
斑点抑制与多分辨率拓扑分析相结合的SAR图像河流水体提取
2022-03-07 13:11赵泉华
测绘学报 2022年1期
杨 蕴,李 玉,赵泉华
辽宁工程技术大学测绘与地理科学学院遥感科学与应用研究所,辽宁 阜新 123000
合成孔径雷达(synthetic aperture radar,SAR)以其全天时、全天候的对地观测能力,正广泛地应用于国防、国民经济建设以及防灾减灾等领域[1]。利用SAR成像技术近实时、精确地获取河流水体信息对于水资源调查、自然灾害评估以及环境监测等具有重大意义[2]。
由于水体表面相对平滑,其散射过程大多类似于镜向反射,因此在SAR成像过程中水体目标呈现出后向散射系数低、回波信号弱等特征[3],即在SAR图像中表现为暗色目标。在高分SAR图像中,河流水体在其宽度方向上通常占据若干像素,由此在几何上河流水体段表现为大小各异的多边形。综上,河流水体在高分SAR图像中表现为整体亮度较低且成弯曲分布的区域[4-5],这种鲜明特征使得图像分割成为对其快速识别和提取的重要途径之一。针对基于图像分割的SAR图像水体提取研究,目前已经提出如阈值、活动轮廓模型(active contour model,ACM)和边缘等方法。
基于阈值的分割法是针对SAR图像中水体具有的较低且相对一致的后向散射特性,通过选择低于给定阈值的像素来提取水体[6-11]。文献[9]使用最大类间方差(Otsu)法设定阈值并据此提取水体,而为了降低斑点噪声造成的误提取,运用数学形态学的方法对提取结果进行后处理。文献[11]首先通过直方图统计对SAR图像进行后向散射强度分析,然后以Otsu和Kittler and Illingworth(KI)法对图像进行水体-非水体分类。试验结果表明在SAR图像水体提取中KI方法比Otsu方法更具有优势。基于阈值分割的SAR图像水体提取方法具有简单易行、性能稳定等优点,但SAR图像固有的斑点噪声严重影响其提取精度,因此该类方法需与滤波预处理或提取结果后处理的方法相结合[12]。
ACM法包括参数ACM和几何ACM法[13-20]。参数ACM法的主要思想是通过在水体周围定义一条初始轮廓线,在能量函数的约束下不断向水体边界演化,最终演化为提取水体的边界。文献[13]以阈值分割结果的边缘线作为初始轮廓线,由参数ACM将边缘段连接成连续的水体边界线。由于参数ACM无法处理轮廓线的自动分裂与合并,使得其无法适用于提取具有建筑遮挡的河流水体。与参数ACM法相比,几何ACM法需确定的参数较少且能够实现轮廓线的自动分裂与合并。如,文献[19]由几何ACM法在SAR图像中提取海岸线,其首先利用C-V模型进行粗分割来提供初始轮廓线,然后采用G0分布对轮廓线上每一点的邻域进行统计建模以实现海岸线精确检测,但该方法计算效率低,实现复杂。文献[20]提出了一种基于定位区域ACM(Localizing Region-based ACM,LRACM)的SAR图像水体提取方法,其用拉普拉斯核距离代替欧氏距离来计算区域能量,并结合局部和全局灰度值计算拟合中心和局部半径,从而更好地控制曲线的演化,但缺点在于演化曲线易与水陆边界附近的噪声点相连接,不利于后续处理。
边缘法是基于SAR图像水陆光谱特征差异较大这一特性利用边缘算子定位水体边界[21-24]。如,文献[22]利用Prewitt算子结合轮廓因子进行边缘检测,以此提取河流水体。文献[23]将几种边缘检测算子(Sobel、Prewitt和Canny)应用于RadarSat-I SAR图像,并比较了它们检测水陆边界的能力,结果表明Canny算子具有最优的检测能力。对高分SAR图像,单纯采用基于边缘检测的方法难以提取水体的完整边界线,因此通常需要与其他方法相结合。如,文献[24]提出了一种结合指数加权均值比和水平集(ratio of exponentially weighted averages and level set,ROEWA-LS)的河流水体提取方法,其由ROEWA算子检测到的边缘为约束,利用ACM进行分割,结果表明该方法可较好地从高分SAR图像中提取河流水体。
虽然基于阈值、ACM、边缘及其相结合的方法在水体提取各具优点,但其均对SAR图像的斑点噪声非常敏感。故无论是在提取河流水体还是其他对象前,对SAR图像进行降噪预处理已成为提高提取精度的一个有效途径[25-28]。SAR图像的斑点噪声与光学图像中被广泛研究的加性噪声不同,它属于乘性噪声且很大比例处于高频部分。针对SAR图像的斑点噪声抑制问题,目前已提出了如Lee、Kuan、Frost和SRAD(speckle reducing anisotropic diffusion,SRAD)等滤波器。虽然Lee、Kuan和Frost滤波器具有一定的降噪能力,但均存在对滤波窗口大小和形状敏感、边缘保持稳健性弱等缺点[29]。针对此,一些学者提出了Lee、Kuan和Frost的增强版本[30-32]及精致Lee和自适应精致Lee(adaptive refined Lee,AR-Lee)滤波器[33-35]。在文献[35]中,AR-Lee的自适应表现为自适应窗口大小,它以子窗口建立中心和邻域窗口,根据边缘检测和相邻窗口相干系数区分同质和异质区域,从而选择合适的窗口大小。该方法较固定窗口大小的精致Lee,可较好抑制斑点噪声,但其仍受窗口大小范围的限制。G-MAP假定图像的概率分布函数服从Gamma分布,利用该先验信息对图像斑点噪声进行抑制[36]。该方法克服窗口的限制,但先验的Gamma分布对不同场景不具有稳健性。相比之下,由于SRAD滤波器采用各向异性扩散的滤波方式,不受滤波窗口的影响,而且通过结合一阶和二阶梯度算子来控制边缘两侧的扩散,可在滤波过程中有效保持边缘[37]。
传统SRAD不能自适应控制滤波迭代次数,当迭代次数过少降噪效果不佳,过多将平滑反差大的边缘[38]。由于水体边界为典型的高强度反差边缘,故本文在SRAD滤波的迭代过程中引入Beta度量[39](Beta metric,β)以自适应控制迭代次数,称为自适应SRAD(adaptive SRAD,ASRAD),其可在保持高强度反差边缘的同时最大限度地抑制斑点噪声。在降噪图像上,使用Wolf局部阈值算法取代常用KI和Otsu等全局阈值算法来进行河流水体粗提取[40],并由连通区域的面积和长宽比去除伪河流水体。考虑到高分SAR图像中易出现河流水体被跨河建筑物(例如桥梁和渡槽)遮挡的情况,使得提取结果出现许多间断,而完整的河流水体信息对进一步的水文模拟至关重要。针对此,本文设计一种多分辨率拓扑分析的间断连接方法。
1 研究方法
1.1 河流水体的SAR影像特征总结
影像目标特征是反映目标局部区域的光谱辐射特性与反映目标之间空间和几何关系的有机结合。为了更好地提取河流水体,必须了解其在高分SAR图像中的影像特征,由文献[41]的描述对其总结如下。
(1) 光谱特征:整体呈现暗色,内部光谱强度较均匀,与其相邻区域灰度反差较大。
(2) 几何形态特征:显示为弯曲的多边形,具有一定的长度,长宽比较大,宽度变化较小,方向变化较慢。
(3) 拓扑特征:具有连通性,相互间有间隙,不连续。
(4) 功能特征:通常与跨河建筑物(例如桥梁和渡槽)相伴随。
1.2 ASRAD斑点噪声滤波
设I={Ii,j,1≤i≤M,1≤j≤N}为原始SAR强度图像,其中,(i,j)表示像素位置;Ii,j∈{0,…,255}为(i,j)处像素的灰度值;M和N分别为图像的行和列数。对任一像素点(i,j),考虑其一阶邻域系统,利用前向差分来近似时间导数,可得SRAD模型的数值近似为

(1)

(2)
式中,∇和∇2分别表示梯度和拉普拉斯算子,c(q)定义为
(3)
qi,j为瞬时扩散系数,可通过以下公式计算
qi,j=
(4)
q0(ζ)为平滑尺度函数,可近似表示为
q0(ζ)≈q0exp(-ρζ)
(5)
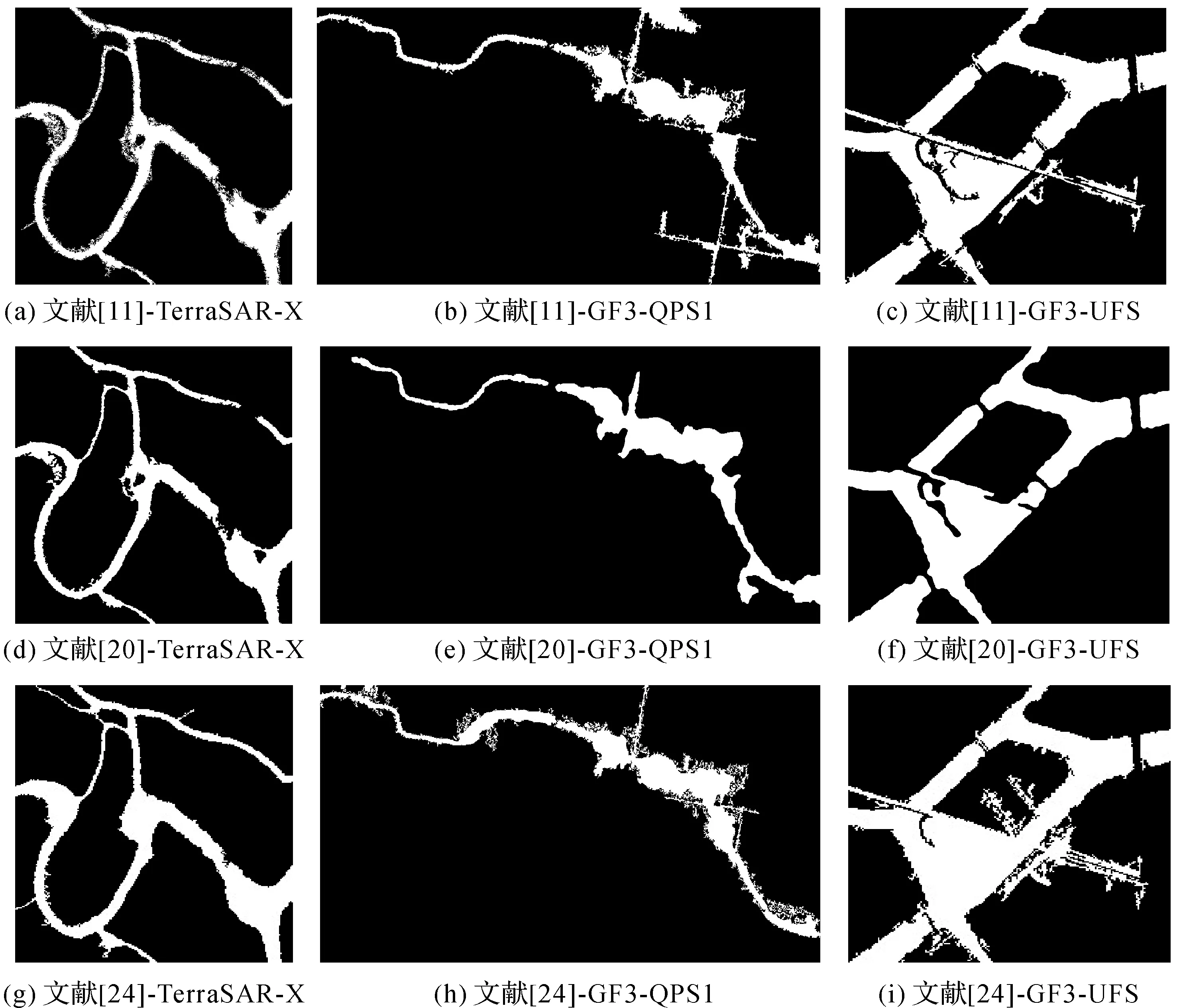
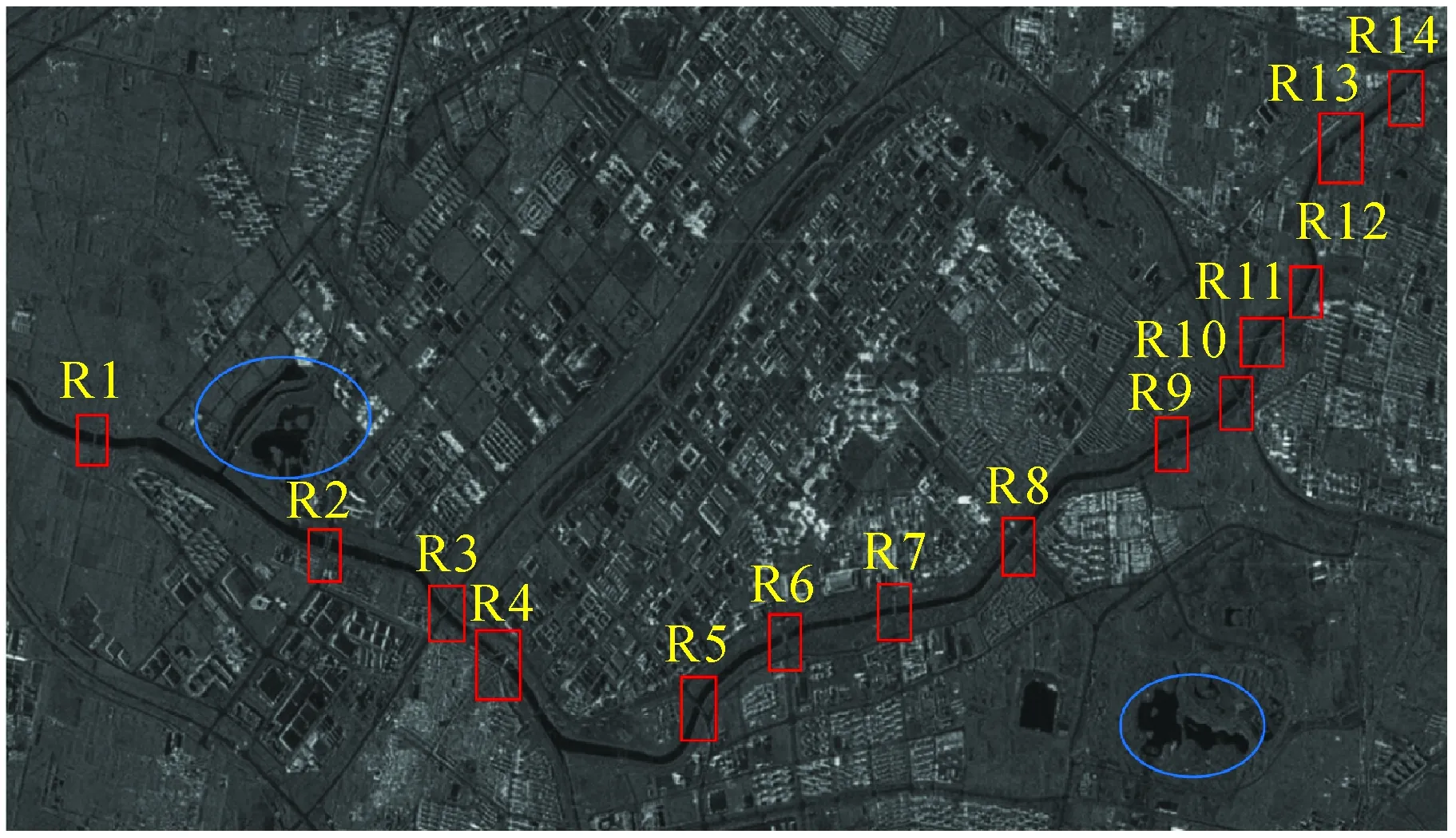
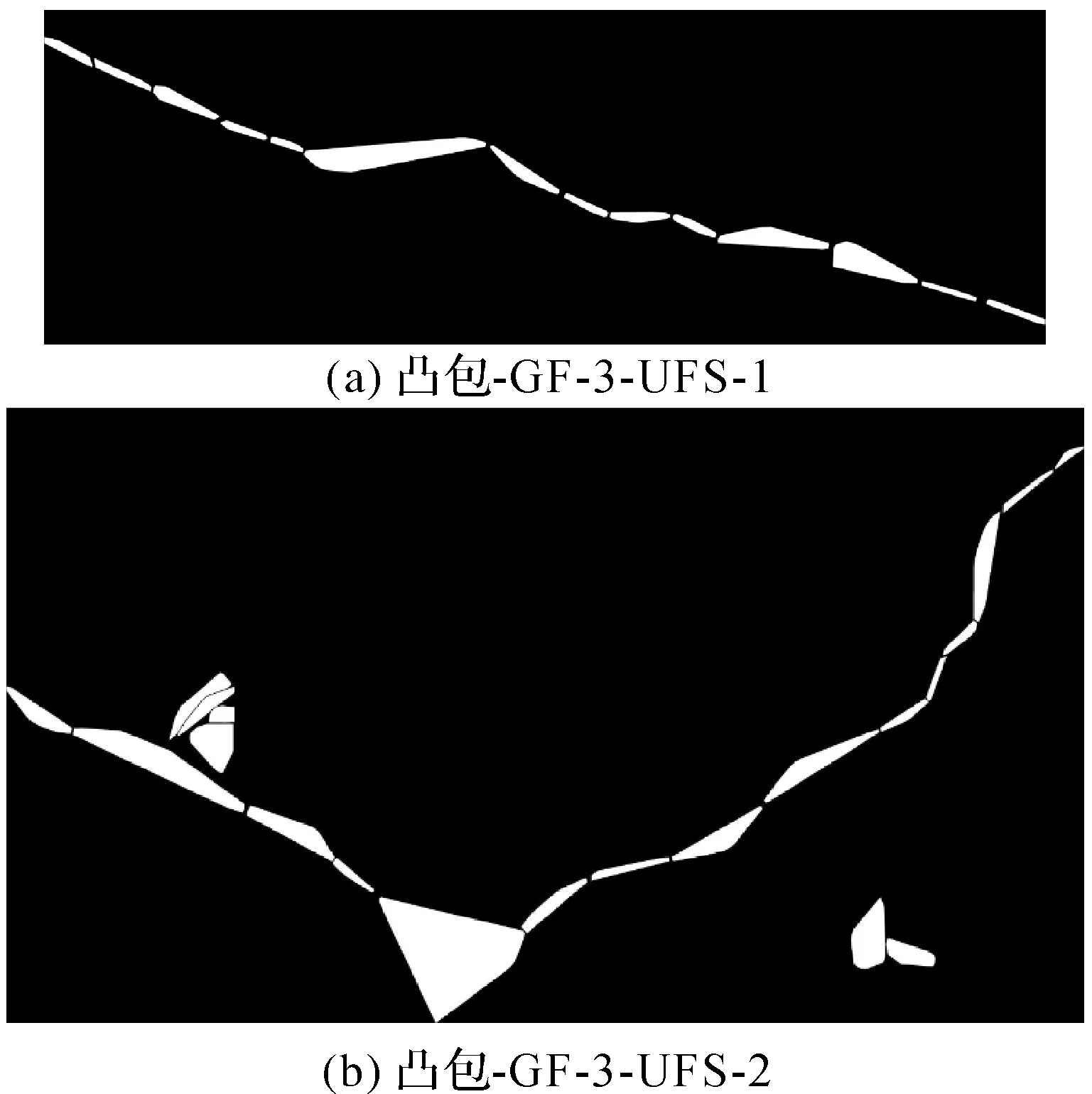
式中,ρ为降噪指数,其较大值可增强q0(ζ)的指数性,本文取ρ=1;0 在ASRAD中引入β指标作为定量标准来控制其迭代过程。β指标利用原始图像和滤波图像的边缘相似性来评价滤波过程中边缘的保存比率,即如果边缘在滤波过程中得到很好的保留,则β指标将接近于1,定义为 (6) |β(t)-β(1)|/β(1)≥ε (7) 式中,ε为控制迭代次数的阈值,ε越小,图像平滑度越大,信息损失越多,根据经验取ε=0.2时可得到较好保持高强度反差边缘的降噪图像。 1.3.1 河流水体段粗提取 基于水体在SAR图像中的光谱特征,可假设图像中只有水体和背景两类地物,同时考虑到F的局部不均匀性,利用Wolf局部阈值算法快速分割出河流水体区域。 对F内任一位置(i,j)的像素点,记以(i,j)为中心的滑动窗口大小为w×w,通过计算局部阈值Ti,j对该位置进行水体或背景判断 (8) 式中,Ei,j∈{0,1},当Ei,j=0时表示背景,Ei,j=1时表示水体;Ti,j是在以(i,j)为中心的w×w窗口内计算的局部阈值,可表示为 (9) 式中,κ∈[0.2,0.5]为控制窗口内阈值的经验可调参数,本文取κ=0.5;φ=min{Fi,j,1≤i≤M,1≤j≤N};δ=max{σi,j,1≤i≤M,1≤j≤N};μi,j和σi,j分别是以(i,j)为中心的w×w窗口内像素强度的均值和方差,可表示为 (10) (11) 遍历所有像素,得到河流水体的粗提取结果E={Ei,j,1≤i≤M,1≤j≤N}。 1.3.2 伪河流水体段去除 由于在F中河流水体与沥青路面、污水池等地物具有相似的光谱特征,使得E中存在一些零星的伪河流水体,为此根据2.1节的总结,设计精细化处理对其进行去除。首先搜索E中的连通区域,对其进行标识,统计每个标识块的面积Az及其外接最小矩形的长Lz和宽Wz,结合图像分辨率和工程实践的需要设定两个阈值,若其都在阈值区间,即 (Az>Ta)∩(Lz/Wz>Tr) (12) 图1 伪河流水体去除算法流程Fig.1 Flow chart of pseudo river waterbody removal algorithm 由河流水体在高分SAR图像中的拓扑特征和功能特征,在提取的河流水体段之间可能有一定距离。为了得到完整的河流水体提取结果,需将E′中间断的相邻河流水体段相连接。 1.4.1 河流水体段的最小凸包计算 考虑城镇和自然水域河流水体的几何形态特征,其具有蜿蜒曲折的自然形态,使得河流水体内部相邻曲折段与间断相似。为了避免河流水体内部相连接,本文以包络各个河流水体段的最小凸包作为连接对象。最小凸包[42]的计算流程如图2所示。 图2 凸包计算流程Fig.2 Flow chart of convex hull calculation 依次处理E′中的各个连通区域,得到对应的凸包集P={P(z),z=1,2,…,Z′},P(z)为E′中第z个河流水体段计算的凸包。 1.4.2 多分辨率拓扑分析的间断点定位 利用构建图像GP来获得在不同分辨率情况下河流水体拓扑结构的差异,从而自动定位河流水体段之间的间断点。 以P为输入,通过对其进行高斯平滑和子抽样来构建GP,可表示为 (13) 通过相邻GP层之间执行加法来获得连接金字塔(connection pyramid,CP),当k=K时 (14) 当k (15) 由上面对原始输入P以及GP的定义可知,构造的Ck中只存在0,1和2这3种像素强度值。由于原始输入P只有0和1两种像素强度值,其中等于1和0分别表示河流水体和背景,则可以做出以下分析。当Ck中任一位置(i,j)处的强度值为0时,表示相邻两层在此位置皆为背景,无须处理;当Ck中任一位置(i,j)处的强度值为2时,表示相邻两层在此位置皆为河流水体,无须处理;当Ck中任一位置(i,j)处的强度值为1时,由高斯金字塔的定义可知下层和上层在此位置的值分别为0和1,表示下层和上层分别为河流水体和背景,则此位置可能位于河流水体段之间的间断,即需处理的点。通过遍历Ck,k∈{1,2,…,K},可自动获得每层可能属于间断的像素点。 1.4.3 间断点生长的河流水体段连接 对所有可能的间断像素点,以其为种子点,采用区域生长策略对其真实属性进行判别分类,以此来实现河流水体段之间间断的连接。 随着k增大,Gk的分辨率逐步降低,间断也越窄,因此从CP的上层到下层搜索河道间隙的半径应逐步增大。由Ck的构造过程,可知任一种子点在其中的最大搜索半径可表示为 Rk=SK-k+1 (16) 其中,S为构造GP的采样步长。 图3 S=2,k=1的种子的搜索方向和半径Fig.3 Search directions and radius for seeds with S=2, k=1 通过MATLAB R2018b编写程序进行提取试验,试验运行环境为Windows10 32位专业版操作系统,处理器为Intel(R)Core(TM)CPU 32 G的个人计算机。 为了验证提出方法的可行性,对从中景视图和自然资源卫星影像云服务平台获取的多幅SAR影像数据进行测试,选取其中具有不同类型河流水体的3幅图像进行展示和分析,如图4所示。图4(a)是分辨率为3 m、HH极化、大小为700×620像素的TerraSAR-X强度图像,由图中可以看出其中没有建筑遮挡所导致的间断,用其结果来说明本文凸包处理机制的兼容性。图4(b)是分辨率8 m、HH/HV极化、大小为540×1240像素的GF3-QPS1强度图像,由图中可以看出河流水体呈东西走向且被跨河建筑物分为大小不一的部分,用其结果来说明本文根据河流连通特性进行伪河流水体去除的必要性;图4(c)是分辨率3 m、HH/VV极化、大小为880×900像素的GF3-UFS强度图像,其为典型的城镇人工改造河流水体,具有大量跨河建筑物,用其结果说明提出方法的有效性。 图4 原始SAR强度图像Fig.4 Original SAR intensity images 为了说明本文ASRAD滤波方法的优势,利用G-MAP、AR-Lee和SRAD滤波器作为滤波对比算法,对降噪结果进行定性评价和由均方误差(mean-square error,MSE),信噪比(signal-to-noise ratio,SNR),峰值信噪比(peak signal-to-noise ratio,PSNR)和式(6)的β度量组成的定量评价。 为了验证本文预降噪和多分辨率拓扑分析的必要性,选取文献[11]的KI法、文献[20]的LRACM法和文献[24]的ROEWA-LS法作为提取对比算法,其中用KI法来说明使用Wolf的原因;用ROEWA-LS来验证ASRAD的优势;用KI、LRACM和ROEWA-LS法来表明多分辨率拓扑分析的必要性。为了更客观评价各方法,对提取结果利用本文1.3.2节的伪河流水体去除法进行后处理,对提取结果的定量评价选用基于目标边界信息的评价标准。 为了验证提出方法的稳健性,在GF-3卫星上获取的SAR图像上选取多幅较大尺度的城镇河流水体场景图像,限于篇幅,选择具有最大尺度的两幅图像进行展示和分析,其分辨率为3 m、超精细条带成像模式、大小分别为2000×6000像素和4400×7700像素。 为了说明本文ASRAD滤波方法的优势,利用G-MAP、AR-Lee和SRAD作为滤波对比算法对图4进行处理,结果如图5所示,其中图5(a)—(c)、图5(d)—(f)、图5(g)—(i)和图5(j)—(l)分别为G-MAP、AR-Lee、SRAD和ASRAD滤波的结果。 图5 斑点滤波结果对比Fig.5 Comparison of speckle filtering results 由图5的对比可以看出,G-MAP滤波法对斑点噪声有一定的抑制作用,但对不同场景的滤波效果不一致。AR-Lee法由于能够根据边缘检测信息和邻域相干性高低程度调整滑动窗口大小,在斑点噪声抑制和边缘信息保持方面都得到了提高,但在如图5(b)中的非水体区域仍存在大量的杂散点,这严重影响后续处理。SRAD法对同质区域内部噪声取得较好的抑制作用,但在固定滤波迭代次数下,如图5(g)中的一些弱强度河流水体边界被破坏,相比之下,ASRAD自适应地调节滤波次数,可在最大限度降噪的同时保持水陆边界信息,有助于河流水体的更精确提取。对于滤波结果的定量评价,选取MSE,SNR,PSNR和式(6)的β度量。MSE值越低,表示降噪图像越接近原始图像,算法具有更好的性能,SNR和PSNR反映真实与估计图像误差之间的关系,其值越大表示效果越好。各评价指标见表1,由表中可以看出,ASRAD法具有较小的MSE值,较大的SNR和PSNR值,说明它能较好地滤除噪声,且具有较大的β值,说明在滤除噪声的同时也能有效地保持边缘。 表1 滤波结果的定量评价Tab.1 Quantitative evaluation on filtering results 利用Wolf局部阈值分割算法对滤波后的图像进行河流水体段粗提取,结果如图6(a)—(c)所示。由于存在同谱异质现象,使得粗提取结果中存在一些零星的伪河流水体,为此使用连通区域标识法对其精细化处理,结果如图6(d)—(f)所示。 图6 河流水体提取结果Fig.6 Extraction results of river waterbody 由图6(d)—(f)可以看出,零星的伪河流水体段在面积和外接矩形长宽比的双重约束下被较好地去除,但在图6(e)和6(f)中存在许多将河流水体一分为二的间断,这是由于在高分SAR图像中河流水体被一些跨河建筑物(例如桥梁和渡槽)所遮挡。由于完整的河流水体信息对进一步的水文模拟至关重要,因此需对这些间断进一步处理。 为了更清晰展示基于多分辨率拓扑分析的河流水体段连接过程,选取图6(f)中一个256×256像素的矩形区域(见图6(f)的红色矩形框),如图7(a)所示。首先计算包络河流水体段的外接最小凸包,如图7(b)所示,由图中可以看出凸包可有效地将河流内凹区域包含其中,从而避免河流内部被连接。以凸包为基,使用2像素采样步长构造四层的高斯金字塔,如图7(c)所示,其中从下至上各层大小分别为128×128、64×64、32×32和16×16像素。由多分辨率拓扑分析来定位金字塔各层的间断种子点,如图7(d)内的绿色部分所示。由区域生长策略逐层地对间断点进行判别,实现相邻河流水体段的自动连接,结果如图7(e)所示。 图7 多分辨率拓扑分析的间断连接流程Fig.7 Discontinuous connection flow based on multi resolution topology analysis 对图6(d)—(f)分别按上面流程进行处理,其中构造的最小凸包如图8(a)—(c)所示。以最小凸包为连接对象构建GP(图6(d)和(e)的S=2,K=2,图6(f)的S=2,K=4)进行多分辨率拓扑分析,由拓扑传递将间断信息逐层地相结合,实现河流水体的完整提取,如图8(d)—(f)所示。为了在视觉上进行定性评价,将提取的河流水体像素表示为红色,并叠加在原始图像上,如图8(g)—(i)所示。从凸包的构造可以看出,凸多边形可准确包络河流水体段且对无间断场景仍有效,如图8(a)中只得到一个凸多边形。从结果可以看出,河流水体被完整地提取,且提取结果边界与实际河流边界可较好地吻合。 对于定量评价,采用文献[43]提出的一种SAR图像目标边界信息评价标准,以手工勾画的河流水体边界线为标准数据,以其为中心,建立4个像素半径的评价区域,计算提取结果的边界落入不同半径评价区域的累加百分比,可表示为 (17) 式中,|·|表示集合的基数;v为评价区域的半径索引;V为评价半径大小;bufv表示半径为v的评价区域;bor为试验所得边界,当v=0时,buf为标准的边界线;UV为V内重叠累加百分比。精度评价结果见表2,由表中可以看出,本文方法的各图像约34%的提取边界线位于手工勾画的边界线上,当评价区域半径达到3个像素时,准确率均提高到90%以上,表明本文方法提取的准确性。 对比算法的河流水体提取结果如图9所示,其中,图9(a)—(c)、图(d)—(f)和图(g)—(i)分别为文献[11]、文献[20]和文献[24]法所提取结果。 由图9和图8(d)—(f)对比可以看出,文献[11]的KI法阈值提取效果低于本文的Wolf法,这是由于Wolf法采用局部阈值,可较好地适用于滤波后图像的亮度不均性。文献[20]的LRACM法虽能实现河流水体的提取,但部分河流水体与相邻区域连接,这会严重影响后续的处理。文献[24]的ROEWA-LS法由于采用多尺度处理策略,可忽略较小距离的间断,但不能处理较大距离的间断(如图9(i)所示)。相比之下,提出方法首先在ASRAD滤波图像上利用局部阈值分割,在保证河流水体段的高精度提取的基础上通过多分辨率拓扑分析对河流水体段之间的间断进行自动连接,从而达到有效提取完整河流水体的效果。对于对比算法的定量评价,同样基于邻域像素的评价标准建立半径为4个像素的评价区域,计算其对应方法所提取的河流水体边界线落入不同半径评价区域的累加百分比,其结果见表2。 图8 本文方法的提取结果与定性评价Fig.8 The extraction results and qualitative evaluation of the proposed method 图9 对比算法的提取结果Fig.9 Extraction results of comparison algorithms 表2 提取结果的边界精度Tab.2 Boundary accuracy of extraction results (%) 通过表2中各方法的对比可以看出,当标准与提取边界完全重叠时,文献[11]、文献[20]、文献[24]和本文方法的平均提取精度分别为24.09%、33.23%、32.46%和34.25%,考虑到标准边界线的偏差,本文方法与对比算法的提取精度相差不大,当达到2个像素半径时,文献[11]、文献[20]、文献[24]的平均提取精度分别为65.58%、67.71%和71.76%,而提出方法均已达到80%以上,说明提出方法具有较高的准确性。随着评价半径增大,文献[11]法精度提高有限,而本文方法提取精度始终大于文献[20]和文献[24]的方法且其优越性更加显著。 选取进行展示和分析的两幅大尺度图像如图10、图11所示,其中,图10和图11分别有15个和16个跨河建筑物,且河流水体由于受到自然和人为的共同作用,具有复杂的几何形态和背景,这增加了河流水体提取的难度。 图10 原始GF-3-UFS-1图像Fig.10 Original GF-3-UFS-1 image 为了便于分析,将图10、图11内的跨河建筑物进行标记,如图10中的红色矩形框R1-R13,其中R2和R13内各有两个,图11中的红色矩形框R1-R14,其中R4和R13内各有两个。对图10、图11由提出方法的滤波、阈值分割和伪河流水体去除这3个步骤进行处理,结果如图12(a)和12(b)所示。 图11 原始GF-3-UFS-2图像Fig.11 Original GF-3-UFS-2 image 图12 河流水体段提取结果Fig.12 Extraction results of river waterbody segments 由图12中可以看出,各河流水体段在整体上得到了较好提取,但为了去除伪河流水体(如图10、图11的蓝色椭圆框内),使得一些较小河流水体段被误去除,而如图11的蓝色椭圆框内的伪河流水体被保留。对于被误去除的河流水体段,可通过间断连接进行修复,而被保留的伪河流水体,本文在间断连接后通过设置较大面积对其进行去除。 分别对图12(a)和图12(b)中的连通区域进行凸包计算,结果如图13(a)和图13(b)所示。 由图13可以看出,计算的外接凸边形可有效避免将河流水体段内部弯曲部分误判为间断(如图12红色椭圆框内)。以各个凸边形为连接对象,由提出的间断连接和伪河流水体去除方法对其进行处理,并将得到的最终提取结果表示为绿色,叠加在原图上,结果如图14所示。 图13 河流水体段的凸包Fig.13 Convex hull of each river waterbody segment 图14 河流水体提取和叠加结果Fig.14 River waterbody extraction and superposition results 由结果的叠加可以看出,通过将河流水体段连接为一个整体后可有效地去除被保留的伪河流水体,得到的最终提取河流水体在完整性和边界定位方面具有良好的视觉精度。各图像的定量评价见表3。 由表3和表2的对比可以看出,两幅大尺度图像的提取精度小尺度图像在标准边界和1个像素的评价半径时较低,但随着评价半径增加,两幅大尺度图像与小尺度图像的提取精度相当,在3个像素评价半径时均已达到了90%以上。由不同场景和不同尺度下提取结果的定性和定量评价验证了提出方法的可行性和稳健性。 表3 大尺度图像提取结果的边界精度Tab.3 Boundary accuracy of large-scale image extraction results (%) 本文提出了一种基于斑点抑制和多分辨率拓扑分析的高分辨率SAR图像河流水体提取方法。该方法主要针对斑点噪声和建筑遮挡所导致提取存在准确性和完整性降低的问题,提出了包括降噪、阈值粗提取、伪河流水体去除和间断连接的4步处理方法。为了在降噪的同时保持河流水体的边界信息,在SRAD中引入Beta度量以自适应地控制滤波迭代。在降噪图像上采用Wolf局部阈值算法快速对其进行分割并由连通区域标识进行伪河流水体去除。间断连接中以包络河流水体段的最小凸多边形为连接对象构建高斯金字塔,从而获得在不同分辨率图像中应与河流水体段相连接的间断信息,由区域生长策略实现各河流水体段的逐步逼近,最终完成河流水体的完整提取。 本文方法通过斑点抑制和多分辨拓扑分析,可有效解决斑点噪声和建筑遮挡所引起的准确性和完整性问题,可为具有大量建筑遮挡的城镇河流水体提取提供一个较好的解决方案。但对于其他场景,如地形起伏较大的地区,由于水体与山体阴影的强度值相似,这些阴影若与真实水体相连通,无疑会对后续的处理造成不可逆的错误。为此,在未来研究中将考虑纹理、地形、和雷达入射角等因素,使得改进方法更具普适性。
1.3 滤波后图像河流水体段提取


1.4 多分辨率拓扑分析的河流水体段自动连接







2 试验结果与分析
2.1 试验设置
2.2 ASRAD滤波结果与分析


2.3 滤波图像河流水体段提取结果与分析

2.4 多分辨率拓扑分析的河流水体段连接结果与分析

2.5 对比算法提取结果与分析


2.6 本文方法稳健性分析




3 结 论
猜你喜欢
农业工程学报(2022年10期)2022-08-22舰船电子工程(2022年6期)2022-08-02建材发展导向(2022年2期)2022-03-08建材发展导向(2022年2期)2022-03-08重庆大学学报(2022年2期)2022-02-28建材发展导向(2021年19期)2021-12-06计算机仿真(2021年6期)2021-11-17智能计算机与应用(2020年4期)2020-08-31投资北京(2018年10期)2018-12-29计算机应用(2016年10期)2017-05-12
