
基于曲量场空间的皮带堆煤识别*
2021-12-30 06:10:28姜文涛王梓民
传感器与微系统 2021年1期
姜文涛, 王梓民, 张 驰
(1.辽宁工程技术大学 软件学院,辽宁 葫芦岛 125105; 2.辽宁工程技术大学 研究生院,辽宁 葫芦岛 125105)
0 引 言
随着近年我国煤炭行业的发展,皮带运输装备广泛应用在各大中小型矿井生产当中[1~3]。如何实时、准确的对皮带在落煤点处产生的堆煤进行定位与识别,并在堆煤事故发生前产生有效预警,已逐步成为保障煤炭安全生产关键问题之一。
目前,国内外各个矿井主要利用三种方法解决皮带堆煤预警问题,分别为人工检测、传感器检测和视频图像计算机视觉检测[4,5]。随着生产装备自动化和智能化建设,为了更好地降低人力和物力成本,人工检测在皮带堆煤预警方面不具有更好地发展前景。传感器检测预警主要采用行程开关堆煤传感器、煤油开关或水银开关堆煤传感器和电极式堆煤传感器进行堆煤识别。现有的堆煤传感器主要存在以下不足:1) 行程开关堆煤传感器在潮湿的环境中,极易发生短路,耐用性较差,且识别准确率不理想;2) 煤油开关或水银开关堆煤传感器不具有较好的抗干扰能力;3) 电极式堆煤传感器受湿度、大颗粒煤块等因素影响,堆煤识别错误率较高。
为了解决以上问题,本文在文献[6]的研究基础之上,将曲量场空间理论应用到煤矿皮带堆煤识别中,提出了基于曲量场空间的皮带堆煤识别方法。
1 曲量场空间原理
曲量场空间是利用空间悬浮点阵来描述三维信息的悬浮点阵模型,即
(1)
1≤i≪max(N),1≤j≪max(N)
(2)
1≤Z≪max(Nx,y,z)
(3)

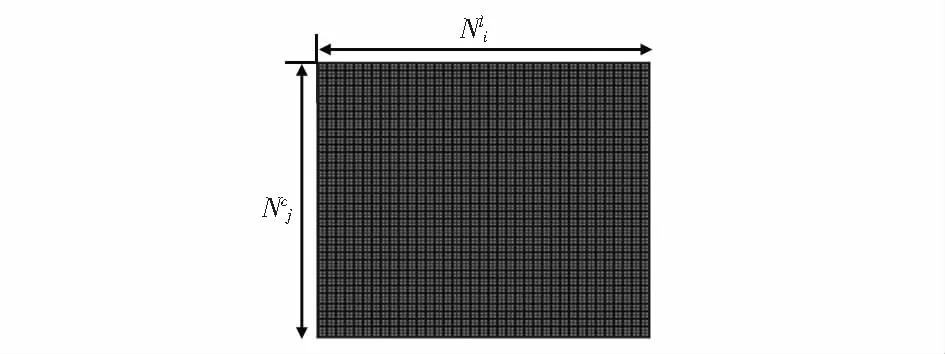
图1 曲量场模型
此时,最小曲量场表示如下
(4)
z=min(Nx,y,z)
(5)
式中di,j,z为最小曲量场的空间坐标。
曲量场空间是曲量场所在的三维空间模型[8],即
(6)
1≤Dep≤max(Nx,y,z),v≡3
(7)
式中s为曲量场,x,y,z分别为曲量场的空间坐标系数,Dep为曲量场空间的深度,最小深度是曲量场厚度Z的最小值1,此时曲量场空间的深度存在且有意义。曲量场空间模型如图2所示。
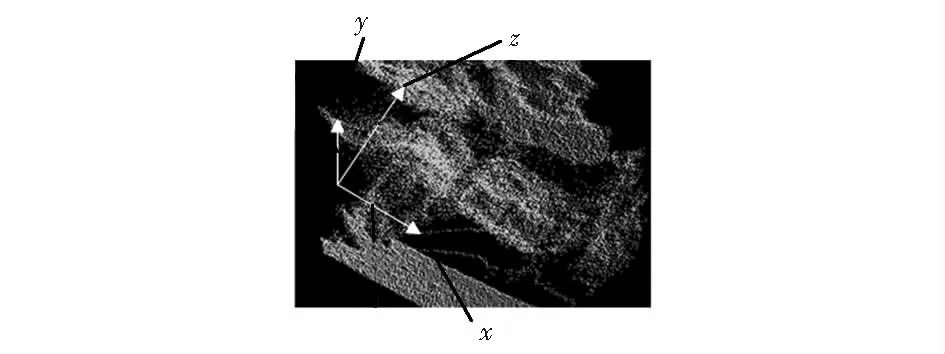
图2 曲量场空间模型
曲量场空间可以表述为最小曲量场z轴的n倍拉伸,表示如下
(8)
其中
V(x,y,z+)=
(9)
式中x≡,y≡为x,y轴不变量,n为z轴的拉伸倍数,即曲量场空间深度,数值z∈[1,max(Nx,y,z)]。V(x,y,z)为空间拉伸后的坐标。
2 堆煤模型构建
2.1 堆煤图像初始化
检测堆煤图像亮度信号,计算各灰度阶在图像中的概率分布值及其信息熵。
堆煤图像的信息熵为H,即
(10)
式中H(A)为随机变量A的信息熵,-log(pi)为变量ai的自信息量,当pi=0,自信息量-log(pi)的值为0。
计算相邻视差图像的熵分布,提取熵极值点处的灰度值,作为图像中堆煤子区域像素的分割阈值。计算相邻灰度阶的递变方向与递变幅值并采用向量进行标定。
2.2 堆煤图像投影

(11)

2.3 噪声补偿与空间分类
根据原始曲量场空间模型,计算堆煤图像经投影后曲量场空间的偏移角度,并以y轴为中心将堆煤图像的曲量场空间旋转相应角度,修复堆煤子空间的位置偏移。计算所有曲量子的分布密度,以平均密度值对堆煤图像噪声区域进行补偿。
堆煤图像中堆煤子空间处于曲量场空间的中间偏下位置,且曲量子聚合度较高,无其它信息干扰,可以根据曲量场空间内曲量子的聚合度进行分类,其中α为曲量场空间的深度信息,β为维度信息,即
α(dep)=
(12)
(13)
式中i∈[0,N],j∈[0,N],k∈[1,max(dep)],Ti,j,k为空间维数。
3 实验结果与分析
3.1 实验环境与样本集
本文提出基于曲量场空间的堆煤识别方法在Pentium 3.06 GHz/2 GB实验平台上采用C++语言编程实现。实验选取矿井皮带堆煤视频数据对算法进行测试。井下现场中摄像机的俯角为35°,成像焦点与堆煤中心的水平距离约3.7 m,实际现场如图3所示。实验测试6组视频数据,每组视频数据包含1 217帧灰度图像,图像的分辨率为352×288,灰度级为256。
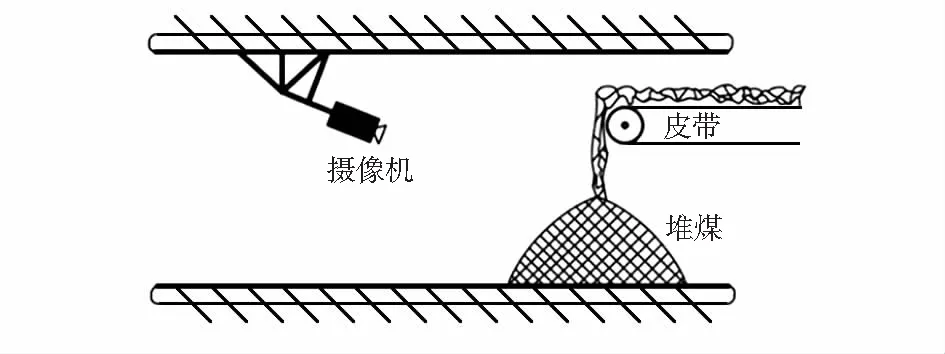
图3 现场仿真
3.2 煤堆模型构建结果与分析
如图4所示,原始视频数据因井下随机强噪声和落煤点处周围大量粉尘的影响,堆煤图像模糊,且图像受到相似背景的干扰,堆煤边缘模糊。经本文方法提取后,堆煤模型轮廓清晰,与背景衔接处的噪音干扰较小,使煤堆前景信息增强显著,抑制煤堆相似背景信息,提取后的堆煤模型与原始视频数据中的堆煤图像在视觉效果和实际测量结果上吻合程度较高,使得本文算法对井下环境中的堆煤模型构建与识别具有较强的准确性和实用性。
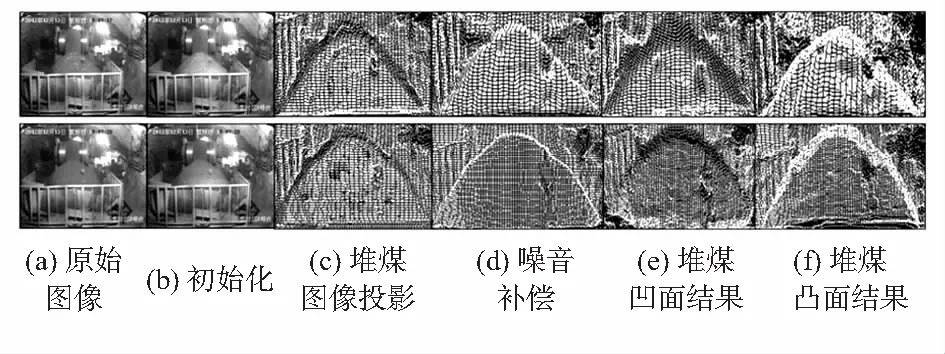
图4 模型构建过程
为了进一步验证本文算法的识别效果,分别在堆煤高度误差He、半径误差Re、单帧识别时间Tc、坡度比率Sa以及分类识别准确率Cra等五个评价指标对本文所提出的方法进行测试分析,其中坡度比率Sa是指堆煤模型构建的坡度与实际堆煤坡度的比率,分类识别准确率Cra是把曲量场子空间按照曲量子聚合度分成堆煤空间和背景空间的准确率,以便检验本文算法在井下复杂噪声环境下的鲁棒性。
堆煤模型构建过程如图4所示。图4(a)是随机抽取的矿井皮带落煤点处的堆煤图像,包括9′17″的图像、9′28″的图像,这些图像受井下强噪声和粉尘干扰,使图像中堆煤的前景信息和背景信息区分困难,边缘对比强度减弱。图4(b)是对原始图像初始化的结果。图4(c)是进行堆煤图像投影的结果,强化了边缘对比度,滤除粉尘干扰,由于噪声图像幅度起伏遵从高斯噪声的分布特点,即边缘锯齿效果,使堆煤边缘细节的提取存在一定误差。图4(d)是对曲量场空间模型进行噪音补偿的结果,滤除了大部分噪声区域,堆煤模型的平滑程度得到明显增强。从图4(e),(f)提取的堆煤模型结果来看,本文算法对井下噪声和粉尘的去除具有明显优势,所提取的堆煤模型具有较明显的三维视觉效果,符合实际的堆煤测量结果。
从图5不同时刻下的堆煤子空间分类结果来看,堆煤子空间聚合度较高,受背景曲量子信息的干扰较少,分类识别准确率较高。本文方法对6组视频的实验测试数据结果见表1,其中每组实验反复进行10次,取均值作为实验结果。
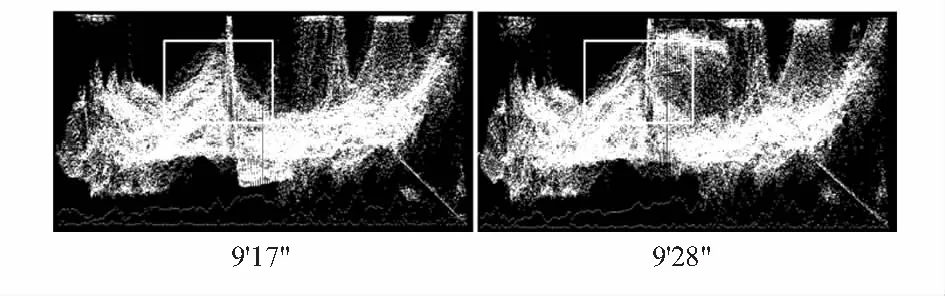
图5 堆煤子空间分类结果(方框区域为堆煤子空间)

表1 实验测试数据
对表1中6组视频测试结果中的时间进行均值计算得出,单帧图像处理平均速度为37.537 ms,约0.038 s/帧,执行速度为26.3 s/帧,堆煤事故的预警时间最大间隔为38 ms,说明本文算法在识别速度上具有较强的优势,反映速度较快,可以满足井下堆煤事故的实时预警需求。
将本文算法与文献[7]提出的矿山智能视频分析与预警系统研究中堆煤检测方法进行对比,本文算法的识别准确率平均为98.2 %,仅比文献[7]高出0.002,本文算法识别速度为0.038 s/帧,相比文献[7]的0.6 s/帧执行速度,本文算法在识别速度上具有较强的优势,可以满足对矿井堆煤事故的实时预警的需求。
4 结 论
实验结果表明:在井下复杂环境中,利用曲量场空间进行皮带堆煤图像识别,取得了较好的效果,准确率为98.2 %,识别误差较低,算法执行速度为26.3 s/帧,识别速度较快,在煤矿井下皮带堆煤识别方面具有较高的应用价值,可以满足矿井对皮带堆煤检测在应用中的需求。
猜你喜欢
纺织科学研究(2021年1期)2021-12-03 15:04:42
数学年刊A辑(中文版)(2020年3期)2020-10-27 02:44:16
电子制作(2019年22期)2020-01-14 03:16:52
传媒评论(2019年5期)2019-08-30 03:50:18
时代英语·高一(2019年1期)2019-03-13 10:29:48
中学生数理化·八年级物理人教版(2017年9期)2017-12-20 08:11:30
公民与法治(2016年4期)2016-05-17 04:09:39
噪声与振动控制(2015年4期)2015-01-01 07:08:05
振动、测试与诊断(2014年4期)2014-03-01 01:14:09
河南科技(2014年22期)2014-02-27 14:18:16
