
基于MEMS的便携式消防员室内定位研究*
2021-12-30 05:36:42王羿帆苏彦莽王静宜
传感器与微系统 2021年1期
王羿帆, 苏彦莽, 张 琳, 王静宜
(河北工业大学 电子信息工程学院,天津 300401)
0 引 言
日益复杂的建筑结构,给消防员的灭火工作带来了很大困难。在复杂的火场中消防员难以准确判断自身位置,无法找到撤离路线,从而错失最佳自救和营救时机。因而设计一个良好的消防员室内定位系统,对提高消防员的救援效率,保证消防员的生命安全具有重要意义。
目前存在的室内定位方式如红外线技术、超宽带技术、Wi-Fi定位技术、计算机视觉定位技术等,都需事先在环境中安装相关节点、设备,对外部条件要求较高[1]。由于消防工作的特殊性,需要考虑现场复杂度对定位结果的影响,再加上全球定位系统(GPS)等卫星信号在室内无法发挥很好的作用[2],因而对于大多数作业场景来说只有惯性导航方式比较合适[3]。但单纯靠惯性导航一种方式在定位过程中会存在很大的漂移误差,而且惯性导航定位方式不可避免会随时间产生累积误差[4],因而大多数惯性定位方案都会结合无线定位方法来修正误差以提高定位精度。因此目前消防定位首先解决的问题是提高惯性导航的精度或者采用抗干扰能力较强且安装便捷的无线定位方式来消除惯性定位产生的累计误差。
一般惯性导航主要采用积分法和航位推算法[5]:1)利用积分加速度来计算位移,再结合实时方位实现定位。但是由于传感器精度不足和外部环境的影响,实际应用中加速度两次积分后求得的位移值会随时间持续产生累积误差,几秒内误差可达几十米,甚至几百米,几乎不能达到定位所需要的精度[6]。2)利用步数和步长计算位置,一般可以根据目标运动的加速度或角速度特点得到比较精确的步数。通过行走过程中步频或加速度与步长之间的关系来求出每一步的步长值[7]。但这类算法对个体差异的变化比较敏感,尤其是很难准确计算原地踏步等类似运动的位移结果。
1 位置信息确定方案
1.1 误差产生原因
产生误差的首要原因是传感器的精度问题,高精度传感器往往体积较大且价格昂贵。 微机电系统(micro-electro-mechanical system,MEMS)传感器具有尺寸小、价格低的优点,但其采集数据的误差相对较大[8]。且最终的定位结果,还要进行坐标系转换、位移计算等多个阶段,误差会进一步增加。再加上穿戴式设备所处环境和运动状态相对复杂,想得到准确的测量结果就更加困难。这些问题导致惯性定位方式本身存在着不可避免的累积误差,且误差会随着时间距离的不断累积而越来越大[7]。研究显示,人位移计算结果误差的标准差与运动持续时间的三次方呈正相关[9],以上为惯性导航定位不能得到广泛应用的根本原因。
1.2 零速度更新法
理论上,根据传感器采集到的加速度、角速度数据解算出运动距离和方向便可以算出目标位置。但在实际应用中,由于姿态传感器精度有限,尤其对于低成本MEMS惯性传感器而言,几乎不能在一次积分后检测到速度为零的结果[9],再次积分之后误差被进一步扩大,在长期累积误差会更大。零速度更新法可以解决运动结束后的速度漂移误差问题,使积分方式带来的误差大大减小。零速度更新法通过实时检测目标的静止状态,将静止态的速度强制置零,来解决积分误差带来的静止时速度不为零,从而使目标位移仍不断变化的问题,避免误差累积到下一运动过程中[1]。效果如图1所示。
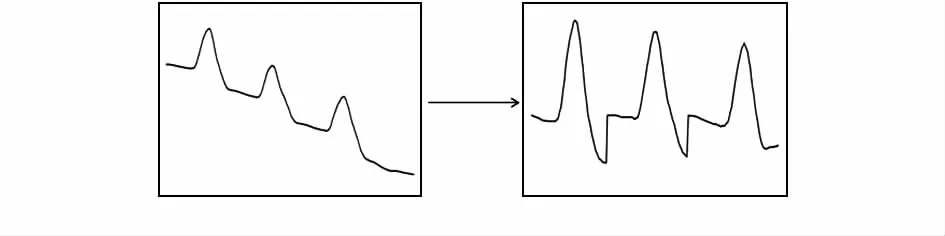
图1 零速度修正效果
1.3 运动拆分法减小累积误差
1.3.1 单步拆分算法
零速度更新法解决了积分加速度得位移过程中的漂移问题。但在静止态将目标的运动速度强制置零,只是保证了目标开始下一运动状态的初始速度为零。在计算单个运动状态的速度时,仍然包括了运动状态过程中持续产生的误差。而且通过实验分析得知,在一个运动状态中,随着运动的持续积分误差是逐渐增大的,且在一个运动状态的末尾误差会达到最大。为了减小这种误差,本文利用脚部运动先加速后减速的规律,将单个运动状态再次拆分成加速运动和减速运动两个部分。由于脚部运动总是由静止到运动再到静止的过程,因而若分别在加减速两个部分独立计算速度,可大幅减小积分的累计误差。加速部分指速度从零开始增加直至达到最大的过程,减速部分指速度由最大减少到零的过程。把单个运动状态拆分成这两个过程,再将减速过程看作是初速度为零的加速过程的逆过程,进而将单步运动状态的开始和结束速度都约束为零,以达到更有效降低误差的目的。约束效果如图2所示。
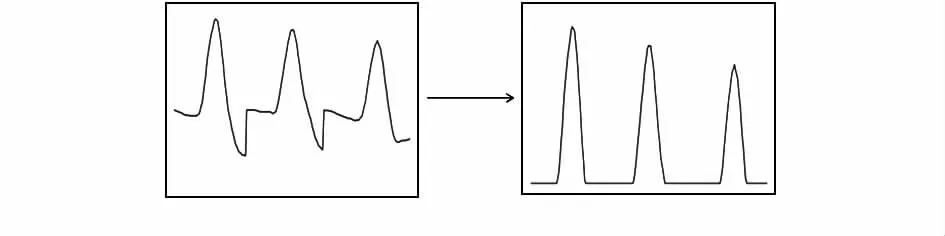
图2 运动拆分约束速度效果
1.3.2 运动状态拆分算法
要想实现上述处理方式需要从整个运动过程中分离出单步运动状态,且关键在于运动状态的实时监测和精确识别。因而本文根据人整体运动的规律把整个运动状态进行单步分段拆分,利用检测算法判断目标的运动和静止状态分别采集数据,来保证加减速阶段的速度修正。
由于在脚部运动的加速度规律性不如角速度明显,且由角速度判断步数算法更为简单,因而选择根据脚部角速度的特征来分解运动,这里用5个阈值来加强每一步开始和结束判断的准确效果。第一为开始阈值,当角速度大于此值时判断运动开始,并设置一个标志位,在角速度由正变负再变正的过程中,根据运动特征再加入3个阈值,下一个阈值是否有效依赖于上一个阈值是否已起作用,不相邻的阈值间互不影响,达到每个阈值时都会设立一个标志位。最后一个阈值判断运动过程的结束,且当前面所有标志位为1时才有效,最后缓存单步运动开始到结束的加速度值并将所有标志位置零,等待进入新的状态检测。经多次试验其运动状态分离的准确率达99%以上,行走过程中的角速度规律如图3所示。
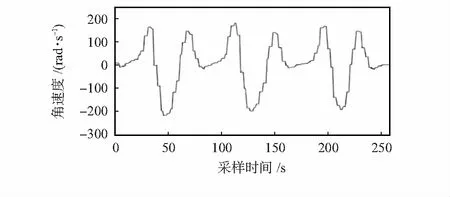
图3 角速度规律分析效果
1.4 位置处理
1.4.1 整体位置计算过程
1)求解四元数坐标转换矩阵,将载体坐标系采集到的加速度值转换到导航坐标系中。但由于姿态传感器精度不足,且室内存在较大的磁场干扰,其采集到的航向角的绝对值远不能达到定位的精度。因而此方案采用与GPS结合的方式,在进入室内之前先校准载体系与正北方向的航偏角。并且将指南针模块放在运动剧烈程度较小的腰部来减小俯仰运动对模块正常工作的影响。从而保证定位的准确性。坐标转换矩阵如下
式中an(aE,aN,aU)为变换后导航坐标系下的加速度值,ab(ax,ay,az) 为变换前载体坐标系下的加速度值,q(q0,q1,q2,q3)为姿态四元数。
2)转换到东北天坐标中后,根据角速度特点判断运动和静止状态。保留单个运动状态由始至末的有效加速度值进行下一步处理。对单个静止态的加速度值取平均处理,用来进行零偏校正
(1)
式中a1~an为单个静止态中的加速度值,这种方法充分利用了上一步对运动状态的分析结果,大大减小了计算量,且有效剔除了影响运动态位移计算的加速度漂移误差。在不影响运动状态判断准确性的前提下,实现了对有效加速度数据的选取。
3)得到有效加速度值后,对单个运动状态继续进行拆分和速度修正,计算出显著消除累计误差的单步位移值,然后结合每个运动状态测得的方向数据计算出目标最终位置。本文流程图如图4所示。
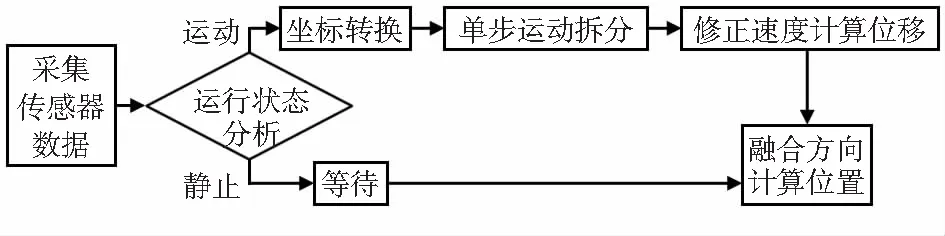
图4 方案流程图
1.4.2 首尾双静止态速度修正算法
对整体运动状态进行拆分,只计算运动态位移,不仅能够有效减小误差,也为进一步拆分单个运动状态打下了基础。本方案在此基础上又提出将首尾速度都做归零修正的方法,即在拆分后单个运动状态的加减速阶段,分别修正并计算速度。加速阶段,从零初始速度开始,以加速度值持续为正作为处理依据,当检测到加速度由正转变为负时,停止加速阶段速度处理过程。减速阶段,为了方便处理,将减速阶段看作从零速度开始的加速运动的逆过程。即从末零状态开始,从后往前计算速度值,以加速度值持续为负作为处理依据,当检测到加速度由负转变为正时,停止处理过程。保留每个阶段中计算得到的速度值,最后将得到的速度进行组合,由始至末按顺序积分速度得出位移。
2 实验验证
采取直接积分加速度求位移方式,相关文献和实验结果都显示定位误差巨大,漂移误差严重,最终无法实现定位[1]。故只对比零速度更新法与本文的位置计算结果。
本次实验姿态传感器采用维特智能公司的低成本WT931芯片和GY26磁力计,数据由STM32F103单片机进行采集和处理。分别通过直线运动、往返运动和轨迹运动三种运动方式对比和验证本定位效果。
2.1 直线和往返运动实验结果
分别计算两种方式在直线运动28.8,72,100.8 m的结果,同一距离分别以不同速度运动3次取平均值,两种方式得出的最终距离解算结果如表1所示。分别用两种处理方式在南北距离为7.2 m的室内往返运动4,7,14次,得出最终距初始位置的距离解算结果如表2所示。

表1 直线行走实验结果
从表1中可以看出,在100 m内,此算法对位移计算的精确度可以达到99.3 %以上。而用普通零速度更新算法只能达到80 %左右的精确度。

表2 往返运动实验结果
从表2中可以看出在往返运动14次,总位移距离达到近200 m后,本文目标距初始位置也仅差1.48 m,准确度达到了99 %以上,效果显著好于零速度更新法。
2.2 进行矩形运动的定位效果
采用本方案由2人在长7.2 m,宽12 m的空间内,进行矩形运动实验,分别进行3次运动,轨迹结果如图5所示。
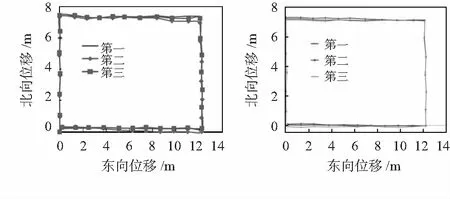
图5 矩形轨迹定位效果
3 结 论
为提高消防员室内定位精度,提出了根据人运动特征对其运动状态做两次分解处理的方案。首先分离出运动状态进而除去静止态误差,再将单个运动态拆分为加减速2个阶段,进一步做速度修正,以减小运动态的误差累积。实验证明此方案能显著降低位移积分过程中的漂移误差和
累积误差,百米定位误差在0.7 %以内。由实验结果可知,根据运动特征拆分运动过程,进而在运动中最大程度地加入速度修正,能有效减小定位误差的累积,提高单纯惯性导航方式的定位精度,从而实现实时、便携且高精度的室内定位。
猜你喜欢
当代水产(2022年6期)2022-06-29 01:12:20
汽车观察(2018年12期)2018-12-26 01:05:42
金桥(2018年4期)2018-09-26 02:24:46
劳动保护(2018年8期)2018-09-12 01:16:14
中学生数理化·高一版(2017年3期)2017-07-08 11:55:27
火控雷达技术(2016年1期)2016-02-06 02:18:01
小樱桃·童年阅读(2015年9期)2015-11-26 14:30:45
小樱桃·童年阅读(2015年6期)2015-06-26 14:18:51
中国铁道科学(2015年4期)2015-06-21 06:46:06
小樱桃·童年阅读(2015年5期)2015-06-02 14:39:47
