
三维激光扫描技术在地铁工程测量中的应用
2022-02-10 12:00许俊伟
智能建筑与智慧城市 2022年1期
许俊伟
(中铁隧道勘察设计研究院有限公司)
1 引言
目前,随着城市化进程不断加快,城市地区人口规模不断扩大,交通压力较大,因此,国内很多大中型城市开始建设地铁,以缓解因人口、车辆增长导致的交通压力。而城市地区地下环境复杂,管网系统密集,地铁工程施工难度较大,尤其是测量作业,易受到多种因素的影响。三维激光扫描技术的优势在于以激光为介质,可以实现无接触测量,通过计算激光的反射时间确定距离,并且通过多点测量可以获取多个点位数据信息,进而构建三维模型,这对于地铁工程施工活动的开展具有重要的参考价值,可以有效确保施工活动顺利进行。
2 工程概况
某地铁工程设计采用单圆隧道,隧道半径设计为2.75m,隧道目前尚未铺设轨道,施工段南侧区域是在建的厂房,正在进行基础施工,基坑开挖深度为9.85m,而该区间隧道顶面埋深仅11.9m,与厂房地下室的外墙间距最小处为35m。为确保施工活动顺利进行,拟采用三维激光扫描技术对该隧道区间进行测量,采集各项数据信息并进行处理分析,从而为施工活动提供依据。
在本项目中主要存在三方面的难点:
①测量任务比较繁重,工程工期紧,需要严格控制项目进度,需要在短时间内完成大量测量工作,对测量效率要求较高;
②本项目主要集中在市区范围内,地下环境以及周边环境复杂,干扰测量作业的因素较多,在实际作业过程中可能会出现较多阻碍;
③地铁工程施工精度要求极高,因此,在项目测量阶段必须获取准确的数据信息,否则会直接影响后续施工活动,测量作业人员必须保障测量精度。
3 三维激光扫描技术的原理及优势分析
3.1 技术原理
三维激光扫描技术(3D Laser Scanning Technol‐ogy)是测绘领域一种高精度、立体化、自动化扫描技术,可以高效、准确获取物体表面连续、全面、关联的以及密集的坐标数据信息以及影像信息,是继GPS技术后出现的一种新型测绘手段[1]。三维激光扫描技术原理如图1所示,以激光作为介质,通过计算输出激光的反射时间测算单点距离,通过根据激光反射的特定获取被测物体的其他相关信息,同时通过进行多点测量可以获取不同点位的坐标信息、反射率信息等,可以在短时间内获取到被测量物体比较全面的信息,在此基础上构建立体化三维模型[2]。相较于全站仪或者GPS等技术手段,三维激光扫描技术在数据采集效率方面具有明显优势,而且可以实现多点测量,这样就可以形成一个基于三维数据点的离散三维模型数据场,有效弥补了传统测量手段的片面性以及局限性。
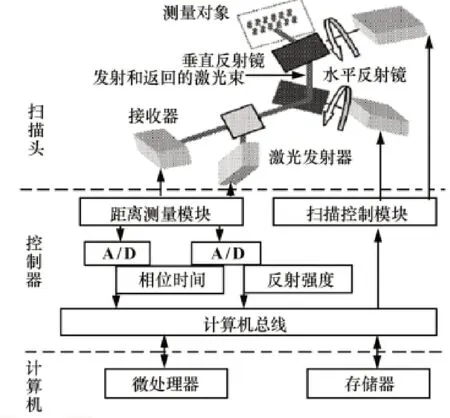
图1 三维激光扫描技术原理图示
3.2 优势分析
三维激光扫描技术作为目前测绘领域比较先进的技术手段,融合了多种测绘仪器功能以及先进技术手段,在地铁工程测量方面发挥着重要作用,相较于传统的测量手段,三维激光扫描技术的优势主要表现在以下几方面:
①测量作业效率高,测量速度在0.5m/s以上,在大型工程以及工期任务较紧的项目中采用三维激光扫描技术可以取得良好效果;
②测量点的密度大,每个断面采样点超过500个,获取的数据信息更加全面[3],适用于测量环境较为复杂或者作业面较大的工程项目;
③可以自主设置断面测量的间隔,适用性更强;
④获取的测量成果多且全面,可以得到任意间隔多断面图,隧道表面可以量测激光影像;
⑤测量成果的用途较广,在线路侵界、管片错台、裂缝、管环收敛以及隧道渗水等方面都具有参考价值;
⑥不需要接触测量目标,可以实现无损检测,对测量目标不会产生负面影响,尤其是在一些具有危险性的作业环境中,可以最大限度降低作业人员的风险;
⑦仪器架设的自由度比较高,相较于全站仪等传统设备来说,不需要进行对中操作,这意味着也就不会产生对中误差,并且架设地点可以灵活选择,环境影响因素较小。
4 三维激光扫描技术在地铁工程测量的应用
地铁工程基本上全程处于地下作业环境,而城市地区地下环境较为复杂,因此工程测量作业任务极为繁重,而且作业难度较大,为确保工程进度,要求测量作业必须在确保准确性的基础上提高作业效率,从而为后续施工活动提供基础依据。
4.1 测量仪器选择
在本项目测量作业中,测量仪器选择Leica P40三维激光扫描仪(见图2)与Leica TS50全站仪,软件处理系统选择Leica Cylone软件。该款扫描仪的精度较高,25m范围测量距离误差不超过±2mm,而且其最大扫描点可以达到97600点,可以满足本项目测量作业要求。

图2 Leica P40三维激光扫描仪
4.2 基础数据采集
首先需要设置扫描参数,参考同类工程测量作业经验,同时结合本项目实际情况,在项目中采用中等质量与速度开展测量作业,质量设定为4X,分辨率设定为1/5,每个测站测量时间控制在6min35s左右[4]。其次是标靶球摆放以及仪器设站,考虑到Leica P40三维激光扫描仪的有效测量范围,为确保采集数据的准确性,相邻测站间隔控制在30m左右。在本项目中,该隧道区间共设置6站,两端则摆放数量不等的标靶球,主要用来分辨测量范围。相邻测站之间需要摆放超过3个标靶球,需要注意的是,标靶球不能处于同一平面,否则会影响测量精度。
4.3 数据处理
关于数据处理主要分为四方面。首先是点云拼接以及噪点的处理,Leica P40三维激光扫描仪配套有专门的点云处理软件,可以采用该软件完成测站拼接;噪点的处理主要是采用Cyclone软件,利用该软件删除噪点。其次是搭建三角网模型,这是数据处理环节的重要内容,利用Geomagic软件选定合适的参数对处理好的点云数据搭建三角网模型[5],并通过与全站仪测量的数据进行对比,评估三维激光扫描技术的测量精度以及在本项目测量作业中的可靠性。要求采用三维激光扫描技术获取的测量结果与采用全站仪获取的测量结果误差不超过±22mm。再次是关于中心线的提取以及断面输出,提取中心线需要结合该隧道区间的模型提取,并按照每间隔2个环片的标准输出隧道中心线的法线方向上的断面图,要求输出的断面图采用DWG格式。最后是关于半径的测量,采用CAD软件输出三维模型,并以断面图的中心点位基点分别向正上、正右、正左、左45°、右45°这五个方向测量半径。
4.4 数据分析
本项目中选用的Leica P40三维激光扫描仪所获取的数据信息经过处理分析,比较全面地反映了该隧道区间的空间信息,尤其是在隧道变形监测方面具有重要作用。根据本项目中采集的数据信息以及数据处理结果分析,中轴线与工程设计轴线的误差最小为2mm,最大为7.5mm,均符合地铁工程施工标准;不同环半径和工程设计半径相比,最小误差为0.3mm,最大为4mm,均符合地铁工程建设标准;管片拼装误差最小为22.5mm,最大为26.3mm,管片拼装标准要求直径偏差不超过±6‰D,在本项目中允许最大偏差为27.0mm,因此也符合要求。
4.5 测量结果分析
经过外业扫描以及数据预处理后,以隧道轴线方向为X轴构建坐标系,在轴线正交方向按照每间隔1m截取点云切片,切片拟合后提取圆心坐标、半径。通过提取的隧道圆心坐标以及半径信息,可以确定隧道提取的半径、中轴线和设计半径与中轴线的差异。根据测量结果显示,提取的中轴线和设计中轴线最小误差为2mm,最大误差为23mm;提取的半径与设计半径的最小误差为0.3mm,最大误差为4.0mm,均符合地铁建设规范。根据隧道的收敛量标准,分别选择0°、90°、180°、270°方向上进行样条曲线拟合分析,结果显示在0°方向上管片半径值为2.4766m、在90°方向上管片半径值为2.575m、在180°方向上管片半径值为2.773m、在270°方向上管片半径值为2.796m;纵向平均半径值为2.7481m,经拟合分析后,在0°、90°、180°、270°方向上的收敛半径存在明显差异,横向平均半径大于纵向平均半径,并且和圆曲线拟合半径的偏差方向基本一致。
5 结语
综上所述,三维激光扫描技术在地铁工程测量作业方面具有明显优势,不仅能够适应复杂作业环境,而且测量数据精度高,测量作业效率高,能够快速构建三维数据模型,这对地铁工程施工活动具有重要参考价值。相较传统的测量手段,三维激光扫描技术更加符合现代工程设计施工领域测量作业的要求,尤其是大型工程设施以及环境条件较为复杂的工程。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年2期)2022-04-26
福建建筑(2021年4期)2021-05-24
铁道学报(2021年4期)2021-05-13
表面工程与再制造(2019年1期)2019-05-11
中等数学(2018年8期)2018-11-10
电子制作(2018年12期)2018-08-01
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
人间(2015年21期)2015-03-11
消费导刊(2014年12期)2015-02-13
数学大世界·初中生辅导版(2010年2期)2010-03-08
