
速度影响下次近邻车辆换道安全性分析
2021-12-23 03:07:14鹿心宁傅白白李树彬
山东建筑大学学报 2021年6期
鹿心宁傅白白李树彬
(1.山东建筑大学 交通工程学院,山东 济南250101;2.山东建筑大学 建筑城规学院,山东 济南250101;3.建筑与城乡空间设计数字仿真山东省高校重点实验室,山东 济南250101;4.山东警察学院 交通管理工程系,山东济南250014)
0 引言
跟驰和换道是车辆在道路行驶中难以避免的驾驶行为。换道是驾驶员为达到特定行驶目的,通过观察周边车辆行驶情况和道路交通环境,进行综合判断并调整驾驶操作以完成车道变换的行为,与跟驰行为相比更为复杂[1-3]。在换道过程中,驾驶员需要观察分析自身车辆前后方和侧向区域内的道路状况,并对自身与周围车辆的相对运动关系及发生碰撞的可能性做出正确的判断。
次近邻车辆是影响驾驶员驾驶行为的重要因素。在现有换道安全性的研究中,通常仅考虑换道车辆与直接相邻车辆之间的相互影响,未考虑对其次近邻车辆安全造成的影响,默认在换道过程中未与周边直接相邻车辆发生碰撞即为安全换道。在实际驾驶过程中,特别是在交通流密度大、车辆间距较小的拥堵情况下,面临前车发生换道的情况,直接相邻车辆仅依据前车行驶状况采取避让措施,而不会顾及后续车辆;次近邻车辆驾驶员虽有观察前车行驶状况的意识,却常因未能及时预判前车运动趋势或误判而无法及时做出减速措施,进而导致不良后果,这也是实际道路中追尾交通事故发生的重要原因之一。在换道过程中,次近邻车辆受到换道车辆、直接相邻车辆共同影响。因此,研究次近邻车辆换道安全具有重要意义。
近年来,换道行为对交通安全的负面影响日益受到关注[4-6]。在现有的换道影响研究中,对于安全性的研究占多数,不恰当的换道行为不仅会使其后续车辆面临碰撞风险,同时会引起该车道交通流量下降,影响通行效率。换道影响中的安全性研究对于交通安全事故的预防及提升道路交通流效率具有重要意义。LI等[7]利用原车道和目标车道上的换道速度、间距和加速度等微观交通变量预测了摩托车、卡车、乘用车的碰撞风险。YANG等[8]通过速度变化率、刹车时间和碰撞时间,研究了换道车辆后车的刹车特征和可接受换道间距。孔宪娟等[9]利用元胞自动机描述了考虑次近邻车辆的拥堵交通流,并模拟出了次近邻车辆影响下拥堵的产生及消散的过程。ZHAO等[10]构建了次近邻车辆影响下的复杂网络,运用拓扑结构分析了次近邻车辆影响下交通动态演化特征。可见,目前对于换道安全的研究多数集中在换道车辆本身和直接相邻车辆之间的相互作用,没有将次近邻车辆考虑在影响范围内,对于次近邻车辆的研究没有探讨其安全问题。因此,采用数据分析方法,分析了次近邻车辆安全问题,建立起速度指标与次近邻车辆安全间的关联性。
1 次近邻车辆换道影响阶段及参数分析
为了明确换道行为对后车产生的影响,将换道过程分为Ⅰ、Ⅱ两个阶段。如图1所示,第Ⅰ阶段是自换道车辆(Lane Changing Vehicle,LCV)在原车道发生车头偏转至其在目标车道被识别,此阶段标志着换道行为的开始,该阶段直接相邻车辆(Following Vehicle,FV)开始采取减速措施。在第Ⅰ阶段换道车辆未在次近邻车辆可观察的范围内,即次近邻车辆无法根据换道车辆调整自己的驾驶行为。第Ⅱ阶段称作趋于稳定阶段,在此阶段,换道车辆开始采取相应加减速措施以进一步实现在目标车道的驾驶目的,此时次近邻车辆(Next-nearest Following Vehicle,NFV)受到换道车辆传递的干扰,需感知前方车辆信息,以实现最终稳定的驾驶状态。在第Ⅱ阶段换道车辆、直接相邻车辆均对次近邻车辆产生影响。
在实际交通流中,考虑到驾驶安全的因素,驾驶员通常会根据前车的速度变化和前车与自身车辆的距离来改变自己的行驶速度,因此次近邻车辆在下一时刻的速度主要取决于其本时刻的速度、与前车的速度差、车头间距[11];针对次近邻车辆进行换道安全分析,考虑到次近邻车辆受前面两车共同影响,故将换道车辆在换道初始状态的速度、换道间距考虑在内。文章选取车辆速度、相邻车辆速度差和车头间距等参数用于分析,如图1所示。其中,v1(t)为换道车速度,m/s;v2(t)为直接相邻车辆速度,m/s;v3(t)为次近邻车辆速度,m/s;Δv1(t)为换道车与直接相邻车辆速度差,m/s;Δv2(t)为次近邻车辆与直接相邻车辆速度差,m/s;Δx1(t)为直接相邻车辆和换道车之间车头间距,m;Δx2(t)为次近邻车辆和直接相邻车辆之间车头间距,m。

图1 换道过程中换道车辆与次近邻车辆关系图
2 次近邻车辆数据收集和处理
现使用的下一代仿真(Next Generation Simulation,NGSIM)数据已广泛应用于各种交通流研究[12-14]。选取其中的I-80数据集,共有45 min的数据,分为3个15 min的时间段:16时至16时15分,17时至17时15分,17时15分至17时30分。这些时间段代表了路况从非拥堵状态到高峰期完全拥堵状态的变化。采集点位于美国加利福尼亚州埃默里维尔市旧金山湾区的I-80号公路上,采集长度为500 m,由6条高速公路车道组成,其中包括一条高占用率车道和一个入口匝道。
基于计算机编程语言Python的集成开发环境PyCharm和包管理工具Anaconda平台,从原始数据中,经初步处理得到了317组含有次近邻车辆的换道数据。初步处理即完成以下步骤:
(1)保留在数据记录时间内车道ID不唯一的车辆;
(2)仅选用车辆类型为小汽车的数据;
(3)剔除在数据记录时间内无后车的车辆;
(4)剔除与后车在相近时间内同时换道的车辆。
基于以上步骤,可以得到基本符合条件的换道车辆数据组,为保证用于分析的车辆轨迹数据包含充足、准确的换道信息,进一步处理原则如下:
(1)保证换道过程记录在时间上的完整性,剔除换道车辆中换道时间跨度过大的异常值;
(2)观察次近邻车辆在换道发生后的驾驶特性,需选取换道事件发生后,次近邻车辆仍然保持跟驰状态的车辆组;
(3)换道起止时刻信息需对应,剔除次近邻车辆未在换道起止时刻被记录的车辆组;
(4)为消除匝道影响,不考虑5、6、7车道的换道车辆;
(5)考虑换道过程中潜在的安全问题,仅考虑后车速度大于前车速度的车辆组。
筛选次近邻车辆信息流程如图2所示,经二次筛选得到201组符合要求的换道车辆组数据。观察得出,换道车辆被识别为换道至趋于稳定状态时长约为10 s,因此每一组数据分别包含换道车辆、直接相邻车辆、次近邻车辆在10 s内的轨迹数据。
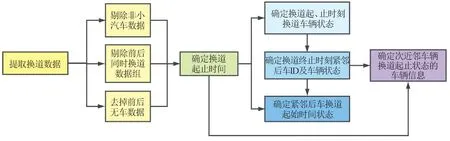
图2 筛选次近邻车辆信息流程图
依据NGSIM数据提供的信息,可以获取车辆编号、时间、瞬时速度、车头间距和车头时距等参数。所用参数的统计值见表1,由于所用数据包含拥堵时段,因此速度均值较小。标准差较大,说明所用数据各车辆间差异性较强。

表1 影响次近邻车辆换道安全参数的统计值表
3 速度影响下次近邻车辆安全性分析
在跟驰状态下,基于换道过程中车辆驾驶策略实时发生变化这一假设,可知前方车辆的速度是后方车辆调节自身运动所参考的重要信息。当后方车辆感知前车速度大于自身车速时,通常采取加速措施以便更紧密地跟随前车;反之,则会减速与前车保持一定安全距离,以达到避免追尾碰撞的目的。这表明,后车对前车的速度感知会影响交通流的稳定性。在实际换道行为中,次近邻车辆受到换道车辆及直接相邻车辆的共同影响,当次近邻车辆感知前车的速度后,是否能够及时采取有效的安全避让措施决定了次近邻车辆的安全性,同时也能够说明此次换道事件的合理性。
3.1 次近邻车辆对速度变化强度的响应
引入换道车辆的速度变化强度(Intensity of Velocity Variation,IVV)作为次近邻车辆的分析指标。速度变化强度定义为在换道过程始末时刻速度变化量与换道时间的比值,由式(1)表示为

式中vr为换道车辆被识别为换道时刻的速度,即换道车辆的换道初始速度,m/s;vs为换道车辆换道稳定时刻的速度,m/s;t为该时段所经历的时间,s。
分析减速条件下换道车辆的速度变化强度对次近邻车辆的影响,还需借助换道车辆的换道初始速度。两值分布情况如图3所示,由此可以看出,88.9%的vr值<10.5 m/s、49.6%的vr值<5.5 m/s,而88.4%的IVV值<0.5 m/s2。
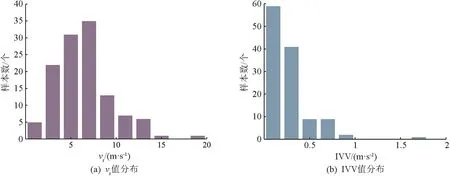
图3 vr和IVV值分布图
3.1.1 次近邻车辆速度变化
通过分析201组换道事件,可以看出换道车辆驾驶员往往通过强制直接相邻车辆减速来完成换道,次近邻车辆感受到前车减速后也会采取相应的减速措施。为更清楚地观察次近邻车辆面临前车换道做出的速度响应,按照速度变化强度以及换道初始速度将换道数据分类,分类依据参照换道初始速度值和速度变化强度值分布。分析可知,换道初始速度与速度变化强度对次近邻车辆均有影响,其中速度变化强度是主要影响因素。当IVV>0.5 m/s2时,换道发生后次近邻车辆的速度变化多数趋于稳定;当IVV≥0.5 m/s2时,换道初始速度对次近邻车辆影响较大,次近邻车辆速度变化幅度大且到达稳定的时间较长。直接相邻车辆与换道车辆的速度曲线变化较为相近,这表明直接相邻车辆较次近邻车辆能够更加直接、准确地感知换道车辆的驾驶情况。各类数据中随机选出的车辆对应的速度变化图像如图4所示。
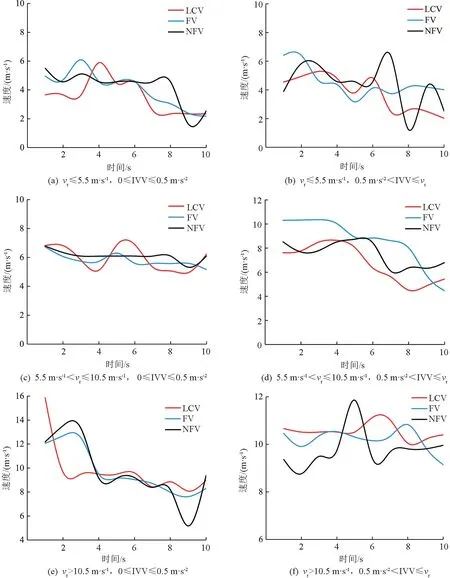
图4 LCV、FV、NFV速度变化图
3.1.2 次近邻车辆车头时距响应
在正常的驾驶状况下,驾驶员依据前车速度,实时调整自身驾驶速度,以保持紧密且安全的跟驰状态。换道行为作为交通流的干扰因素,一旦发生,将会引起后车的震荡、弛豫等消极影响。车头时距表示前后两辆车的前端通过同一地点的时间差,是评价驾驶安全性的重要指标,与交通流组成、驾驶行为密切相关。
图5表示在不同速度变化强度条件下,NFV、FV车头时距与速度差的关系。NFV车头时距表示次近邻车辆与直接相邻车辆之间的车头时距,FV车头时距表示直接相邻车辆与换道车辆之间的车头时距。图5(a)给出了177组满足0≤IVV≤0.5 m/s2条件的NFV车头时距与相应速度差的关系,速度差表示后车速度与前车速度的差值,需满足后车速度大于前车速度。从总体趋势上看,随着速度差增大,NFV车头时距增大,其最大值不超过8 s。图5(b)给出相同条件下,FV车头时距与相应速度差的关系,对比NFV和FV,在换道过程中,当速度差较小时,NFV车辆个体间车头时距变化更加不均匀。满足IVV>0.5 m/s2条件的跟驰组也满足这一趋势,如图5(c)和(d)所示,原因为直接相邻车辆可以直观地依据前车驾驶行为及时地采取措施,而次近邻车辆不能及时感知换道车辆速度变化,且受到前车驾驶行为差异性的影响,导致个体间车头时距呈现不均匀特征。对比图5(a)和(c),可以得出次近邻车辆在不同速度变化强度下的车头时距情况,满足0≤IVV≤0.5 m/s2条件的次近邻车辆均值为3.02 s,满足IVV>0.5 m/s2条件的次近邻车辆均值为3.80 s;而图5(b)和(d)中,直接相邻车辆车头时距均值分别为3.28和3.34 s。由此可知,速度变化强度对于次近邻车辆车头时距影响更明显。
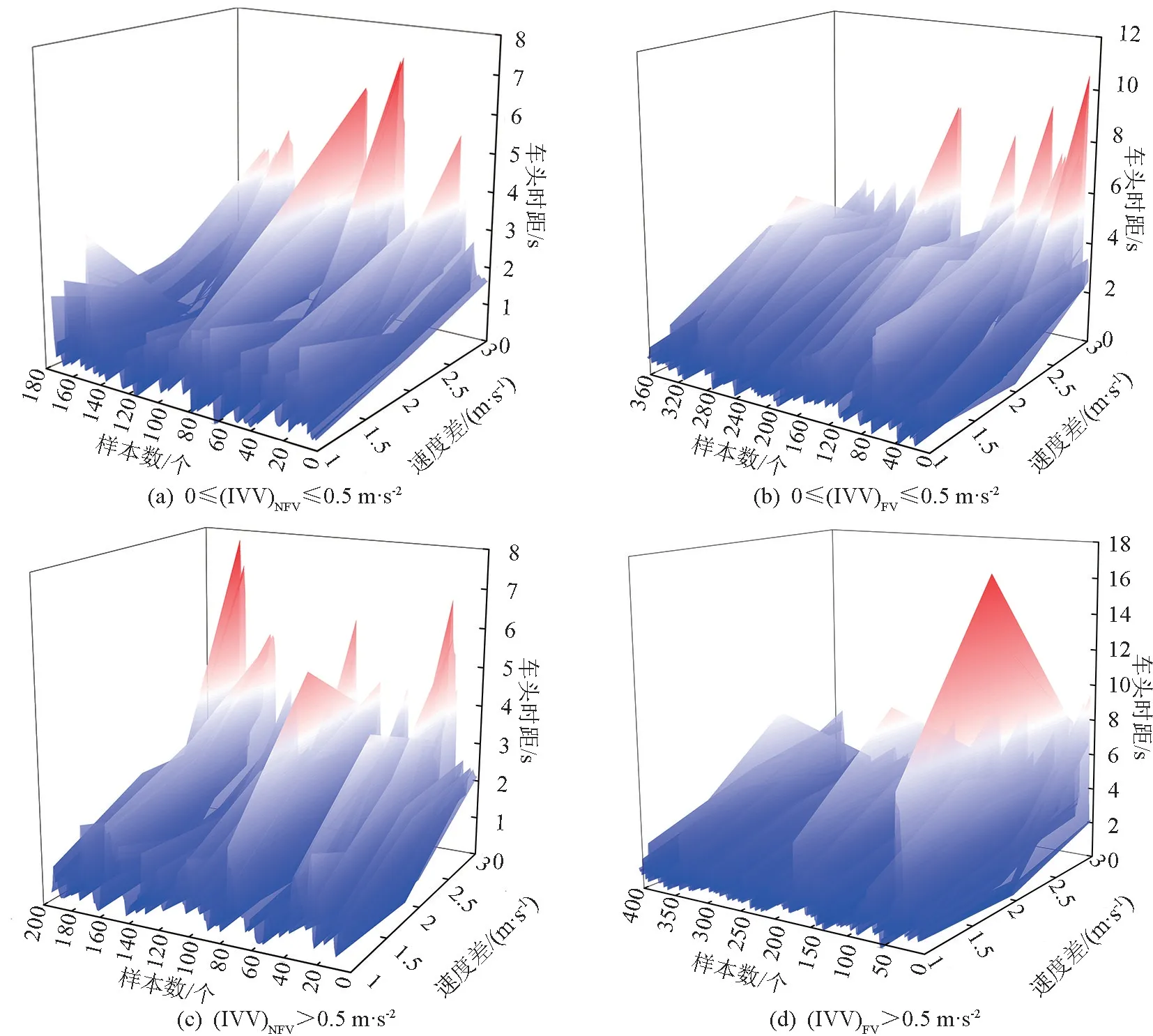
图5 不同速度变化强度下FV、NFV车辆的车头时距随速度差变化图
上述现象符合实际驾驶情况,当次近邻车辆驾驶员感受到本身车速大于前车车速时,会降低速度以防止碰撞,但由于驾驶员的感知受前两车共同影响,存在感知误差,导致车头时距变化没有明确的规律性。因此,分析车头时距与速度差之间的关系便于进一步提升次近邻车辆安全。
3.2 次近邻车辆的刹车响应
YANG等[8]通过对驾驶员的刹车响应分析得出变道对直接相邻车辆的影响,44.0%的直接相邻车辆驾驶员在换道车辆跨越车道线前就采取刹车措施,14.1%的驾驶员在换道车辆进入目标车道后采取刹车措施,41.9%的驾驶员选择不采取任何措施。通过NGSIM数据观察次近邻车辆的刹车响应情况,可知在换道发生的第Ⅰ阶段,次近邻车辆已有明显的刹车现象。
采用替代安全措施(Surrogate Safety Measures,SSMs)中的避免碰撞的减速率(Deceleration Rate to Avoid Collisions,DRAC)指标,进一步探究次近邻车辆刹车的安全性。DRAC表示在单位时间内,后车为避免与前车发生碰撞所减少的速度值,该指标考虑了速度差异和减速措施在碰撞发生中的作用,表示为时间及空间的函数。
仅考虑车流方向的DRAC值,所选取数据需满足后车速度大于前车,即存在碰撞风险的跟驰组合。以计算次近邻车辆的DRAC值为例,计算式由式(2)表示为
式中vNFV、vFV分别为次近邻车辆、直接相邻车辆的速度,m/s;G为两车之间的间距,m;k为某一时刻。由式(2)中可以看出,DRAC值不仅与前后两辆车的速度差有关,同时也与两车车头间距有关。
直接相邻车辆和次近邻车辆DRAC值的分布情况如图6所示,相应统计结果见表2。可知直接相邻车辆和次近邻车辆的DRAC值分布相差较小,且均在安全范围内。

图6 FV、NFV的DRAC值分布图

表2 FV和NFV车辆的DRAC频率分布表
交通工程师学会建议汽车的最大减速率为3.0 m/s2,高速公路协会建议舒适减速率为3.4 m/s2,美国环保署标准的“城市”和“公路”轻型汽车的最大减速率均为1.5 m/s2[15]。
如图7所示,对次近邻车辆进行换道间距敏感性分析,其扰动设置为在换道均值(Mean)的基础上减少、增加0.1倍的标准差(Standard Deviation,SD),以确保变量的变化在合理范围内(较大的扰动可能导致不符合现实的变量值)。发现在DRAC<3.4 m/s2范围内,曲线呈单调递减趋势,说明换道间距越大,次近邻车辆到达碰撞所需的减速率越小,这与实际驾驶情况相符。

图7 FV、NFV随换道间距变化的DRAC值图
4 结论
引入速度变化强度概念,结合换道车辆的初始换道速度,分析了次近邻车辆速度变化、车头时距变化、刹车响应,建立速度变化强度、初始速度、速度差与次近邻车辆安全性之间的关系。由此得出以下结论:
(1)在换道发生后的一段时间内,次近邻车辆受到换道车辆和直接相邻车辆的共同作用。相较于直接相邻车辆,次近邻车辆对于速度变化强度影响更明显,该影响体现在次近邻车辆的车头时距和速度变化,次近邻车辆驾驶员的感知误差是导致次近邻车辆不安全因素的重要原因。
(2)为提升换道事件中次近邻车辆的安全性,应使次近邻车辆及时、准确获取前车信息以保持车辆的稳定控制。所需获取的前方车辆信息包含车辆速度、相邻车辆速度差和车头间距等参数。
猜你喜欢
测试技术学报(2023年2期)2023-04-06 04:38:30
人类工效学(2021年5期)2022-01-15 05:06:30
军事文摘(2020年24期)2020-02-06 05:56:58
绥化学院学报(2019年10期)2019-10-12 01:08:12
心理科学进展(2018年8期)2018-02-21 18:32:04
中国老区建设(2016年4期)2017-01-15 13:53:45
人民交通(2016年9期)2016-06-01 12:19:39
心理科学进展(2015年5期)2015-02-26 07:07:54
大连交通大学学报(2012年2期)2012-07-02 03:25:54
中学生数理化·高一版(2008年6期)2008-11-15 07:30:48
