弯曲气动肌肉驱动手腕康复装置的设计与研究
2022-01-17 01:58韩坤峰刘艳红毛晓波张季冬
郑州大学学报(工学版) 2022年1期
韩坤峰, 刘艳红, 毛晓波, 张季冬, 王 葳, 逯 鹏,3
(1.郑州大学 电气工程学院,河南 郑州 450001; 2.机器人感知与控制河南省工程实验室,河南 郑州 450001; 3.中医药智能科学与工程技术研究中心,河南 郑州 450001)
0 引言
脑卒中患者往往出现偏瘫后遗症,会引起腕部运动功能障碍。智能康复训练系统是一种综合了康复医学、机器人学、电子工程为一体的智能康复方法,能够部分或完全恢复患者丧失的运动能力。国内外设计开发了多种腕关节康复训练系统,包括电机驱动型和气动驱动型。
电机驱动腕部康复装置常以腕关节生理结构为基础,设计贴合腕关节的机械结构,带动患侧手腕进行康复运动,具有运动精确度高、输出扭矩大等优点,但同时存在结构较复杂、柔顺性不足[1]等缺点。Lambelet等[2]设计了一种腕部外骨骼康复装置,结合表面肌电信号,通过按需辅助的力控制策略实现患者的主动训练。该装置需要将电机佩戴在手臂上,会增加外骨骼装置的重量,降低用户的舒适度,且针对不同用户的适配性较低。Martinez等[3]设计了一种三自由度腕部康复装置,具有3个转动关节,分别对应前臂旋转、腕部背伸/屈曲,腕部内收/外展,并设置物理急停按钮以确保训练过程安全。该装置结构较为复杂,相较于气动腕关节康复装置,柔顺性较低。
柔性驱动器因其较好的安全性与柔顺性,在医疗康复领域受到广泛关注[4]。其中气动人工肌肉(pneumatic artificial muscle,PAM)具有功率/质量比大、噪声低、质量轻等特点,将其应用于腕关节康复装置,具有动作平滑、柔顺性好等优点。
姚建涛等[5]设计了柔性可穿戴腕部动力手套,采用4条直线型PAM辅助患者完成腕部背伸/屈曲、内收/外展运动。该装置需要结合刚性串联连杆结构,舒适度较低,且其采用电机驱动、齿轮传动结构,增加了装置重量,降低了用户的舒适度。Andrikopoulos等[6]设计了一种PAM驱动的腕关节康复机器人,采用非线性PID控制算法对腕关节运动训练轨迹进行跟踪控制。该装置采用刚性串联连杆结构,降低了用户的舒适度。Al-Fahaam等[7]开发了一种PAM驱动的手腕康复手套,将伸张PAM和收缩PAM固定于软手套背部,能够实现手腕康复训练。该康复手套需要将PAM首尾两端牢牢固定在使用者身上,舒适度较低。
弯曲收缩PAM作为腕关节外骨骼康复装置的执行机构,相较于电机驱动方式,柔顺性好,能够避免系统急剧变化的冲击力对腕关节造成的二次损伤;相较于直线型PAM,能够避免结合刚性串联连杆机构,且无须牢牢地固定在使用者身上,提升了装置的适配性与用户的舒适度。
综上,以辅助患者完成腕关节背伸/屈曲运动和腕关节内收/外展运动康复训练为目的,设计实现弯曲收缩PAM驱动的手腕康复装置,阐述了其关键技术路线以及核心实现方式,以期为手腕康复训练系统提供设计思路。
1 弯曲收缩PAM
弯曲收缩PAM基于PAM结构改进而来,安全、柔顺且制作成本低,具有广泛的应用前景与价值[8]。
1.1 收缩PAM
收缩PAM是由内部橡胶筒套及外部纤维编织网构成[9]。PAM外层为内径10 mm、长度200 mm的尼龙编织网,内层为内径8 mm、长度200 mm的双层乳胶气球,两端密封,其中一端嵌入一个进气软管。PAM在不同气压下收缩情况如图1所示。PAM在空载情况下内部压强与收缩量如图2所示。

图1 PAM在不同气压下收缩情况Figure 1 PAM contraction under different air pressures

图2 PAM空载下收缩量随气压变化曲线Figure 2 Change curve of PAM contraction with air pressure under no load
1.2 弯曲收缩PAM
弯曲收缩PAM结构示意如图3所示。弯曲收缩PAM外层为内径10 mm、长度150 mm的尼龙编织网,内层为内径8 mm、长度150 mm的双层乳胶气球,两端密封,其中一端嵌入一个进气软管。弯曲收缩PAM一侧用热熔胶固定其长度,当弯曲收缩PAM内部充入气体时,热熔胶侧长度保持不变,另一侧收缩,产生弯曲收缩力。

图3 弯曲收缩PAM结构示意图Figure 3 Schematic diagram of bending and contracting PAM structure
弯曲收缩PAM在不同气压下弯曲情况如图4所示。

图4 不同气压下的弯曲收缩PAMFigure 4 Bending and contracting PAM under different air pressures
弯曲收缩PAM在空载情况下与2.94 N负载情况下气压与弯曲角度(肌肉末端相对于初始位置的角度)关系如图5所示。
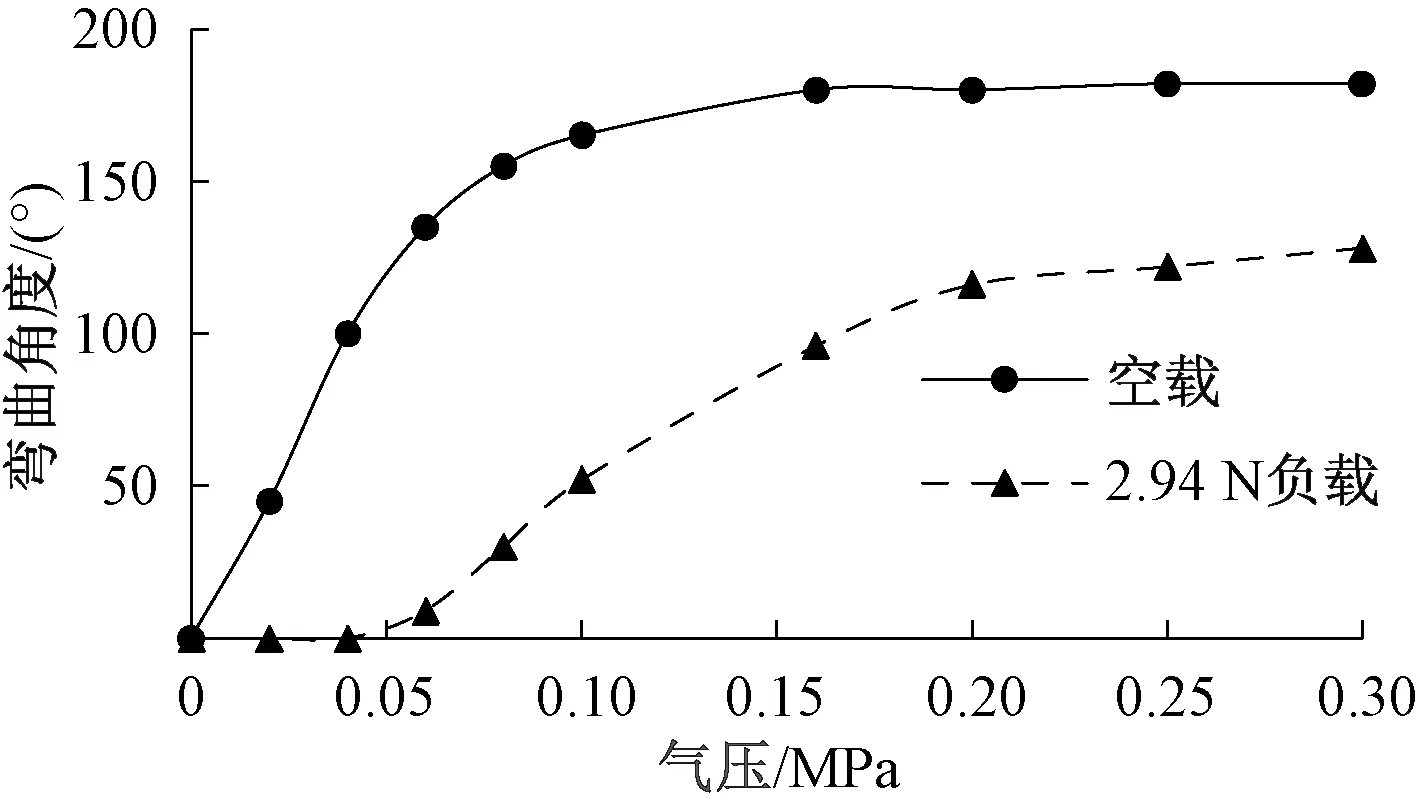
图5 弯曲收缩PAM不同负载下弯曲角度随气压变化曲线Figure 5 Curve of bending angle of bending and contracting PAM with air pressure under different loads
弯曲收缩PAM末端输出力测量装置原理如图6所示,实际测试如图7所示。将称重传感器底端固定于实验平台,用尼龙扎带将弯曲收缩PAM末端和称重传感器一侧固定,用胶将弯曲收缩PAM首端固定于实验平台侧面,使其与弯曲收缩PAM末端呈90°方向。将弯曲收缩PAM内部充入气体,逐步增大压强,称重传感器将测得的输出力传给微控制器,经处理后传送给上位机,从而记录弯曲收缩PAM的末端输出力变化。
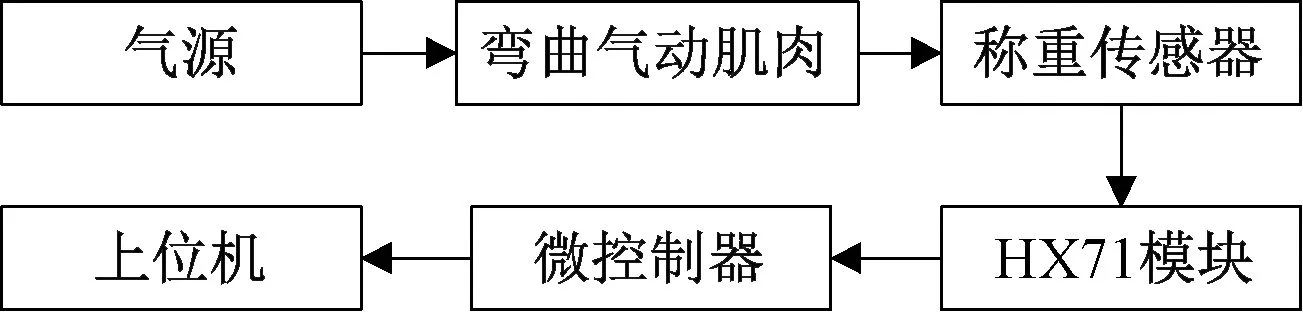
图6 弯曲收缩PAM末端力测试示意图Figure 6 Schematic diagram of bending and contracting PAM end force test

图7 弯曲收缩PAM测试Figure 7 Bending and contracting PAM test
将弯曲收缩PAM首端与末端呈45°方向固定于实验平台,重复上述步骤,测试并记录其末端输出力,如图8所示。
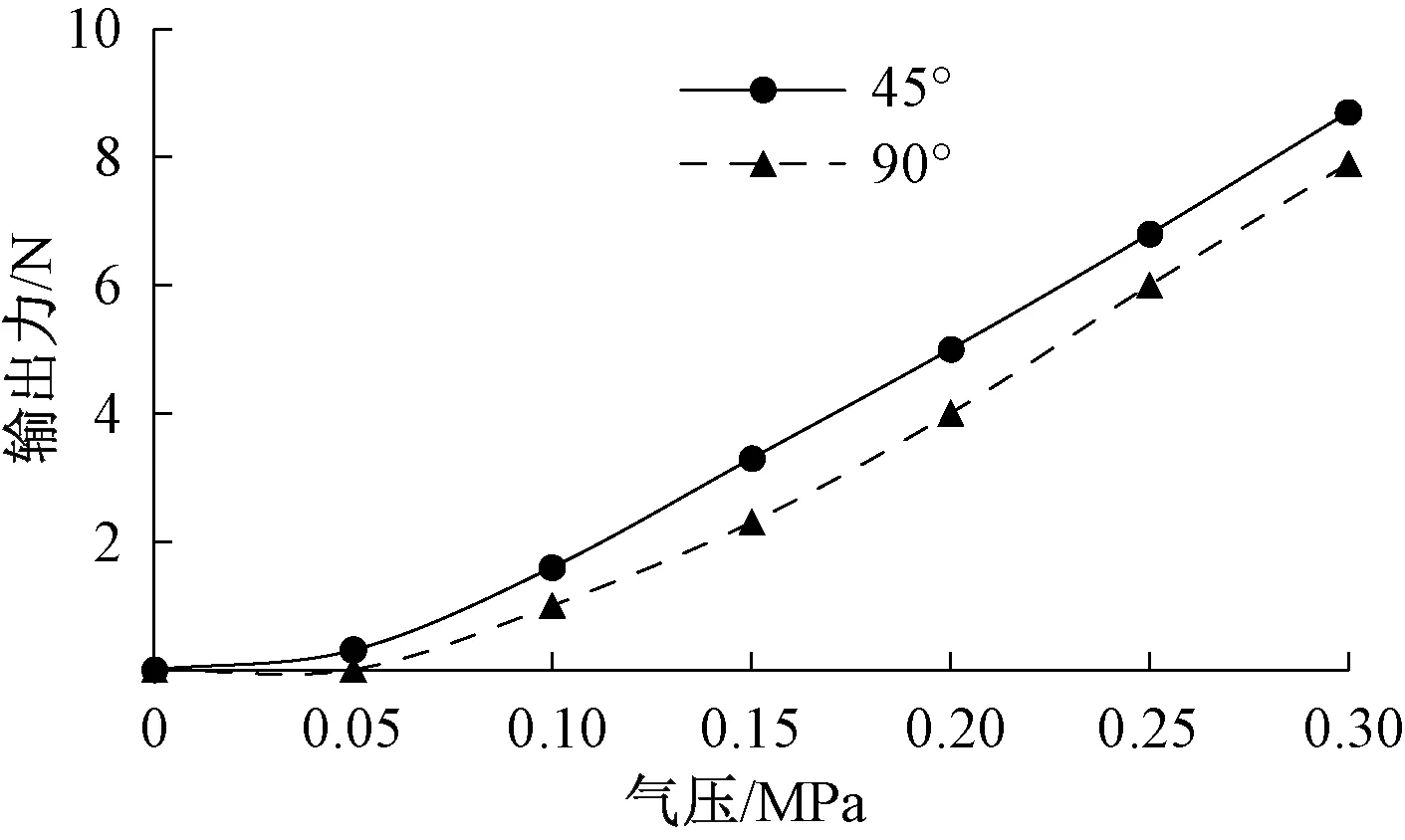
图8 不同弯曲角度下末端输出力随气压变化曲线图Figure 8 Curve of output force with air pressure under different bending angles

图9 McKibben PAM形状Figure 9 McKibben PAM shape
2 弯曲收缩PAM运动学建模
参考Al-Fahaam等[10]建立的弯曲伸长PAM运动学模型,对弯曲收缩PAM进行运动学建模,以期为弯曲收缩PAM的精准控制奠定基础。
McKibben PAM形状如图9所示。PAM的长度为L,直径为D,单根编织线与PAM中心轴之间的角度为θ。多根长度为b的编织线缠绕PAMn次形成编织网。
基于以下假设:
(1)弯曲收缩PAM在弯曲期间,其横截面保持圆形;
(2)弯曲收缩PAM在弯曲期间,其固定侧长度保持不变;
(3)不考虑尼龙编织网和乳胶气球之间的摩擦力,不考虑编织线之间的摩擦力,不考虑乳胶气球的弹力;
(4)弯曲收缩PAM内部气体无泄漏。
弯曲收缩PAM初始长度为
L=bcosθ。
(1)
弯曲收缩PAM直径为
(2)
弯曲收缩PAM形状如图10所示。弯曲收缩PAM固定侧长度为L1,自由侧长度为Ln,直径为Dc,弯曲角度为α,内半径为rn,外半径为r1,弯曲收缩PAM的平均长度Lc为
(3)
弯曲收缩PAM直径Dc为
Dc=r1-rn。
(4)
图10 弯曲收缩PAM形状Figure 10 Bending and contracting PAM shape
当弯曲收缩PAM内部充入气体,由于固定侧长度保持不变,这一侧编织角始终为最小值θmin,而PAM另一侧随内部压强增大而收缩,这一侧编织角θ也随之增加。
弯曲收缩PAM固定侧长度L1与自由侧长度Ln为
L1=bcosθmin=r1α;
(5)
Ln=bcosθ=rnα。
(6)
弯曲收缩PAM在内部压强作用下弯曲时,其横截面形状如图11所示,A点为PAM固定侧。假设弯曲收缩PAM横截面为圆形,其直径Dc为弯曲收缩PAM固定侧半径r2和自由侧半径r3之和。
图11 弯曲收缩PAM横截面形状Figure 11 Cross-sectional shape of the bending and contracting PAM
弯曲收缩PAM直径Dc的计算过程为
(7)
(8)
Dc=r2+r3;
(9)
(10)
将式(4)代入式(6),得
Ln=(r1-Dc)α。
(11)
将式(5)和式(6)代入式(11),得

(12)
将式(5)代入式(12),得弯曲收缩PAM的弯曲角度α为
(13)
将式(5)和式(6)代入式(3)中,得弯曲收缩PAM的平均长度Lc为
(14)
3 手腕康复装置
3.1 需求分析
依据腕关节生理结构和运动特性,在满足系统安全、可靠的前提下,手腕康复训练系统的功能包括:
(1)实时监测手腕运动角度和位置信息,为康复训练和评价提供客观反馈数据;
(2)能够辅助患者完成康复训练运动,即腕关节背伸/屈曲运动和腕关节内收/外展运动;
(3)通过上位机实时显示患者康复训练信息,识别患者语音指令。
以辅助脑卒中腕部运动功能障碍患者完成腕关节康复训练为核心目的,从安全、可靠、交互与舒适方面考虑,手腕康复训练系统的性能需求包括以下3点。
(1)安全性。患者在康复训练中有发生肌肉痉挛等突发情况的概率,需要防止突发情况造成腕关节二次损伤。
(2)可靠性。康复训练装置以辅助腕关节运动功能障碍患者完成康复训练为目的,因此系统的可靠性应符合较高要求。
(3)舒适性。外骨骼康复装置是和患侧腕部直接接触[11],在康复训练过程中,需要结合腕关节生理结构和运动特性,对外骨骼康复装置进行设计,以满足舒适性要求。
3.2 系统总体设计与实现
结合上述系统需求分析,设计手腕康复装置,总体设计如图12所示,包括外骨骼康复手套、控制系统、感知系统和交互系统。外骨骼康复手套采用PAM作为执行机构,柔顺性好,能够避免系统急剧变化的冲击力对腕关节造成二次损伤;控制系统包括嵌入式微控制器和气路控制系统,具有良好的便携性;感知系统通过角度传感器实现对腕关节角度信息的实时采集;完成了人机交互界面设计和语音识别系统开发,实时显示手腕康复训练过程的运动信息并进行康复训练模式的选择,语音交互采用LD3320语音芯片,能够实现实时语音控制。
图12 系统总体设计图Figure 12 System overall design diagram
系统装置如图13所示。包括外骨骼手套、信息采集模块、控制系统与交互系统。信息采集模块为角度传感器MPU6050;控制系统包块嵌入式微控制器、微型充气泵、气泵驱动、电磁阀、电磁阀驱动、按键开关与电源模块;交互系统包括上位机监控界面和语音模块LD3320。
图13 系统装置图Figure 13 System device diagram
嵌入式微控制器实时接收下位机按键指令、上位机控制指令以及语音指令,通过控制微型气泵的启停与电磁阀的通断来控制弯曲收缩PAM内部压强,进而带动患者手腕进行康复运动训练。
3.3 控制系统设计
气路控制系统设计如图14所示。嵌入式微控制器通过电机驱动控制微型气泵启停,通过电磁阀驱动控制电磁阀通断。角度传感器采集患者康复训练过程中的角度信息,传送给嵌入式微控制器。嵌入式微控制器根据反馈的角度信息,通过控制微型气泵的启停和电磁阀的通断,来控制弯曲收缩PAM内腔的充放气,进而达到给定的弯曲角度。

图14 气路控制系统Figure 14 Gas circuit control system
3.4 外骨骼康复手套
外骨骼康复手套如图15所示。手套本体上下左右各固定一根弯曲收缩PAM,角度传感器型号为MPU6050,将其固定于外骨骼康复手套上表面手背处。外骨骼康复手套能够辅助患者完成腕关节背伸/屈曲运动和内收/外展运动。

图15 外骨骼康复手套Figure 15 Exoskeleton rehabilitation glove
3.5 安全性设计
手腕康复训练装置以辅助脑卒中患者完成康复训练为核心目的,安全性是第一要素。装置的安全性设计包括以下3点:
(1)弯曲收缩PAM测试结果表明,其可承受最大气压为0.4 MPa,装置所采用的微型气泵最大气压为0.3 MPa,从而保障执行机构运行过程中的安全性;
(2)随机抽取3条弯曲收缩PAM,分别进行0~0.3 MPa反复充放气测试,次数为1 000次,未出现损坏情况;
(3)设置物理急停按钮,在出现极端情况或者痉挛状况下,能够及时停止训练并使执行机构维持原状。
4 康复训练实验
在康复医师指导下,选6名身体健康的正常人作为被试,进行模拟康复训练,以测试手腕康复训练系统是否能够长时间安全稳定工作,以及是否满足系统设计要求。
4.1 实验动作设计
选择腕关节背伸/屈曲运动和腕关节内收/外展运动作为实验动作,如图16所示。以腕关节起始位为中立位0°法纪录,腕关节背伸角度为0°~70°,屈曲角度为0°~80°,腕关节内收角度为0°~30°,外展角度为0°~15°。
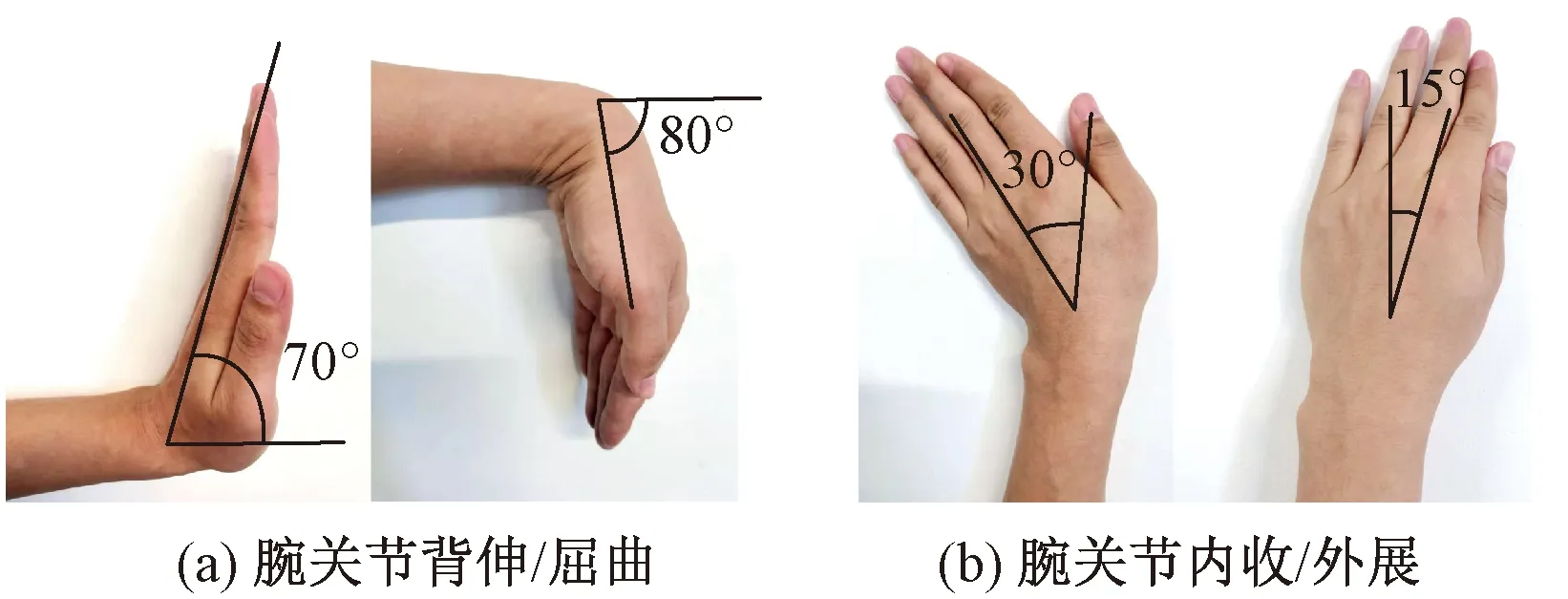
图16 实验动作设计图Figure 16 Experimental action design diagram
4.2 康复运动实验
4.2.1 背伸/屈曲训练
进行腕关节背伸/屈曲运动训练,腕关节运动状态为正常-背伸-正常-屈曲-正常-背伸往复运动。腕关节背伸/屈曲训练如图17所示。

图17 腕关节背伸/屈曲训练Figure 17 Wrist extension/flexion training
测试结果表明,手腕康复装置可以完成正常-背伸-正常-屈曲-正常-背伸往复运动且能达到背伸/屈曲角度要求。
4.2.2 内收/外展训练
进行腕关节内收/外展训练实验,腕关节运动状态为正常-内收-正常-外展-正常-内收往复运动。腕关节内收/外展训练如图18所示。

图18 腕关节内收/外展训练Figure 18 Wrist adduction/abduction training
测试结果表明,手腕康复装置可以完成正常-内收-正常-外展-正常-内收往复运动且能达到内收/外展角度要求。
4.3 实验结果和分析
腕关节背伸/屈曲训练进行5组实验,每组20次背伸/屈曲动作。腕关节实际最大背伸/屈曲角度与设定最大背伸/屈曲角度的误差分析如表1所示。腕关节背伸/屈曲训练角度随气压变化如图19所示。

表1 腕关节背伸/屈曲训练误差分析Table 1 Error analysis of wrist extension/flexion training %

图19 背伸/屈曲训练角度随气压变化曲线Figure 19 Curve of extension/flexion training angle with air pressure
腕关节内收/外展训练进行5组实验,每组20次内收/外展动作。腕关节实际最大内收/外展角度与设定最大内收/外展角度的误差分析如表2所示。

表2 腕关节内收/外展训练误差分析Table 2 Error analysis of wrist adduction/abduction training %
结果表明,测试误差在10%内,弯曲PAM驱动的手腕康复装置满足系统设计要求。
5 结论
将弯曲收缩PAM应用于腕关节外骨骼康复装置,相较于电机驱动方式,柔顺性好且能够避免系统急剧变化的冲击力对腕关节造成的二次损伤;相较于直线型PAM,能够避免结合刚性串联连杆机构,且无须牢牢地固定在使用者身上,提升了装置的适配性与用户的舒适度。
以实现患者的柔顺训练为切入点,以辅助患者完成腕关节背伸/屈曲运动和腕关节内收/外展运动康复训练为目的,设计并实现手腕康复装置,重点解决了柔性驱动器设计与建模、外骨骼康复手套设计、控制系统设计和数据传输等一系列工程技术问题。测试结果表明,手腕康复装置能够有效驱动手腕进行康复训练,满足系统设计要求。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
中国典型病例大全(2022年9期)2022-04-19
医学概论(2021年19期)2021-01-21
中西医结合心血管病电子杂志(2020年17期)2020-07-20
现代养生·下半月(2019年9期)2019-11-12
轻兵器(2019年5期)2019-06-21
艺海(2017年6期)2017-09-30
现代兵器(2017年4期)2017-06-02
中外会展(2016年7期)2016-09-21
大众健康(2016年3期)2016-05-31