
无人机集群规避动态障碍物的分布式队形控制
2022-02-23 08:31:38符小卫
系统工程与电子技术 2022年2期
符小卫, 潘 静
(1. 西北工业大学电子信息学院, 陕西 西安 710129; 2. 西安现代控制技术研究所, 陕西 西安 710065)
0 引 言
在作战过程中,无人机集群通常需要形成某一特定队形去执行特定类型的任务并在飞行过程中保持队形的稳定。同时,也要求集群在飞行途中如果遇到外界环境的突然变化能够及时调整队形来保证飞行的安全。可以说,无人机集群的队形控制是无人机集群作战的重要基础。但在飞行过程中集群有可能会遇到动态障碍物,如飞行的鸟群、恶劣气象涡流等。在有效规避动态障碍的同时保持集群队形的稳定是无人机集群安全性能和生存能力的必要保证。集群探测到动态障碍物的存在后,需要及时根据探测到的障碍物的信息改变集群队形并对障碍物进行规避,避障结束后再进行队形的重构。因此,如何实现躲避动态障碍物下的队形保持与重构对于研究无人机集群队形控制问题是至关重要的。
目前无人机集群的队形控制方法主要有领导-跟随法、虚拟结构法以及行为控制法。领导-跟随法中,领导者根据预设的轨迹飞行,追随者跟随领导者飞行并和领导者保持特定的几何距离,虽然简单实用,但系统的鲁棒性较差,一旦领导者失效将导致集群队形的失败。虚拟结构法中,集群把队形的整个结构视为一个刚体,刚体中存在一个虚拟中心点作为集群的领导者,无人机通过和虚拟中心保持特定的几何位置关系来形成和保持期望队形。虽然系统的鲁棒性有所提高,但却以高通信量和高计算能力为代价,并不适用于大规模无人机集群的队形控制。行为控制法是一种通过个体无人机遵循相对简单的规则来实现整体集群行为的分布式队形控制方法,将无人机集群队形控制的整个过程划分为几个基本控制行为,从而实现各架无人机之间合作或竞争的关系。基于一致性理论的无人机集群的队形控制方法则通过选择合适的能够达成一致的状态变量实现集群的队形形成与变换,能够有效降低通信负担,从而实现大规模无人机的集群,系统鲁棒性更高,但集群只能沿着预定航向行进,不能实现对障碍物的规避。Khatib通过在智能体之间和智能体与障碍物之间构造虚拟力场来实现智能体的避障。在此基础上,Olfati等通过人工势函数和速度一致性的结合实现了智能体的集群控制,通过在静态障碍物的表面构造一个虚拟智能体与多智能体之间产生排斥力来达到避障的效果,但群体在避障时只能保持晶体结构而不能形成特定队形,并且对所有探测到的障碍物都将采取避障措施。伍友利等研究了无人机集群在三维空间中规避静态障碍物的避障控制方法。张超省等研究了地面战场中机器人集群执行任务时的避障问题。杜婉茹等研究了针对未知且障碍形态多样的战场环境,智能体在二维空间躲避动态、静态障碍物,追踪目标的路径规划方法。Yang等通过判断动态障碍物和智能体之间的当前相对距离是否小于设定的安全阈值来给智能体施加排斥力,没有对智能体是否会与动态障碍物发生碰撞做出预判断,当二者距离小于安全阈值时可能并不会发生碰撞却采取了规避措施,从而增加智能体因避障而绕行的路程。
因此,本文首先引入针对动态障碍物的碰撞预判机制,对探测到的动态障碍物进行是否需要对其进行规避的判断,然后在无人机与动态障碍物之间构造斥力场实现避障,最后在一致性算法的基础上结合人工势场法实现动态避障下集群队形的控制。
1 问题描述
本文以无人机集群飞行控制为研究背景,飞行控制的目的是实现集群在躲避动态障碍物下的队形变换与保持。给定架在三维空间飞行的无人机共同构成一个无人机集群,集群中的单架无人机的二阶运动模型可表示为
(1)
式中:()=[(),(),()]代表无人机在时刻的位置向量;()=[(),(),()]代表无人机在时刻的速度向量;()=[(),(),()]代表无人机在时刻的控制输入;=1,2,…,,代表集群中无人机的数量。
同时,还需要考虑如下约束条件:
(1) 无人机的速度约束
由于自身性能的限制,无人机会有一个最大速度。只有无人机的速度大小在此范围内才能保证无人机的安全飞行。也就是说,|()|≤。
(2) 无人机的加速度约束
无人机在接收到指令后无法立即更改其速度大小和方向。因此,无人机的加速度限制应满足|()|≤。
(3) 无人机的通信距离约束
假设无人机的通讯范围是。无人机间的通信拓扑关系可用无向图=(,)表示。其中,={1,2,…,}表示集群无人机的节点集合,={(,)|,∈,≠}表示集群无人机之间的通信边集,=[]表示集群无人机通信拓扑图的邻接矩阵,当(,)∈时,=1,说明两架无人机之间可以进行通信;反之,=0,二者之间无法进行信息交互。
无人机集群中存在一个虚拟领导者。设定虚拟领导者为集群的几何参考点,假设虚拟领导者在时刻的位置向量为(),速度向量为(),无人机相对于集群几何参考点的位置向量为。当队形形成时,各架无人机与虚拟领导者将达到并保持期望距离,集群中的各无人机速度最终趋于一致,即
(2)
以圆形队形为例,队形稳定时的示意图如图1所示。无人机集群在队形变换的过程中,只需根据需变换的期望队形改变集群各无人机与几何参考点的相对向量即可实现队形变换。

图1 圆形集无人机群队形稳定状态Fig.1 Circle formation in steady state of UAV swarm
2 规避动态障碍物的队形控制
2.1 求解思路
针对躲避动态障碍物下集群队形的控制问题,本文在设计算法时,首先加入障碍预判机制,在探测到动态障碍物时只对预测到可能发生碰撞的障碍物进行规避,而不考虑不会发生碰撞的障碍物的影响,避免集群因躲避不会发生碰撞的障碍物而偏离预定航向,从而减少集群因避障而绕行的路程。然后,在无人机之间和无人机与障碍物之间引入虚拟力的机制。无人机之间存在引力场和斥力场,而无人机和障碍物之间只存在斥力场,从而实现无人机集群在动态避障下的队形保持与重构。
2.2 集群队形设计
221 圆形集群队形
在圆形队形中,虚拟领导者处于圆心位置,其余无人机均匀地在圆周上排列开来。
三维空间下的圆形队形中,各无人机距离虚拟几何参考点的相对位置向量可根据该圆计算得出,计算方法如下:
(3)
=(sin(360),cos(360),0),=1,2,…,
(4)
式中:为该圆的半径;为无人机之间的期望距离;为无人机的数量。
222 V字形集群队形
在V字形队形中,V字形队形的顶角为(0<<π),虚拟领导者处于顶点位置。
三维空间下的V字形队形中,各无人机距离虚拟几何参考点的相对位置向量的计算方法为
=(0,0,0)
(5)
=(-cos(2),sin(2),0),
=2,…,(+1)2
(6)
=(-cos(2),-cos(2),0),
=(+1)2+1,…,
(7)
式中:为无人机之间的期望距离;为无人机的数量。
223 一字形集群队形
在一字形队形中,虚拟领导者处于一字形的顶点,其余无人机呈一字形按顺序向后排列。
三维空间下的一字形队形中,各无人机距离虚拟几何参考点的相对位置向量的计算方法为
=(0,0,0)
(8)
=(-·,0,0),=2,…,
(9)
式中:为无人机之间的期望距离;为无人机的数量。
2.3 障碍预判机制
无人机集群飞行过程中可能遇到鸟群等动态障碍,为了提高无人机集群飞行安全性,可把鸟群外包络处理成具有一定半径的球形障碍物。这样可以通过改变球形半径,在避撞飞行的安全性和路径的长度之间进行合理折中。
躲避动态障碍物下的障碍预判机制需考虑动态障碍物的自身速度对预判过程的影响,通过引入无人机与动态障碍物之间的相对速度和相对位置这两者信息来共同判断无人机与障碍物之间是否有发生碰撞的可能。动态障碍物的碰撞预判机制具体如图2所示。
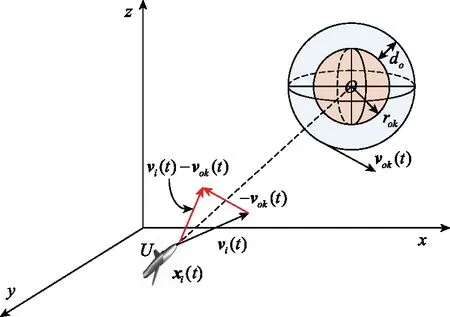
图2 无人机与动态障碍物之间的碰撞预判Fig.2 Collision prediction between UAV and dynamic obstacle
为了提高无人机集群飞行假设空间中存在一个动态球形障碍物,考虑无人机在时刻下能检测到该障碍物,此时无人机的位置向量为(),速度向量为(),障碍物球心的位置向量为 (),速度向量为 (),半径为 ,无人机与该动态障碍物之间的期望安全距离为。通过计算动态障碍物和无人机二者的相对速度在它们相对位置向量上的投影()来判断二者的碰撞是否会发生,具体计算方法如下:

(10)
式中:是从无人机到动态障碍物圆心的相对位置向量的单位向量。若()≤0,则说明无人机在时刻是朝着远离障碍物的方向运动,此时不会发生碰撞,不用采取避障行为;若()>0,则说明无人机在时刻是朝着靠近障碍物的方向运动,可能会发生碰撞。由于无人机和障碍物的运动轨迹不能提前预知,假设无人机和障碍物仍按照当前速度方向和大小继续运动,计算它们继续运动直到二者距离最近的时刻Δ,具体计算方法如下:

(11)
Δ的具体计算方法如下:
(12)
根据Δ,可以进一步计算出无人机和障碍物球心之间的最近距离,即

(13)
如果这个最近距离(+Δ)小于动态障碍物的半径 和期望安全距离的和,即
(+Δ)≤ +
(14)
则说明无人机和障碍物若保持当前状态继续运动将会发生碰撞,无人机需对该障碍物采取避障行为。
2.4 无人机间的人工势能函数
定义为一种新的范数,来代替欧式范数计算无人机之间的距离。欧式范数在=0处是不可导的,而范数在各处可微,可以用于构造光滑的势能函数。具体定义如下:

(15)
式中:>0。范数梯度的计算方法如下:
(16)

(17)
()=()(-)
(18)

(19)
(20)

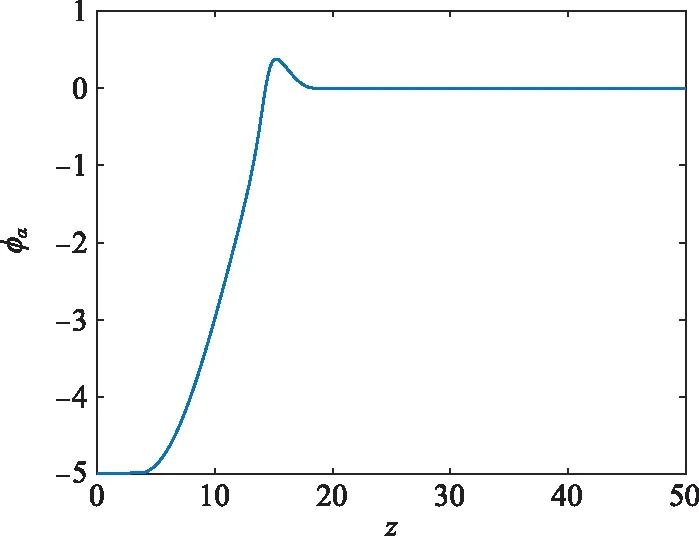
图3 φα(z)函数的变化趋势Fig.3 Change trend of φα(z) function
()为0到1上连续光滑的碰撞函数:
(21)
式中:用于确定空间邻域中受力场影响最大的区域。在区域(0,)中,()=1,这时无人机受到动作函数()的影响最大。在该区域外,()从1递减到0,()的影响也相应地递减到0。越接近于1,则无人机受邻域内无人机的影响越大。
2.5 动态障碍物的人工势能函数
当无人机在时刻判断出自身和动态障碍物在Δ时间后将发生碰撞,这时需要利用其最大加速度-进行降速使得无人机与障碍物的相对速度()迅速降为零。这一过程中,无人机运动的距离(())计算如下:

(22)
同时,计算时刻无人机与障碍物之间的最短距离((), ()),即

(23)
(24)
具体计算方法如下:
()=()((-)-1)
(25)

因此,无人机与动态障碍物之间的人工势能函数设计如下:

(26)
通过计算无人机距离障碍物的最短距离和降速所需距离的差来体现所需排斥力的大小,这个距离差越小,则所需排斥力越大。
2.6 集群协同控制律
本文假设集群中存在一个虚拟领导者在给定的预设轨迹上飞行,虚拟领导者的位置信息和速度信息不受集群中其他无人机信息交互的影响。集群中所有无人机都具有探测障碍物的能力,并可获取虚拟领导者的位置信息与速度信息。根据期望队形的不同,各无人机与几何参考点的相对向量由一致性包算法(consensus-based bundle algorithm, CBBA)分配得出,具体过程参考文献[31]。基于一致性的队形保持与重构控制律如下:
=+++
(27)
式中:为虚拟领导者的加速度;为无人机与邻域内无人机之间的吸引力与排斥力,当无人机之间的距离小于队形期望距离时,表现为斥力,且随的减少而增大;当无人机之间的距离大于期望距离时,表现为引力,且随的增大而减少;为动态障碍物与无人机间的排斥力,无人机越接近障碍物,排斥力越大;为无人机集群的队形保持控制。
各项的具体表达式如下:

(28)

(29)


(30)
无人机与动态障碍物的人工势能函数定义为

(31)
式中:(())是关于位置和速度的函数;是由人工势能函数分别对其位置和速度求偏导得到的,其中是控制参数,取正常数,即

(32)
其中

(33)
代表无人机的障碍物邻域,表示所有障碍物的集合。的具体定义为
={(+Δ)≤ +|∈}
(34)
3 仿真结果与分析
仿真设定三维空间中有7架无人机进行集群飞行且在行进途中存在动态障碍物。单架无人机的最大飞行速度=60 m/s,最大加速度=10 m/s。每架无人机的初始速度在[0,30]m/s×[0,30]m/s×[0,30]m/s中随机产生,初始位置在[0,300]m×[0,300]m×[0,300]m中随机产生。无人机集群中,相邻无人机之间的期望距离为150 m,各无人机的通信半径=300 m。集群中存在一个虚拟领导者,虚拟领导者的初始位置(0)=(150 m,150 m,150 m),初始速度(0)=(20 m/s,20 m/s,10 m/s),加速度=0。空间中存在3个动态障碍物,障碍物1初始位置球心 (0)=(1 200 m,1 750 m,600 m),初始速度 (0)=(0 m/s,-3 m/s,-4 m/s),半径为120 m并保持匀速运动,障碍物2初始位置球心为 (0)=(1 700 m,1 500 m,500 m),初始速度 (0)=(-1 m/s,0 m/s,5 m/s),半径为200 m并保持匀速运动,障碍物3初始位置球心 (0)=(2 000 m,1 500 m,900 m),初始速度 (0)=(-3 m/s,-3 m/s,0 m/s),半径为100 m并保持匀速运动。无人机与障碍物之间的期望安全距离=200 m。集群协同控制律的具体参数设置如下:=1,=5,=01,=02,=1,=25,==05,=1,=2,仿真步长设置为002 s。无障碍物下的无人机集群飞行时的期望队形为圆形,避障时的集群期望队形为一字形,避障后的集群期望队形为顶角为60°的V字形队形。整个集群飞行过程具体的仿真结果如图4所示。

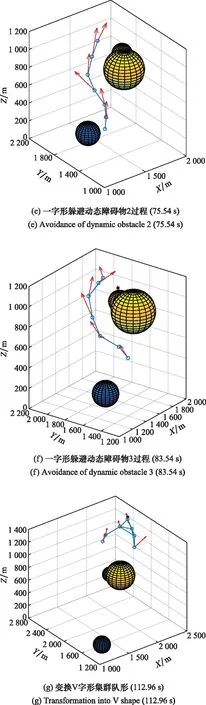
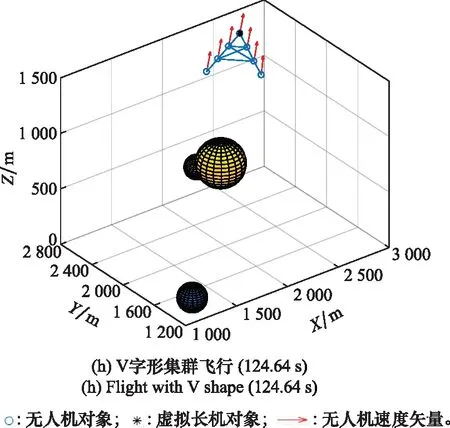
图4 三维空间下无人机集群飞行全过程Fig.4 Whole process of UAV swarm flight in three-dimension space
从图4(a)~图4(f)的动态仿真结果可以看出,无人机集群能够形成期望圆形队形飞行。当探测到动态障碍物1后,集群检测到不会与其发生碰撞,因此不采取避障措施。当探测到动态障碍物2和动态障碍物3后,集群检测到会与其发生碰撞,因此变换为一字形集群队形进行避障,并在成功躲避动态障碍物后进行队形的重构,变换为V字形集群队形保持飞行。
图5描述了无人机集群飞行过程中的速度误差与位置误差的变化过程。图5(a)表示的是各时刻集群中所有无人机的平均速度(轴、轴及轴)与虚拟领导者之间的速度误差。图5(b)表示的是各时刻集群中所有无人机距离虚拟领导者的实际相对距离(轴、轴及轴)与期望相对距离的位置误差。可以看出,集群在经过队形变换与避障一系列动作后,最终与虚拟领导者的速度保持一致,达到集群的期望速度。同时,各架无人机与虚拟领导者之间达到了期望的相对距离,能够保持期望集群队形稳定飞行。
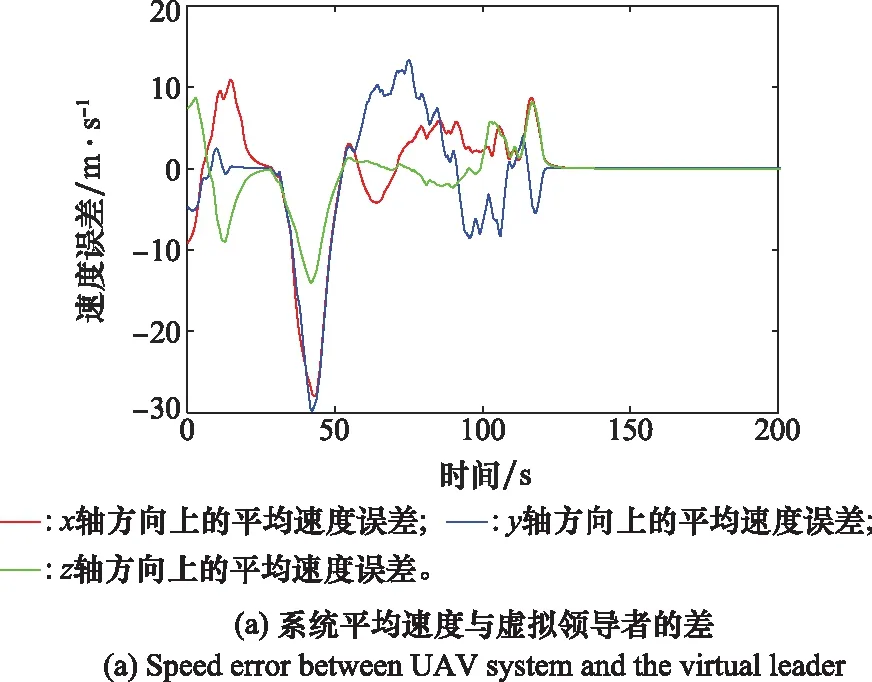
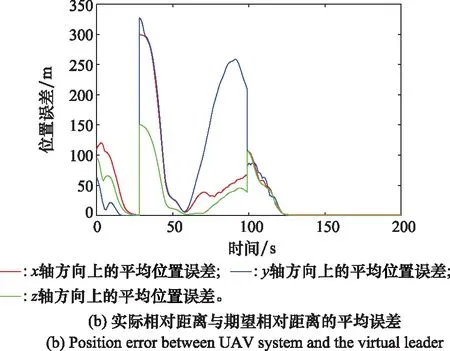
图5 无人机集群的速度误差与距离误差Fig.5 Speed error and distance error of the UAV swarm
图6是集群中单架无人机距离动态障碍物的最短距离变化图,描述了动态障碍物与每架无人机在每个时刻之间的最小距离(轴、轴及轴)。可以看出无人机集群与动态障碍物之间的最小距离始终大于0,并未发生碰撞。
图7和图8分别是集群飞行过程中各架无人机的加速度变化图和速度变化图。可以看出,在整个飞行过程中各架无人机的加速度和速度始终保持在约束范围内。
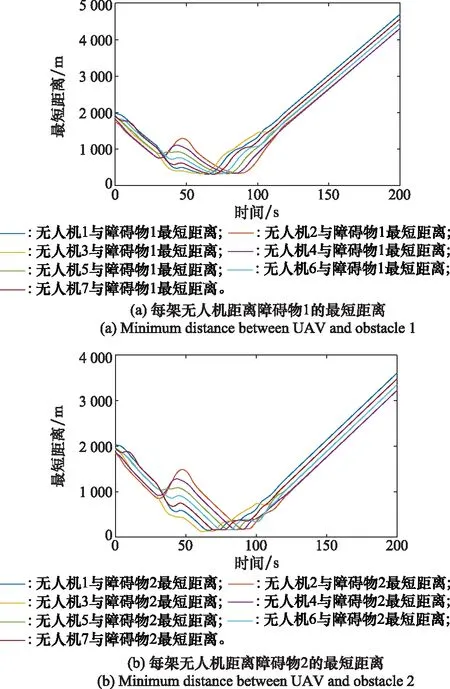
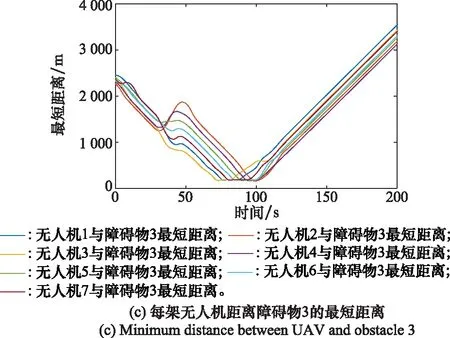
图6 集群中单架无人机与动态障碍物之间的最短距离Fig.6 Minimum distance between UAVs and obstacles

图7 集群中各架无人机的加速度变化图Fig.7 Acceleration change of the UAVs
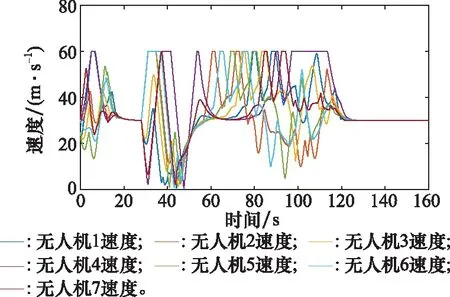
图8 集群中各架无人机的速度变化图Fig.8 Velocity change of the UAVs
根据图4~图8的描述与分析,可以看出本文设计的躲避动态障碍物下的无人机集群分布式队形控制方法是有效的。在该方法的控制下,无人机集群可以在躲避动态障碍物的同时保持集群一字形队形继续飞行,并在避障结束后实现集群队形的重构。
图9即为相同仿真环境下未引入预警机制的实际相对距离与期望相对距离平均误差。可以看出相较于图5(b),未引入预警机制的平均距离误差明显增大,即无人机进行了大量无效避障。其原因是本文提出的预警机制综合考虑了无人机与障碍物的位置、相对速度等因素,因此在判断相对速度无法造成相撞时不会进行避障,减少了不必要的规避航行距离,使得无人机能够更好地维持集群队形。
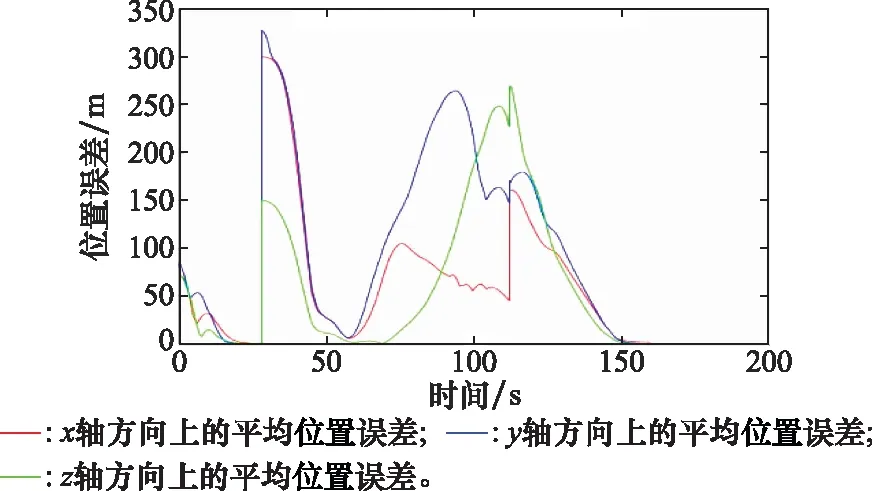
图9 未引入预警机制的实际相对距离与期望相对距离平均误差Fig.9 Average error between actual relative distance and expected relative distance without warning mechanism
4 结 论
本文主要研究了集群无人机动态避障下的分布式队形保持与重构控制方法。首先引入了一种针对动态障碍物的障碍预判机制,对预测到会发生碰撞的障碍物进行避障,而不考虑不会发生碰撞的障碍物对无人机集群飞行的影响,从而减少集群因避障而绕行的路程。其次,在无人机间和无人机与动态障碍物间构造虚拟力场实现动态避障。最后,结合一致性算法和人工势能法设计集群协同控制律实现集群动态避障下的分布式队形控制。下一步研究方向是研究集群协同控制律中各控制项权重系数的优化问题。
猜你喜欢
科学导报·学术(2020年26期)2020-10-21 11:18:54
动漫界·幼教365(中班)(2020年3期)2020-04-20 11:03:27
铁道通信信号(2020年9期)2020-02-06 09:15:54
作文大王·低年级(2019年6期)2019-08-01 01:44:02
三门峡职业技术学院学报(2019年4期)2019-05-20 09:38:20
汉字汉语研究(2019年4期)2019-03-04 09:52:28
小学生学习指导(低年级)(2018年5期)2018-04-24 03:03:27
小学阅读指南·低年级版(2016年5期)2016-05-14 13:24:44
西北工业大学学报(2015年1期)2016-01-19 03:29:50
城市道桥与防洪(2014年5期)2014-02-27 07:26:44
