
基于距离矢量的多传感器信息决策算法
2022-01-25 06:49张凌飞陈博行
现代电子技术 2022年1期
张凌飞,马 俊,陈博行
(1.青海师范大学 计算机学院,青海 西宁 810008;2.青海民族大学 物理与电子信息工程学院,青海 西宁 810007)
0 引 言
随着5G时代的到来,加速促进“万物互联”进程,传感器网络作为机器感知世界的重要媒介,其安全性、智能性、先进性直接影响着社会的发展与进步。一个完整的传感器网络通常由多个传感器节点组成,这些传感器节点看似独立,实际由于监测范围、方式和对象等的关联性,各数据之间有潜在的内在联系,信息决策正是利用这种内在联系,通过算法自动决策出相对正确的结果,为科学研究做出参考。
文献[6]针对冲突证据决策存在的问题,提出了一种基于二次组合的证据决策方法,通过仿真分析,该方法能够较好地解决证据冲突问题,且计算量减少了5~10 dB;文献[7]提出了一种基于混合权重距离的毕达哥拉斯模糊TOPSIS的多属性决策方法,该方法可通过调节提高算法的应用范围;文献[8]针对属性权重完全未知的混合型多属性决策问题,提出了基于前景理论和证据理论的混合型多属性决策方法,经过分析该方法有较强的区分能力;文献[9]使用SVDD方法改进D⁃S证据理论,并建立两级融合模型进行验证,实现多等级、多层次的诊断,结果表明该诊断方法正确率高达93%;文献[10]提出了一种基于证据理论和群体决策的综合信息融合方法,根据焦点元素一致性函数调整合取和析取规则的权重,经仿真对比,该方法可以获得合理可靠的决策结果;文献[11]针对D⁃S证据理论的冲突问题,提出了一种基于置信度的证据理论的改进策略,算法采用4个神经网络的初步预测值提取权重,合理构造了BPAs函数,并通过实例验证了该系统的应用效果;文献[12]针对D⁃S证据理论存在的高冲突,通过对相似性Jaccard系数矩阵分块化处理,计算各传感器节点的权值修正证据源,以降低D⁃S证据理论决策风险;文献[13]针对CPSs提出了基于模糊集和D⁃S证据理论的数据融合算法,该算法首先采用模糊集理论和属性权重确定证据的分布,并将属性证据的数据融合与CPSs中传感器节点的可信度相结合。以上决策方法计算过程较为复杂,大多在算法中需对传感器采集数据进行概率赋值,且较少考虑传感器自身特点和评价标准。本文充分利用监测系统中传感器数据评价等级范围,结合实际测量值,利用实际值与标准值之间的距离计算各传感器数据间的支持度,最终得出系统决策结果。
1 多传感器信息决策模型
图1为多传感器信息决策模型。由图1可知,决策过程中充分利用了系统评价标准,根据已知评价标准与各传感器节点采集数据对应的实际值做比较,得出相应的距离差,再将各评价标准对应的距离差求和,得到后者对前者的支持度,通过数据处理算法得出各组决策结果的优势度,取优势度最大作为决策的输出结果。

图1 多传感器信息决策模型
2 算法原理
2.1 单属性信息融合算法
图2为一维传感器信息决策原理图。假设在某监测系统中使用同类传感器进行测量,系统预设有4个评价等级,评价等级一的取值范围为±Δ,其余3个评价等级的取值范围如图2所示。设为传感器实际测量值,计算到各取值范围中心值的距离的绝对值,取最小绝对值所在的评价等级范围作为最终决策结果。图2的决策结果为“决策结果二”。

图2 单属性信息决策原理图
2.2 多属性信息融合算法
多属性信息决策原理如图3所示。其中,,…,为“决策结果一”对应的各传感器取值范围的中心值,同样,,,…,为“决策结果二”对应的各传感器取值范围的中心值,,,…,为第一组实际测量值。将单属性决策方法横向扩展到多属性信息决策,纵向计算实际测量值与标准决策范围中心值的距离矢量的模,横向计算各决策结果对应距离矢量模之和,该值越小,表明计算结果越接近该决策结果。

图3 多属性信息决策原理图
3 基于距离矢量的多传感器决策算法
定义1:在某评价系统中共有个评价等级,传感器共个,每个等级对应的第个传感器的取值范围为a ±Δt ,其中心值为a ,则等级可用向量G =(a ,a ,…,a )表示。
定义2:设每个传感器测量的最大值为max(a ),最小值为min(a ),实际测量值为向量=(,,…,b ),且min(a )≤b ≤max(a )。
定义3:设N 为评价对各个传感器测量值的支持度,φ=(A ,A )=b -a ,表示测量值b 到评价a 的距离,其中,≤,≤。
则得支持度矩阵为:

由式(1)得支持度函数:

定义4:归一化处理。


优势度函数结果为:

定义5:根据定义1~定义4的计算方案,得规范化函数为:

对S 计算结果进行排序,取max{S }为最优解方案,即此时S =1。
定义6:设为区分度函数,则:


4 仿真算例
例1:假设现要对某一水域的温度进行分级,评价标准如表1所示。采用温度传感器对其进行测试,设测得当前水域温度为15℃。

表1 温度评价标准 ℃
由表1可得表2规范化函数计算结果。

表2 规范化函数计算结果
对S 计算结果进行排序,取max{S }为最优解方案,即该水域为三级。由式(6)得区分度为0.571 4。
例2:假设现要对某一水域污染情况进行综合评价,评价标准如表3所示。传感器节点采集水质环境参数(温度、p H、浑浊度、电导率),实际测量结果分别为:12℃,7.5,20%,0.4。
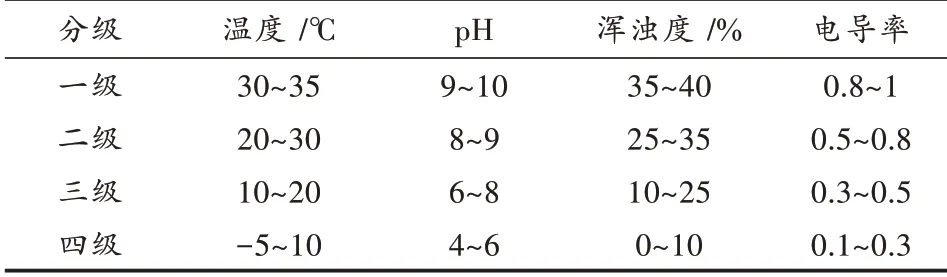
表3 水域污染评价标准
由表3得:

得支持度矩阵为:

由式(2)~式(4)得:

由式(5)得:

对S 计算结果进行排序,取max{S }为最优解方案,即该水域为三级,符合常理。
例3:与D⁃S证据理论进行比较,设某识别框架为,,对应证据的评价标准,如表4所示,实际传感器测量值为60,38,1.5,4.8,根据实测值进行基本概率分配,如表5所示。表6为两种方法融合结果对比。

表4 例3识别框架下评价标准

表5 例3识别框架下证据数据

表6 不同方法融合结果对比
分析表6中数据可知:当证据数小于等于3时,各证据表明识别结果为的可能性最大,与本文方法结果相同;当证据数为4时,D⁃S证据理论判断结果受基本概率分配影响较大,与事实相悖,不具备参考价值,而本文方法识别结果为,符合常理。为进一步比较两种方法,分别计算两种方法的区分度,如表7所示。

表7 两种方法的区分度
由表7可知,两种方法的区分度均达到了0.5以上,证据数为4时,采用本文方法的计算结果区分度达到了0.779 6,而D⁃S证据理论由于决策结果与事实相悖,失去可比性。
5 结 语
本文提出了一种基于距离矢量的多传感器信息决策算法。对多传感器信息决策模型做了简要介绍,从单属性与多属性决策角度分析了该决策方法原理,通过对单属性决策的纵向与横向运算将其扩展至多属性决策;定义了中心值向量、实际测量值向量以及支持度矩阵,其次,经归一化处理,得出优势度函数,规范化对决策结果进行排序,取值最大为最优解方案;最后,为方便算法评价优劣,定义了区分度函数。经仿真案例分析表明,本文方法在传感器信息决策中有良好的决策效果,且区分度均达到了0.5以上,通过与D⁃S证据理论比较可知,本文方法可有效避免D⁃S证据理论在决策时出现相悖的情况,相对于在决策过程中需对初始传感器数据进行概率赋值,具有明显优势。
猜你喜欢
纺织科学研究(2021年9期)2021-10-14
中学生数理化·七年级数学人教版(2019年6期)2019-06-25
中国校外教育(2019年12期)2019-04-15
江淮论坛(2018年4期)2018-08-24
红土地(2016年3期)2017-01-15
福建中学数学(2016年5期)2016-11-29
幼儿智力世界(2016年6期)2016-05-14
发明与创新(2016年33期)2016-04-16
心理学探新(2015年3期)2015-12-27
小雪花·初中高分作文(2015年10期)2015-10-24
