下肢外骨骼机器人在脊髓损伤中的应用研究进展
2022-02-03 03:37王锋李靖龙
实用医学杂志 2022年23期
王锋 李靖龙
1昆明理工大学医学院(昆明 650000);2云南省第一人民医院/昆明理工大学附属医院(昆明 650000)
脊髓损伤(spinal cord injury,SCI)是一种致残性疾病,以感觉、运动和自主神经功能障碍为主要表现,使患者的家庭和社会背负了沉重的经济负担[1]。目前全球SCI呈现高发趋势,疾病负担日益加重,我国亦为SCI高发生率国家,我国SCI患者超过300多万例,每年新增患者病例更是高达9万例[2]。许多SCI患者伴有行走功能障碍,终身被限制在轮椅上,从而产生一系列并发症,如体位性低血压、痉挛、骨质疏松、肌肉萎缩、疼痛、心理障碍、认知障碍和病理性骨折等,导致生存质量下降[3-12]。据统计,全球每年约有2 700万患者患有SCI后遗症,每个SCI患者平均每年花费约7万美元[13]。
对于SCI患者,恢复运动能力是重中之重。据相关研究报道,传统的康复训练存在消耗人力资源、训练时不具备可重复性和持续性、患者缺乏主动性等缺点,因此疗效有限。外骨骼机器人则另辟蹊径,通过辅以外部助力系统,从机械辅助的角度帮助SCI患者恢复活动能力。本文旨在就下肢外骨骼机器人在SCI中的应用研究进展进行综述,以期为SCI患者术后的康复基础研究及临床治疗方案提供一定的参考和借鉴。
1 下肢外骨骼机器人简介
下肢外骨骼机器人是一种模仿自然界中外骨骼生物,并结合康复医学、运动生物力学、人体工程学、控制理论、信息处理技术等原理设计的仿生机器人,可佩戴在人体下肢上,在用户控制下完成特定任务[14]。该设备可辅助各种SCI合并下肢运动功能障碍患者重新站立及行走(图1),相比传统康复治疗,它以更符合生理学的方式,提供一种高强度和可重复的个体化下肢步态训练,使患者在医院或家中就能进行科学而有效的康复功能训练,更好地提高了患者行走的耐力和独立性,为下肢功能障碍患者提供了重返社会的可能性[15]。下肢外骨骼机器人主要由感知系统、控制系统、驱动系统、人机交互系统以及能源系统五大关键系统组成,可通过安装在患者肢体上的传感器获得各项数据(包括各种能量、角度以及扭矩等)或生物电信号,并将这些信息传输至中央控制处理器,经过控制器内部接受、计算、分析、编码,转换为控制外部设备的指令,再传递到驱动系统,最终由驱动系统带动外骨骼的行动,实现人与外界的交流以及对外部环境的控制(图2)[16]。

图1 外骨骼运用于各种瘫痪患者Fig.1 Exoskeletons are used in a variety of paralysed patients
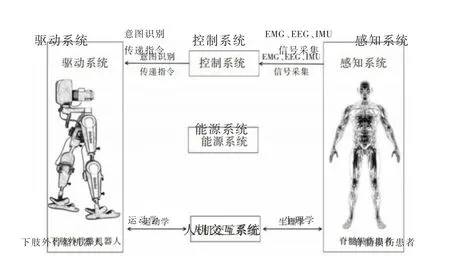
图2 下肢外骨骼机器人工作原理Fig.2 The working principle of lower limb exoskeleton robot
2 下肢外骨骼机器人在脊髓损伤中的研究
近年来,随着瘫痪患者数量逐年增多,康复人才紧缺,康复医疗资源的供需矛盾激化,外骨骼机器人开始走进人们的视线。这一辅具不仅将专业康复治疗师从繁重的工作中解放出来,还提高了SCI患者接受康复治疗的效率。目前,下肢外骨骼机器人在SCI中主要有两种应用,按其功能用途分类可以分为功能辅助型和功能康复型[17]。功能康复型下肢外骨骼机器人,主要面向下肢运动功能障碍的患者,通过机器人辅助步态训练,以达到逐渐恢复下肢运动的能力,实现自主行走,如Lokomat、LOPES、ALEX等。功能辅助型下肢外骨骼机器人,这类机器人主要面向丧失下肢运动能力的残疾人,以帮助他们能够像正常人那样站立以及行走,如HAL、ReWalk、Indego、EKSO 等。两者的最大区别是前者只能帮助使用者在原地行走并进行康复训练,而后者是可以辅助佩戴者进行远距离行走。下肢外骨骼机器人可增加SCI患者康复训练的时间,减轻康复治疗师工作强度,帮助使用者完成上下楼梯、跨越障碍等轮椅不能完成的任务。
近年来,外骨骼机器人已经取得了很大的进步。VOUGA 等[18]设计的TWIICE One外骨骼机器人以极简主义为理念,在提升设备坚固性以及降低设备重量的基础上,结合了智能辅助系统,即通过与智能手机或智能手表结合,实时监测患者的训练状态并发出相应的指令,调整设备的运行模式。2021年,SHEPERTYCKY 等[19]开发轻质背包外骨骼机器人,用于辅助行走,该设备可为受试者提供一定的助力,从而降低行走时的能量消耗。JUNG等[20]通过复刻人体下肢解刨学结构,把刚性材料(杆)比作骨骼,软性组件(电缆)比作软组织,并将二者结合,最终设计出了一款柔性-刚性下肢外骨骼机器人,其动力学行为等同于肌肉骨骼系统。该设备具有与人体相似的灵活性和运动范围,大大提高了人机适应性。CHEN等[21]研发出可穿戴的下肢外骨骼机器人Ai⁃robot,该设备可以提供足够的力量来辅助行走,而无需下肢的主动运动。Ai⁃ro⁃bot分两种类型,即Aiwalker and Ailegs。Aiwalker的特点是体积小,易于移动,步行练习可以在悬挂时或在真实地面上进行,同时速度和步幅也可以根据需要进行调整,适用于SCI慢性期的康复。Ailegs则没有支撑平台,适用于步态训练后期上肢和躯干功能良好的患者,但它需要配备拐杖,以便在使用时保持平衡。LU等[22]为了实现偏瘫患者正常行走,根据仿生学原理提出了单腿外骨骼机器人,并提出了一种针对此类行走特性的自适应调整策略,使外骨骼的步态根据健康腿的步幅和步幅频率实时调整,从而达到更加自然的行走步态。GAO等[23]基于一种创新的仿真下肢外骨骼康复机器人设计理念,在深入了解传统康复训练的弊端和康复机器人性能的基础上,根据康复医学和仿真设计的原则设计了具有多自由度的髋关节、膝盖和踝关节外骨骼结构。结果表明,下肢外骨骼康复机器人系统具有良好的佩戴舒适性和运动灵活性,其运动自由度更是与人体运动的自由度高度匹配。TIAN等[24]设计了单电机驱动多关节下肢外骨骼机器人,以减少下肢外骨骼的驱动电机数量、整体重量以及结构复杂程度,实验结果验证了单电机驱动多关节的方案可行性和有效性。刘建辉等[25]为了更好的实现人机耦合,还设计拥有10个自由度的下肢外骨骼机器人。通过ADAMS仿真分析和样机试验,证实了该产品具有稳定的协同运动性,且运动过程中舒适性较高。在此基础上为满足不同身高体重的SCI患者,该设备更是在大腿、小腿以及绑带中心设计了一种可伸缩装置,增加了设备的易用性。SHI等[26]设计了具有收集人体运动时的动能并转化为电能的轻便外骨骼机器人,收集的能量被存储在超级电容器中,以便在需要时为无线传感设备供电,一定程度上延长了外骨骼运行时间。
3 下肢外骨骼机器人在SCI中的临床应用
大量的临床证据,对于SCI患者,SCI患者的机器人辅助步态训练可促进身体代偿功能和神经的可塑性,不仅有效安全,还可以减少褥疮、肺部感染、骨质疏松、心肺及尿路感染等多系统并发症的发生率,提高患者的生存质量,降低康复护理成本[27-28]。
3.1 维持姿势以及身体平衡下肢外骨骼机器人可为SCI患者提供一定的助力,辅助患者被动或主动康复训练,激活躯干肌群,使患者在姿势控制和运动策略学习中产生积极作用。姿势控制机制又可进一步激活躯干肌群,增强躯干肌肉的力量,提高患者对身体平衡的控制能力,纠正不良坐姿[29]。
3.2 改善异常步态和辅助行走下肢外骨骼机器人可以给患侧提供一定的助力,降低患侧下肢肌肉张力,纠正其足内翻等畸形,从而显著增加步长、耐力以及步速,减少支撑相时间,最终达到改善SCI患者异常步态的目的。而且长时间的地面行走训练,可以增加下肢步行距离,提升步行速度,改善下肢肌力,帮助患者恢复甚至重建正常的行走步态。KIM等[30]通过对10例SCI患者进行了外骨骼机器人辅助步态训练,分别测量初期、中期、晚期的6 min步行试验和定时起动试验以评估行走功能,结果显示,患者的行走功能得到了显著的改善。
3.3 生存质量的改善SCI患者可能会经历身体表征的变化,导致对身体形象的不满、自尊心的丧失、患者总体心理健康、生存质量和情绪的降低。下肢外骨骼机器人辅助SCI患者完成部分日常活动,提高患者的生活自理能力,有助于改善SCI患者的身体表征,从而减少心理困扰及降低心理疾病的发生率,改善生存质量[31]。
3.4 心肺功能的改善长时间的机器人外骨骼辅助行走可产生中等强度的运动水平,提供足够的刺激来增强SCI人群的心血管功能,提高耗氧量和心率,促进血液循环,降低患心血管疾病的风险并改善身体健康状况。FAHIKNER等[32]对6例SCI患者进行了为期5 d的外骨骼机器人辅助步态训练,研究结果显示,受试者的动脉反射波增强指数及平均动脉压显著降低。ALAJAM等[33]对在此基础上,将训练时间延长至8周后发现,SCI患者的高密度脂蛋白显著升高,高密度脂蛋白与低密度脂蛋白的比值以及C反应蛋白显著降低。此外,与常规训练相比,外骨骼辅助步行训练对脊髓损伤患者的FVC、FVC%和FEV1等肺功能参数均有显著的改善[34]。
3.5 降低压疮的发生率,改善代谢功能下肢外骨骼机器人辅助SCI患者重新站立行走,可有效降低压疮的发生率,同时促进胃肠蠕动,改善排便[35]。此外,适当的康复功能训练,可延缓失用性肌萎缩的进展,增加肌肉对骨骼的机械应力,使骨转化趋于正平衡,防止骨质进一步流失,改善骨骼质量,提升骨密度,降低病理性骨质的发生率[36]。
4 下肢外骨骼机器人在脊髓损伤中的临床应用存在问题
4.1 穿戴的便携性和舒适性传统的下肢外骨骼机器人通常采用大量的刚性连杆或金属刚性结构,设备臃肿笨重,穿戴不便,环境的适应性和运动的灵活性较差,且通常需要监督(康复医师)和使用助行器,很难运用至日常生活中。柔性外骨骼的出现为这一现状提供了解决方案。其好处有:(1)重量轻,能将系统重量集中到腰部;(2)结构柔软,适合不同类型的患者;(3)步行辅助更自然;(4)它可以隐藏在衣服内部,不易引起注意,减轻了穿着者的心理负担。
4.2 缺乏全面的康复评估系统由于不同类型的SCI患者在不同康复阶段的运动能力是不一样的,即康复需求不同。而目前并没有一个完整的下肢外骨骼机器人辅助康复评估系统,这就导致有些患者得到的助力模式并不是其正真需要的,使人机融合较为困难,影响佩戴者的运动功能及体验感,严重时甚至在步态训练过程中出现皮肤擦伤、“拖拽”穿戴者等情况,导致佩戴者对外骨骼机器人产生排斥心理。为此,我们需要建议一个全面的康复评估系统,用于指导下肢外骨骼机器人为SCI患者提供合适的助力模式,使其在运动方式、训练模式、作业姿态及人机交互方式等方面更具有适应性和灵活性。
4.3 成本许多下肢外骨骼机器人的共同问题是研发成本太高,这对于普通人来说是一笔高额的开销,导致大多数SCI患者仅限于在特定的康复治疗中使用此类设备,而不是在日常生活中使用[37]。研究发现,在机械方面,高成本通常与高转矩驱动有关;在电子方面,高成本主要与昂贵的实时操作系统有关;在传感方面,高成本通常与昂贵的力传感器有关[38]。因此,为实现下肢外骨骼机器人价格的大众化,应在保证康复效果的前提下,结合驱动器、电池和传感器的新技术,尽可能的用价格较为低廉的元件去替换那些高值耗材或减少高值耗材的数量,从而帮助更多的患者接受、选择和使用此类设备。
4.4 不良事件外骨骼辅助训练引起的不良事件,主要包括皮肤擦伤、踝关节肿胀、肌肉酸痛、头晕、扭伤、疲劳等。其中,最常见的不良事件是皮肤擦伤,足跟处是训练中常报道的擦伤部位;而不太常见的是极度疲劳、跌倒、骨折或肌肉拉伤等。不良事件发生的原因可能是缺乏外骨骼使用经验导致。因此,在未来应加强对下肢外骨骼机器人相关知识的普及,针对每一例SCI患者进行专业技能培训,使更多患者获得康复帮助。
4.5 能源的续航目前,有部分下肢外骨骼机器人属于动力辅助装置,需要电池为期续航,但电池的续航能力越大,体积越大,设备也就越重,且SCI患者无法独立完成电池的更换工作。针对此类问题,基于高效、便捷和轻小型的燃料电池、太阳能充电系统以及生物能源等新能源技术目前已在一些外骨骼机器人样机上进行了少量探索性研究,未来有望成为外骨骼机器人的主要能源供应方式。
5 总结
综上所述,外骨骼机器人技术的出现可以从三个方面使SCI人群受益:(1)高强度的重复步态训练可以帮助他们提高和恢复行走能力;(2)可以减少对康复师体力劳动的需求,提高康复效率,缩短康复疗程;(3)可以减少SCI继发性并发症,提高生存质量,缓解家庭及社会经济复旦。外骨骼机器人作为SCI康复手段之一,如今正逐渐朝向多元化、智能化和个体化发展,虽目前仍存在一定的局限,需要继续改进与强化,易用性应是其最大的特点。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
现代临床医学(2022年4期)2022-09-29
小哥白尼(野生动物)(2021年12期)2021-03-29
轻兵器(2019年5期)2019-06-21
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
大众健康(2016年3期)2016-05-31
中华骨与关节外科杂志(2016年3期)2016-05-17
中国医疗美容(2015年2期)2015-07-19