终端区点融合系统研究与论述
2022-02-07 10:55谢丹红张嘉锐
智能城市 2022年12期
谢丹红 张嘉锐*
(1.北京颐和工程监理有限责任公司,北京 100000;2.中国民航大学空中交通管理学院,天津 300000)
随着民航业蓬勃发展,民航运输体系也在不断拓展,大型运输机场终端区的保障服务能力暂时不能适应这种变化,导致航班延误概率持续增加。终端区作为进离场航空器的过渡区域,终端区的运行效率与航班的准点率密切相关。传统的仪表飞行程序不能满足大流量情况下的航空器运行,管制员经常利用开环雷达引导的方式为航空器提供方向指引。雷达引导虽然灵活高效,但存在管制员工作负荷大,无线电通信频道拥堵,航空器安全间隔难把握等问题。当流量超过扇区最大容量时,将会引起大面积拥堵和延误,严重影响航空器的运行效率和安全。所以,为了克服雷达引导的缺点,提高终端区空域的运行效率,国际民航组织提出点融合程序。
点融合系统(Point Merge System,PMS)是由欧洲控制实验中心在2006年开发的一种测序到达流的系统化方法。区别于雷达引导,点融合技术是一种基于性能导航技术,并将进场程序和排序空域方面集成应用的新型程序,由雷达的开环引导航向,变为闭环直飞融合点指令,实现对多方向进场交通流排序和间隔管理,成为优化空域、增加终端区运行容量、减轻管制员工作负荷和提高空域运行效率的新技术。
1 PMS的组成部分
基于性能导航PBN技术与雷达管制相结合,点融合技术是一种对进场航空器的飞行轨迹进行优化与改进的进场飞行程序。管制员可以对PMS程序中运行的航空器进行着陆排序,以期减小延误,降低管制员工作负荷。
完整的PMS是由融合点、定位点以及排序边组成的近似扇形的空域结构。点融合程序运行示意图如图1所示。
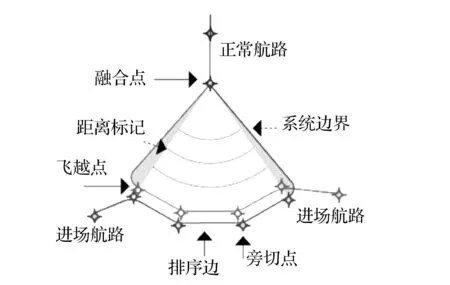
图1 点融合程序运行示意图
(1)融合点。
融合点是一个具有高度空间的经纬度坐标点,在终端区范围内负责航空器的集成疏导,将不同方向的航班交通流汇集在该点,形成一条排序合理,间隔得当,相对统一的着陆交通流。
选取融合点位置时,应该确保不影响原有的飞行程序,并将点融合技术融入原有的飞行程序中,保证航空器能够高效率地进场排序降落。一般情况下,融合点的最理想位置是距离五边距离相等的点位,如起始定位点附近位置。若该机场终端区存在空域不允许的情况,也可以设置于距离三边较近的位置。
(2)定位点。
定位点主要由旁切航路点和飞越航路点组成。旁切点一般位于内外排序弧上的几个区域导航定位点,使飞机可以在排序弧上以较小的角度运行,主要是帮助管制员判断航空器之间间隔,防止航空器相撞。飞越点一般在排序弧最后一点,当飞机到达飞越点上空时,若未收到管制员的直飞指令,航空器应立即转弯直飞融合点,执行应急程序。
(3)排序边。
排序边是以融合点为圆心的近似圆弧航段,类似于扇形的内外两条弧,每条弧上的航空器到融合点的距离相等。该结构设计用于拉伸或缩短航空器的飞行路径,从而增加或减少等待时间,使航空器在点融合系统上进行安全地排序等待。
航空器在排序边上飞行时可随时被管制员按照实际情况进行转弯引导,直飞融合点;未收到直飞指令的航空器则继续在排序弧上等待飞行,但管制员仍可通过在排序弧上的航空器发布指令调整航空器在排序弧上的飞行时间,从而满足航空器之间的间隔。
为了保证靠近外部的排序边航迹上的航空器直飞融合点过程中可以穿越内部排序边,确保两条排序边有一定的高度差,即垂直间隔,设计内部排序边高度高于外部排序边。内外排序边需要满足最小垂直间隔与水平间隔限制,避免不同方向的飞机发生冲突。
2 PMS的设计原理
点融合结构是一个扇形区域形状,基于单一排序边上所有点到融合点距离相等的原理,最终目的是整合终端区航空器到达流,保证航空器之间的安全间隔,共包括两个阶段:创造间隔和保持间隔。通过这两个阶段,可使航空器飞过排序段,达到足够的间隔,进而使ATC向融合点发出“直达”指令。飞机将立即进行转弯并直飞融合点,完成最后进近阶段。
PMS设计时应综合考虑运行环境、空域结构、超障要求、下降梯度等因素[1]。对于超障,由于进场航空器可以从排序边任意点转向融合点,故融合点与排序边所围区域内部的超障应全部按飞行程序保护区主区进行评估,融合点与排序边所围区域外部的超障按飞行程序保护区主区和副区进行评估。
3 PMS系统构型及运行模式
点融合系统根据融合点的个数可以分为单点融合系统和多点融合系统。根据排序弧重叠部分可以分为全长重叠、部分飞行路径重叠和完全相隔分离三种情况。运行过程中,若有特殊情况出现,点融合系统可分为正常情况运行和非正常情况运行。PMS程序排序弧不同几何构型如图2所示。

图2 PMS程序排序弧不同几何构型
多点融合系统是将两个或两个以上的单点融合系统并联或串联起来,使航空器汇聚到同一个融合点,进而有效处理多个不同方向进场航空器流的排序及进近着陆情况。但目前多点融合系统多为并联方式,未使用串联方式。并联多点融合系统又可分为完全对称型、小偏置型、大偏置型三类。
完全对称型进场航空器飞越融合点后存在对头飞行,冲突较大,管制员需要配置不同的高度层,尤其是当流量过大时,运行难以实现,因此使用较少。偏置型并联多点融合系统通过相互偏置不同的PMS,避免对头飞行,并借助偏置的进场航线,为管制员调配不同PMS进场航空器汇聚时的潜在飞行冲突提供帮助。但小偏置型的调配时机较短,文章推荐使用大偏置型并联多点融合系统。
在排序边的竖直间隔方向上按照飞行航迹分为保持平飞、先下降再保持和连续下降三类情况。在排序边上,飞行路径的方向可以根据实际情况设置成相同方向和相反方向的不同情况。
在实际的空域管制运行中,终端区域内可以根据不同的流量情况、环境变化,结合多种方式组合成不同的航空器飞行情况,不断调整设计,使空域运行更加高效合理。
点融合程序特殊情况汇总[2]如表1所示。点融合程序具有向下兼容的雷达引导功能,管制员可以在飞行过程中指挥航空器恢复雷达引导模式运行,提供优质的飞行保障。

表1 点融合程序特殊情况汇总
4 PMS程序优势及效率评估实例
4.1 与区域导航结构特点分析
为了高效地进行终端区进场航段交通流的排序与管理,解决空域拥挤问题,终端区多采用区域导航,其导航方式为开环雷达引导,雷达引导存在部分问题,如导致管制员工作负荷大、无线电通信频道拥堵、航空器安全间隔难把握等。当航空器流量超过扇区最大容量时,会引起大面积拥堵和延误,严重影响航空器的运行效率和安全。欧洲为了解决空域流量拥挤问题,在进行相关研究后,学者提出了早期的点融合系统技术雏形,即汇聚没有航向引导的单跑道进离场航班流。仅考虑一条跑道的方式能够有效贴合跑道本身的航班流特质,对于不同的跑道构型可以设置特殊的进离场程序。在多个机场进行模拟验证后,管制员对于航空器下达的指令数和频道占用率明显减少,证明了点融合程序的优势性和可行性。
点融合系统的进场程序结构是建立在多维立体的环形航路上,体现了将交通流进行融合的目标特征。在汇聚集中过程中的特点表现为:每个圆弧排序边与融合点的位置距离需要近似的距离相同,相邻排序边的侧向间隔具有一定空间,一条排序边上的前后两个航空器留有足够的间距,在内部排序边与外部排序边之间存在设定好的高度差形成垂直间隔,在同一个三维立体空间内,航空器的三维安全间隔都得到了有效保障。
与现行标准仪表进场程序结构相比,点融合系统表现的优点为:在终端区机动区域内,交通流航路更加简洁直观;融合点之后,航迹相对统一,航迹指令更准确;PMS解决了排序和间隔问题,确定了航空器的着陆顺序,有利于进近;连续下降的方式,噪音降低,利于环保[3];辅助飞行员建立更好的情景意识,减少管制员的工作负荷。
4.2 PMS效率评估及优化管理实例
Boursier等提出了不使用航向指令的合并到达流的点融合系统方法。小规模实验结果表明,点融合方法在高密度交通需求下表现良好。通过快速时间模拟技术将点融合与雷达引导方法进行比较,结果表明,与雷达引导相比,点融合模型的管制员平均负荷减少20%,对飞行员的指令数减少30%。NATS证实通过使用点融合技术,2013年在都柏林机场降落的航空公司将燃油需求降低了19.1%;飞机缩短了11.3 km的飞行时间。点融合技术节省了23 500 t CO2,同比减少了19%。目前,PMS技术已经推广到罗马、布鲁塞尔、日内瓦等国家,也为全面实施4D航迹运行管理奠定了重要基础。在国内民用运输机场中,2019年~2021年,上海、广州、深圳相继展开电融合系统设计,并陆续投入使用[4]。
5 结语
PMS在雷达管制实时监视空域态和RANV导航灵活性的优势之上,基于排序边上任意点至融合点距离相等的原理,可以高效地解决和调配终端区密集的航班流,解决不同方向进场航班流的冲突调配和排序问题。经过大量机场实施验证对比,PMS与传统程序相比,指令数大幅度减少,减小了飞行员和管制员的工作负荷,减缓了因为航班密集造成的延误,进一步提升空域中的飞行安全和运行效率。
猜你喜欢
西安航空学院学报(2022年5期)2023-01-04
知识经济·中国直销(2018年12期)2018-12-29
新商务周刊(2018年15期)2018-12-06
证券市场红周刊(2018年22期)2018-05-14
证券市场红周刊(2018年26期)2018-05-14
北京航空航天大学学报(2017年4期)2017-11-23
航空知识(2017年2期)2017-03-17
北京航空航天大学学报(2016年7期)2016-11-16
太空探索(2016年3期)2016-07-12
太空探索(2016年8期)2016-07-10