应频谱塑形主动控制的研究进展进行了综述和概括,并举例阐述了自适应频谱塑形主动控制在舰艇声隐身的可行性和有效性。随着主动控制技术和智能算法的不断发展,舰艇声隐身性具有很大的发展潜力。
猜你喜欢
环球时报(2022-12-30)2022-12-30
凤凰动漫(军事大王)(2022年3期)2022-06-17
现代农村科技(2021年2期)2021-03-15
绿色科技(2019年12期)2019-07-15
当代陕西(2019年11期)2019-06-24
兵器知识(2017年10期)2017-10-19
科技视界(2016年19期)2017-05-18
文史博览·文史(2016年1期)2016-02-20
现代企业(2015年8期)2015-02-28
中小企业管理与科技·中旬刊(2014年10期)2015-02-03
