
计及电容过渡过程的双钳位型MMC 电磁暂态高效仿真方法
2022-02-02 08:39邱子鉴庞博涵郭海平许明旺姚蜀军
电力系统自动化 2022年24期
刘 晋,邱子鉴,庞博涵,郭海平,许明旺,姚蜀军
(1. 华北电力大学电气与电子工程学院,北京市 102206;2. 国网北京市电力公司,北京市 100031;3. 直流输电技术国家重点实验室(中国南方电网科学研究院有限责任公司),广东省广州市 510663)
0 引言
模块化多电平换流器(modular multilevel converter,MMC)[1-3]因其输出波形质量高、模块化、电压功率易扩展等优点,广泛应用于国内外各大柔性直流输电工程[4-6]。近年来,不断出现新型MMC子模块[7-10],其中双钳位子模块(clamp double submodule,CDSM)不仅具备直流故障穿越能力,而且器件利用率高。因柔性直流电网不断提高的直流故障快速清除能力和经济性需求,CDSM 的应用前景良好。随着柔性直流工程对MMC 传输能力要求不断提高,需要更多的CDSM。然而,双钳位子模块型模块化多电平换流器(CDSM-MMC)不仅结构复杂,而且子模块数量庞大,基于详细模型的电磁暂态仿真需要求解超高阶线性方程组,这使得CDSMMMC 详细模型电磁暂态仿真计算量庞大、计算速度缓慢。因此,亟须研究兼顾高精度与高效率的CDSM-MMC 仿真方法。
文献[9-12]提出从半桥子模块(half-bridge submodule,HBSM)演化出的一种CDSM 拓扑,介绍了其运行原理,并通过直流极间短路故障仿真验证了其快速清除直流故障的能力。但由于缺乏高效的CDSM-MMC 电磁暂态仿真模型,仅使用电平数为21 电平的算例,且仿真用时长、效率低。
文献[13]对现有的平均值模型、桥臂等值模型进行了综述,这类模型简化程度高、计算速度快,但忽略了MMC 的内部结构。因其不能计及开关管开关损耗和子模块内部动态特性,适用性有限。
文献[14-15]提出了基于HBSM 或全桥子模块(full-bridge sub-module,FBSM)的MMC 戴维南/诺顿等值模型。在此基础上,文献[16-17]提出一种CDSM 电磁暂态等效模型。该模型根据MMC 不同的工作状态,将一个CDSM 等效为两个半桥子模块的戴维南/诺顿等值模型进行串并联。基于文献[14-15],文献[18-19]提出一种可适用于各类MMC子模块的通用建模方法。然而,这类戴维南/诺顿等值模型需要对子模块进行等值、合并、反解,且节点导纳阵不恒定,计算效率随子模块拓扑复杂度增加而下降。
文献[20]将半隐式延迟解耦电磁暂态并行仿真方法应用于MMC 的电磁暂态仿真。然而,文献[20]所提及的MMC 子模块拓扑相对于CDSM 较为简单,对MMC 闭锁时处理不充分,且未考虑MMC 闭锁时子模块并联电容过渡过程。本文为扩充半隐式延迟解耦法应用于MMC 建模仿真上的通用性,提高仿真精度,基于半隐式延迟解耦电磁暂态并行仿真方法,建立了计及并联电容过渡过程的高效CDSM-MMC 电磁暂态仿真模型。该模型可以考虑MMC 开关器件的损耗,具有近似详细模型的仿真精度。子模块交直流侧解耦,降低计算规模并可进行并行计算,计算效率高。此外,基于状态变量之间的解耦使得状态变量间不会由于开关动作而突变,无须为抑制数值振荡而在开关动作时切换CDSM 的积分形式,故可以始终保持解耦形式不变。
首先,本文建立了CDSM 子模块的状态空间方程,通过分裂系统矩阵,基于中心积分与梯形积分的面积相似性,构建了计及并联电容过渡过程的CDSM 半隐式延迟解耦模型,根据正常运行和闭锁状态下的开关管状态计算了解耦模型的相应参数;然后,给出了解耦模型的计算时序与流程,并分析了解耦模型特点;最后,通过单端CDSM-MMC 算例验证了本文模型在准确性与计算效率上的优势。
1 CDSM-MMC 拓扑
MMC 拓扑如图1(a)所示[21]。
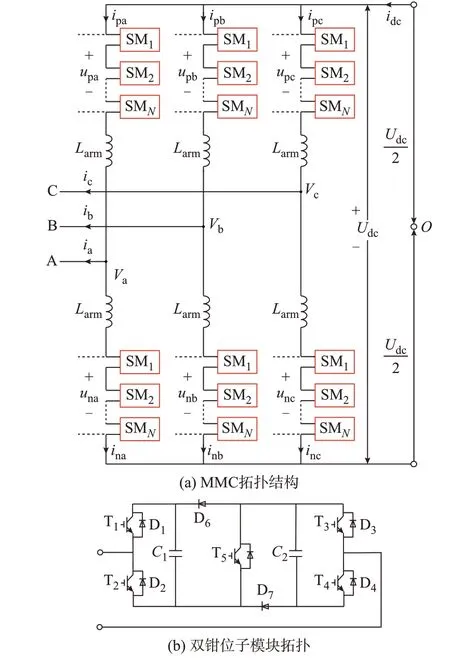
图1 CDSM-MMC 拓扑结构Fig.1 Topology of CDSM-MMC
MMC 通常由6 个桥臂组成,每个桥臂由1 个桥臂电感Larm和N个子模块串联组成。上、下桥臂所有子模块的桥臂输出总电压分别为upj和unj,流经上、下桥臂的电流分别为ipj和inj,三相交流端口输出电压和电流分别为Vj和ij(其中j=a,b,c,表示abc三相),Udc为直流侧电压,idc为直流侧输入电流。
为解决HBSM 无法切断直流故障电流的问题,由HBSM 衍生出CDSM,拓扑结构如图1(b)所示。图中,包含5 组绝缘栅双极型晶体管(insulated gate bipolar transistor,IGBT)T1~T5及与其反并联的二极管D1~D5、2 个独立二极管D6和D7,以及2 个独立的电容C1和C2。
2 CDSM-MMC 解耦模型
文献[20]中的半隐式延迟解耦法由于具有普适性,下文将该方法应用于CDSM-MMC 的解耦,以实现快速、精确的仿真。
为了公式的一致性,本文将MMC 桥臂电感Larm均分至该桥臂N个子模块端口处,即LSM=Larm/N。同时,将每个IGBT 及与其反并联的二极管看成一个开关组,每个开关组采用二值电阻模型,得到CDSM 二值电阻电路,如图2 所示。图中:R1~R7表示开关组的等效电阻;i1~i7表示各等效电阻上流过的电流。
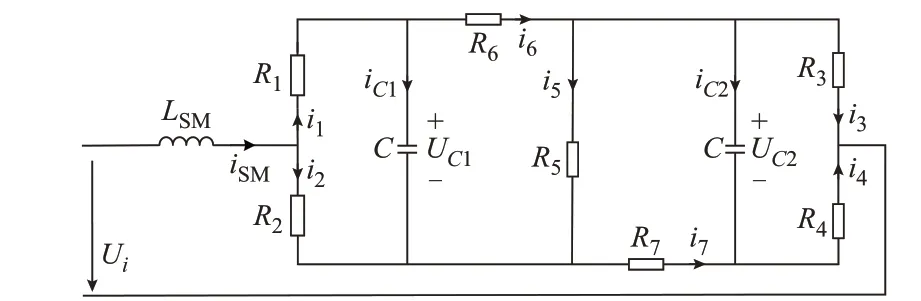
图2 CDSM 二值电阻电路Fig.2 Binary resistance circuit of CDSM
正常工作时,桥臂上、下开关组互补导通和关断,桥臂电阻有如下关系:

式中:Ron和Roff分别为开关组的等效电阻在导通和关断情况下的阻值。
对图2 等效电路列写基尔霍夫电流定律(KCL)、基尔霍夫电压定律(KVL)方程,并化简后得到CDSM 状态空间方程,即
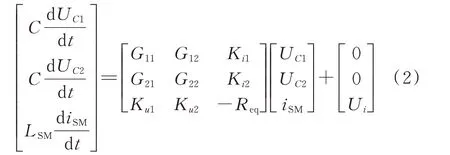
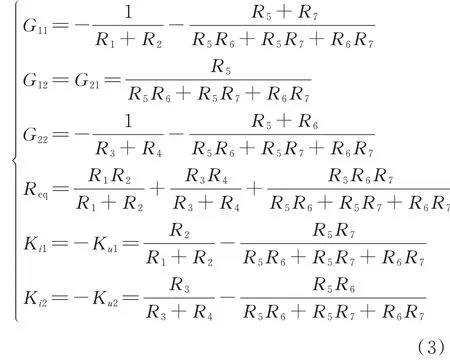
式中:C为子模块电容容值;UC1和UC2分别为CDSM 中两个电容的电压;iSM为流入子模块的电流;Ui为子模块端口电压;Ki1、Ki2、Ku1、Ku2为子模块等效电路中各受控源参数;G11、G12、G21、G22、Req为子模块等效电路中各等效电阻参数。具体如下:
2.1 正常状态时的解耦
当子模块正常运行时(投入/旁路),工作状态如表1 所示。其中,T5保持开通状态,D6和D7反向截止,USM为子模块端口电压。
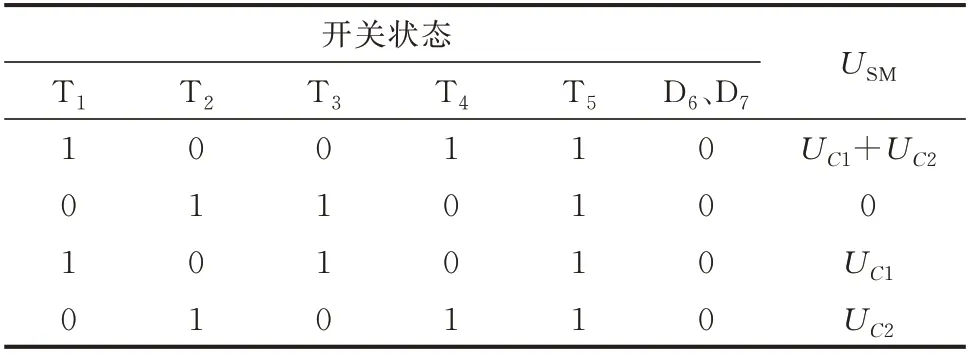
表1 正常状态下的CDSM 开关状态Table 1 On-off states of CDSM in normal state
由于Roff≫Ron,若将Roff看作无穷大,则根据表1 中的开关状态可知:
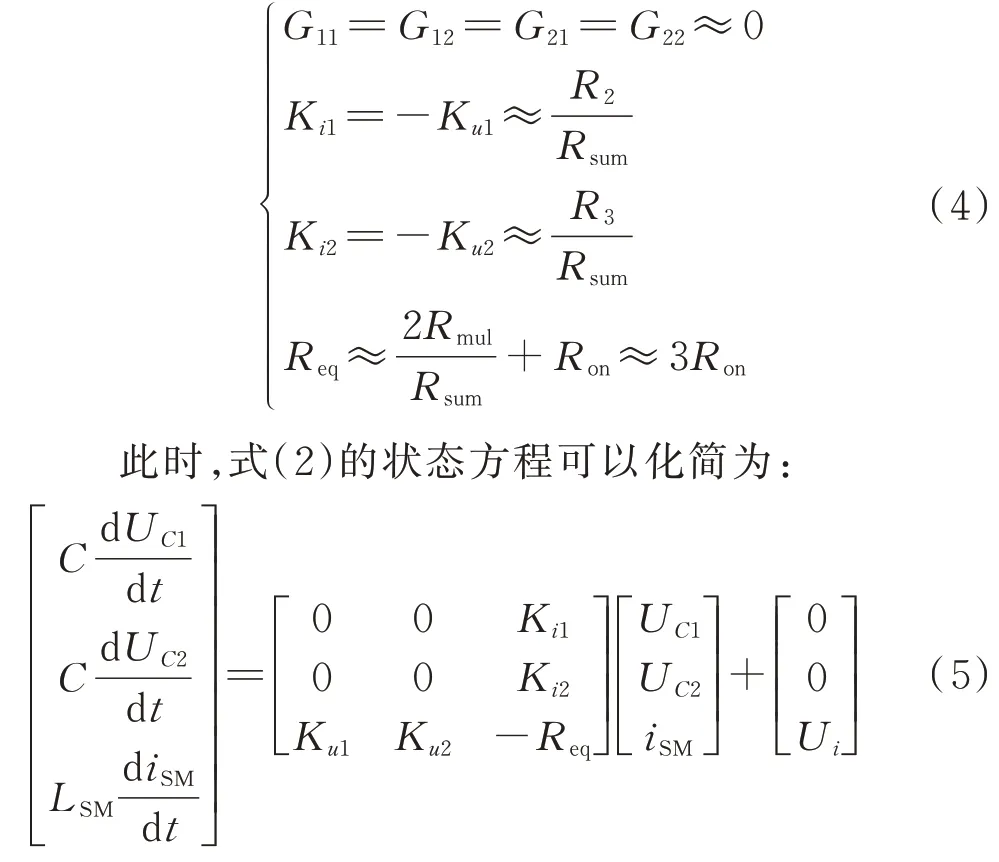
根据半隐式延迟解耦方法原理,对式(5)进行矩阵分裂得:

式中:上标n、n+1、n+1/2、n-1/2 分别表示对应仿真时刻;Δt为仿真步长。
各受控源系数以及相关变量的表达式见附录A式(A1)。由式(7)可得正常状态下CDSM 的解耦模型,如附录B 图B1 所示。
2.2 闭锁状态时的解耦
当MMC 处于闭锁状态时,所有IGBT 关断,根据电流方向分为正向充电、反向充电、高阻态,各工作状态如表2 所示。
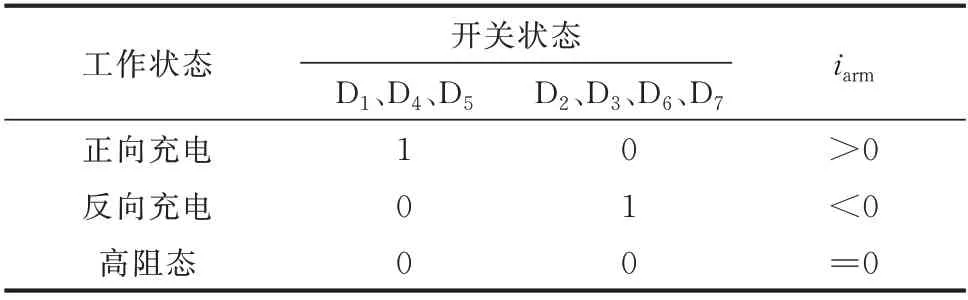
表2 闭锁状态下的CDSM 开关状态Table 2 On-off states of CDSM in blocking state
2.2.1 正向充电
当桥臂电流iarm>0 时,CDSM 处于正向充电状态,D1、D4、D5正向 导通,D2、D3、D6、D7反 向截止,电流通路如图3(a)中红色部分所示。
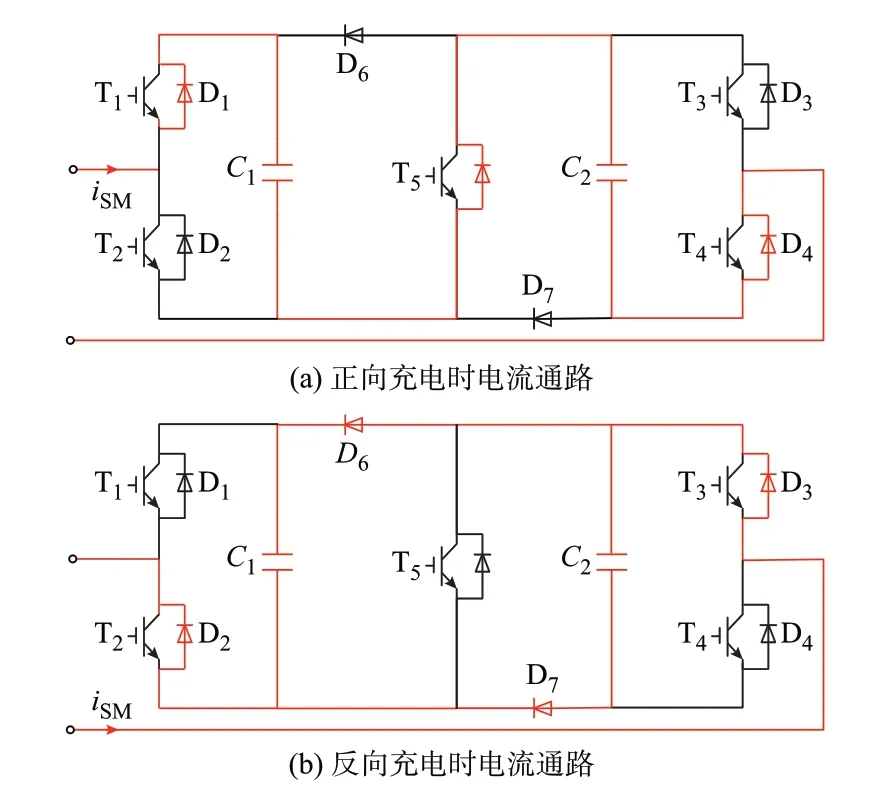
图3 CDSM 闭锁时的电流通路Fig.3 Current path of CDSM in blocking state
此时,若将关断时的开关组电阻看作无穷大,可得
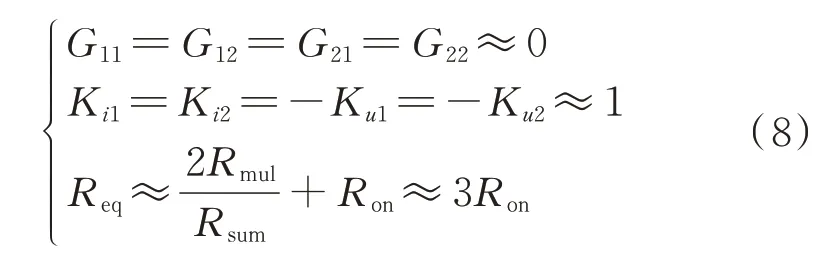
此时,系统状态方程与正常状态下的系统状态方程结构一致。因此,这两种状态下CDSM 的解耦模型相同,如附录B 图B1 所示。此时,等值电压源Ueq=Ku1UC1+Ku2UC2=2UC,等值电流源Jeq1=Jeq2=Ki1iarm=iarm,其中UC为电容电压。
2.2.2 反向充电
当桥臂电流iarm<0 时,CDSM 处于反向充电状态,D1、D4、D5反向截止,D2、D3、D6、D7正向导通。当MMC 从正常状态切换成闭锁反向充电时,子模块内部电流通路如图3(b)所示。CDSM 中的两个电容从串联变成并联,子模块中的两个电容电压可能不相等,会有一个短暂的均压过程,需要考虑并联电容过渡过程。
此时式(2)中的系数为:
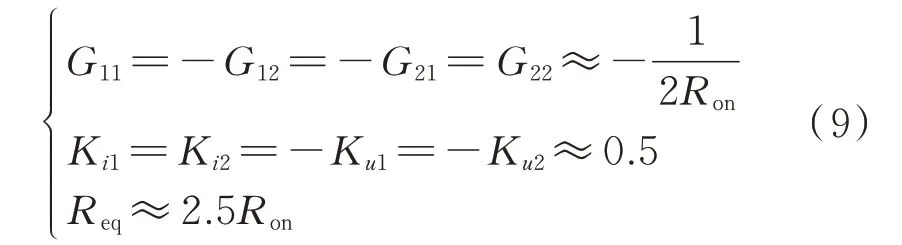
系统状态方程为与式(2)形式相同。可知,根据系统的全响应理论,计及并联电容过渡过程,闭锁反向充电状态的解耦模型如附录B 图B2 所示。图中,A 部分对应零输入响应,两个电容的初始值为进入闭锁反向充电时的电压值;B 部分对应零状态响应,形式与正常状态时的解耦电路相同。此时,交流侧的受控电压源可看作含有内阻,其值为并联均压回路中的电阻(0.5Ron)。
在均压过渡过程结束后,A 部分不再起作用,B部分两个电容上流过的电流相等,解耦电路可以简化为与正常状态下相同的拓扑,如附录B 图B1 所示。此时,Ueq=Ku1UC1+Ku2UC2,Jeq1=Jeq2=Ki1iarm=-iarm/2,Req=2.5Ron。
2.2.3 高阻态
闭锁后,当桥臂电流iarm降到0 时,CDSM 进入高阻状态。此时式(2)中的系数为:
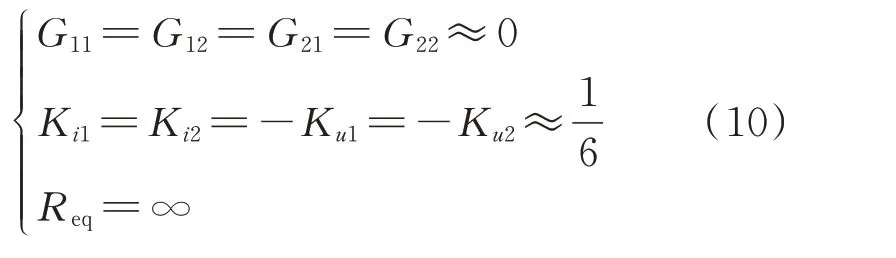
此时,系统状态方程与正常状态下的系统状态方程结构一致。因此,高阻态时CDSM 的解耦模型与正常状态下相同,如附录B 图B1 所示。此时,Jeq1=Jeq2=0,Ueq=Ku1UC1+Ku2UC2。
需要指出的是,如果在PSCAD 中搭建MMC 自定义等值模型,需借助二极管和MMC 自定义等值模型的组合,通过PSCAD 自带的插值功能,获取闭锁时二极管准确的关断时刻,简化数值振荡抑制,类似文献[22]。本文通过编程开发实现解耦模型,可方便地获取二极管关断时刻,故无须使用上述方法。
2.3 单个桥臂的解耦
综合分析上述CDSM 在不同工作状态下的解耦电路,附录B 图B2 代表的子模块全响应解耦模型中,均压过渡过程时间较短,且均压结束后将不再起作用。因此,只要进入各工作状态时设置好相对应的模型参数和电容初值,该解耦模型即可涵盖CDSM 的所有工作状态(各状态下的相应模型参数和电容初值见附录C)。
一般来说,当子模块进入或退出反向充电状态时,在切换时刻需要对电容电压设置相应的初始值。假设当前时刻为tn,此时的各电容电压为UC1a,n、UC2a,n、UC1b,n、UC2b,n。若此时进入反向充电状态,需 令UC1a=UC1b,n,UC2a=UC2b,n,UC1b=UC2b=0。若此时退出反向充电状态,需令UC1b=UC1a,n,UC2b=UC2a,n,UC1a=UC2a=0。其中,UCij(i=1,2;j=a,b)为反向充电时CDSM 解耦电路中各电容电压。
在得到CDSM 的半隐式延迟解耦模型后,将一个桥臂的所有CDSM 桥臂侧解耦电路串联,得到一个桥臂的桥臂侧解耦电路,进而得到单个桥臂的解耦电路,如附录B 图B3 所示。各受控源系数以及相关变量的表达式见附录A 式(A2)、式(A3)。
2.4 解耦模型特点
相比于现有的CDSM-MMC 仿真建模方法,本文提出的解耦模型既能拆分MMC 减小仿真规模,又能实现子系统之间的并行计算。此外,还具有以下特点:
1)相比于平均值、桥臂等值模型、开关函数以及动态相量等模型,本文模型既能计及子模块内部动态特性,又能计及开关器件的导通损耗,具有与详细模型近似的精细度。
2)相比于戴维南和嵌套快速求解法,本文模型反解子模块电容电压时的计算效率高。戴维南和嵌套快速求解法在计算子模块电容电压时,需要先得到子模块端口电压,然后反解子模块内部电容电压,导致计算效率随着子模块内部拓扑的复杂度增加急剧下降。由附录B 图B3 可知,本文模型各子模块间相互解耦,子模块内部等值电路仅由受控电流源和电容并联构成,且含有多个电容时,各电容的等值电路之间也相互解耦(反向充电时有短暂的过渡过程)。因此,求解子模块电容电压时,与子模块内部拓扑的复杂度无关,电路简单、计算量少、仿真效率高。
3)相较于传统方法,本文模型在不同状态下的桥臂导纳矩阵恒定,从而可避免传统方法中,因开关动作导致导纳矩阵变化而不得不频繁LU 重分解带来的巨大计算量,可极大地提高计算效率。
3 计算时序及流程
3.1 计算时序
根据2.3 节中所述的半隐式延迟解耦与并行原理,可以将附录B 图B3 中的CDSM-MMC 解耦电路分为求解子模块电压(U1,U2,…,UN)和桥臂电流Iarm两组,两组之间相隔半个步长交替求解,并且U1,U2,…,UN间可并行求解,计算时序如附录B 图B4所示。
3.2 计算流程
计算流程如图4 所示,其中Ueqs表示桥臂等值电压源,Reqs表示桥臂等值电阻。每次有开关组合状态变化时,要判断是否重新设置电容初始值,电容初始值如何设定已在3.1 节中详细叙述。
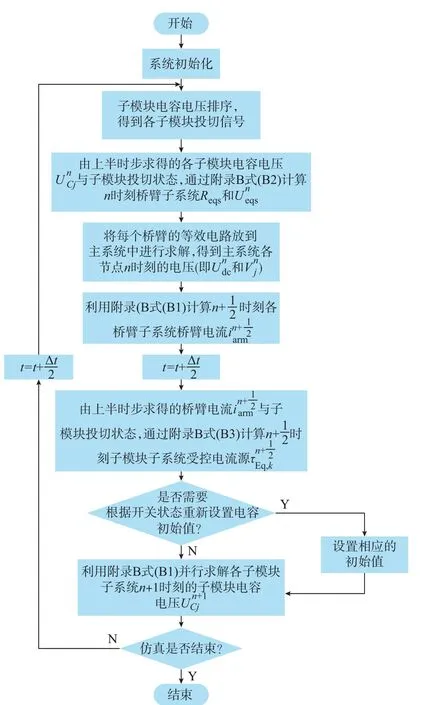
图4 CDSM-MMC 仿真计算流程图Fig.4 Flow chart of CDSM-MMC simulation calculation
4 算例分析
本文编程实现了所提出的解耦模型,并在PSCAD/EMTDC 中搭建了CDSM-MMC 详细模型和戴维南等值模型,将其仿真结果进行对比,从而验证了本文模型具有近似详细模型的精度,且仿真效率提升显著。PC 机硬件配置为:Intel Core i7-9700K CPU(8 核心、8 线程),16 GB RAM。本文算例系统参数如表3 所示,采用单端CDSM-MMC,系统拓扑如图5 所示,图中ZS为交流系统阻抗。由于本文主要针对仿真效率进行研究,对MMC 系统工况和参数研究不够深入,为增强文中算例的比较性,系统参数借鉴了文献[17]和PSCAD 的相关示例。
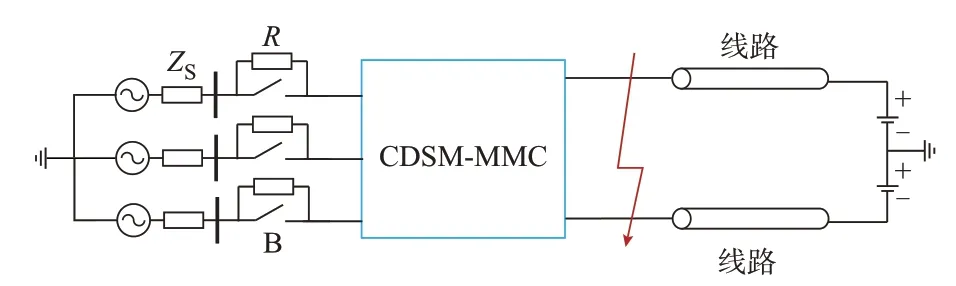
图5 单端CDSM-MMC 系统拓扑Fig.5 Single-ended CDSM-MMC system topology
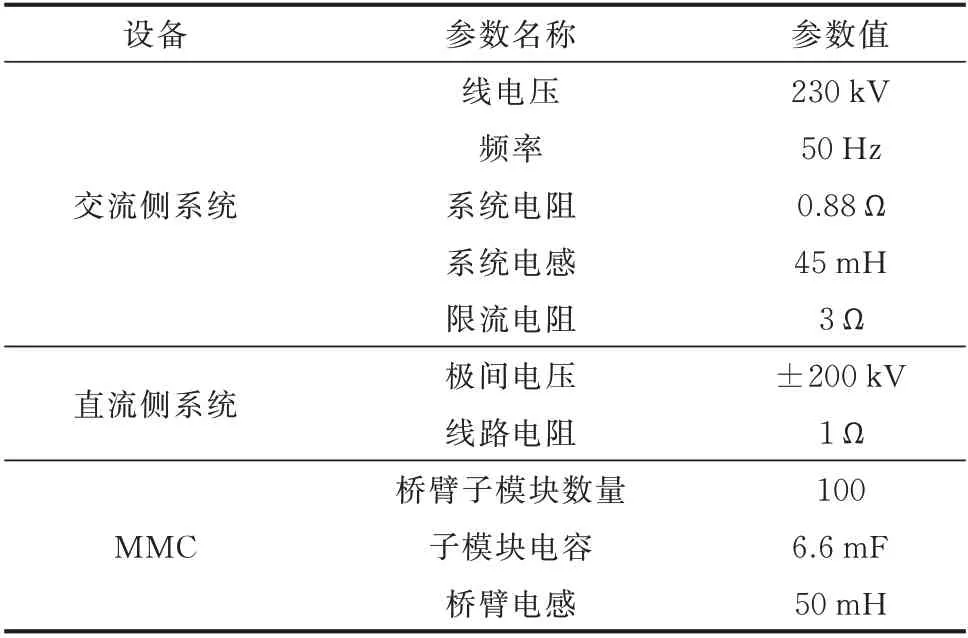
表3 系统参数Table 3 System parameters
仿真运行总时间为2 s,时间节点设置如下:初始时刻,MMC 闭锁,限流电阻未切除;0 s 时仿真开始,交流侧电压上升时间为0.05 s;0.4 s 时MMC 解除闭锁;0.5 s 时切除限流电阻R;1.3 s 时MMC 直流侧发生极间短路故障,故障持续50 ms,故障后5 ms时MMC 闭锁。
4.1 精度对比
本节分别对比了PSCAD/EMTDC 中详细模型和本文所提解耦模型在不同电气量下的仿真精度,并计算了详细模型和本文模型的最大均方根相对误差。仿真步长为5 μs,仿真对比结果如附录B 图B5所示。表4 列出了相关电气量的最大误差情况。从图B5 的仿真结果可以看出,系统各电气量的波形均与详细模型波形吻合。因此,本文提出的模型在稳态与暂态情况下都具备很高的仿真精度,能够保证CDSM-MMC 仿真的准确性。
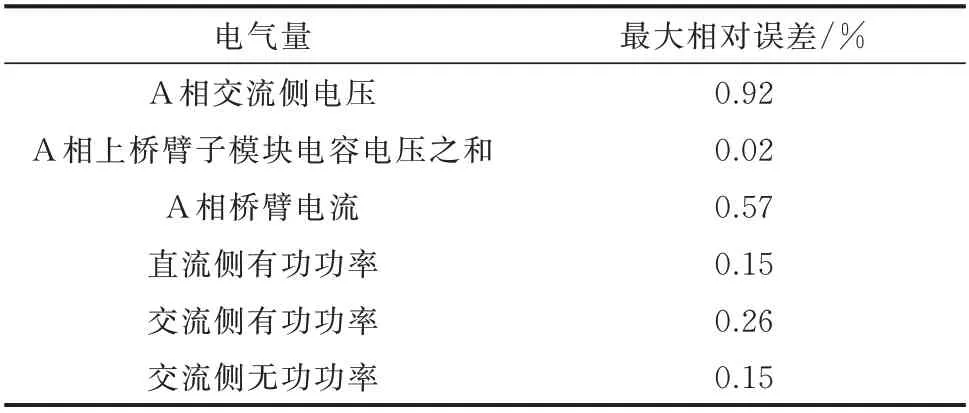
表4 各电气量误差Table 4 Error of each electrical quantity
此外,相较于开关函数模型,本文提出的解耦模型还能准确地保留内部开关损耗信息,故本文模型更精确。附录B 图B6 为41 电平单端CDSM-MMC在仿真步长为5 μs 的情况下,详细模型、半隐式延迟解耦模型以及开关函数模型的交流侧与直流侧的功率比较。从对比结果可以看出,以详细模型为基准,半隐式延迟解耦模型相比于开关函数模型,交流侧的有功和无功功率以及直流侧有功功率误差均小于开关函数模型。
4.2 并联电容过渡过程对比
本节对比了PSCAD/EMTDC 中详细模型和本文所提解耦模型在CDSM-MMC 从正常状态切换到反向充电闭锁状态时,子模块电容过渡过程仿真对比。仿真步长为5 μs,结果如附录B 图B7 所示。
1.3 s 时MMC 直流侧发生极间短路故障,1.305 s 时MMC 闭锁。从附录B 图B7 的仿真结果可以看出,MMC 闭锁前子模块内两电容电压不同,在闭锁后存在短暂的子模块电容均压过程,解耦模型与详细模型子模块电容过渡过程波形吻合。因此,本文提出的模型可以准确模拟出子模块并联电容过渡过程。
4.3 效率对比
本节中未做说明时,默认算例运行时间为2 s,MMC 电平数为41 电平,仿真步长为5 μs。
在不同电平数下,将详细模型、戴维南等值模型和本文所提方法在串行和并行计算方式下的CPU用时进行对比,以验证本文方法的效率,如附录B 图B8 所示。从图中可以看出,随着电平数增加,本文提出的模型加速效果显著。在201 电平时,解耦模型串行计算相较于详细模型加速了3 339.4 倍,相较于戴维南模型也加速了7.5 倍,并且解耦模型并行计算速度更快、加速比更高。在多种仿真步长下,对比详细模型、戴维南等值模型和本文模型仿真的CPU 用时,结果如图B9 所示。从图B9 中可以看出,在不同步长下,本文提出模型相较于详细模型与戴维南等值模型加速明显。
从附录B 图B8、图B9 中可以看出,得益于导纳矩阵恒定和细粒度解耦,本文模型相较于现有方法可以极大地提高CDSM-MMC 的仿真效率。此外,由于本文实验所用的CPU 核心数远小于解耦后的子系统数,这使得解耦模型并行计算的优势无法充分发挥,限制了其加速比。若使用计算单元更多的图形处理器(graphics processing unit,GPU)进行计算,且合理分配计算任务,理论上可以进一步提高仿真速度。
5 结语
本文应用半隐式延迟解耦电磁暂态仿真方法,建立了计及并联电容过渡过程的CDSM 解耦模型,进而得到了单端CDSM-MMC 解耦模型,并给出了解耦模型的计算时序与流程。
该模型考虑了子模块开关管导通损耗和电容充放电特性,并计及了并联电容过渡过程,能够精确模拟出正常运行状态到闭锁之间的转换过程,具有近似详细模型的仿真精度。同时,解耦模型可拆分MMC 减小仿真规模,实现子系统之间的并行计算。在不同状态下,本文模型的桥臂导纳矩阵恒定、子模块电容电路简单,且节点数少于采用戴维南等值法的电容电压反解电路,这使得本文模型具有很高的仿真效率。
通过详细模型、戴维南等值模型以及解耦模型仿真波形对比,验证了本文提出的模型能够精确模拟并联电容过渡过程,具有近似详细模型的精度。随着子模块数量增多,仿真加速比显著上升,表明在子模块数越多的情形下仿真效率越高。对CDSMMMC 详细模型仿真规模大、矩阵维数高、仿真速度慢的问题提供了一种快速、高效的解决方案。
考虑到本文未对所提出模型的稳定性进行分析,未来需要进一步完善。同时,由于本文模型具有导纳矩阵恒定和细粒度解耦等特点,适用于基于现场可编程门阵列(field programmable gate array,FPGA)的实时仿真,未来可以进一步实现CDSMMMC 系统的实时仿真和半实物仿真。
本文研究得到了CloudPSS 平台提供的测试支持,特此感谢!
附录见本刊网络版(http://www.aeps-info.com/aeps/ch/index.aspx),扫英文摘要后二维码可以阅读网络全文。
猜你喜欢
中学生数理化·中考版(2021年10期)2021-11-22
中风与神经疾病杂志(2021年10期)2021-01-03
湖南大学学报(自然科学版)(2020年12期)2020-12-30
防爆电机(2020年5期)2020-12-14
中国实用神经疾病杂志(2018年9期)2018-05-25
中国环境监察(2016年7期)2016-10-23
通信电源技术(2016年1期)2016-04-16
通信电源技术(2016年5期)2016-03-22
心理学探新(2015年1期)2015-12-27
中国考试(2015年4期)2015-01-30
