基于YOLOV3 的改进目标检测识别算法
2022-01-06 01:12:02王战涛王晓田
上海航天 2021年6期
王战涛,张 策,王晓田
(1.中国人民解放军95889 部队,甘肃 酒泉 735018;2.西北工业大学 航天学院,陕西 西安 710072)
0 引言
红外目标检测识别一直是国内外计算机视觉技术研究的热点问题,经过近几十年不断的研究和发展,其在侦察、导弹制导、安防检测及医学影像等领域上取得了卓越成就和广泛应用。由于红外成像技术能在全天候进行清晰成像显示,在一些恶劣的天气状况下也能有很好的抗干扰能力,因而得到快速发展,已经成为精确制导武器的主要研究方向之一。
随着人工智能理论与技术的发展,深度学习技术及相应的一些神经网络模型有着很强的特征学习能力,已经在图片分类、目标识别、场景理解等任务中取得了重大成果。其中,卷积神经网络在图像分类识别任务上表现出非常好的效果,成为研究的热点。基于卷积神经网络的目标检测识别算法从大体思路上分为两阶段(Two-tage)目标检测识别算法与一阶段(One-stage)目标检测识别算法。
两阶段目标检测识别的经典算法有R-CNN、SPP-Net、FastR-CNN、FasterR-CNN、CascadeR-CNN 算法等。而现在很多一阶段的目标检测和两阶段的目标检测相比,速度更快、精度更高。一阶段目标检测识别的神经网络经典算法有YOLO、SSD、YOLOV2、YOLOV3算法等。YOLO算法直接使用一个卷积网络就可以同时预测目标的位置和类别。YOLO 算法的输入为整幅图像,统揽全局信息以降低目标的误检率,同时也可以实现实时的检测。YOLOV3 算法是在原有的YOLOV2 网络上进行了改进。首先,YOLOV3 算法采用了多尺度预测融合的方式进行预测,其次,YOLOV3 算法的Darknet-53 特征提取网络对于目标的特征信息具有较好的提取效果。
YOLOV3 主要有以下改进点:1)类别预测方面主要是将原来的Softmax 分类损失修改为交叉熵损失。2)借鉴了特征金字塔(FPN)融合不同尺度特征图的思想,采用多尺度(scale)融合的方式做预测,进一步提升了YOLOV3 算法在小目标识别上的精度。3)研究表明先验框(Anchor BOX)的设定将影响算法最终的识别效果,合理的先验框可以降低算法的收敛难度提升算法性能。YOLOV3 通过遍历训练数据标签的真实边界框,采用K
-means 聚类算法生成初始的Anchor BOX。相比之前采用人为经验设定的算法(Faster-RCNN,SSD),得到的Anchor BOX 质量更高更合理。4)一方面,网络结构(Darknet-53)采用步长为2 的卷积实现特征图的缩放,相比于之前的最大池化方法(Max Pooling),卷积实现可以保留更多的特征信息;另一方面,引入了残差residual 结构(YOLOV2 中还是类似VGG 那样直筒型的网络结构,层数太多在训练过程中容易出现梯度消失和梯度爆炸等问题,得益于ResNet 的residual结构,精度提升较明显。而本文论述的是基于改进YOLOV3 的目标检测识别算法。首先,通过分析红外目标的检测特性,改进了原始算法的特征提取网络,并且融合KLLOSS;然后,再结合Soft-NMS算法用于改善网络的检测准确度,同时针对红外目标相对三通道彩色图像的特征量少的问题,在检测层前融合了SKNET模块使网络更加关注目标的有用特征;最后,给出改进网络训练的新的损失函数以及前向传播算法流程。实验结果表明,改进的KS-YOLO 网络在目标域(实拍空中红外目标数据集)上的平均精度(Average Precision,AP)性能值要优于原来的YOLOV3 网络2.4个百分点,预测时间要比YOLOV3更快。
1 基于YOLOV3 的改进目标检测识别算法
1.1 改进特征提取网络Backbone
如图1 所示,由于对红外目标图缺乏纹理、颜色等特征,为避免模型过于复杂导致过拟合,本文降低了特征提取网络的参数量,减少原网络的3 个检测层前的多残差层,其余部分仍然采用1×1 卷积和3×3 卷积串联的残差结构。

图1 改进的特征提取网络Fig.1 Improved feature extraction network
1.2 融合KL-LOSS 损失函数
通过分析大量红外目标的图像发现,在标记真实目标边界框时,实质上不可能完全对所有目标精确地标注出来,所以在标注目标边界框时,边界框的模糊性会发生。边界框的模糊性会导致网络学习困难,并降低网络性能。特别对于部分目标对象被遮挡时,边界框的边界将变得更加模糊。YOLOV3 算法依靠回归边界框来定位目标,算法的边界框回归损失即方差损失并未考虑边界框的模糊性。KL-LOSS 损失是由HE 等于2019 年提出的一种新的边界框回归损失,KL-LOSS 让网络可以同时学习边界框回归和定位的不准确性,以提升网络的检测定位精度。KL-LOSS 针对边界框的移动与位置间的方差进行学习,所学习到的方差可用于后处理阶段。研究者提出了方差投票(Variance Voting)方法,可在非极大值抑制(Non-maximum Suppression,NMS)期间使用由预测的方差加权的临近位置来投票得到边界框的位置,在同等计算量下提升不同结构定位的准确率。KL 边界框回归损失可以获取到数据集中的模糊,从而降低预测边界框的回归损失。且所学习到的概率分布是可解释的,因为其反映了边界框预测的不确定性。
1.2.1 检测框建模
x
,则可得边界框预测模型:
Θ
为可学习神经网络的参数;x
为网络预测估计的边界框位置。σ
标准差用于测量预测估计值的不准确度。当标准差σ
趋于0 时,表示神经网络对边界框位置的预测非常准确:
x
为真实边界框位置。得到2 个模型后,我们的目标是通过估计Θ
以最小化N
个样本的P
(x
)与P
(x
)之间的KL 散度。KL-LOSS 的提出,不光考虑单个预测框的正确性,而是对于N
个样本的KL 散度最小化,即
1.2.2 KL 散度
KL 散度又称KL 距离,用于衡量2 个概率分布之间的差异性:

KL 散度具有2 个重要性质:
1)不对称性

2)非负性

1.2.3 KL-LOSS 函数的计算
KL 散度可以作为衡量2 个概率分布之间的距离,于是可以使用KL 散度作为边界框回归的损失函数L
。对于单个样本图像: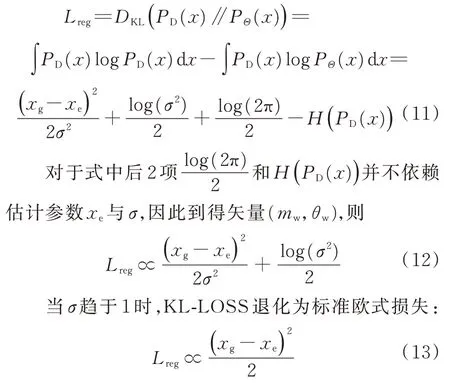
L
对于估计 参数x
与σ
是可微的:
σ
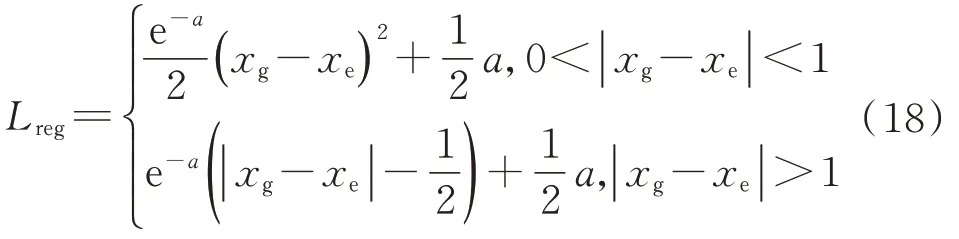
位于分母中,可能会在训练模型时发生梯度爆炸。为避免梯度爆炸,使网络预测a
=log(σ
),而不是实际中的σ
,在实际使用σ
值时再由公式转换成标准差,于是KL-LOSS 变为
x
-x
|>1 时,定义KL-LOSS 为
于是,可得到新的边界框损失(KL-LOSS)为
KL-LOSS 不仅计算预测框的坐标位置,同时也计算位置的标准差,其中计算损失的示意图如图2 所示。
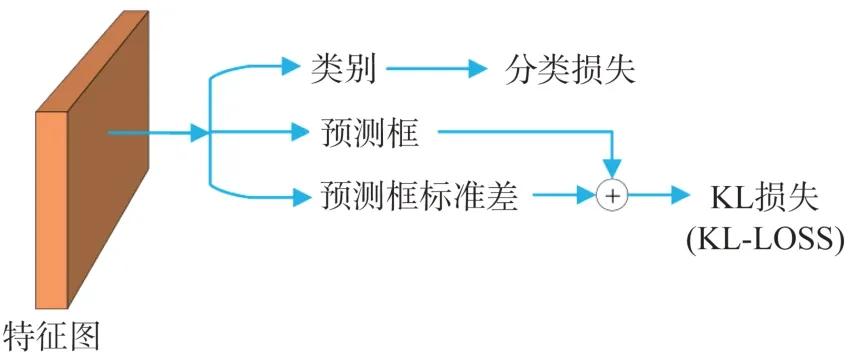
图2 KL⁃LOSSFig.2 KL⁃LOSS
1.3 融入Soft-NMS 算法
目标检测中,首先产生一些候选区域,其次通过分类网络得到类别得分,与此同时通过回归网络得到更加精确的位置参数在目标检测算法中,一个点可能对应多个预测结果,容易出现目标被多个预测框包围的情况,因此,需要采用非极大抑制的方法,保留质量最高的预测框。最后通过非极大值抑制得出最后的检测结果。目标检测算法会输出多个检测边框,尤其是在真实目标周围会有很多置信度高的检测边框,这是为除去重复的检测边框,达到每个物体有且只有一个检测结果的目的。非极大值抑制是一种获取局部最大值,抑制非极大值的算法,在计算机视觉中有着广泛的应用。其核心思想是一个迭代—遍历—消除的过程,重叠率大于固定阈值的低分框会被高分框抑制。
非极大值抑制的具体步骤对每个类别而言,首先是设置交并比(IOU)阈值,对候选框依据类别得分进行排序,选中类别得分最高的候选框,遍历其余的候选框,如果和当前类别得分最高的候选框的IOU 大于IOU 阈值,将其剔除,从未处理的边框中继续选一个类别得分最高的。重复上述过程,直到处理完所有的边框为止。保留下来的候选框即为检测结果。
非极大值抑制是物体检测流程中重要的组成部分。算法首先按照得分从高到低对检测框进行排序,然后分数最高的检测框被选中,其他框与被选中建议框有明显重叠的框被抑制。该过程被不断递归地应用于其余检测框。
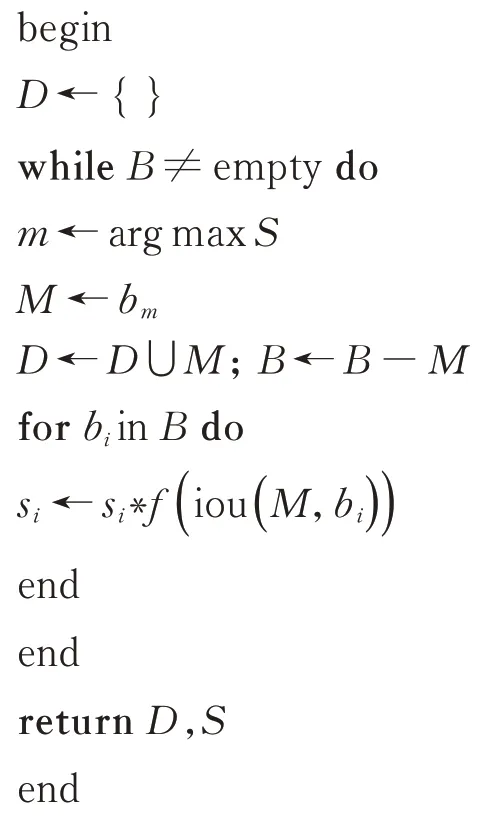
传统的非极大值抑制算法,首先在被检测图片中产生一系列的检测框B
及对应的分数S
。当选中最大分数的检测框M
时,该框从集合B
中移出并放入最终检测结果集D
。与此同时,集合B
中任何与检测框M
的重叠部分大于重叠阈值的检测框也将随之移除。如果一个物体在另一个物体重叠区域出现,即当2 个目标框接近时,非极大值抑制算法中会将相邻检测框的分数均强制归零,即分数更低的框就会因为与之重叠面积过大而被删掉,这就是最大问题所在。此时,如果重叠区域出现目标,则存在目标漏检情况,甚至导致检测失败,从而降低了算法平均检测率(Average Precision,AP)。检测算法本来应该输出2 个检测框,但是由于传统的非极大值抑制可能准确的检测框的得分较低且两框的IOU 大于设定的阈值,因此会被过滤掉,导致只检测出一个目标,显然这样的算法设计是不合理的。NMS 直接粗暴地将和得分最大的box 的IOU 大于阈值的box的得分置零,而Soft-NMS 用一个稍微小一点的分数替代原有的分数,而非直接粗暴地置零。该算法是在非极大值抑制算法上作出改进,设置了衰减函数,使得重叠部分相邻检测框的分数不会置零。如果检测框与M
重叠部分较大,则得分低;如果检测框与M
重叠部分较小,则此部分原始得分不会发生改变。在标准数据集PASCAL VOC 2016 和MS-COCO 2018 等标准数据集上,加入Soft-NMS的目标检测算法在目标有重叠部分时检测平均准确率显著提升。相对于传统NMS 算法,Soft-NMS 算法能够提高模型检测与分类效果,且不增加额外计算量。对重叠和小目标有较好检测效果,能很好地融入本文算法,降低漏检率,加快运算速度。Soft-NMS 算法流程如下。
输入:检测框集合B
={b
,b
,…,b
},相应的检测分数S
={s
,s
,…,s
},NMS 阈值N
对于传统的非极大值抑制算法,当前检测框和最高得分检测框的IOU 大于阈值时,直接将该检测框的得分置零,这将导致重叠区域较大的目标框被漏检:
s
为当前检测框的得分;N
为IOU 的阈值;M
为得分最高的检测框。而Soft-NMS 算法将当前检测框得分乘以一个权重函数,该函数会衰减与最高得分检测框M
有重叠的相邻检测框分数,越是与M
框高度重叠的检测框,其得分衰减越严重,Soft-NMS 的改进有两种形式,一种是线性加权:
另一种是高斯函数作为权重函数,从而修改其删除检测框的规则,其高斯权重函数为
1.4 融合KL-LOSS 与Soft-NMS算法
使用KL-LOSS 训练后,可以得到预测位置的方差,根据相邻目标框的学习方差对候选目标框的位置进行方差决策,通过融合KL-LOSS 与Soft-NMS算法得到var voting算法。
在Soft-NMS 循环内,投票选择目标框的位置,在选择最高的目标得分检测框b
后即b
={x
,y
,x
,y
,s
,s
,s
,s
,s
},根据自身及其相邻边检测框计算出新的位置,为较近且不确定度较低的检测框分配更高的权重。设x
为预测框的坐标,x
为第i
个预测框的坐标,则新的坐标计算如下:
σ
为可调参数。
在算法投票选择目标框的过程中,两种类型的相邻边界框会得到更低的权重:1)有大方差的框;2)候选框的IOU 小的框。分类得分并不参与投票选择,因为分类得分较低的框可能具有更高的坐标置信度。
var voting 算法流程如下。
1.5 检测层前融合SKNET 算法
1.5.1 SKNET 概述
对动物的初级视觉皮层神经元的局部感受野的研究激发了卷积神经网络的构建,并继续激励着现代卷积神经网络(Convolutional Neural Networks,CNN)结构的构建。例如,在视觉皮层中,同一区域神经元的局部感受野大小是不同的,这使得神经元能够在同一处理阶段收集多尺度的空间信息。这种机制在最近的CNN 中得到了广泛的应用。
然而,在神经网络的设计中,神经元的一些其他局部感受野特性并没有得到重视,其中之一就是局部感受野大小的自适应变化。大量实验表明,视觉皮层神经元的局部感受野大小不是固定的,而是受刺激的调节。但是,这种性质在构建深度学习模型时并没有受到太多的关注。在同一层中包含多尺度信息的模型,如InceptionNetspage90,由于下一层卷积层线性地聚集了来自不同分支的多尺度信息,因此具有根据输入内容调整下一卷积层神经元感受野大小的内在机制,但这种线性聚集方法可能不足以提供神经元强大的适应能力。
SKNET 算法是一种非线性的多核信息聚合方法来实现神经元的自适应感受野大小的算法,可以很方便地嵌入现在的网络结构(如ResNet、Inception、ShuffleNet)中,实现精度的提升。SKNet 使用了2 个思路提高精度:1)很多网络使用了各种方法来降低计算量,比如ResNeXt,计算量大大减少,精度却略有提升。那么如果不牺牲那么多计算量,能否精度提高一些呢?比如使用大一点的Kernel,如5×5 的卷积提升精度。2)采用注意力机制。加了上面2 个操作后,显然计算量会增大,于是作者再加了一个分组卷积来做换取。
算法引入了一种“选择性核”(sk)卷积,它由3个算子组成:分裂算子(Split)、融合算子(Fuse)和选择算子(Select)。分裂算子产生多条不同核大小的路径,对应于不同的神经元感受野大小,融合算子将来自多条路径的信息进行组合和聚合,以获得选择权重的全局综合表示,选择算子根据选择权重聚合不同大小内核的特征映射。Sk 卷积采用分组卷积,其在计算上是轻量的,只会稍微增加参数与计算成本。
同时算法采用注意力机制的好处已经在一系列神经网络任务中得到了体现,从自然语言处理中的神经机器翻译到图像理解中的图像字幕。注意力机制加强了对网络任务用处更大的特征表达,同时抑制不太有用的特征表达,通过引入注意机制来明确关注神经元的自适应感受野大小。
1.5.2 SKNET 基本原理与融合方法
SKNET 中,神经元的感受野大小可以在前向传播过程中自适应地改变。为了使神经元能够自适应地调整它们的感受野大小,网络能够自适应选择感受野,即在不同核大小的多个核之间进行“选择性”卷积即sk 卷积。具体地说,通过拆分、融合和选择3 个步骤来实现sk 卷积,如图3 展示了具有不同的内核大小的2 个分支的情况。

融合算子:如前面所述,目标是使神经元能够根据输入数据自适应地调整其感受野大小。其基本思想是利用阀门来控制来自多个分支的信息流,这些分支携带不同尺度的信息进入下一层的神经元。
为实现这一目标,阀门需要整合来自所有通道的信息,首先通过每个通道的像素级求和来融合自多个通道的特征:

s
的第c
个元素是通过在空间尺H
×W
上压缩U
来计算:
最后,建立一个紧凑的特征映射,使之能够进行精确的自适应选择,这里通过一个简单的全连接层(FC)实现,使用全连接层降低维度以获得更好的效率:

δ
为relu 函数;B
为批标准化;W
∈R。d
是对模型效率的影响,并使用一个比率r
来控制d
的值:
L
为d
的最小值。选择算子:softmax 回归用于自适应地选择不同通道间的特征重要性,该特征重要性通过压缩特征z
计算得到。具体地说,使用softmax 回归得到如下注意力权重:
A
∈R和a
为U
的softmax注意力向量;B
∈R和b
为U
的softmax 注意力向量;A
∈R式中为A
的第c
行;a
表示a
的第c
个元素,并且有
V
是通过不同核上的注意力权重得到
式中:

如图3 所示,SKNET 模块可以对特征通道进行重要性加权,使最终得到的特征图更加关注对检测识别等任务有用的特征通道,并且该模块会自动选择调整最优的卷积算子,进而在理论上改善检测识别等任务的性能。因此,在改进的YOLOV3 特征提取层后加入SKNET 模块,原因是在对图像特征提取后,紧接着对通道进行重要性加权,然后送入目标检测层检测。以此训练的网络在特征提取后的特征将是更加关注训练目标的加权特征,使用加权特征进行目标检测理论上将提高目标的检测效率,从而改善检测识别性能。
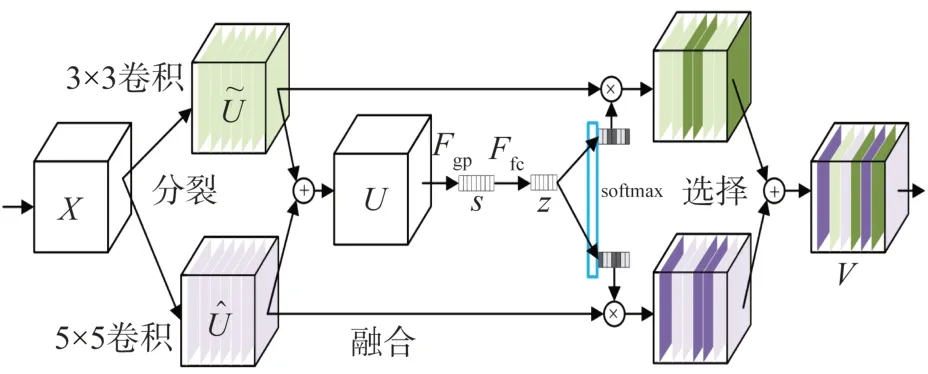
图3 SKNET 结构Fig.3 Structure of the SKNET
1.6 融合网络层
通过融合KL-LOSS 得到新网络的新损失函数,并且使用Soft-NMS 算法与通过KL-LOSS 训练得到的方差结合可以得到更加准确的目标位置,改进特征提取层与融合SK-NET 和KL-LOSS 的新网络称为KS-YOLO,如图4 所示。

图4 KS-YOLO 结构Fig.4 Structure diagram of the KS-YOLO
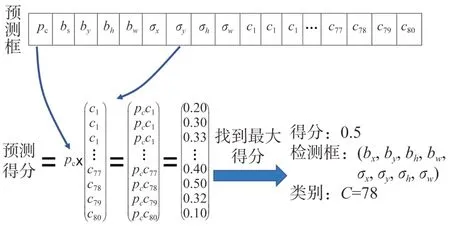
图5 KS-YOLO 位置及其标准差与类别预测Fig.5 Location,standard deviation,and category prediction of KS-YOLO
图中,P
为当前预测框有无目标的概率值,C,i
∈(1,2,…,80)为当前预测框属于某一类别的概率,σ
,σ
,σ
,σ
为边界框的中心以及宽高值,最后给出融合改进后的新网络的训练用反向传播目标损失函数为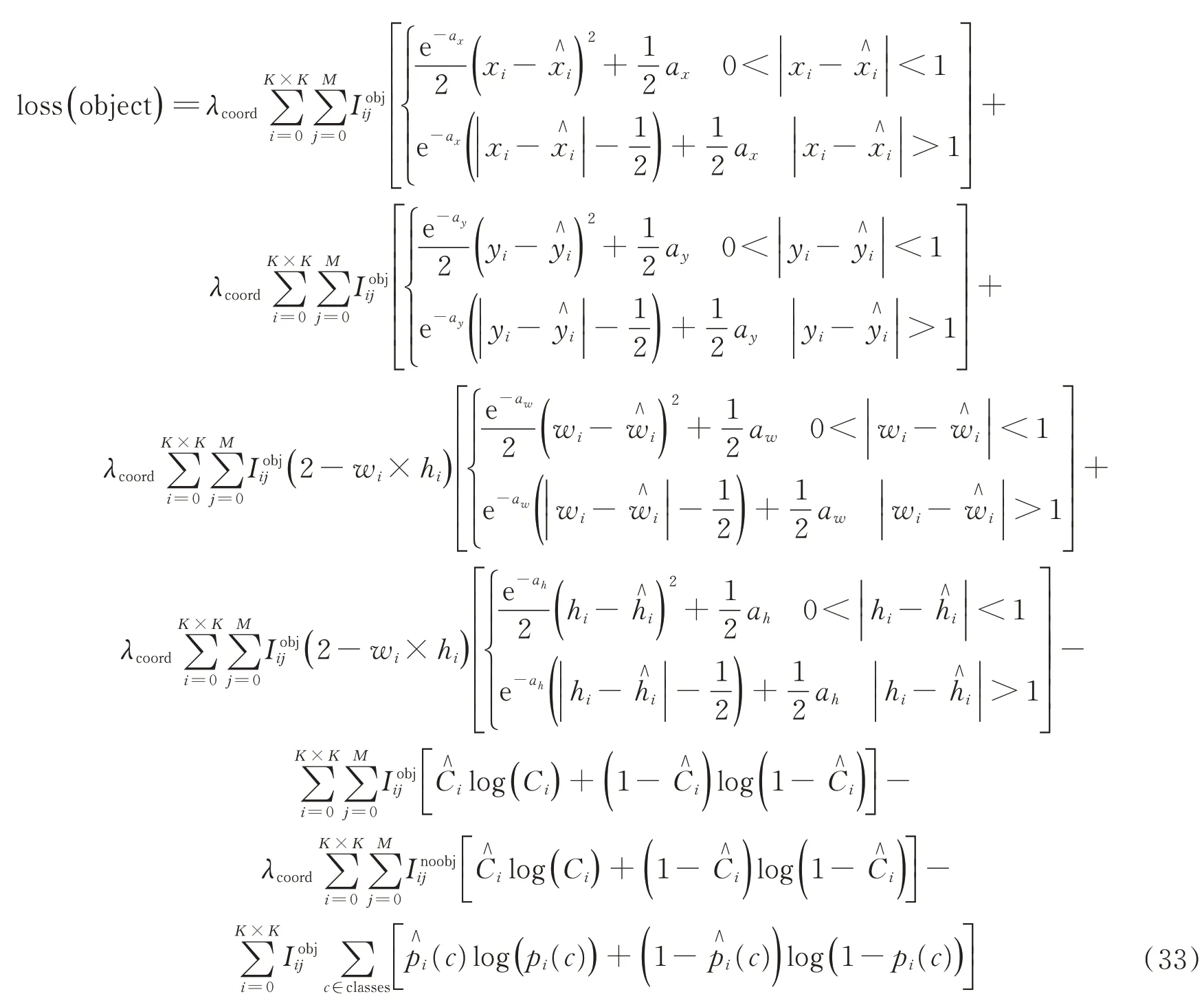
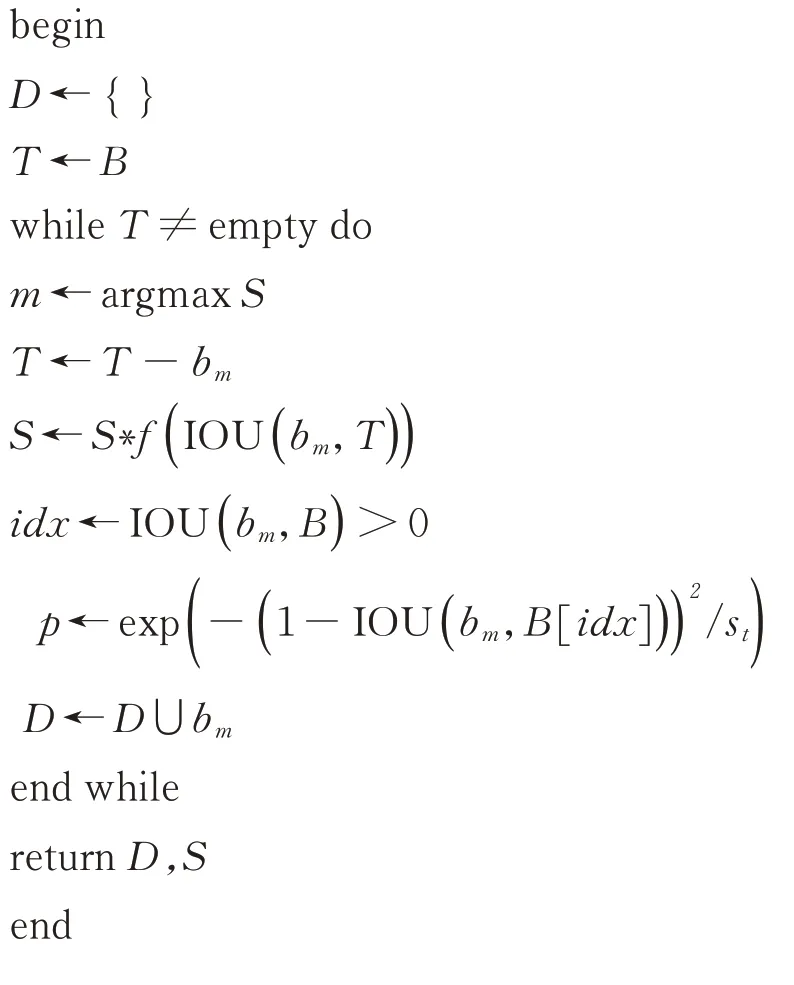
新网络KS-YOLO 前向传播算法步骤如下。
输入:图像S
输出:目标位置边界框D
,目标类别得分C
KS-YOLO 的Backbone 网络特征提取层提取图像特征得到3 个特征图map1、map2 与map3
利用特征融合层上采样(upsample)map1 并与map2 融合(concat)计算出新特征图map_2
利用特征融合层上采样(upsample)map2 并与map3 融合(concat)计算出新特征图map_3
利用融合SK-NET 的新检测层检测map1、map_2 与map_3 计算出边界框集合B
与目标置信度集合S
及条件类别概率P
(class|S
)集合利用var-voting 算法从B
、S
中筛选出最佳边界框D
及其得分S
计算目标类别得分C
=P
(class|S
)*S
返回D
,C
2 结果
定量上,评价模型检测识别性能有以下指标即精准度(Precision,P)、召回率(Recall,R)、准确率(Accuracy,Acc)、平均精准度(Average Precision,AP)、均值平均精准度(mean Average Precision,mAP)、交并比(Intersection over Union,IOU)、检测速度FPS 或检测预测时间(Inference time)。
如果设测试集图像中目标为正样本(Positive),背景为负样本(Negative)。网络将预测正样本与负样本,设正确预测正样本为目标的个数为T
,正确预测负样本为背景的个数为T
,错误预测负样本为目标的个数为F
,错误预测正样本为背景的个数为F
。则P
又叫查准率,定义为识别成目标的个数中正确的比例:
R
又叫查全率,定义为正确预测为目标的个数占测试集总的该类目标个数的比例:
Acc 定义为正确预测出正样本与负样本的个数占测试集总正负样本个数的比例:
AP 定义为每一类的精准度的均值:

mAP 定义为所有类的的平均精准度的均值:
R
与实际目标区域R
的交集与并集之比:
P
、R
及交并比指标,准确率指标又可通过P
、R
指标得到,所以AP50 指标已经成为深度学习目标检测识别领域的一个综合性指标。以绿色框表示目标本身真实位置,如图6~图7所示,黄色框表示原始YOLOV3 算法的检测识别结果,红色框表示改进的KS-YOLO 算法的检测识别结果。图6 是表示实验室仿真图像初始YOLOV3 和改进的KS-YOLO 算法对比结果;图7 是实拍空中红外目标图像初始YOLOV3 和改进的KSYOLO 算法对比结果。左图与右图是从不同方位视角下对红外目标图像进行检测。
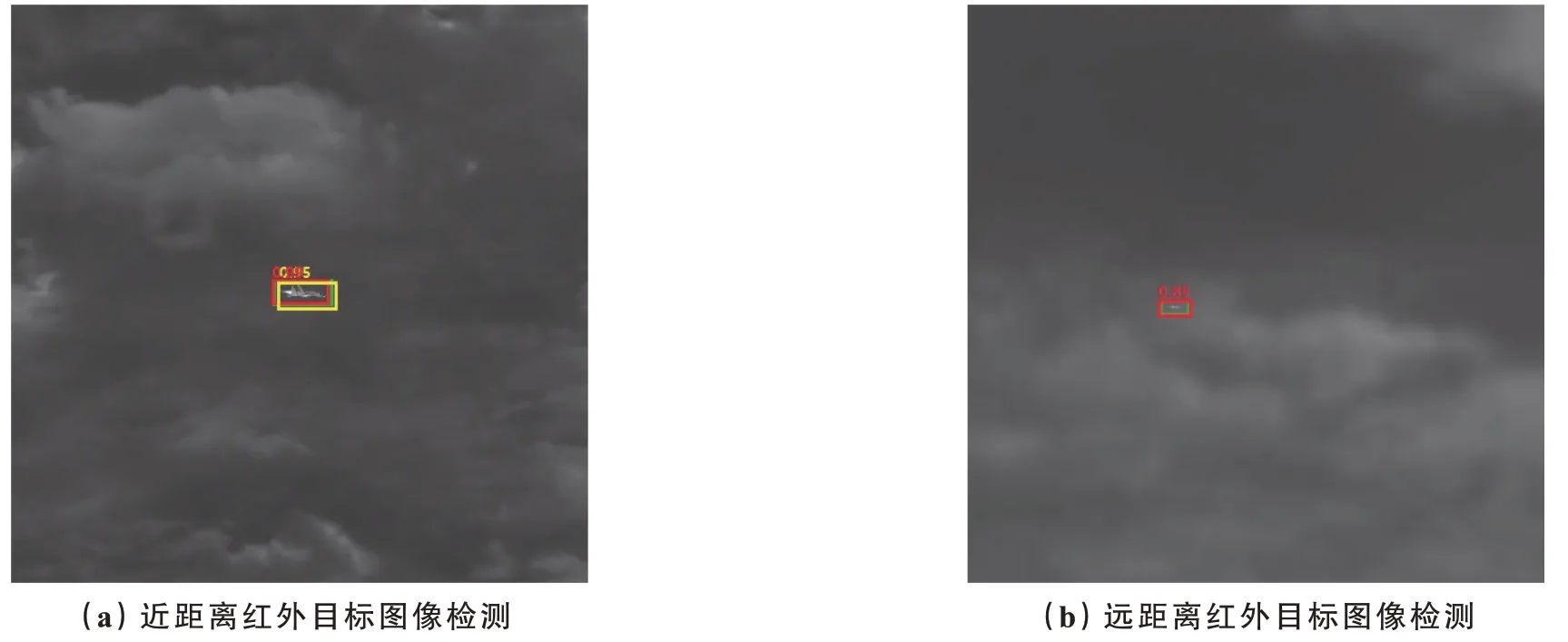
图6 实验室仿真图像初始YOLOV3 和改进的KS-YOLO 算法对比结果Fig.6 The comparison results of the initial YOLOV3 and the improved KS-YOLO algorithm in laboratory simulation images
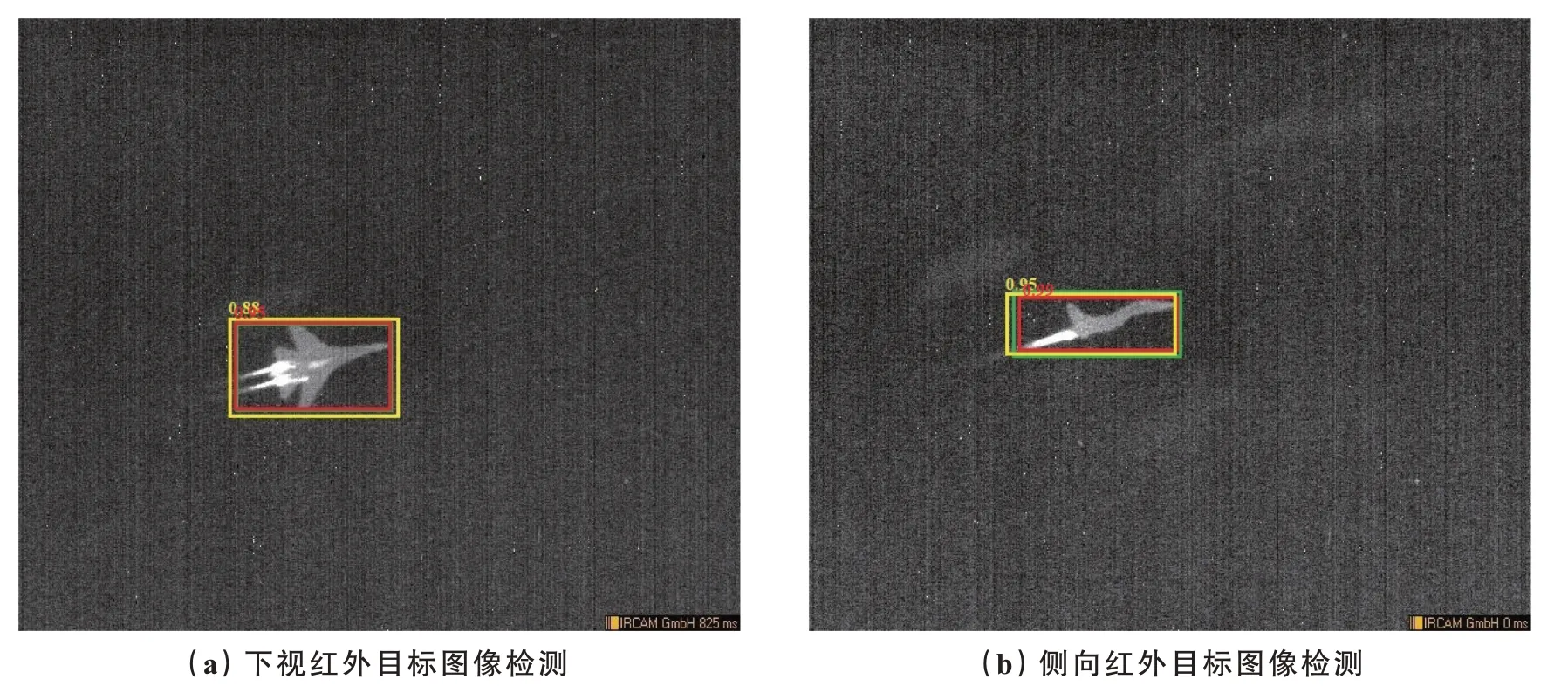
图7 实拍空中红外目标图像初始YOLOV3 和改进的KS-YOLO 算法对比结果Fig.7 Comparison results of initial YOLOV3 and improved KS-YOLO algorithm for aerial infrared target images
从实验结果看到改进的算法相对于原始算法具有更高的位置准确率,这是因为算法融合了KL-LOSS,网络预测了位置的不准确度自动校正坐标位置;同时,还可以看到改进的算法比原始算法有更高的目标分类识别得分,这是因为融合的SKNET 模块对特征通道进行了加权,并自动选择了对目标任务更有用的卷积算子,使网络更加关注对目标有用的特征,从而提升了目标识别的准确度。
统计两个算法的召回率与准确性,可以计算出评价算法综合性能的AP50 指标。实验统计了图像在800×800、736×736、608×608、416×416、320×320 的尺度上的性能,得到性能对比图如图8 所示,具体性能对比值见表1。
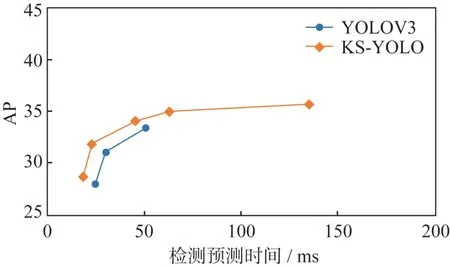
图8 目标域数据集上速度与综合性能对比图Fig.8 Speed versus comprehensive performance on the target domain dataset

表1 目标域数据集上速度与综合性能对比Tab.1 Comparison of speed and comprehensive performance on the target domain dataset
3 结束语
红外目标的检测识别在侦查、红外预警及许多领域都有着重要的意义。本文针对空战典型红外目标,使用卷积神经网络实现目标的检测与识别,并针对红外图像目标的特性进行了基础检测识别网络的改进。针对红外图像目标特征量不足检测困难、训练网络时模型容易过拟合及检测定位不准确的问题,在原YOLOV3 的基础上改进了特征提取网络,训练时融合KL-LOSS 损失并结合 Soft-NMS 算法提升了目标的检测定位精度,融合SKNET 模块提升了网络的目标检测准确性。总体来说改进的算法提升了网络对红外目标的检测精度与识别效率。
本文使用深度学习神经网络模型为基础网络,其中还有很多方面可以进行深入研究:1)对于原始YOLOV3 网络提取层的改进只是简单地减少残差层的数量,目的是为了避免模型复杂导致过拟合,对于改进特征提取层的卷积核与卷积方式也是非常好的思路。2)在算法实时性方面,YOLOV3 目标检测识别算法,在实时性上优于许多同期的检测算法,后续研究工作可进一步在实时性表现更好的基础网络上应用迁移学习技术,以减少人工标注时间,提升模型的检测识别性能。
猜你喜欢
环球时报(2022-05-23)2022-05-23 11:28:37
儿童时代·幸福宝宝(2021年11期)2021-12-21 06:18:46
北京航空航天大学学报(2021年9期)2021-11-02 08:24:26
金桥(2021年4期)2021-05-21 08:19:20
电子制作(2019年11期)2019-07-04 00:34:38
电子制作(2019年7期)2019-04-25 13:17:14
证券法律评论(2018年0期)2018-08-31 02:33:08
北京航空航天大学学报(2018年1期)2018-04-20 06:38:17
光学精密工程(2016年3期)2016-11-07 09:03:43
外语学刊(2014年6期)2014-04-18 09:11:49