
船闸水域船舶列队协同停船预测控制器
2022-03-09 13:48雷超凡初秀民柳晨光吴文祥李松龙
中国机械工程 2022年4期
雷超凡 初秀民 柳晨光 吴文祥 李松龙
1.武汉理工大学国家水运安全工程技术研究中心,武汉,4300632.武汉理工大学智能交通系统研究中心,武汉,4300633.武汉理工大学交通与物流工程学院,武汉,430063
0 引言
作为沟通水系、提高航道等级、改善水流条件的通航建筑物,船闸一直是内河航运基础性控制节点[1]。船闸水域航运智能化水平的不足会严重制约内河智能航运的发展。提高过闸安全性和效率是船闸智能化的重要目标。由于船闸水域船舶航行具有区域受限、间距紧密、操纵困难等特点,因船舶操控失误而引发的闸室浮式系船柱损坏、闸门被撞等事故时有发生。此外,目前广泛采用人工操控船舶依次进出闸室的过闸方式,缺少对船闸内各船舶的集中调控,这种过闸方式是制约船舶过闸效率提升的重要原因[1-2]。在闸室内多船协同精确停船控制能够显著缩短船舶在船闸水域的滞留时间,增加闸室空间的利用率,也能减少因人为操作失误导致的安全事故发生。LIU等[1]提出了一种将领导-跟随法与基于行为法相结合的过闸编队控制系统,并设计了可切换的不同控制模式,利用实船平台验证了该系统能够提高船舶过闸安全性和效率;胡亚安等[3]通过在三峡船闸对4.5 m吃水船舶进行同步移舶过闸试验,得出停泊安全是制约船闸通过能力的主要因素的结论;张勃等[2]对葛洲坝船闸船舶出闸运动进行了研究,提出了“全同步出闸”和“半同步出闸”方式,验证了同步出闸可以缩短船舶出闸时间。
船舶在闸室水域内的停船运动可归结为直航减速运动,船舶列队停船运动可归结为直航协同运动。目前对直行协同运动的研究以车辆的自适应巡航控制系统最为典型,该系统在车辆领域已经能够成熟地应用。谢辉等[4]利用模型预测控制(model predictive control,MPC)算法设计了两层控制器,分别用来计算期望加速度和协调驱动与制动,实现了无人驾驶车辆的横纵向运动控制;孙涛等[5]针对交通灯场景下的车辆协同自适应巡航控制问题,利用MPC算法设计了可切换的控制器,提高了舒适性和燃油经济性。在航行器控制方面,李振福等[6]针对北极冰区航行环境,研究了船舶跟航模式下北极冰区的船舶安全间距;干伟东等[7]针对通航隧洞中的船舶跟驰问题,提出了一种船舶跟驰安全间距计算方法,发现其安全间距与船舶所处位置有关;吴文祥等[8]设计了基于MPC的船舶直航协同控制方法,能够实现对预定变加速度目标船的跟随。利用MPC算法解决非线性系统及多约束问题的独特优势,可完成对单体船舶运动及多船舶编队航行的有效控制[9]。但现有研究中针对闸室停船行为进行描述的报道较少,且对闸室内船舶协同停船的整体性考虑不足[10]。
本文在建立闸室水域船舶列队直航运动模型的基础上,采用速度-时间法和速度-位移法两种方法设定参考速度,完成单船停船动作MPC控制器设计,并在领航船按照上述两种方法完成停船的前提下,加入跟随船运动,设计三船协同停船运动MPC控制器,最后对停船控制的有效性进行了仿真验证。
1 闸室水域船舶列队直航运动模型
1.1 船闸场景描述
船闸水域通常包括引航道水域和闸室水域,如图1所示。过闸航行的船舶一般会经过引航道航行、进闸航行、停船系泊、闸间移泊、出闸航行等阶段。引航道是连接主航道和闸室的过渡性航道,保证船舶安全进入闸室。闸室水域是指上下闸首和两侧闸壁围成的空间。闸壁上设有浮式系船柱,供船舶在闸室内停泊系缆。在闸室内设有禁停线,所有船舶不能越过禁停线停船。

图1 船闸示意图Fig.1 Lock diagram
为更清楚地描述闸室内船舶运动,以列队中尾船的船尾位置为坐标零点,以N-S坐标系中正北方向作为入闸方向,并以入闸方向为船舶直航运动坐标正方向建立坐标轴X。
1.2 船舶三自由度运动模型
船舶运动需6个自由度描述,即前进、横漂和起伏用来描述船舶的位置信息,首摇、横摇和纵摇用来描述船舶的运动速度信息[11]。一般研究船舶轨迹或路径运动问题时,仅使用前进、横漂和首摇三自由度模型描述如下:
(1)

c23=m11uc31=m22v+0.5(m23+m32)
其中,x=(x,y,φ)T表示惯性坐标系下船舶的位置和方向;v=(vu,vv,vr)T表示随体坐标系下船舶的速度和角速度;τc=(τu,τd,τr)T表示控制输入的力和力矩;τD=(fdu,fdv,tdr)T表示干扰力和力矩;T表示坐标变换矩阵,用于实现随体坐标系向惯性坐标系的转换;M表示惯性矩阵;C表示科氏向心矩阵;D表示阻尼矩阵。
将s(t)=(x,y,φ,vu,vv,vr)T设定为系统的状态变量,u(t)=(τu,τd,τr)T设定为控制输入,τD(t)=(fdu,fdv,tdr)T设定为干扰,则其状态空间方程可表示为

(2)
本文利用生成均匀分布的随机数来设置干扰,表示为
(3)
式中,randi(·)为均匀分布的随机整数;σ为权重参数。
1.3 船舶直航运动模型
1.3.1直航运动解耦
船舶列队是指多艘船舶按照航行方向形成单向队列,船舶三自由度模型是船舶平面运动的总体描述,针对闸室内船舶直航列队运动进行研究,可以将三自由度模型进行解耦,转化为直航运动模型,本文利用解耦矩阵pi来完成。船舶直航运动模型坐标关系见图2。

图2 坐标关系Fig.2 Coordinate relationship
状态变量xl(t)设定为船舶直航方向坐标位置和航行方向速度:
(4)
控制输入变量ul(t)设定为船舶直航推进力:
ul(t)=p2τc(t)=τu(t)
(5)
干扰量el(t)设定为直航运动方向上的干扰力:
el(t)=p2τD(t)=fdu(t)
(6)
则状态空间方程变为直航运动状态空间方程:
(7)
1.3.2模型线性化
针对非线性系统,可以直接利用非线性MPC求解最优控制序列,但非线性求解过程复杂,不能保证实时性,而船闸航行环境对算法实时性要求高,故本文的仿真采用对模型线性化后求解最优控制序列的方法。
假设参考系统给出的参考状态量能够完整完成目标航行任务,在获取航行路径上每一时刻状态量和控制量的基础上,构造真实状态量与参考量的偏差,利用偏差设计控制器完成目标航行任务。参考量方程表示为
(8)
对船舶航行任意时刻的直航运动状态空间方程在参考点处进行一阶泰勒展开,去掉高阶项并代入参考系统,得
(9)
将式(9)与式(8)相减得到需要的偏差表达式:
(10)
1.3.3模型离散化
采用近似离散化方法对状态空间方程进行离散化处理,近似离散化方法计算公式为
(11)
式中,Ts为离散化步长;Adis、Bdis分别为离散化后的状态矩阵和输入变量。
离散化后的状态空间方程可用作预测模型,表示为
(12)
1.4 船舶列队间距模型
建立3艘船舶列队航行的间距模型,其状态变量xh(t)和控制变量uh(t)设定见下式:
(13)
式中,d1(t)、d2(t)分别为首船与中间船、中间船与尾船的船间距。
根据协同入闸船舶的直航运动关系,建立入闸船队运动的状态空间方程:
(14)
式中,xli(t)为入闸船队中第i艘船舶的直航运动状态变量。
为提高控制实时性,采用欧拉法进行离散化。根据编队运动关系,将式(14)离散化后可以得到入闸停船控制系统船间距模型的离散状态方程:
(15)
领航船在完成单船控制时的控制误差会对上层控制器带来不必要的计算量,并且影响上层控制器对跟随船的控制效果。为了削弱这种影响,将领航船的真实航速与参考航速按照一定权重混合后作为上层控制器的输入值:
vint(t)=γvref(t)+(1-γ)v1(t)
(16)
式中,γ为权值。
式(15)可变为
(17)
综上所述,船舶列队运动模型的建立过程可用图3表示。

图3 模型建立流程Fig.3 Model building process
2 单船停船模型预测控制器
模型预测控制采用滚动优化机制[6],具有显式处理约束的能力,算法利用预测能力可以解决系统误差和不确定环境的参数等问题,具有良好的鲁棒性。
2.1 参考状态设计
结合船舶直航运动模型的状态量为控制系统设计参考状态量xlref:
(18)
式中,xref(k)为位置参考量;vuref(k)为速度参考量。
本节采用速度-时间法和速度-位移法这两种方法设置速度参考量。
2.1.1速度-时间法
速度-时间法是指在停船航行运动过程中,每一个时间对应一个参考航速值。在停船动作连续的情况下,按照停船时间进行匀减速停船是一种保证船内平顺性和节能性的理想方法。但实际停船所用时间往往不能固定,故本文设定以0.5倍初速度匀速航行完成停船距离所用时间作为预设航行时间。仿真环境中,船舶运动的参考量设定为
(19)
式中,xaim为目标停船坐标;v0为初速度;as为设定加速度。
将参考量进行离散化处理后得到每一控制时刻的参考量:
(20)
式中,Nref为参考时刻点的个数。
2.1.2速度-位移法
速度-位移法是指在停船航行位移线上,每一个位移值对应一个参考航速值,参考值可按照到停船线距离匀减速设置。速度参考量设置可描述为
uref=v0-ρx
(21)
式中,ρ为匀变速常数,ρ=v0/xaim。
由于在实际停船过程中往往是通过停船线位置来衡量停船行为的,故将式(21)作差值形式转换如下:
uref=ρ(xaim-x)
(22)
速度-位移法是更贴合驾驶员行为的一种停船方式,人们在驾驶时往往通过判断与前方障碍物的距离选择驾驶的制动尺度,与前方障碍物距离越近,则使用越强的制动力。
在仿真中,建立速度随距停船线距离变化的函数,在预测步长内,取每一步的船舶位置信息,利用函数得到对应的参考速度来构成当前时刻的速度参考矩阵。
2.2 目标函数设计
结合式(4)、式(18),构造k时刻系统偏差量:
De(k)=xl(k)-xlref(k)
(23)
在预测时域中,以系统偏差量为控制目标,设置一个加权形式的目标函数来描述待优化问题:
(24)
式中,Jsing为单船入闸停船运动的目标函数;Np为预测步长;Nc为控制步长;Q为权重矩阵;R为权值;Δu为控制量偏差(本文参考控制量取0)。
通过上述变化,单船入闸停船运动控制的优化问题就可描述为求解约束条件下使目标函数Jsing值最小的控制量ul(k)。
考虑到船舶受动力机构机械性能的影响,对控制量和控制增量的约束设置如下:
ulmin(k+i)≤ul(k+i)≤ulmax(k+i)
Δulmin(k+i)≤Δul(k+i)≤Δulmax(k+i)
i=0,1,…,Nc
3 船舶列队停船模型预测控制器
3.1 场景描述
以3艘船协同入闸停船航行为例,如图4所示,经过引航道后,船S1、S2、S3沿直线列队入闸停船。An、Bn和Ln分别表示船Sn的船首、船尾位置和船长(n=1,2,3)。在入闸任务的任意时刻k,船S1、S2、S3的航速分别表示为Vu1(k)、Vu2(k)和Vu3(k)。船S1、S2的间距B1A2为d1(k),船S2、S3的间距B2A3为d2(k)。

图4 协同入闸场景示意Fig.4 Synergistic gate entry scene
3艘船列队入闸,它们分别要完成直线入闸停船的任务。在协同入闸场景下,船舶间距小,航行操纵频繁,控制器既要完成每艘船的停船任务,又要保持动态船间距,保证航行安全性。
将单船运动仿真中的船舶位置定义为船首位置,结合船长可得到船间距:
(25)
3.2 控制器设计
如图5所示,协同入闸系统的控制器设计分为上层控制器和下层控制器。

图5 列队停船控制器结构Fig.5 Ship platoon parking control structure
上层控制器是集中控制器,用于计算船舶列队的协同控制信息。对于船闸水域,集中式上层控制器可以被看作岸基对入闸船舶的集中调配。集中式控制器是指由一个控制器求解整个系统的优化问题,将输出量发送给各子系统。与分散式和分布式控制器相比,集中式控制器得到的控制输出和系统性能都是最优的,但对集中控制器的依赖较强且控制器的计算负担较重。
岸基上层控制器接收各入闸船舶发送的当前位置、速度,根据式(25)计算得到船间距,代入船间距模型中得到预测时域内船间距预测值,进而计算出各船舶的期望速度向量并传递给各船舶的下层控制器。
下层控制器的设计采用单船停船模型预测控制器,下层控制器将上层控制器的控制输出量作为下层控制器的参考量,计算得到所需的推力ul并作为输出量传递到船舶,船舶执行后将新的位置、速度等信息反馈到上、下层控制器中。
3.3 上层控制器目标函数设计
船舶列队入闸控制的控制目标为保持期望船间距并精准停船。其中,精准停船问题可利用领航船的下层控制器完成,上层控制器则负责保持期望船间距,因此,在预测时域中,上层控制器的目标函数设计如下:
(26)
式中,Jglob为协同控制的目标函数;H、K为权重矩阵;Npt为上层控制器的预测步长;Nct为上层控制器的控制步长;C为上层控制器输出控制量。
第p个船间距与设定船间距之差Δdp为
Δdp=dp-dpaim
式中,dp为船间距的真实值,可由式(25)得到;dpaim为船间距的目标值。
船舶列队入闸停船运动控制的优化问题可描述为求解约束条件下使目标函数Jglob值最小的控制向量C(t),即每艘入闸船舶的下层控制器提供参考速度。
考虑到每艘船舶的动力机构机械性能的不同,按照第2节中停船方式航行的要求,对于各船舶控制量和控制增量的约束设置如下:
Cmin(k+i)≤C(k+i)≤Cmax(k+i)
ΔCmin(k+i)≤ΔC(k+i)≤ΔCmax(k+i)
i=0,1,…,Nc-1
4 仿真实验
4.1 仿真模型
本文选择一艘3500 t油化船实船作为研究对象,船长为94.6 m,船宽为17.2 m,设计吃水深度为5 m,螺旋桨在最大转速下的推力为180 kN。该模型对应的系统参数为
m11=mrb+ma=5990 929+297 670=6288 590(kg)
式中,mrb为船舶直航质量;ma为直航附加质量。
d11采用经验公式拟合的方法,其大小随航速变化,变化关系如图6所示。
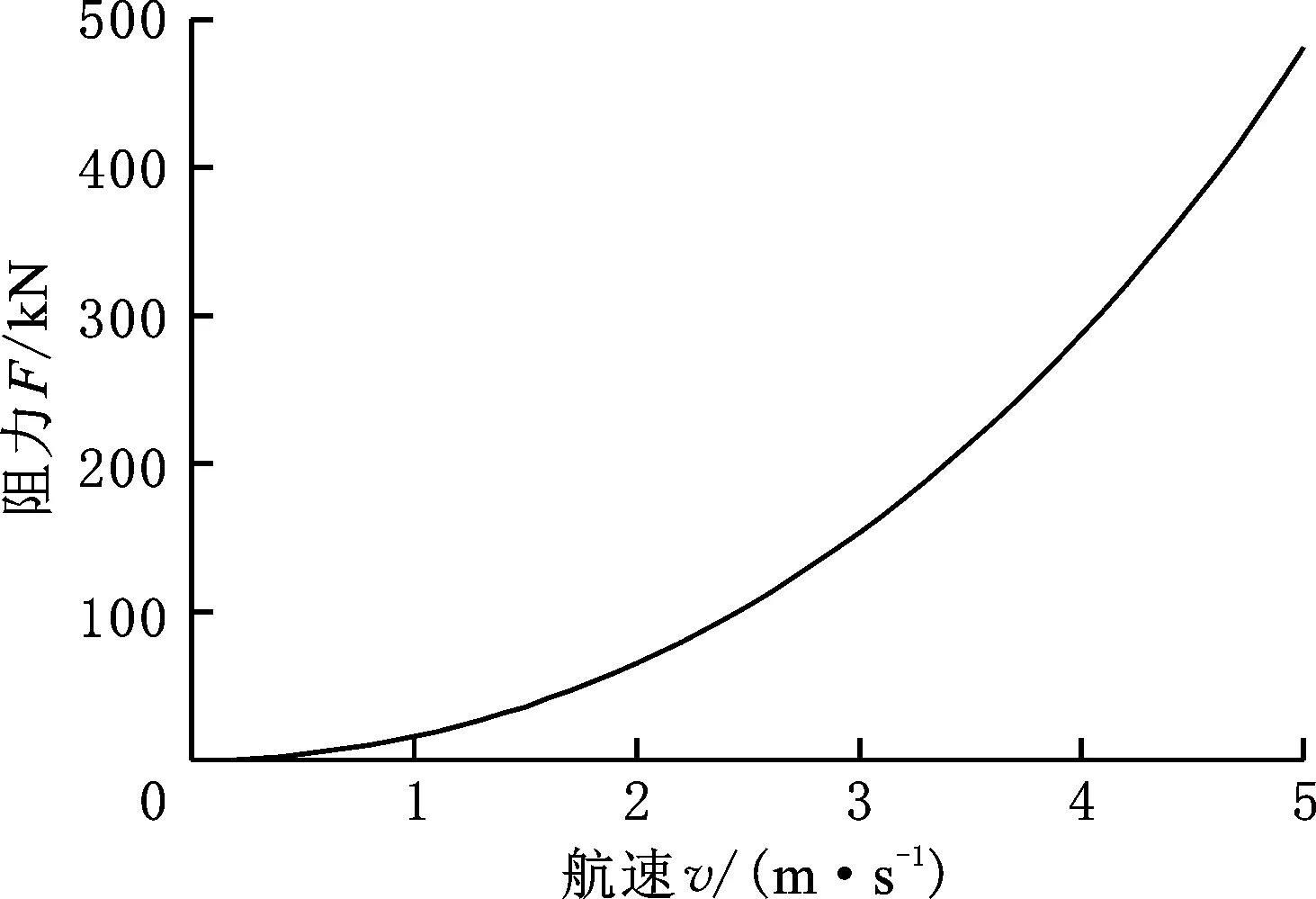
图6 阻力曲线Fig.6 Resistance curve
4.2 单船停船控制仿真实验
4.2.1最短停船距离计算
采用MATLAB软件对本文控制方法进行仿真验证。为保证停船的安全性,首先验证在最大制动力下不同初速度v0船舶的最短停船距离dmin,在所选船型实际航行过程中,螺旋桨产生的推进或制动力一般满足区间-180 kN<τu<180 kN,故在不同初速度下给定τu=-180 kN进行实验,初速度在0~1.5 m/s间每隔0.05 m/s取一个样本点,取Ts=2 s,得到30组初速度-最短停船距离的关系,然后用五次函数进行函数拟合,得到的函数关系如下:
(27)
其函数图像如图7所示。根据该函数可计算出在不同初速度下船舶完成停船的安全距离,函数平均拟合误差为0.0161 m。利用两种参考速度的设置方法对初速度为1 m/s的模型船入闸停船行为进行仿真,给定停船距离为290 m。

图7 船舶初速度-最短停船距离关系Fig.7 The relationship between initial speed and minimum stopping distance
4.2.2速度-时间法
根据1 m/s初速度,本次仿真时间预设为580 s。离散化后的参考量设定为
(28)
式中,Nref取290。
目标函数中权重矩阵及权值分别设置为
R1=1.5×10-11
船舶动力机构约束设置为
-180 kN≤ul(k+i)≤180 kN
-30 kN≤Δul(k+i)≤30 kN
i=0,1,…,Nc-1
控制器的控制步数和预测步数设置为
Nc=Np=6
干扰大小设置为
τD∈[-3,3] kN
仿真运行后得到的距离、速度和控制器输入结果分别如图8 ~图10所示。
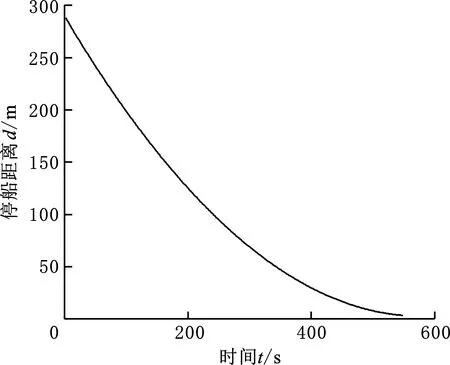
图8 停船过程中距离动态变化(速度-时间法)Fig.8 Dynamic change of distance during stopping(speed-time method)

图9 停船过程中速度动态变化(速度-时间法)Fig.9 Dynamic change of velocity during stopping(speed-time method)

图10 停船过程中控制器输出力(速度-时间法)Fig.10 Control output force during stopping(speed-time method)
设定船舶航速小于0.05 m/s时即认为停船任务完成,本次仿真实验完成停船共用时572 s,航行距离为286.51 m。
由图8可以看出,由于初期速度较大,船舶到停船线的距离减小的速度较快,距离小于50 m后,减小速度趋于平稳,最终能较为准确地停在停船线之前。由图9可以看出,仿真30 s前,由于初始控制量为0,输出推力与阻力的合力暂时难以为船舶提供指定的负加速度值,且位置距停船线较远,距离差数值较大,所以在目标函数的值中,距离差所占比重大。此时为了到达目标位置,船舶在短时间内保持初速度甚至稍有加速航行,同时输出控制力迅速变化,距离随之迅速减小,参考速度在目标函数中的权重开始变大,速度曲线逐渐与参考速度曲线重合。结合图10,仿真进行20 s时,控制器预测到船舶受力达到期望加速度要求,便不再提供更大的负推力,控制量输出变化早于速度变化,可体现出预测控制的优势。由图10可以看出,控制器输出力在面对随机干扰时能够做出积极的响应,具有良好的鲁棒性,但在仿真300 s后有一定的短时波动。
4.2.3速度-位移法
将速度-时间法中生成的干扰向量应用到速度-位移仿真当中,其余仿真参数均与速度-时间法相同。得到的仿真结果如图11~图14所示。同理,设定船舶航速小于0.05 m/s时即认为停船任务完成,本次仿真实验完成停船共用时860 s,航行距离为276.16 m。

图11 停船过程中距离动态变化(速度-位移法)Fig.11 Dynamic change of distance during stopping(speed-displacement method)

图12 停船过程中速度动态变化(速度-位移法)Fig.12 Dynamic change of velocity during stopping(speed-displacement method)

图13 停船过程中速度随位移变化(速度-位移法)Fig.13 The velocity varies with displacement during stopping (speed-displacement method)
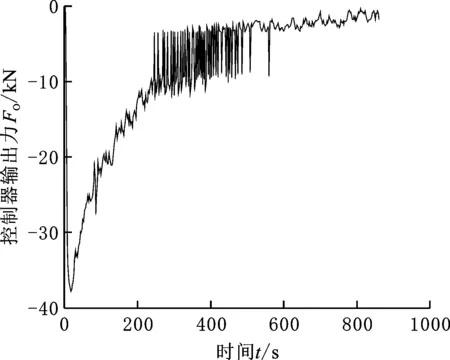
图14 停船过程中控制器输出力(速度-位移法)Fig.14 Control output force during stopping(speed-displacement method)
由图11可以看出,相比图8的距离变化过程,采用速度-位移法减速整体距离变化较为平缓,500 s后船舶才到达距离停船线50 m处,且最终的停船位置距停船线更远。由图12和图13可以看出,与速度-时间法仿真类似,采用速度-位移法的初期同样有一段时间的速度增加,之后速度随时间有一段迅速下降过程,速度小于0.3 m/s后减速过程趋于平缓。距离停船线140 m以内,船舶几乎随到停船线距离的减小做匀减速运动,并在停船运动中后期与参考速度曲线重合。图14反映了停船过程中控制器输出制动力的变化,在运动初期的一段时间内,系统提供了较大的负推力使船舶达到当前航速的动态平衡,平衡状态在25 s时进入控制器预测时域,并在35 s时达到平衡。仿真进行到256 s时,控制器输出出现一定波动,并在478 s后恢复平稳,最终控制器输出趋近于零。相比速度-时间法,速度位移法在仿真结束时的控制量较小,具有更好的应变能力。
4.2.4结果对比分析
以航行经济性、平顺性及船闸效率作为评价标准,设计评价指标来衡量停船控制效果。经济性可通过停船运动消耗能量来表示,平顺性可通过最大加速度和加速度方差来表示,船闸效率用闸室单次运行时间来表示:
(29)
式中,WS为运动耗能指标;WC为航行平顺性指标;T为运动总用时;It为仿真总步数;amax、as分别为加速度的最大值和平均值。
用上述变量构造评价指标:
KP=(μ1WS+μ2WC)(T+Tg)
(30)
式中,KP为评价指标;Tg为船闸停船间歇时间;μ1、μ2为权值。
取μ1=0.6,μ2=80,Tg=300 s。单船停船运动仿真中两种速度控制方式的运动评价见表1。

表1 单船停船运动评价指标Tab.1 Single ship stopping motion evaluation index
评价指标对应数值越小表示该方法在该指标下表现越好,由评价指标数值的对比看出,速度-时间法在船舶的航行时间和平顺性上具有明显优势;在经济性方面,速度-位移法具有优势。结合整个船闸通航效率而言,速度-时间法可以做到更短的过闸航行周期,优势明显。
速度-位移法的优势在于停船任务末期,船舶航速变化已经很小,且推力也趋近于0,这样比较容易控制停船线附近的船舶行为,有利于船舶航行安全性。
4.3 船舶列队停船控制仿真实验
仿真工况如下:3艘船舶列队入闸完成停船运动,开始停船前各船的初速度均为1 m/s,且初始船间距为5 m,领航船在距停船线290 m处开始停船,设定目标船间距为5 m,后船在上层控制器的控制下跟随领航船完成停船。
上层控制器目标函数中的权值及权重矩阵设置如下:

参考权值γ=0.3。上层控制器的仿真约束设置为
(0,0)T≤C(k+i)≤(1.5,1.5)Tm/s
(-0.06,-0.06)Tm/s≤ΔC(k+i)≤
(0.06,0.06)Tm/s
i=0,1,…,Nc-1
为了既保证领航船控制停船位置,又跟随船更好地执行上层控制器指令,三艘船的下层控制器中权重矩阵及权值设置分别为
R1=R2=R3=1.5×10-11
用船舶惯性矩阵差异来表示船舶装载量差异,用控制器输出增量约束差异表现动力机构差异。则三艘船的惯性矩阵和仿真约束分别设置为
m11-S1=6288 590 kg
m11-S2=5388 590 kg
m11-S3=5788 590 kg
i=0,1,…,Nc-1
领航船按照速度-时间法完成停船得到的仿真结果如图15~图18所示。

图15 船间距动态变化(速度-时间法)Fig.15 Dynamic change of ship spacing(speed-time method)

图16 航速动态变化(速度-时间法)Fig.16 Dynamic change of speed(speed-time method)
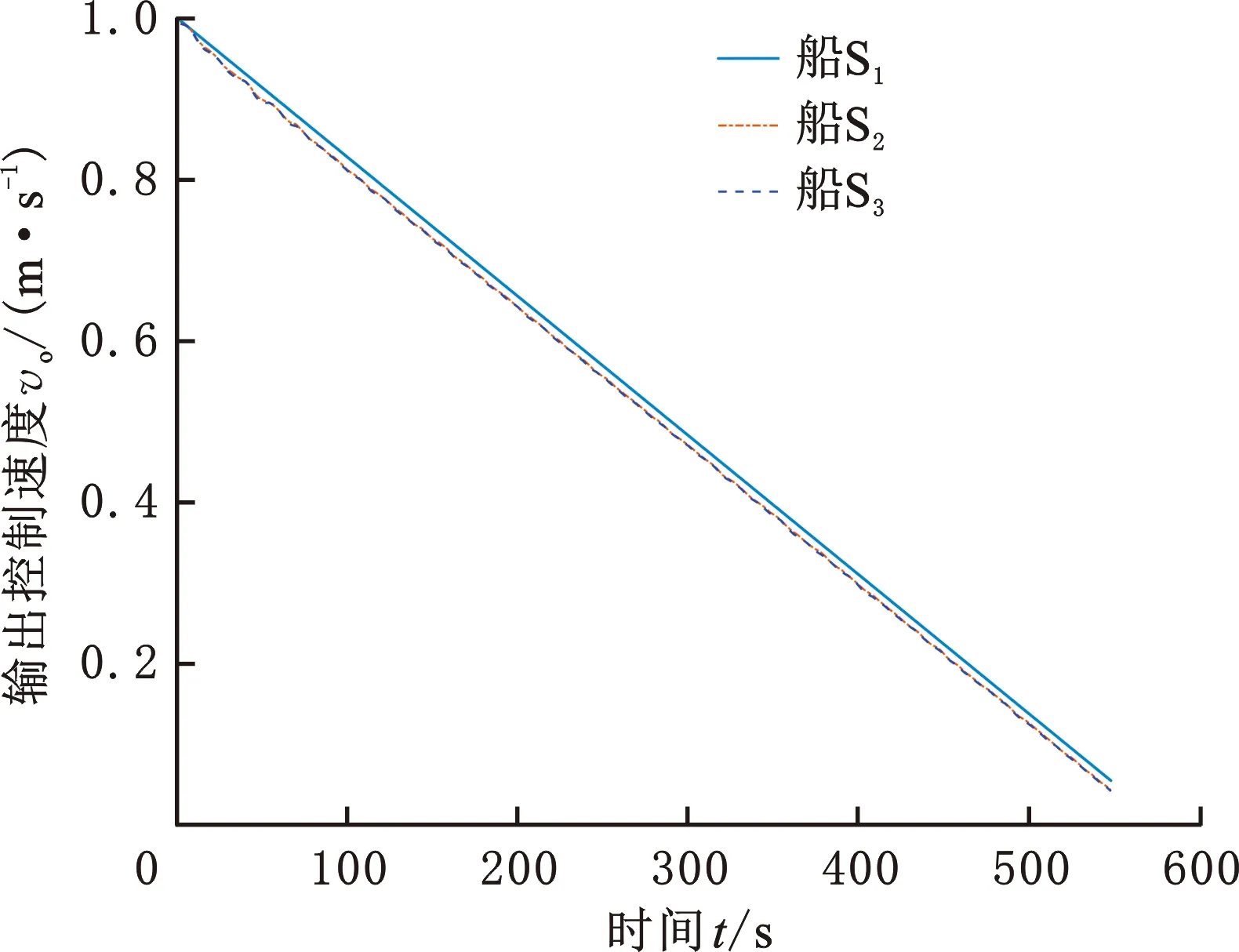
图17 上层控制器输出参考速度(速度-时间法)Fig.17 Upper controller output reference speed(speed-time method)
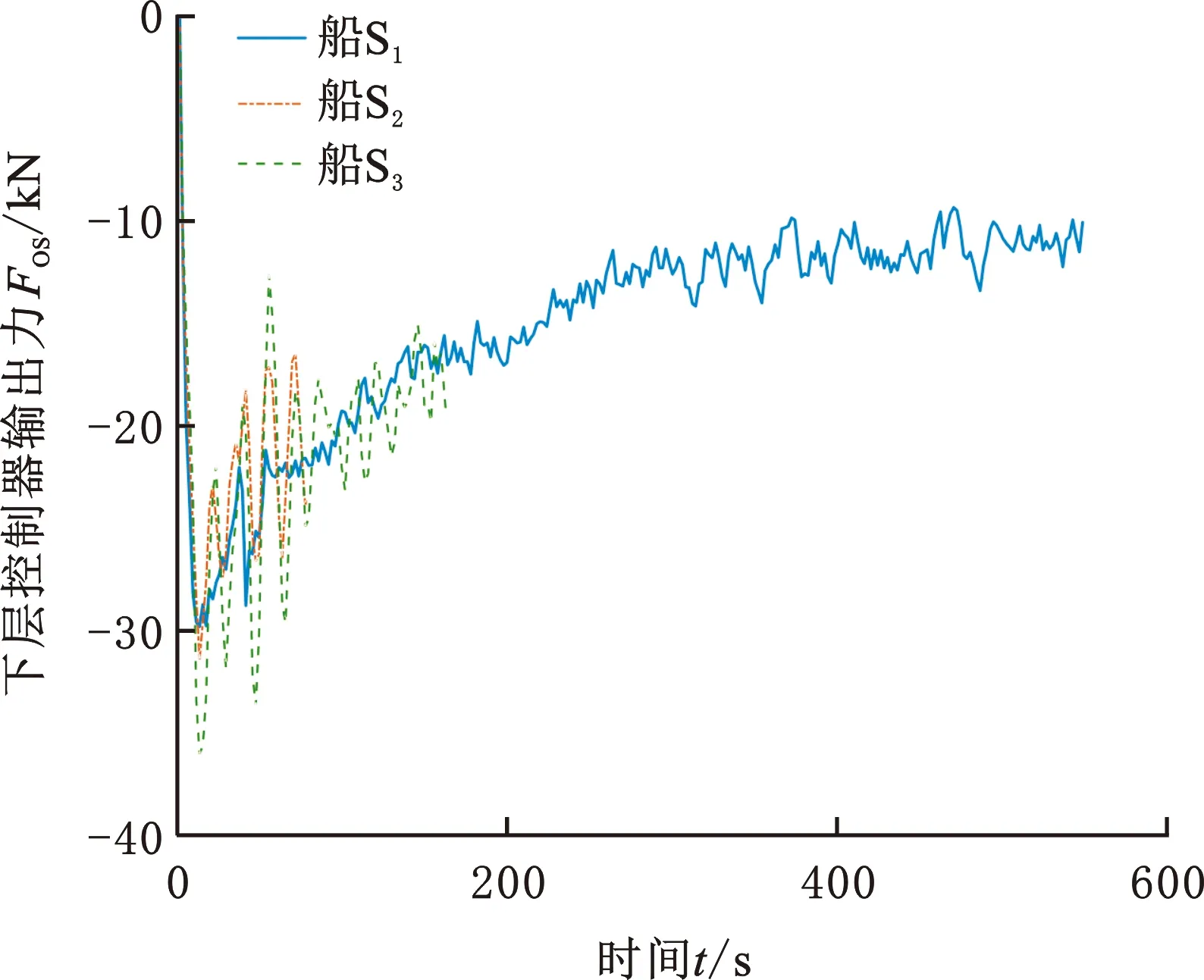
图18 下层控制器输出控制力(速度-时间法)Fig.18 Lower controller output force(speed-time method)
由图15可以看出,在列队停船过程中,船间距基本维持在设计跟船距离5 m附近,船间距1位于[4.9813,4.9992] m区间,船间距2位于[4.9934,5.0016] m区间。由图16可以看出,在仿真进行10 s内,领航船保持速度航行,跟随船航速围绕在领航船航速附近小范围波动,由于将领航船的参考速度与真实速度按一定权重混合后输入上层控制器,故跟随船避免了部分多余的航行操纵。由图17可以看出,上层控制器能够有效地根据领航船的航速变化对跟随船的航速进行控制,其输出曲线基本与领航船参考速度曲线相同,其间保持的固定差距是龙格库塔法和欧拉法解算的差距造成的。由图18可以看出,下层控制器能够有效应对随机干扰对船舶的影响,但同时对比三艘船的曲线后发现,由于跟随船的装载量大,动力机构性能较弱,控制器在进行减速控制时会表现得比较激进。
领航船按照速度-位移法完成停船得到的仿真结果如图19~图22所示。

图19 船间距动态变化(速度-位移法)Fig.19 Dynamic change of ship spacing(speed-displacement method)
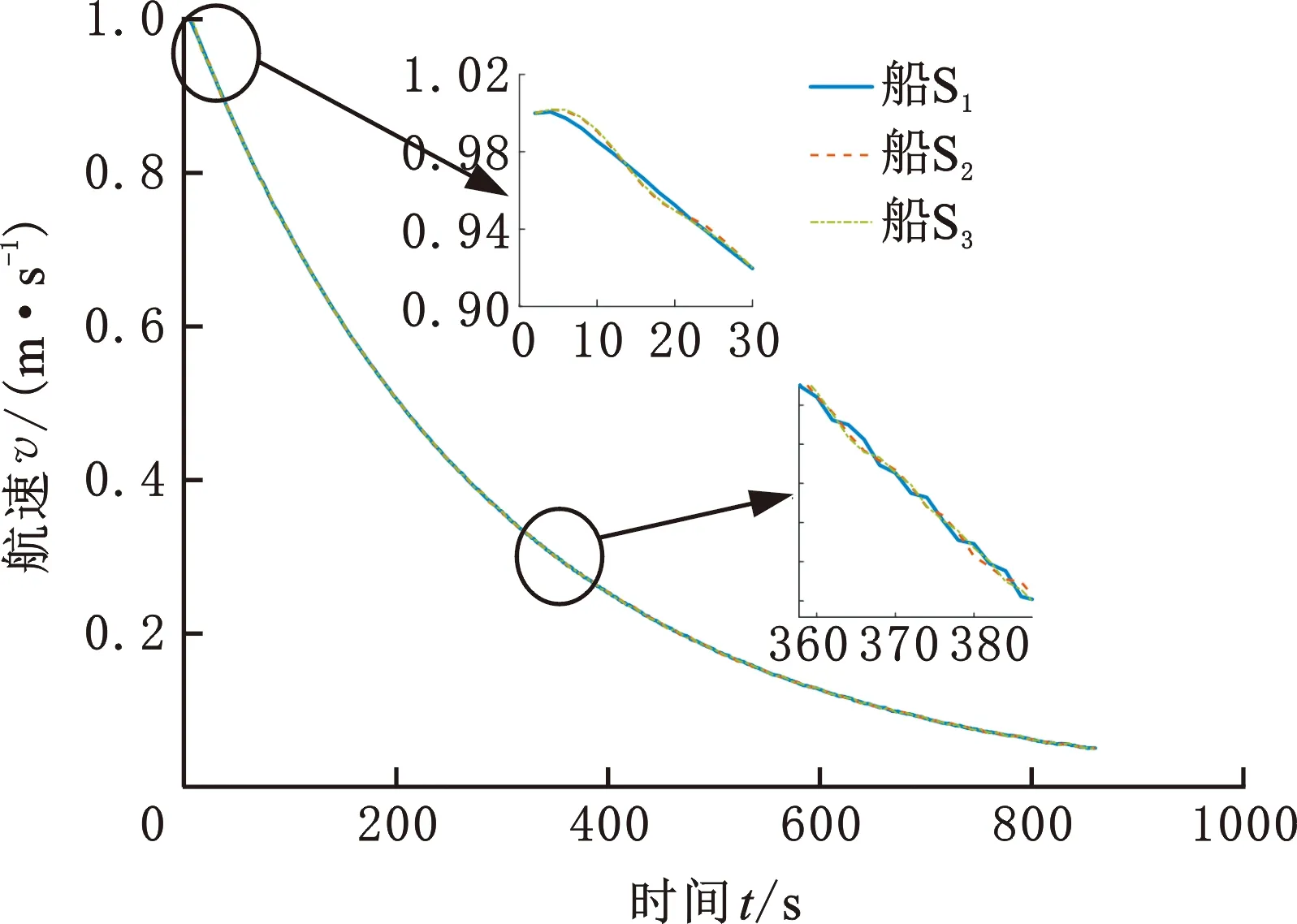
图20 航速动态变化(速度-位移法)Fig.20 Dynamic change of speed(speed-displacement method)

图21 上层控制器输出参考速度(速度-位移法)Fig.21 Upper controller output reference speed(speed-displacement method)

图22 下层控制器输出力(速度-位移法)Fig.22 Lower controller output force(speed-displacement method)
由图19可以看出,按照速度-位移法完成停船的过程中,船间距同样能够维持在设计跟船距离5 m附近,船间距1位于[4.9622,5.0038] m区间,船间距2位于[4.9911,5.0040] m区间。由图21和图22可以看出,上、下层控制器的输出量相比速度-时间法都有更明显的波动量,且跟随船的下层控制器同样表现更为激进。利用4.2节的指标对仿真结果进行评价,结果见表2。

表2 船舶列队运动评价指标Tab.2 Evaluation index of ship platoon movement
由表2可以看出,采用相同的控制方法时,跟随船的平顺性有一定的牺牲;同时载重更大、动力机构性能更差的船舶在能耗方面表现更差。对比两种控制方法,速度-时间法在平顺性上表现更好,速度-位移法在经济性上表现更好。
5 结语
本文以船闸内船舶运动仿真为基础,借助船舶运动学和船舶动力学模型,设计了基于模型预测控制的船舶入闸停船控制器,分两种航速控制方法对控制效果进行了验证,并设计了评价指标对合理停船动作进行了讨论。在单船完成闸室停船控制的基础上,建立了狭窄水域中的直航船间距模型,设计了基于模型预测控制的船舶协同入闸航行集中控制器,并验证了其控制效果。该控制器可为船舶协同入闸航行安全间距保持及效率提升提供参考,为狭小水域列队集中控制器的设计提供重要依据。
本文研究为单排列队直线入闸航行场景,在后续研究中可加入两排并行入闸场景,并行入闸在引航道中设计船舶旋回操纵性的异质,容易出现安全隐患。另外,本文研究忽略了船闸水域中由于船-船距离、船-岸距离近带来的船间效应及岸壁效应的影响,这在船舶低速航行入闸时会影响控制精度。后续研究可考虑三自由度运动中增加船闸水域中特殊环境的影响。
猜你喜欢
疯狂英语·新读写(2021年6期)2021-08-05
——史蒂芬·哈特克《列队》的音高组织方法之一
北方音乐(2020年24期)2021-01-27
水上消防(2020年4期)2021-01-04
儿童故事画报(2020年7期)2020-08-03
水运工程(2020年7期)2020-07-27
小学科学(2020年6期)2020-06-22
红豆(2019年6期)2019-05-28
中国交通信息化(2019年6期)2019-01-06
创新作文(1-2年级)(2017年7期)2017-12-26
安徽文学(2015年8期)2015-09-10
