
上肢康复可穿戴式外骨骼助力机器人的机械设计与研究
2022-02-14 06:03汪宗保汪宗兵杨永晖王从振杨光李业甫
中国医疗器械杂志 2022年1期
【作 者】汪宗保 ,汪宗兵,杨永晖,王从振,杨光,李业甫
1 安徽中医药大学第三附属医院,合肥市,230031
2 安徽掌迅自动化科技有限公司,合肥市,230093
3 安徽中医药大学康复医学院,合肥市,230038
0 引言
上肢运动功能障碍是中风高致残偏瘫患者必须面对的康复问题[1]。而日益增多的致残患者对增长的高质量医疗需求相对于有限的专业治疗师来说,上肢康复的持续时间亦越来越显得不足[2]。脑损伤康复的本质源于大脑的神经可塑性,采用特定持续的训练方案及设备可促进脑损伤功能区域的恢复和功能重组[3-4]。需要解决上肢功能障碍的这些问题,科研人员必须开发机器人康复设备来助力执行重复性任务弥补运动训练的不足,也是当前的研究热点[5-6]。
基于人体上肢运动生物力学原理确定相关运动学参数,我们进行了生物力学分析和计算,设计了一种简单轻量化能够训练肌肉力量,与人体动作可以拟合的可穿戴康复助力上肢外骨骼三维模型,其设计具有很好的拟人性、可穿戴、柔性化、舒适性和安全性等,可满足医疗机构、个人、家庭使用要求,可保证外骨骼运动过程中的稳定性,并通过有限元验证其安全可靠性。
1 人体上肢解剖及关键关节的运动与自由度分析
1.1 上肢解剖结构
人体上肢结构可划分为肩部、上臂、前臂、腕部和手部等。包含静力性结构、动力性结构,解剖较为复杂,两者又受到中枢神经和周围神经结构繁琐的复杂交互控制发挥作用。狭义的肩关节即盂肱关节,由圆形肱骨头与肩胛骨的小凹形关节盂结合而成,是活动度极大的典型球窝关节;肘关节是连接前臂和上臂的重要关节,包含肱尺关节、肱桡关节和上尺桡关节,肱尺关节为铰链关节,肱桡关节为凹球面关节;手腕连接前臂和手,包括尺、桡骨远端、关节盘和掌骨,又称桡腕关节。
1.2 上肢关键关节的运动与自由度
上肢运动学是基于肩胛骨、肩、前臂和手的运动,每个参与上肢运动学的元素至少有一个范围的有限自由度。上肢运动往往同时需要肩、肘、手三部分配合完成,肩关节在运动过程中不同角度的变化影响肘关节在空间中的位置状态,相应手部也会发生空间姿态的变化。上肢各部分主要运动形式有:肩关节屈/伸、内收/外展和旋内/旋外,肘关节屈曲和伸展,前臂旋内/旋外运动,腕关节屈/伸、桡偏/尺偏、环转运动。
基于肩关节和肘关节在上肢生物运动机理中的重要作用,在外骨骼设计中应重点考虑,为简化机器人结构剔去上肢活动影响不大的自由度。将上肢可穿戴式外骨骼设计成具有6个主动自由度、1个被动自由度和1个肩部柔性化被动调整机构(粘弹性阻尼器)的机械助力装置。肩关节:屈/伸、内收/外展、旋内/旋外三个自由度;肘关节:屈/伸和旋内/旋外两个自由度;腕关节:屈/伸、桡偏/尺偏两个自由度[7]。各关节正常运动角度[8]及设计角度范围,如表1所示。另外,肩部三个自由度、肘部两个自由度和腕关节屈/伸自由度均设计为主动关节,腕关节桡偏/尺偏设计为被动自由度,暂不考虑腕关节旋内/旋外自由度。
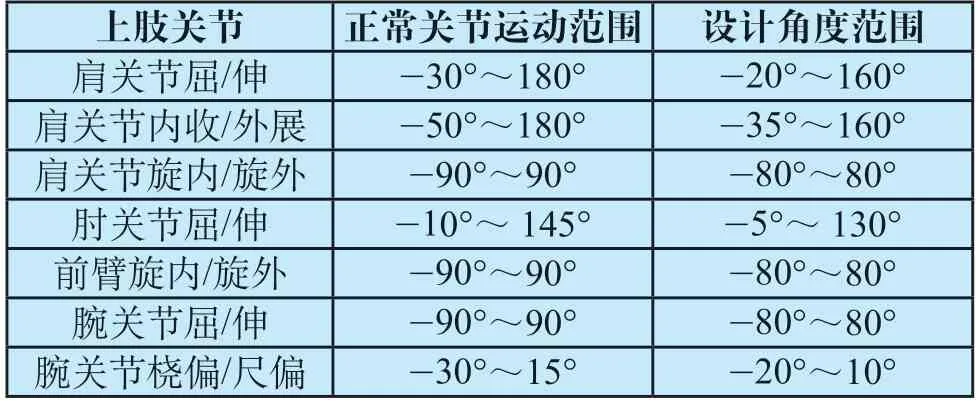
表1 上肢各关节运动及设计角度范围表Tab.1 Range of upper limb joint motion and design Angle
考虑人体差异性,且为了避免患者关节在康复训练过程中受到二次伤害,故在实际设计机械结构装置中考虑不影响人体正常运动需适当减小上肢各关节运动范围。
根据人体生物力学原理,我们利用CATIA软件对肩关节和肘关节重点分析。CATIA是法国达索公司开发的大型三维设计软件,具有人机工程学、模型设计和有限元分析模块,其人机工程学模块有中国、欧洲、美洲等全球人体模型数据。
2 上肢康复可穿戴式外骨骼结构设计
2.1 上肢康复科穿戴式外骨骼结构设计的关键尺寸
本研究设计尺寸依据1989年7月我国开始实施颁布的国家人体标准GB 10000-1988中国成年人人体尺寸[9]中涉及的16~60岁范围的男性标准尺寸。
我们选择身高1 775 mm/体重75 kg成年男子(涵盖95%男性国人)作为上肢康复可穿戴外骨骼设计过程中各部分尺寸的依据。考虑95%人群穿戴舒适性,上肢外骨骼机器人肩宽、上臂和前臂长度均设计有可调节可锁定机构。上肢康复可穿戴外骨骼机器人基本结构参数,如表2所示。
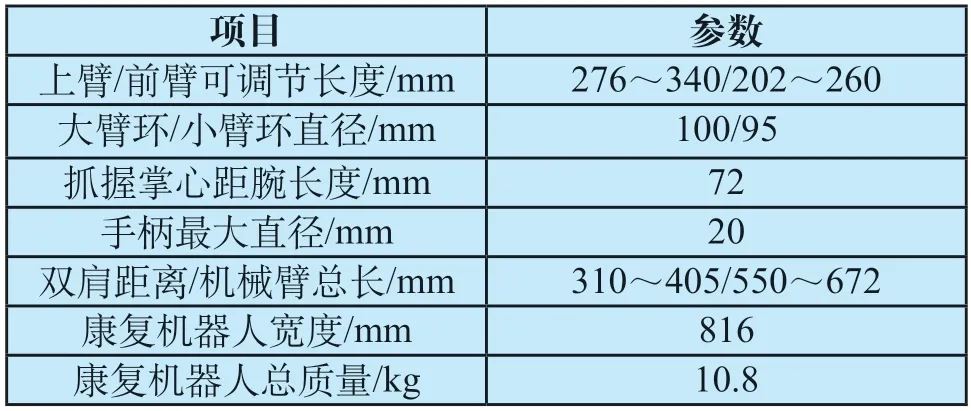
表2 上肢康复可穿戴外骨骼机器人基本结构尺寸Tab.2 Structural dimensions of upper limb rehabilitation wearable exoskeleton robot
2.2 上肢康复可穿戴外骨骼结构三维设计模型
根据人体上肢相关运动学结构特点、参数设计出上肢康复可穿戴式外骨骼机构三维模型,如图1所示。
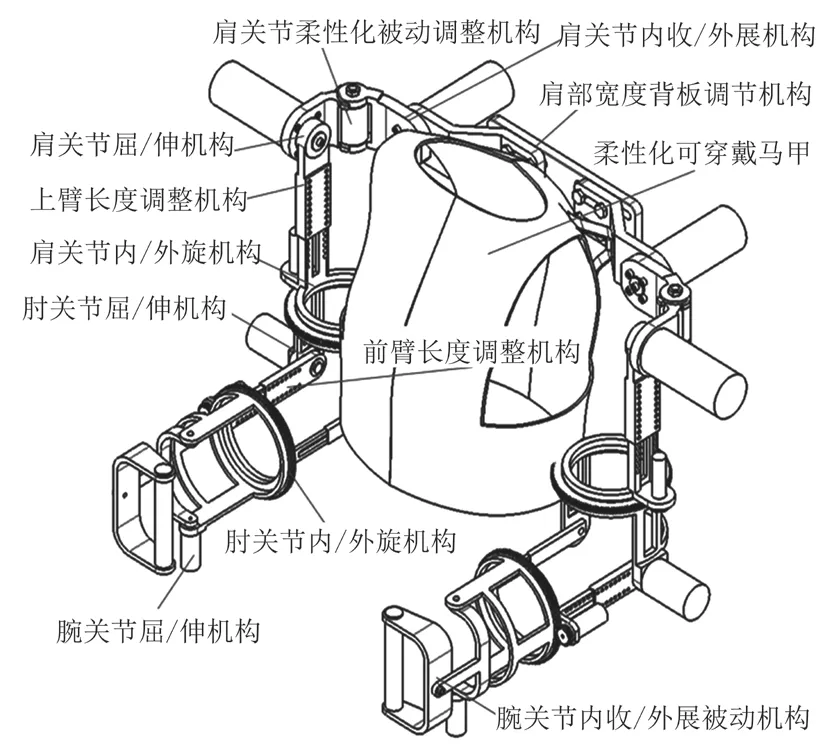
图1 上肢康复可穿戴式外骨骼三维模型Fig.1 3D model of upper limb rehabilitation wearable exoskeleton
本上肢康复可穿戴外骨骼采用柔性化可穿戴式结构,电动驱动。肩关节三个自由度(前屈/后伸、内收/外展、旋内/旋外)、肘关节两个自由度(屈/伸、旋内/旋外)和腕关节屈/伸自由度均设计为主动关节,每个自由度动作分别由功率、力矩相适应的单个电机驱动,腕关节内收/外展动作设计为被动自由度。肩关节和肘关节内/外旋动作分别采用单排四点接触球轴承齿形传动。
为具有良好的可穿戴性,上肢康复可穿戴外骨骼设计有可调节可锁定功能的肩部宽度背板调节机构、上臂长度调整机构和前臂长度调整机构,来调节外骨骼肩部宽度、上臂和前臂长度,满足不同身高、臂长患者(涵盖95%男性国人)的需求;同时肩关节处(肩关节屈/伸机构和内收/外展机构之间)设计有六向自由度的柔性化被动调整机构(粘弹性阻尼器),手部也设计有单向自由度的内收/外展被动机构,这两个被动调整机构能自动调整适应上肢外骨骼与患者在康复训练中的贴和程度,可保证患者在康复训练过程中的柔性化、舒适性、安全性等。
2.3 关节驱动力矩分析及其电机变速箱匹配
基于人体生物力学各部分重量公式计算上臂、前臂和手掌重量,初步设计三维模型,利用Catia软件测量质心和转动惯量的优势可精确求解外骨骼机械臂质心和转动惯量。上肢各关节不同自由度运动所需要的驱动扭矩由重力载荷和惯性力载荷构成[10]:

式(1)中:mi表示关节i和关节i+1之间的连杆质量;lij是表示关节i和关节i+1之间杆件质心到关节j轴线的极限距离;Jij表示关节i和关节i+1间的杆件质心相对关节j轴线的转动惯量;εj表示关节j的角加速度。
机械臂关节连杆相关尺寸,如图2所示。上臂长度调整范围为(276~340)mm,前臂长度调整范围为(202~260)mm。
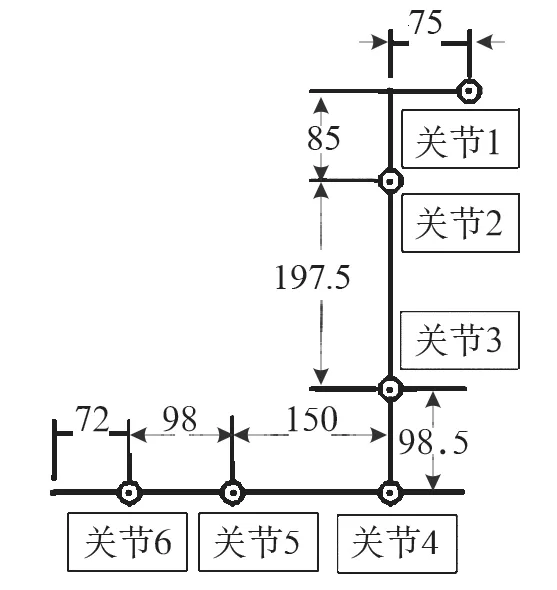
图2 机械臂关节连杆相关尺寸Fig.2 Relative linkage rod size of mechanical arm joint
人体生物力学上肢各部分质量参数(以人体质量75 kg为基础):人体上肢手掌质量、前臂质量和上臂质量分别为0.45 kg、1.35 kg和2.68 kg。
机械臂各杆件质量mi(kg)、依据人体上肢运动特征(结合康复治疗特点)而确定的机械臂各关节角速度ω(rad.s-1)和角加速度α(rad.s-2),如表3所示。
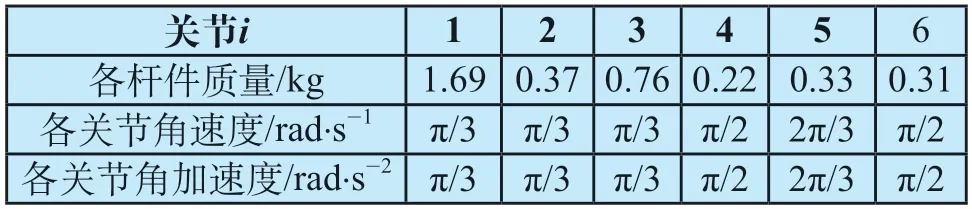
表3 机械臂各杆件质量、各关节角速度和角加速度Tab.3 Each rod member quality,angular velocity and angular acceleration of each joint in mechanical arm
将以上参数代入式(1),可得机械臂各关节的驱动力矩(N.m),如表4所示。

表4 机械臂各关节驱动力矩Tab.4 Each joint drive torque of mechanical arm
电机和变速箱选型:传动效率0.9,安全系数1.5,统一采用Maxon电机及其编码器等产品。各关节电机变速箱规格,如表5所示。

表5 机械臂各关节电机变速箱规格Tab.5 Gearbox specification of of each joint in mechanical arm
3 上肢康复可穿戴外骨骼整机强度和刚度校核
基于上肢康复外骨骼为可穿戴的轻质外骨骼细长形杆件结构,故在此我们对设计的整体机械结构强度和刚度进行应力应变分析。采用Catia软件的有限元模块并根据以下步骤进行分析:
(1)建立受力分析模型,并划分网格。
(2)确定机构模型材料的性能:航空铝合金7050-T73510,密度2 710 kg/m3,弹性模量为7.0×1010N/m2,泊松比为0.33,屈服强度为4.35×108N/m2。
(3)依据所设计的工作实际情况确定必须的约束、施加受力载荷(必须满足上肢和外骨骼本身的重量)。
(4)对目标上肢外骨骼机构进行有限元分析,结果如图3所示。
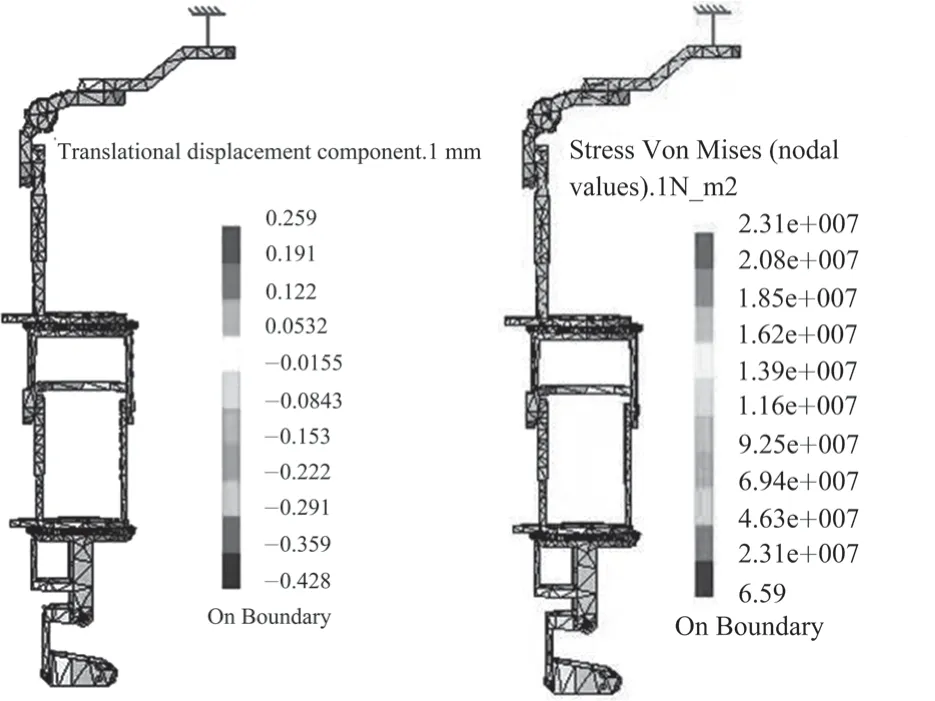
图3 上肢康复外骨骼位移和应力云图Fig.3 Displacement and stress nephogram of exoskeleton in upper limb rehabilitation
由图3 可看出:整机的最大应力为2.31×107N/m2,远远小于材料的屈服强度。最大变形量为0.259 mm,应力和应变满足了使用设计要求,结构安全,达到可靠性要求。
4 虚拟样机仿真和试验
4.1 虚拟样机仿真结果
将上肢外骨骼穿戴在人体上,形成虚拟样机模型,如图4所示。
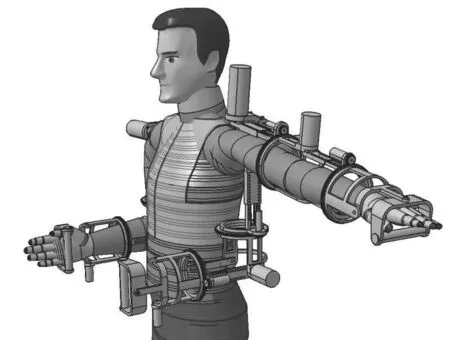
图4 上肢外骨骼虚拟样机Fig.4 Virtual prototype of upper limb exoskeleton
利用CATIA三维软件进行仿真分析,由于上肢康复外骨骼基于人体上肢骨骼运动机理进行设计,加之上肢外骨骼肩关节处设计有六向自由度柔性化自动调节粘弹性阻尼器,故上肢康复外骨骼在康复训练过程中与人体上肢康复运动具有良好的吻合度和上肢康复训练舒适性。
4.2 上肢各关节康复训练步骤及结果
患者在康复训练过程中,可以使用可穿戴的背部柔性化马甲将本上肢外骨骼穿戴于身体躯干和上肢,双臂置于两侧手臂可调节装置中,利用肩宽、上臂和前臂长度调节锁定机构来调节肩宽、上臂和前臂长度,调节完毕后用固定螺栓锁定,最后按照康复训练模式由整机控制程序驱动各关节电机完成相关动作所设定的康复训练内容。初步样机与人体上肢具有良好的运动协同性,初步试验与设计结果具有良好的一致性,可以满足人体康复训练高质量要求,后期会进一步多轮结构优化、试验来提高性能指标,达到最终产品定型投产。
5 结束语
本研究基于人体上肢运动机理,通过配置上肢外骨骼机器人的自由度、设定关节活动范围、确定基本结构连杆参数,分析计算关节驱动力矩,合理匹配电机和变速箱,利用CATIA软件进行了上肢各关节自由度分析、上肢康复可穿戴式外骨骼助力机器人虚拟样机的整体设计和有限元分析,设计了一种供人体上肢康复使用、具有六向自由度主动驱动外加柔性化被动调整机构的可穿戴式上肢外骨骼助力机械装置,可以为脑神经损伤或创伤引起的上肢运动功能障碍患者提供日常助力自主康复训练。根据设计、分析和样机试验结果,满足开发要求,具有较高的柔性化、可穿戴性和安全性等。
我们只针对上肢外骨骼机械机构部分进行了阐述、分析和设计,接下来将继续增强康复训练模式、控制逻辑、程序算法等分析和研究,丰富系统参数和结构优化,挖掘更多有用信息,使其具备更好的康复训练模式来评价上肢关节康复功能,更好地为上肢功能障碍患者服务。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
实用手外科杂志(2022年2期)2022-08-31
保健与生活(2021年20期)2021-10-15
小哥白尼(野生动物)(2021年12期)2021-03-29
学习与科普(2019年6期)2019-09-10
中华肩肘外科电子杂志(2019年4期)2019-08-24
轻兵器(2019年5期)2019-06-21
科学之谜(2018年5期)2018-07-26
大众健康(2016年3期)2016-05-31
中国民族民间医药·下半月(2014年2期)2014-09-26
