
自抗扰控制进出口独立调节系统性能研究
2021-12-26 13:00汪成文刘华李标兵
哈尔滨工程大学学报 2021年11期
汪成文, 刘华, 李标兵
(1.太原理工大学 机械与运载工程学院,山西 太原 030024; 2.太原理工大学 新型传感器与智能控制教育部重点实验室,山西 太原 030024)
阀控系统具有功率密度比高、响应速度快等优点,使得其在广泛应用于现代化工业生产的各个领域,如:工程机械、运动模拟器、飞机起落架、机器人以及锻压机械等领域[1-5]。但是普通的阀控系统中泵源始终输出恒定的流量和压力,设计系统需要按照最大负载工况设计泵源。因此在小负载工况时,泵源输出的功率远大于负载实际所需功率,从而造成较大的节流损失和溢流损失。因此有学者提出了负载敏感系统,使用流量可调的泵源,并且通过实时检测的负载压力调节泵源的运行状态使其输出的功率与负载所需功率相匹配[6-7]。
文献[8-9]通过机液压力反馈的方式来调节泵的排量实现泵源压力的控制。为了克服机液负载敏感系统采用长管道来完成压力反馈会导致的压力反馈滞后问题,文献[10-11]提出了电液负载敏感系统,使用压力传感器来获得压力信号,并且将机液负载敏感泵替换成电子泵。为进一步提高系统的稳定性,文献[12]提出电液流量匹配控制系统,除掉了压力反馈回路,根据电机转速和泵的排量来计算电控泵的控制信号。文献[13]针对不匹配干扰提出了基于干扰观测的控制策略,并针对内部压力动态稳定性问题进行了分析。上述论主要集中于负载敏感系统的稳定性和控制方法。本文使用进出口独立控制技术,打破了进油口联动节流,通过设计阻抗工况和超越工况的控制策略和应用自抗扰控制方法来解决系统中的耦合问题,从而进一步提升负载敏感系统的性能。
1 系统组成和数学建模
本文研究进出口独立调节负载敏感系统组成如图1所示。该系统包括:伺服电机、定量泵、伺服阀1、伺服阀2、液压缸、位置传感器、控制器、压力传感器1、压力传感2、压力传感3。该系统有3个控制元件:控伺服阀1、伺服阀2、伺服电机。从职能分工角度分析,伺服电机控制定量泵按需提供流量和压力;2个伺服阀用来完成进出油口的解耦,在实现位置伺服控制功能的同时减少不必要的节流损失。
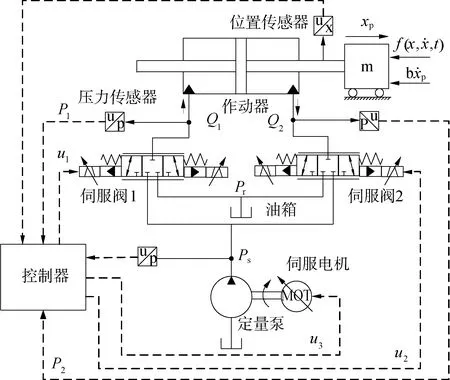
图1 进出口独立调节负载敏感系统原理Fig.1 Principle of load sensing system based on independent inlet and outlet
在建模时规定:液压缸向右伸出正方向,向左缩回为负;左腔进油时流量为正方向,出油时流量为负;右腔出油时流量为正方向,进油流量为负。
作动器输出力与负载力平衡方程为:
(1)

假设伺服阀的频率响应远高于作动器工作频率,因此可以将伺服阀动态过程简化成比例环节[14]:
xvi=kviui,i=1,2
(2)
式中:xvi、xv2为伺服阀的阀芯位移;u1、u2为伺服阀的输入信号;kv1、kv2为伺服阀的增益。

通过伺服阀的流量可表示为:
(3)
式中:Cd1、Cd2为伺服阀的流量系数;ω1、ω2为伺服阀的面积梯度;ρ为液压油密度;Q1、Q2为液压缸两腔的流量;Ps、Pr为供油压力和回油压力;u1、u2为伺服阀的输入信号。
忽略作动器的泄漏,作动器两腔动态可由(4)表示为:
(4)
式中:V1、V2为液压缸两腔的容积;βe为油液体积弹性模量。
假设电机的频响远高于作动器的工作频率,因此可以将电机的动态过程简化成比例环节:
ωp=kpu3
(5)
式中:u3为伺服电机的输入信号;kp为电机的转速增益。
定义Qin=S(xd-xp)Q1+S(xp-xd)Q2为流入伺服阀的流量。假设泵控子系统的响远高于作动器的工作频率,则泵出口压力动态可以表示为:
(6)
式中:Vp为液压泵的容积;Dp为定量泵的排量;Ql为液压泵泄漏的流量;Qin为流入伺服阀的流量;u3为伺服电机的输入信号。
由式(1)~(6)可以得到系统的控制框图。
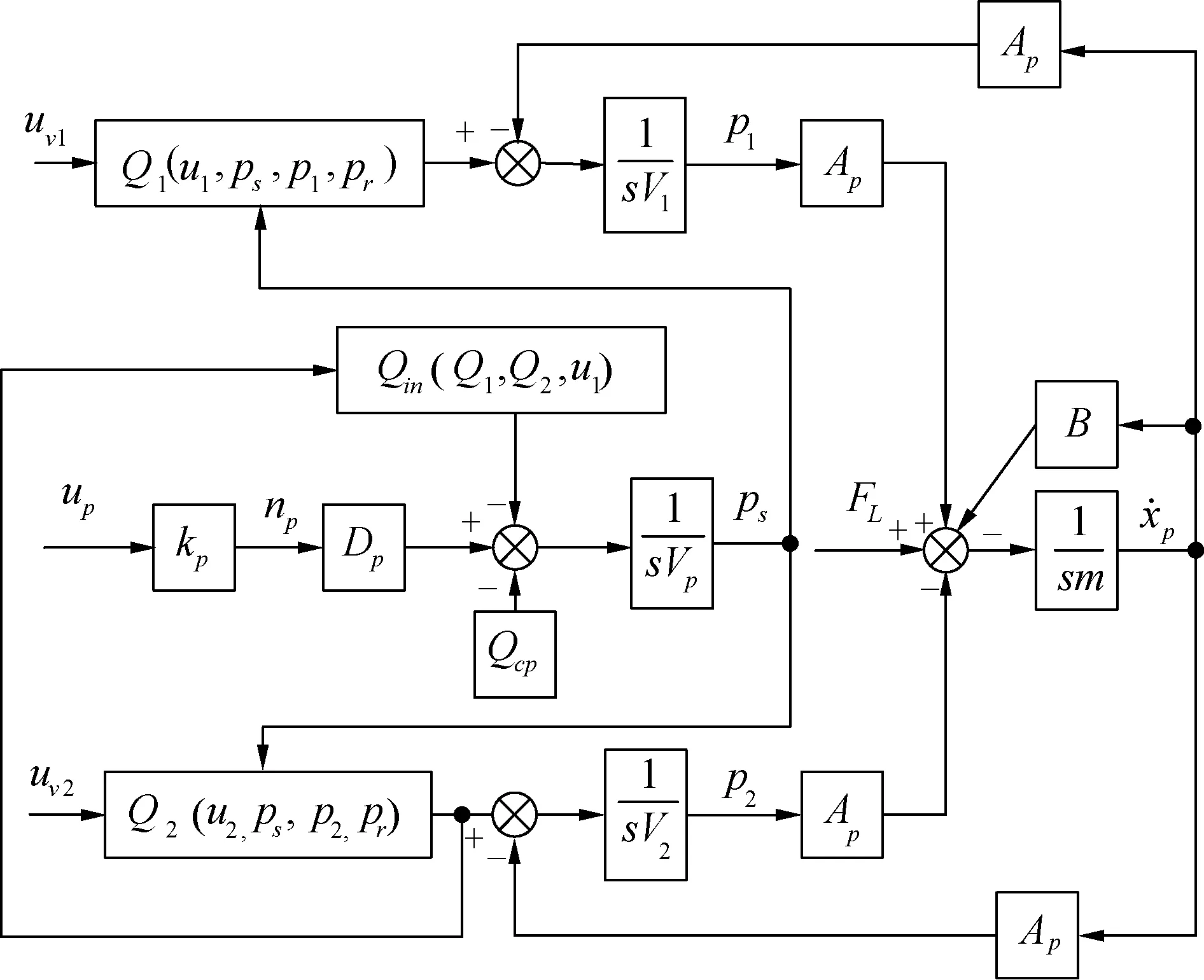
图2 进出口独立调节负载敏感系统控制框图Fig.2 Block diagram of of independent metering system
从框图中可以看出泵两腔的压力也和活塞的速度耦合存在耦合关系,具体表现为:在调节阀芯位移来控制液压缸一腔压力时,活塞速度的变化会干扰压力的控制。同时,调节阀芯位移来控制活塞速度时,压力变化也会影响活塞速度的控制。另外,泵源输出的压力和通过伺服阀的流量耦合在一起。具体表现为:通过调节泵输出的流量来控制泵源压力时,伺服阀的流量的变化会干扰泵源输出压力的控制。同时,在调节阀芯位移控制液压缸的运动时,泵源输出压力变化也会影响流过伺服阀的流量。
2 控制策略
进出口独立调节的负载敏感系统有3个可控元件,提高了系统的灵活性。因此,可以根据液压缸所处的工况选择相应的控制策略来提高系统的性能。设计控制策略时,首先分析了普通负载敏感系统在阻抗工况和超越工况下压力特性,然后针对不同工况设计不同的控制策略,来提升负载敏感系统的性能。
2.1 负载敏感系统特性分析
为了便于分析负载敏感系统的压力特性,做出以下假设:
1)泵源压力比进油腔压力高出值为pd,即:
ps=S(xv)(p1+pd)+S(-xv)(p2+pd)
(7)
2)系统回油压力为零,即:
pr=0
(8)
3)液压缸为对称缸并且油液体积压缩流量和泄漏流量很小,将其忽略不计,即:
(9)
4)负载敏感系统中阀口是对称匹配的,即:
α1k1u1=α2k2u2
(10)
定义负载pl=p1-p2,联立式(3)、(7)~(10)可得两腔的压力和节流口的压降:
(11)
从式(11)可以看出,负载敏感系统中2个节流口的压降相同且均为压差指令。执行器两腔压力和泵源压力均与负载压力和活塞运动方向有关。当系统所处的工况不同时,负载压力大小和方向以及活塞运动方向都会变化,所以下文将详细分析系负载敏感系统各种工况下两腔压力和泵源压力的变化。
2.1.1 空载工况
(12)
从式(12)可以看出,系统空载时,液压缸两腔压力均为pd,2个节流口的压力损失均为pd。系统空载时,液压系统对负载不做功,泵源输出的压力仅用来满足2个节流口压力损失。
2.1.2 阻抗工况(以伸出为例,xv>0)
(13)
阻抗伸出时,p1>p2,负载压力为正数,阻碍活塞运动的外负载力越大,负载压力pl越大。对比式(12)、(13)可以看出,当阻抗力增大使得负载压力增加了pl时,泵源输出压力增加pl,左腔压力也增加了pl。也就是说,当系统处于在阻抗伸出工况时,随着阻碍负载运动的力增加,泵源会增加输出的压力,使得左腔压力增加以满足系统所需负载压力。
2.1.3 超越工况(以缩回为例,xv<0)
(14)
在超越缩回时,p1>p2,负载压力为正数,协助活塞运动的外负载力越大,负载压力pl越大。对比式(12)、(14)可以看出,当协助力增大使得负载压力增加了pl时,泵源输出压力会减少pl,右腔压力会减少pl。也就是说,当系统处于在超越缩回工况时,随着协助负载运动的力增加,泵源会减少泵输出的压力,使得右腔压力会减少以满足系统所需负载压力。
2.2 控制策略
在阻抗工况下,负载力阻碍液压缸运动。为降低阀口节流损失,提高系统能效,此时的控制策略为:调节进油阀阀芯位移,实现液压缸位置控制;调节出油阀的阀芯位移,控制出油腔的压力处于较低值,从而减少出油口节流损失;调节伺服电机的转速,控制泵出口的压力,使得泵出口压力始终比进油腔压力高一个定值,实现负载敏感功能,减少进油口的节流损失。如图3所示。
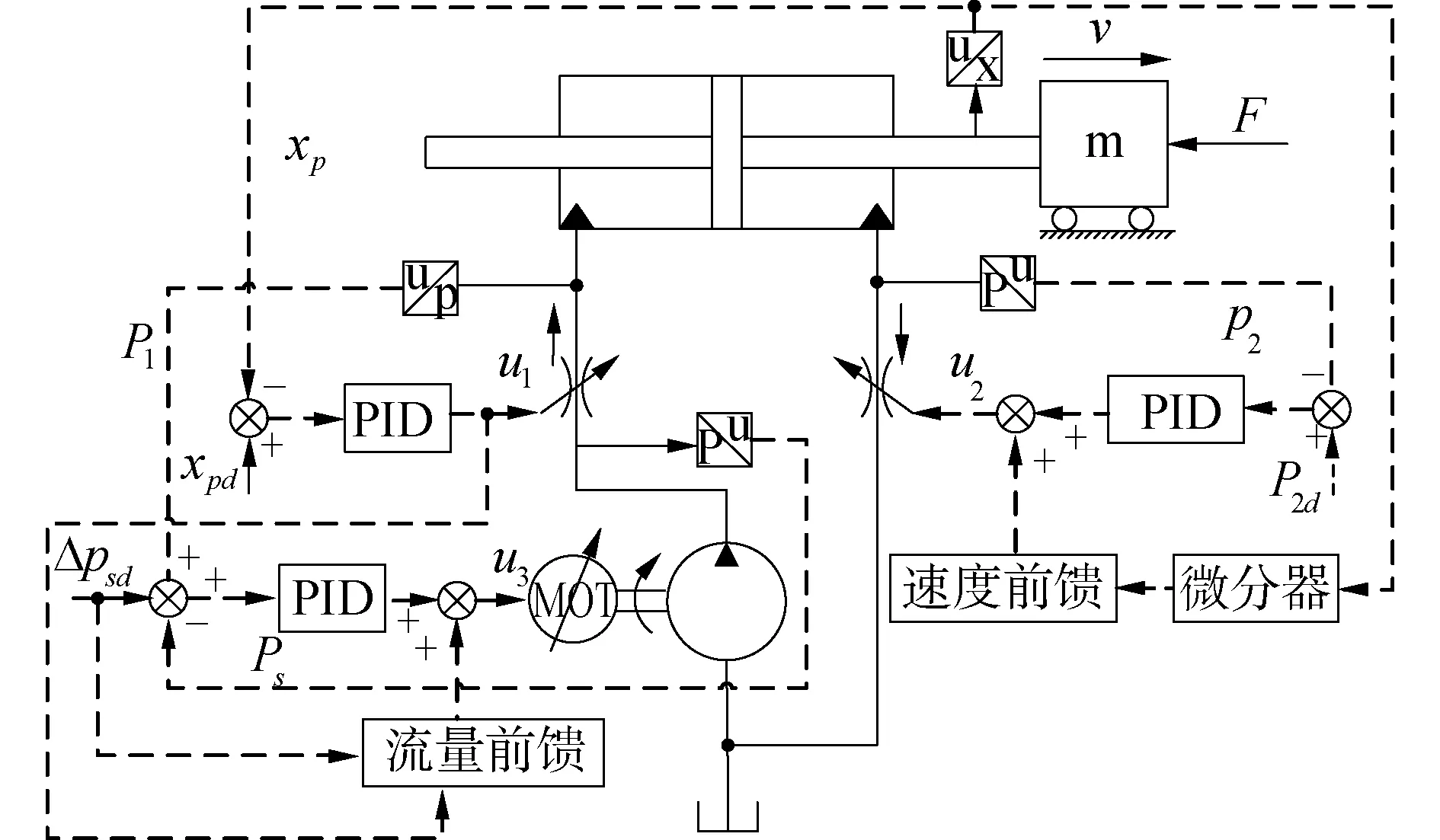
图3 阻抗伸出时系统控制原理Fig.3 Control principle of system of power extend
在超越工况下,为降低阀口节流损失以及提高系统稳定性。此时的控制策略为:调节出油阀阀芯位移,实现对液压缸位移的控制;进油阀全开,将进油阀处的节流损失降到最低;调节泵的转速,直接控制进油腔的压力使其处于较低值,避免产生气穴。如图4所示。

图4 超越缩回时系统控制原理Fig.4 Control principle of system of drive retraction
4种工况下,控制元件工作模式如表1所示。

表1 控制元件工作模式Table 1 Control element operating mode
系统实际工作时,液压缸工况判断过程如图5所示,将图中vd位移指令信号求导得到的速度信号,p1、p2为液压缸两腔的压力。
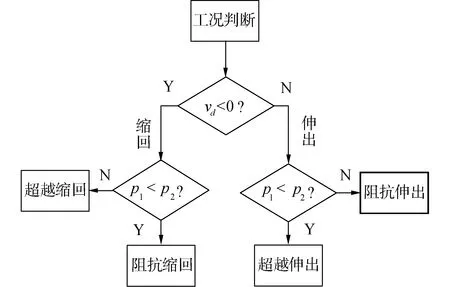
图5 根据速度和压力方向进行工况判断Fig.5 Working condition judgemen by the velocity and pressure
3 自抗扰控制器设计
3.1 自抗扰控制方法原理
自抗扰控制(active disturbance rejection control,ADRC)其核心思想是:首先将所有作用于系统的外部干扰和系统内部不确定性视为总扰动,利用扩张状态观测器(extended state observer,ESO)实时估计系统总扰动,然后通过扰动补偿律补偿“总扰动”,最后ESO观测到的系统状态进行误差反馈律设计,使得系统具有满意的闭环性能。自抗扰控制不需要测量外部扰动,也不需要了解扰动作用规律,仅需少量系统信息和系统的阶数,是一种抗干扰能力强、工程性很强的控制技术[14-15]。
3.2 降阶状态空间模型
根据奇异扰动理论忽略液压缸两腔动态,将阀控系统降阶成二阶系统并且实现了高精度的位置伺服控制。结合前文建模过程可以得到各个子系统降阶状空间模型:
(15)
式中:syspp代表泵控压力子系统;sysvx代表阀控位置子系统;sysvp代表阀控压力子系统。
3.3 自抗扰控制器设计
将泵控子系统模型改写成:
(16)
式中h(t)为泵控压力子系统总扰动的变化率。
根据式(16)设计扩张状态观测器和控制律:
(17)
线性误差反馈及扰动补偿:
(18)
式中:up为泵控压力ADRC的输出信号;pd为压力指令信号;ωpc为泵控压力子系统的带宽。


(19)
阀控位置ADRC和阀控压力ADRC的设计过程和泵控压力ADRC设计过程相同。
根据式(19)设计扩张状态观测器的控制律:
扩张状态观测器:
(20)
误差反馈及扰动补偿:
(21)
式中:uvx为泵控压力ADRC的输出信号;xd为位置指令信号;ωvc为阀控位置子系统的带宽。
阀控压力ADRC:

(22)
根据式(22)设计扩张状态观测器的控制律:
(23)
误差反馈及扰动补偿:
(24)
式中:uvp为阀控压力ADRC的输出信号;pd为压力指令信号;ωc为阀控位置子系统的带宽。
4 仿真结果与分析
基于转速调节负载敏感系统的原理图,在AMESim利用机械库、液压库建立基于转速调节的负载敏感系统仿真模型。建立仿真模型时考虑了泵源部分的机械动态,设置了伺服电机和定量泵的连接刚度、转动惯量以及粘性阻尼。仿真参数如表2所示。
4.1 系统特性仿真分析
4.1.1 阻抗工况
设定位置指令为xd=0.05t斜坡信号,压差指令设为2×106Pa 在2 s加入 1 000 N阶跃干扰力,来阻碍活塞运动。
从图6(a)可以看出,负载敏感系统工作时,液压缸实际位移和位移指令几乎重合,可以较好地跟踪位移指令。可以看出,在0~2 s时,系统没有加入外力,系统左腔压力和右腔压力均在2×106Pa左右,泵源输出的压力为4×106Pa,2个节流口的压差和压差设定值相等均为2×106Pa。在2~4 s时,系统加入1 000 N的阶跃力来阻碍液压缸运动,此时泵源输出压力增加了1.5×106~5.5×106Pa,左腔压力增加了1.5×106~3.5×106Pa,右腔压力仍为2×106Pa,2个节流的压降仍保持在2×106Pa。
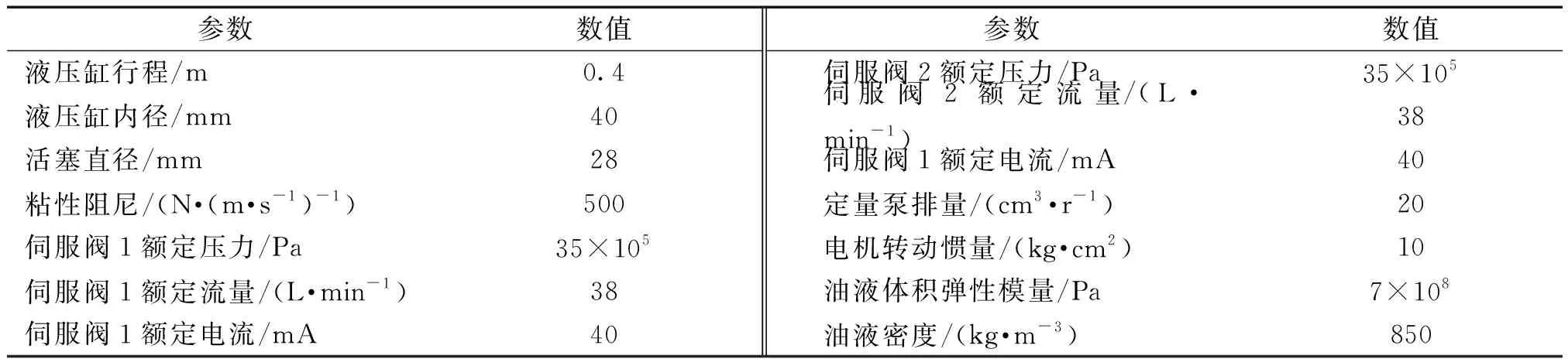
表2 仿真参数Table 2 Simulation parameters
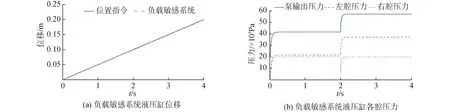
图6 阻抗工况下的负载敏感系统Fig.6 Load sensing system on power condition
从图7(a)可以看出,进出口独立调节负载敏感系统工作时,液压缸实际位移和位移指令几乎重合,可以较好的跟踪位移指令。在0~2 s时,进出口独立调节的负载敏感系统没有加入外力阻碍活塞运动,此时,系统左腔压力和右腔压力均稳定在1×106Pa,泵输出的压力稳定在3×10PPa 左右。左腔压力稍大于右腔压力,这是因为此时虽然没有加外力,但是活塞运动时仍需要克服粘性摩擦力和滑动摩擦力。在2~4 s时,加入1 000 N的力来阻碍活塞运动,此时右腔压力在短暂波动后仍稳定在1×106Pa,左腔压力的稳定在增加了1.5×106~3.5×106Pa,泵输出的压力也增加1.5×106~4.5×106Pa,左节流口的压降始终为2×106Pa,右节流口的压降始终为1×106Pa。
图7 阻抗工况的进出口独立调节负载敏感系统Fig.7 Load sensing system with independent metering on power condition
从前仿真结果可以发现,负载敏感系统相比,进出口独立调节负载敏感系统在阻抗工况下可以单独控制出油腔的压力在较低值。
4.1.2 超越工况
设定位置指令为xd=0.05t的斜坡信号,压差指令设为2×106Pa。在2 s时加入1 000 N的阶跃力来协助活塞运动。
从图8(a)可以看出,负载敏感系统工作时,液压缸实际位移和位移指令几乎重合,可以较好的跟踪位移指令。
从图8(b)可以看出,在0~2 s时,系统没有加入外力,系统左腔压力和右腔压力均在2×106Pa左右,泵输出的压力为4×106Pa,2个节流口的压差均在2×106Pa和压差设定值相等。在2~4 s时,系统加入1 000 N阶跃力来协助液压缸运动,此时右腔压力仍为2×106Pa,左腔压力减少了1.5×106~0.5×106Pa,泵输出的压力也减少1.5×106~2.5×106Pa。2个节流的压差仍为2.0×106Pa。

图8 超越工况下的负载敏感系统Fig.8 Load sensing system on power condition
从图9(a)可以看出,进出口独立调节负载敏感系统工作时,液压缸实际位移和位移指令几乎重合,可以较好地跟踪位移指令。在0~2 s时,进出口独立系统没有加入外力协助活塞运动,此时,系统左腔压力和右腔压力均稳定在1×106Pa左右力。在2~4 s时,加入1 000 N的力来协助活塞运动,右腔压力增加了1.5×106~3.5×106Pa,泵输出的压力和左腔压力基本相同稳定在1×106Pa,左节流口的压降基本为0,右节流的压降增大至1.5×106Pa。
图9 超越工况下的进出口独立调节负载敏感系统Fig.9 Load sensing system with independent metering on drive condition
从以上仿真结果可得,负载敏感系统相比,进出口独立调节负载敏感系统在超越工况下可以控制进油腔压力在稳定值,当协助活塞运动的外负载力增大时,出油腔的压力会增大来平衡负载力,进油腔压力仍稳定在指令值。
4.2 自抗扰控制器仿真分析
设定位置指令为0.05 sin(πt) m的正弦信号,仿真时模拟液压缸推动负载竖直升降工况,规定向上运动为正,向下运动为负。设定压力指令为1×106Pa,压差指令为2×106Pa。
4.2.1 压力ADRC仿真分析
为了测试压力ADRC的性能,与PID控制器进出对比。从图10(a)可以看出,在0~0.5 s、1.5~2.5 s、3.5~4 s系统处在阻抗伸出工况时,进油腔压力稳定在3.0×106Pa左右,泵控压力ADRC控制泵源压力稳定在5×106Pa,始终比进油腔压力高2×106Pa。在0.5~1.5 s、2.5~3.5 s超越缩回工况时,泵控压力LADRC控制泵源压力稳定在1.0×106Pa。
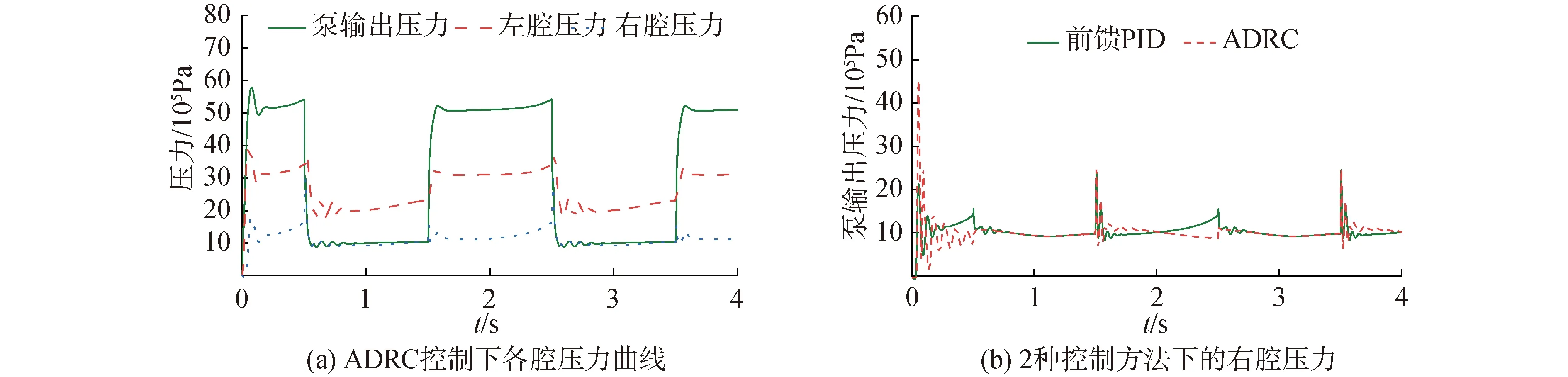
图10 压力ADRC仿真分析Fig.10 Simulation analysis of pressure ADRC
从图10(b)可以看出,PID控制时右腔压力在5×105~3.5×106Pa之间波动,ADRC控制时右腔压流稳定在1×106Pa左右。
从上面的仿真结果发现自抗扰控制器可以补偿补偿活塞速度变化对压力控制的干扰。
4.2.2 位置自抗扰控制器仿真分析
为了测试阀控位置自抗扰的控制器的鲁棒性,加入频率为0.5 Hz幅值500 N的正弦干扰力。
从图11(a)可以看PID控制下系统的位置跟踪误差在-0.004 5~0.005 m内波动,ADRC控制下位置跟踪误差在-0.003~0.003 m内波动,ADRC的控制下系统的跟踪误差明显小于PID。加入干扰力后,PID控制下的位置跟踪误差变大在-0.006~0.005 5 m内波动,LADRC(linear active disturbance rejection control)控制器的位置跟踪误差仍-0.003~0.003 m内波动。
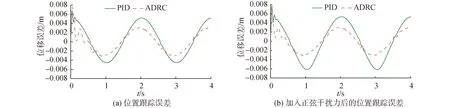
图11 位置ADRC仿真分析Fig.11 Simulation analysis of pressure ADRC
从上面的仿真结果发现阀控位置自抗扰控制器可以补偿变化的干扰力对位置控制的干扰,并且其跟踪误差比PID控制器小。自抗扰控制器的控制精度比PID的控制精度高。
为测试位置自抗扰控制器在大干扰力工况下的鲁棒性,在原有给定的正弦位移信号下,分别将干扰力改为频率为0.5 Hz幅值2 500、5 000 N时,输出位移与正弦位移信号的比对图如图12。
从图12可以看出,将干扰力幅值从增加至2 500 N和5 000 N时,位置自抗扰控制器能够承受住大干扰。在进出口独立调节负载敏感系统的控制策略下,系统抗干扰能力取决于压力伺服阀提供的背压大小。当背压指令不变时,对比图12(a)和图12(b):当干扰力与背压相差较大时,控制器抗干扰能力强。增加背压的大小可以大大提高控制器的鲁棒性,但系统的能耗会随着伺服阀节流压力的增大而增加。

图12 不同干扰力下的仿真分析Fig.12 Simulation analysis in different disturbance force
从以上对位置自抗扰控制器的仿真结果分析可见:自抗扰控制器的控制精度优于PID控制器;位置自抗扰控制器具有较好的鲁棒性:系统所能提供的背压越大,抗干扰能力越强。
5 结论
1)与负载敏感系统相比,进出口独立调节的负载敏感系统实现2个节流口的解耦:在阻抗工况下,可以单独控制出油腔的压力在较低值,进一步降低出油口的节流损失;在超越工况下,可控制进油腔的压力在稳定值,避免进油腔过低产生气穴。
2)相比与PID控制器,自抗扰控制器只需了解很少的系统信息就可以补偿系统的未知不确定性和干扰,有着更高控制精度和更强的鲁棒性。
猜你喜欢
鞍钢技术(2022年3期)2022-06-12
科技创新与应用(2022年14期)2022-06-02
油气·石油与天然气科学(2021年12期)2021-12-11
学校教育研究(2020年11期)2020-06-08
宇航学报(2020年4期)2020-05-21
航空科学技术(2019年2期)2019-09-10
科学与技术(2019年12期)2019-03-29
科技与创新(2019年2期)2019-02-14
科技与创新(2018年9期)2018-05-07
中国高新技术企业(2017年11期)2017-07-08
