
基于“0-FIS”理念的汽车总装自动化工艺研究和应用
2022-02-16 10:15费劲秦子铭刘德志冯骥龙张劲
汽车工艺与材料 2022年2期
费劲 秦子铭 刘德志 冯骥龙 张劲
(广汽本田汽车有限公司总装部,广州510700)
1 前言
某汽车公司总装共有4条整车生产线,均已结合当时最先进的制造工艺进行规划建设,其中3条已投产10年以上。该公司在2015年制定了中期产销规划,各年度计划销售台数均大于公司产能,为此,公司要求生产领域最大化生产,总装领域就必须具备更强体质应对超负荷生产需求。据统计,2015年该公司总装领域劳务费占据了日常运营成本的2/3,占比高,随着劳务费持续增长,生产成本不断上升,生产体质日益恶化。另一方面,企业生产线面临严重老旧化现象,而新车型不断导入,面向装配新工艺、新设备、新技术导入等要求,现场出现了越来越多的困扰,例如有效车位欠缺、物流面积不足等,这就要求对生产线进行改造,而既有生产线在空间、时间、工艺、设备等方面存在较多改造局限,制约了生产与发展。
如何既满足超产能高生产目标达成又实现生产线老旧化升级改造是总装领域面临的重大课题。基于此,结合汽车行业整体发展趋势及集团、公司未来发展规划,希望在不产生产量损失的前提下,结合自动化改造,采用机器换人削减人力成本,并通过工艺布局优化改善作业环境,提升工序保证能力,致力打造高效率、高品质、高集约的绿色总装工厂。可以说,推进总装自动化改造是整车制造从传统劳动密集型生产走向智能制造的必经之路。
2 总装自动化开展情况分析
调研分析结果表明,汽车企业总装车间的自动化率普遍在10%左右,甚至更低,而冲压、焊接、涂装等车间的自动化率大多都达到70%以上[1]。综合来看,各车企总装车间在自动化改造方面存在以下课题。
2.1 自动化改造影响经营目标达成
调研来看,行业总装车间自动化项目主要是停线改造,有2种情况。
a.第1种是在工厂产能过剩条件下,在完成计划产量后,通过生产线停线对应自动化升级改造。除了生产线适应性改造外,该方式与随新生产线建设而进行设备导入方式相比基本无差异。
b.第2种是基于要开展的自动化项目,通过预留工期改造的方式,在年度计划中预留相应日程,停线对应改造,通常会影响年度事业计划目标的制定。
以某汽车公司“十三五”中期销售规划来看,由于销量目标不断提升,到2020年将突破80万台,总装车间将一直处于高负荷生产状态(基础产能60万台/年)。在此背景下,常规自动化改造带来的集中停线、反复调试等课题必然会影响产品车产量,最终导致公司事业计划目标和经营目标无法达成。
2.2 自动化改造难度大
汽车制造企业总装车间生产过程是1项复杂的系统工程,涉及到诸多要素[2]。相比主要进行白车身加工的冲压、焊装、涂装等工艺,总装主要是进行车身零件的安装。不同零件的安装作业涵盖搬运、按压、紧固、扭力、涂抹、粘贴等80多种动作要素。在传统的总装装配作业中,人工作业占绝大部分,整体自动化程度低。在多车型批量共线生产模式下,要实现多车型、多规格零件的自动化安装,需要设备具备多车型通用性,实施难度大。
2.3 自动化改造降低生产柔性
“中国制造2025”明确将智能制造作为推进信息化与工业化深度融合战略任务的核心内容[3]。因此,基于汽车行业自动化、智能化发展大趋势,新工艺、新技术、新设备不断导入,总装车间必然要进行自动化、智能化升级改造。尽管人工智能技术日益发展,但与人工作业的灵活性对比还有较大差距。对于大规模装配制造行业来说,现有自动化技术不断导入后,汽车生产线柔性呈现不断降低趋势。总装车间零件品种多、规格多、变化点多,一旦某一自动化设备通用性不足,将很难满足可持续、高节拍的柔性化生产。因此,如何在既有环境下实现现场装配作业的自动化改造,同时保证可持续的柔性化生产是总装车间亟需解决的课题。
2.4 自动化改造环境制约因素多
就主机厂而言,老旧的低柔性化、低自动化的生产车间已不能满足现在全新平台车型的生产要求,需要建设全新的现代化总装装配线。然而新建生产线涉及新增大量投资,并不是大多数主机厂的首选,改造既有生产线是明智之举。随着整车装备不断增加,新技术、新工艺持续应用,不同于新建生产线时自动化设备导入的提前规划,既有生产线自动化设备导入必然会挤压现场在用车位,占用物流面积,打破原有稳定工艺结构。
因此,为满足新产品顺利导入,就需要在既有生产线基础上,确保自动化改造设备占用车位最小化、工艺集约化。
综上所述,如何在经营目标达成、设备通用性、空间、时间、工艺布局等限制条件下,在既有生产线基础上推进自动化改造,最大限度满足正常生产需求是汽车行业总装车间可持续发展的重点课题。
3 自动化改造—“0-FIS”理念
结合公司“小投入、快产出、滚动发展”的理念,通过对国家政策、市场需求、技术发展趋势、国内外同行现状等深入调研分析,创新提出“0-FIS”理念,应对既有生产线的自动化改造工作。
“0-FIS”是指Zero(0损失)、Flexible(柔性化)、Intensive(集约化)、Smart(智能化),即在生产0损失的前提下,开展柔性化、集约化、智能化的装配工艺研究和应用(表1)。

表1 “0-FIS”理念的丰富内涵
0损失(Zero)是指在复杂生产环境下,充分整合现场人员、设备、场地等资源,优化工艺方案,确保改造对正常生产产量损失影响“0”化。
柔性化(Flexible)是指既有生产线改造必须保证多车型通用性,同时要满足节拍需求,这就要求自动化设备及工装夹具具备高通用性、高精度、高稳定性。
集约化(Intensive)是指通过对工艺编排、作业区域、设备性能的优化,在限定空间内扩展更多的功能,提高装配效率。
智能化(Smart)是指在“机器换人”过程中,不断深化大数据、物联网、人工智能等技术的应用程度,最终达成削减劳务费、提升品质的目的。
基于“0-FIS”理念,明确了推进思路,制定了中长期规划,从硬件、工艺、流程、功能上对既有生产线现场进行改造,构建高集约、高品质、高效率的总装工厂。
构建适合总装改造的理论基础后,通过由点到面(先单生产线实施,再跨线、跨工厂推广)的分步推进策略,开展国内外首创的工艺、技术创新,完成了一系列自动化项目的改造。表2是近年来开展的代表性自动化改造项目,一方面,公司为多车型批量混线生产模式,立项初期,需检讨明确改造项目能兼容全车型,实现柔性生产;同时,旨在通过从上料、安装到品质检查作业集成,达成总装工序高集约;另外,通过机器人替代人工,实现总装工序的自动化,通过视觉识别等新技术应用,在工序自动化的基础上,实现智能化;同时,基于现场满负荷生产,改造项目不能影响正常生产,需实现“0”损失生产改造。
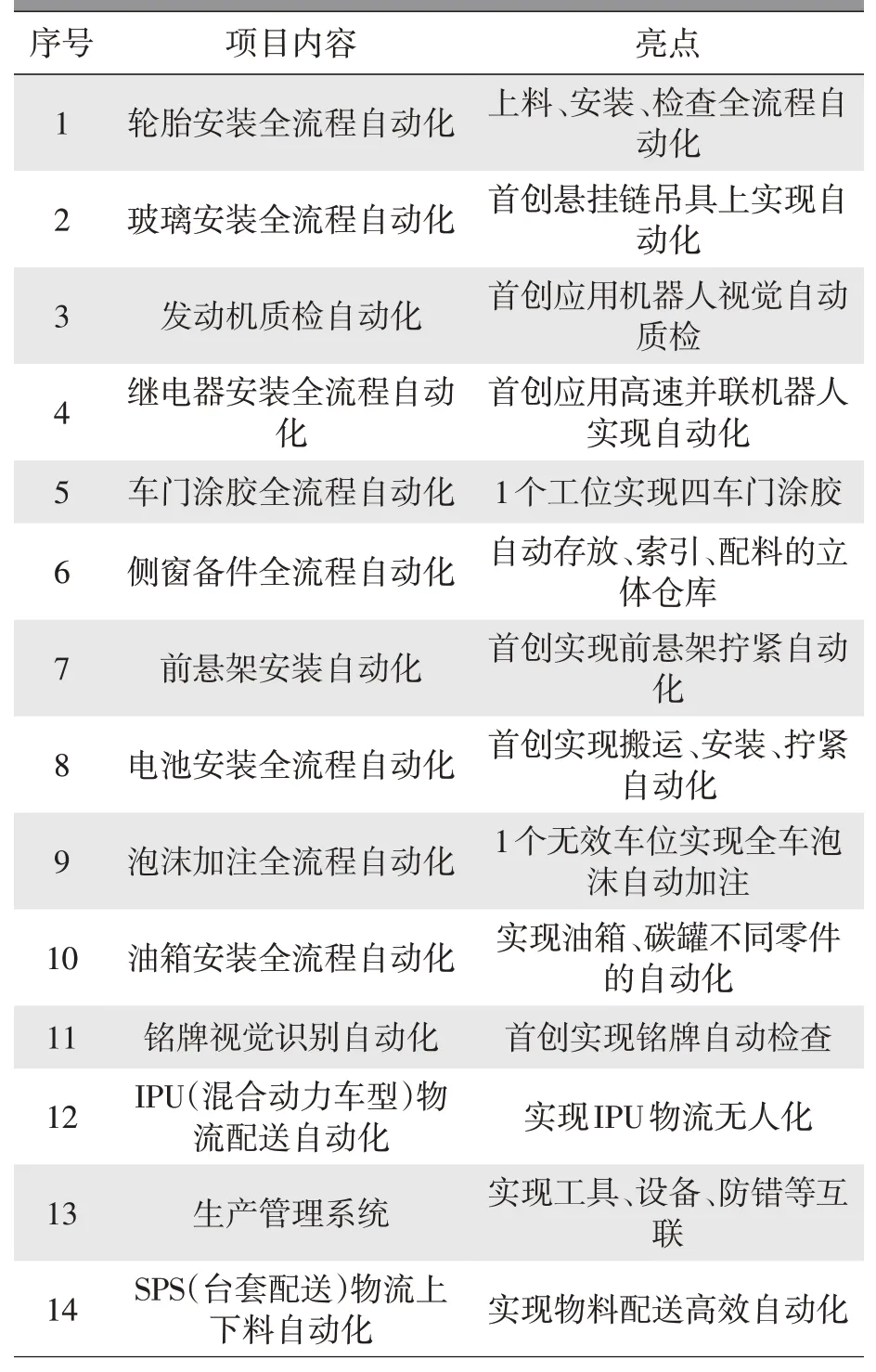
表2 近年推进的自动项目
4 自动化改造主要情况
4.1 企划先行,多措并举——0损失
4.1.1 因地制宜,分步投入
以前后挡风玻璃自动化装配为例,需在原有涂胶设备、零件输送链的基础上利旧改造。二次利用虽可减少投入,节约成本,但也给自动化设备导入带来了巨大困难。
为此,在前期将复杂工艺工序细分,对玻璃自动上料、玻璃脱脂剂与加强剂自动涂布、玻璃胶自动涂布、车身脱脂剂与加强剂自动涂布、玻璃自动安装工序进行模块化拆分,分阶段实施(表3),合理安排项目推进日程,确保设备顺利导入。

表3 前后挡风玻璃设备分步投入
4.1.2 长短结合,三步法施工
根据生产需求,为不影响正常生产,提出“三步法”施工,即利用长假期进行设备主体施工,利用周末进行碎片化工程施工,利用夜班时间进行整改完善,从而大幅降低改造工程对较长工期的硬性需求。
4.1.3 双循环调试及应急预案
首先是线外调试,第1步是采用软件仿真介入设备设计,建立技术模型方案,对设备布局、工序动作设计进行虚拟检证,提前试错,可显著缩短调试周期。第二步是在完成软件仿真后,通过设备试制,再次对工艺可行性进行检证,缩短调试周期。
进入在线调试阶段后,采用“小步快走”办法,随线先进行小批量的试生产,通过确认生产实绩,不断检证完善设备,确保能满足生产及品质要求。
在此基础上,还需制定双应急预案(设备应急预案、人员应急预案),确保异常状态下的生产对应。通过制定设备异常对应机制、预留人工作业PPA(潜在故障分析与对应)工位,从设备、人员、场地等方面,确保当设备出现异常情况时也能正常生产,达成0损失目标。
4.2 确保多车型的共线生产——柔性化
兼容性生产线的两大目标是高装配柔性和高生产效率。自动化设备导入虽与柔性化生产相悖(设备导入越多,则多车型共线适应生产难度越大),但整体来看,开展自动化有利于企业可持续发展,其在劳务费削减、品质提升方面具有强大竞争力。因此,在项目推进过程中,结合后续车型,提前规划,确保自动化设备能快速、高水平适配不同车型生产。
在程序柔性化方面,以发动机质检视觉识别自动化项目为例(图1),不同车型发动机装配点检查位置及内容均存在差异。在此情况下,通过设备程序优化,即在程序设定时,通过拍摄大量实车图片采集位置数据,对同一质检项目进行大数据比对,最终设定出检查规格。通过这样的工艺设计方法,确保后续车型的快速适配。

图1 发动机质检自动化
在夹具柔性化方面,总装承担着数量众多的零部件装配任务,每个零部件形状各异,安装时需要为机器人配备专用夹具来对零件进行夹持,这样1台机器人必然无法实现多种零件的安装[4]。
以侧窗玻璃夹具为例(图2),改造前是通过人手操作夹具实现玻璃夹紧,并由机器人对侧窗涂布玻璃胶。切换车型时,由于不同车型的玻璃外观差异大,无法使用同一套夹具,不得不依靠人工来搬运和更换夹具。基于现状,构思出高低差异化的夹具设计。通过导入具备高低差功能的夹具,实现不同规格侧窗玻璃的兼容。夹具的高拓展性与通用性,确保了后续车型轻松导入。

图2 侧窗高低差夹具设计
除通用夹具设计外,还致力夹具自动切换研究,例如轮胎拧紧装置中,四轴与五轴夹具自动切换(图3),不断削减夹具切换所带来的无效作业工时,提升作业效率。

图3 轮胎拧紧装置夹具自动切换
4.3 深度挖掘现场改造潜力——集约化
4.3.1 同类型要素集约
在工艺编成中,便有集约化的说法,工艺的排序和装配工时是互动的[5]。在本项目推进中,通过研究工艺编成,提出设备工艺集约的观点,即将同类型的动作要素作业集约化,进而实现设备需求最小化的自动化,节约现场资源。
以机舱继电器自动安装为例,改造前,继电器安装分散在14个工位,均为人工作业。对于继电器这样小而精密的电器元件,结合其安装精度高的特点,将原分散安装工序集约到一起,应用高速并联机器人,在1个工位实现机舱继电器集约化自动装配工作。
4.3.2 全工艺流程集约
在同类型工艺集约的基础上,将集约化观点应用拓展到全装配工艺流程[6]。简单来说,即将零件的安装过程从上料、人工装配、到质量检查的全工序集约化。
以前后挡风玻璃安装为例,其工艺包括前后挡风玻璃取件、玻璃脱脂剂涂布、玻璃加强剂涂布、玻璃涂胶,车身脱脂剂涂布、车身加强剂涂布、前后挡风玻璃安装、质量检查,现场作业分布在不同位置的多个车位上。在本项目推进中,将前后挡风玻璃装配全流程的所有工序全部集约到前后相邻的2个车位上(同时需占用线边部分面积,用于分装准备),通过集约化实现高效自动化安装。
4.3.3 设备功能布局集约
以上2种集约思路,均是基于工艺编成里的集约化思维,在设备编成上的拓展。众所周知,总装车间的有效车位是有限的稀缺资源,尤其随着装备的不断升级和增多,既有生产线车位不足已成为严重制约总装发展的重大课题。在此情况下,提出了不同设备区域集约化的观点,不断提升有效车位利用率,甚至向无效车位(即无法安排工艺作业的车位)拓展,为装配自动化设备布置提供了新思路。
以前后挡风玻璃和轮胎自动化安装为例,通过不同设备在同一区域的集约化布置,大幅削减快进快出和PPA工位的重复需求,在6个工位内实现前后挡风玻璃和轮胎全流程自动化装配(行业内需11~12个)。
另外,总装车间内大中型设备基本上是布置在地面上,而既有生产线基本是采取多折线布局,这就不可避免地在各工艺段连接区域产生很多空中无效车位。以前后挡风玻璃和轮胎自动安装为例(图4),利用空中无效车位进行设备布置,将自动化设备空中化布置,并通过升降机解决物流供应课题,实现在无效车位进行前后挡风玻璃和轮胎全流程自动安装,将无效车位转化成有效车位,同时削减了地面物流面积需求。
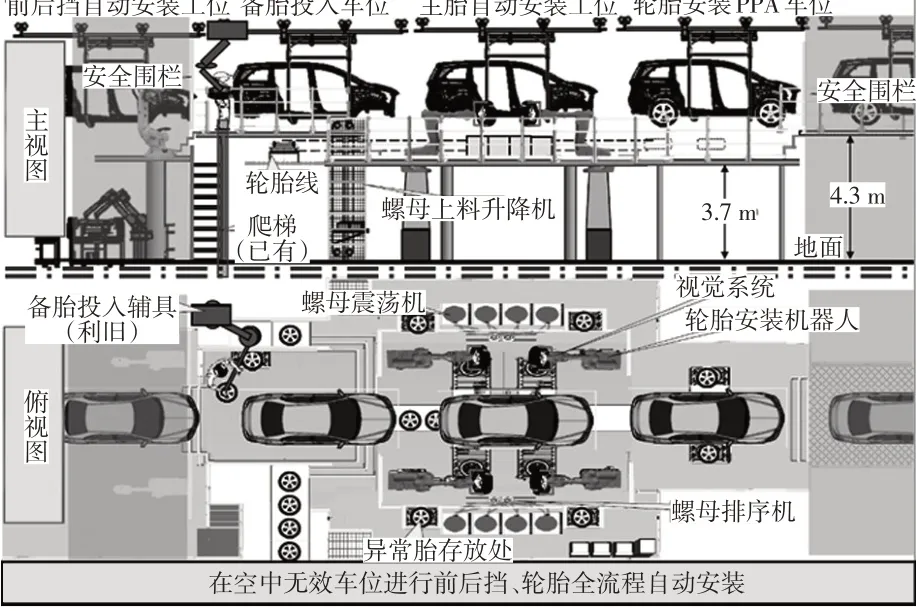
图4 无效车位的有效化利用
4.4 不断提高自动化改造效率——智能化
一直以来,行业自动化主要聚焦在装配作业要素的自动化上[7],对零件供应、品质检查较少关注。以轮胎装配为例,通过输送链实现轮胎物流自动供应,再通过拧紧轴实现螺母自动拧紧,但轮胎搬运、螺栓拿取均为人工作业。基于此,在立项初期便深入探讨,实现物流、装配到质检全过程自动化、智能化。
4.4.1 智能立体仓储
大部分自动化改造较少聚焦到零件自动供应。第一步通过拓展,将机器人与工装夹具结合,实现零件上料自动化,这是较为简单的应用场景;在此基础上,通过采用仓储式物流手段,在总装车间内导入立体仓库,实现侧窗与继电器的大批量自动供应。
以侧窗仓储为例,侧窗立体仓库为行业总装车间首创应用(图5),满足侧窗零件备件自动存放、索引、配料,实现线边零件智能仓储管理,大幅提高单位面积内侧窗零件存储量,直接减少了线边零件占用和切换时间,极大地提升了生产效率。
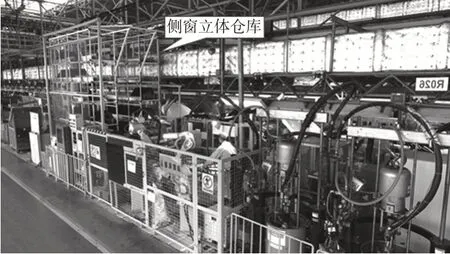
图5 智能化侧窗立体仓库
4.4.2 机器人系统精准参数化装配
装配动作自动化,主要通过自动化,用机器人来替代人工作业。目前行业内侧重于定性的作业结果,而作业过程定量的作业结果还有很大空白。以机舱继电器自动安装为例,除了将原分散安装工序集约到1个工位外,通过采用压力传感器、行程传感器,与执行安装动作的机器人有效结合,最终实现对继电器安装的按压力与按行程精确控制与记录[8],达成精准参数化安装。
4.4.3 闭环可追溯式智能检查
传统的总装品质检查几乎都是人工目视、经验化或检具检查。除检具检查外,目视、经验化检查均存在错检、漏检风险。在总装车间导入闭环可追溯式品质检查系统,确保有效规避错检、漏检风险。
以发动机装配品质检查为例,通过视觉识别技术与机器人的有机结合,实现发动机装配质量自动检查,并通过数据存储达成检查过程可追溯。
以前后挡风玻璃自动化安装为例,在设备中引入“作业—检查同步实施工艺”,即通过机器人、红外线与双目视觉系统的结合,实现脱脂剂与加强剂涂布在作业过程中的自动闭环、智能化检查,实现可追溯。
以上品质检查模式的升级,为总装工序保证能力提升、产品车品质稳定开创了新思路。
综上,实现了前后挡风玻璃、轮胎、车门密封胶、车载继电器、侧窗等多种工艺的全流程自动化。
5 项目经济/社会效益
“0-FIS”理念的提出与实施,尤其是“0损失”生产改造、装配工序集约、全流程工序自动化理念,为既有总装车间新设备、新工艺开发、自动化改造提供了新思路。通过自动化项目的实施,实现作业人员削减、物流面积释放、产能提升,取得了近1.1亿元的直接经济效益,同时间接增加产值23.8亿元,削减职业伤害岗位40个。
6 总装自动化的趋势和出路
作为零件种类、数量多、动作要素繁杂的总装车间,现在推进的自动化改造工作只是迈出了第一步。总装车间的自动化程度提升未来还大有可为。下面从工艺规划和技术应用两方面进行具体阐述,通过两者的交叉结合,形成具有总装特色的自动化应用措施。
6.1 工艺规划
6.1.1 单要素不同场景应用
总装现场动作要素多且同类型动作要素的实际差异较大。以螺栓紧固为例,实现了轮胎、前悬架等自动化紧固,但是螺栓紧固其它场景,例如机舱、底盘、内装等很难直接水平展开应用。面向未来,已实现的单要素自动化项目具备较大挖掘、推广价值。基于此,提出了支承紧固项目,通过拧紧工具的适应性改造,配合工业机器人,集成视觉识别技术,实现左右支承的自动化拧紧。
6.1.2 不同类要素深化应用
众所周知,总装动作要素较多,包含紧固、按压、涂抹、搬运、目视检查、扭力、插头连接等80余种。目前,已实现螺栓紧固、继电器按压等小部分工艺自动化。面向未来,在目前小部分要素自动化的基础上,全面深化识别更多现场要素,开展自动化应用。基于此,提出了前端模块合装、自动质检等,项目通过前端模块同步备件,已工业机器人配合输送线,由机器人完成模块的取件安装、紧固。
6.1.3 自动化物流深度结合
目前行业物流改善通常聚焦于自动供应,即通过自动牵引小车(AGV)牵引,将零件自动配送到岗位,实现精准台套式供应,实施力度仍然不足。在零件自动供应的基础上,检讨在零件上料方面继续拓展,即在零件供应到岗位后,通过机器人实现自动上料,基于此,提出了座椅、仪表台自动投入等项目,以仪表台自动投入为例,计划通过AGV将仪表台配送到线边,由机器人夹取仪表台随行投入到车内。
6.1.4 全流程工艺自动化
基于单作业要素不同场景应用、不同类要素深化应用和自动化物流深度结合,未来的另一个可行方向,是将这些单要素结合串联起来,实现零件上料、安装到质量检查关联工序全流程自动化。目前,已实现前后挡风玻璃、轮胎、继电器、车门涂胶等工序全流程自动化,未来需要继续扩大化开展,由点到面。基于此,提出了FEM(前端模块)自动安装、前后悬同步合装等,以前后悬同步合装为例,原为分开不同工位、人工配合辅具合装,新方案中,通过AGV随行,完成前后悬在同工位的对位安装、拧紧、品质检查项目。
6.2 技术应用
6.2.1 工业机器人应用
主要包括2个方面:一是单工业机器人的深度广泛应用,即通过机器人应用实现总装单要素的自动化,如质检自动化、支承紧固自动化等。二是机器人阵列的应用,即在前后工序不同要素自动化基础上,将不同功能的机器人集约到一起,搭建机器人阵列[9]。在第一阶段的项目中,前后挡风玻璃与轮胎自动化安装项目就初步应用了该思维,后续在前后悬同步合装、底盘分装线自动化等项目会继续拓展应用。
6.2.2 随行机器人应用
目前总装现场机器人以静态为主,即设置固定位置(静止工位)机器人,但总装现场为流水线作业,静止工位改造、快进快出车位设置存在成本问题[10]。为此,开展自动化随行技术探索,即随行机器人技术的展开应用,并基于此观点提出了VIN码自动拓印、前后悬同步自动合装等项目,通过机器人随行自动化提高现场利用率。
6.2.3 协作机器人应用
过往总装通过人+辅具实现备胎、蓄电池等重物投入,目的是减少员工劳动强度。未来协作机器人应用将更广泛,通过技术开发可实现重物搬运以外的多要素协助作业,如提取的螺栓规格识别项目,通过视觉识别与机器人技术的结合实现螺栓规格识别,可广泛推广应用。
6.2.4 新技术应用
未来总装车间要开展自动化,必然要不断导入新技术。例如,基于总装作业特性,视觉识别技术必将在现场进一步深化应用,包括单双目识别、激光识别、3D视觉识别技术。
通过工艺规划、技术应用,结合新技术的现场适应性改造,必将实现更多总装自动化突破创新,打造智能化生产车间[11]。同时,基于越来越多的工序自动化,可通过物联网形式,将总装现场的软硬件联结起来,实现网联化,进而达成生产现场数据化、生产品质透明化、变化点趋势可视化。
通过总装工艺规划及技术应用的简要阐述,展望未来总装车间自动化工艺规划及技术实施方向。相信随着自动化技术的不断发展,汽车行业总装车间也必将持续改善,不断进步。
猜你喜欢
军民两用技术与产品(2022年3期)2022-06-05
航天返回与遥感(2022年2期)2022-05-12
汽车实用技术(2022年4期)2022-03-07
昆钢科技(2021年4期)2021-11-06
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
百科探秘·航空航天(2021年12期)2021-01-15
汽车画刊(2020年5期)2020-10-20
祝您健康·文摘版(2020年3期)2020-04-09
润滑与密封(2019年4期)2019-04-22
现代家长(2018年11期)2018-01-05
