跨介质航行体流体动力调控研究进展及新构想
2021-12-23 11:18辛万青魏海鹏尤天庆
导弹与航天运载技术 2021年6期
辛万青,黄 彪,魏海鹏,郝 亮,尤天庆
(1. 中国运载火箭技术研究院,北京,100076;2. 北京理工大学,北京,100081;3. 北京宇航系统工程研究所,北京,100076)
0 引 言
航行体跨介质飞行是先后经历水中高速航行、穿越水空界面和空中飞行的复杂过程,其中由水到气的跨介质过程是衔接水下和空中飞行的关键环节。空泡多相流动是航行体水中运动和跨介质出水过程最重要的物理现象,受外界时变环境的影响,其演化规律和力学效应十分复杂。首先,在航行体水下高速运动过程中,来流条件和环境压力不断变化,可能产生空泡断裂和脱落等流动现象,空泡多相流演化呈现强烈的非定常特征;再者,在跨介质出水过程中,环境介质条件突变,空泡在短时间内发生溃灭,对航行体产生剧烈变化的冲击压力作用[1]。航行体跨介质飞行的出水载荷响应和运动姿态呈现高量值、强离散特征,通过流动调控技术,提高航行体的水中环境适应性,保持以较低的载荷和较小的姿态安全出水,从而实现降载增稳,是先进跨介质航行体流体动力设计的首要目标。
流动控制是流体力学领域最重要的研究方向之一。在一定环境条件下,认清流动演化机理,掌握流动调控机制,建立相应的控制方法,是实现流动控制的核心关键。在航行体空泡流控制中,降载增稳是研究的主要关注点,通气和水动舵翼是主要调控手段。通气控制的关键在于掌握通气空泡形态和稳定性变化机制,舵翼控制研究集中于舵翼效能及控制方法,目前已有定流量通气开环调节[1]以及小攻角、低航速的舵翼控 制[2],在受限环境条件下取得了较好的降载增稳效果。但针对大水深发射、水下长时间运动的跨介质航行体,环境压力变化范围和水下运动时间的成倍增加,空泡流动的非定常特性进一步增强,势必导致载荷不确定性和运动姿态的离散性陡增。针对跨介质航行体在超常规恶劣环境下的适应性难题,需要探索更为先进的流动控制方法,闭环控制是一个具有发展潜力的重要研究方向。
本文系统总结了跨介质航行体空泡流动的流体动力特性,综述了水下航行体流体动力调节技术及其控制策略,提出了一种以空泡多相流控制为主、水动舵翼控制为辅、与航行体响应耦合的闭环控制新构想,并剖析了该闭环控制方法的难点与关键技术。
1 跨介质航行体空泡流体动力特征
跨介质航行体一般在水下一定深度,由气体弹射加速至较高的运动初始速度,航行体物面大曲率变化部位的静压显著降低,导致水汽化形成自然空泡,同时,管内气体也会被卷吸而附着于航行体,从而形成闭合在航行体物面的含气空泡。空泡的水下非定常演化以及出水非线性溃灭,是跨介质航行体空泡流动的主要物理现象。
1.1 航行体水下空泡多相流非稳定特征
航行体在水下运动过程中,随着运动速度和深度变化,低压区域不断增大,附着在航行体表面的空泡向尾部不断发展。空泡末端闭合至物面,形成局部高压,称之为回射压力,如图1所示。随着空泡发展,高压区域的位置逐渐后移。受攻角的影响,航行体迎、背流面空泡不对称,对航行体的运动姿态产生显著影响。在空泡整体流态表现上,航行体附着空泡呈现强烈的非稳定性,存在空泡断裂和脱落现象,从而使航行体受力的不确定性大为增加。
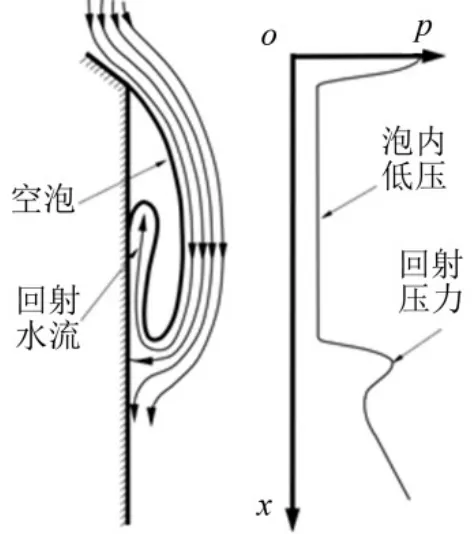
图1 回射流和压力分布示意Fig.1 Schematicsof Re-Entrant Jet and Pressure Distribution
空泡非稳定性根据其产生机制可分为内在非稳定性和系统非稳定性[3,4]。内在非稳定性源于空泡自身,指回射流引起空泡长度振荡的不稳定性。系统非稳定性源于空泡与周围环境(来流条件等)的相互作用,外界环境的扰动将加剧空泡的非稳定性。关于空泡多相流非定常特性的研究,最有代表性的成果是对回射流的认识:空泡的末端与壁面之间存在与主流流动方向相反的回射流,当回射流运动到空泡前缘时造成空泡的断裂和脱落[5~8]。近年来,在实验中发现了另一种非稳定性机制,即水汽激波机制[8]。在空化流场中,水汽掺混区的声速大幅降低,可能产生的水汽激波导致空泡快速溃灭,从而引起空泡断裂及脱落[9],该过程伴随着短时性、高幅值的压力脉冲[10,11]。
环境压力和水深是影响航行体空泡“系统非稳定性”的主要因素。当环境压力大范围变化时,空化数的变化范围相应增加,引起空泡多相流态的改变。水下运动时间增长,使回射流发展更为充分,导致空泡非稳定性进一步加大。除此之外,波浪等外界扰动导致空泡的非稳定性和非对称性增加,航行体响应的离散性显著提升。
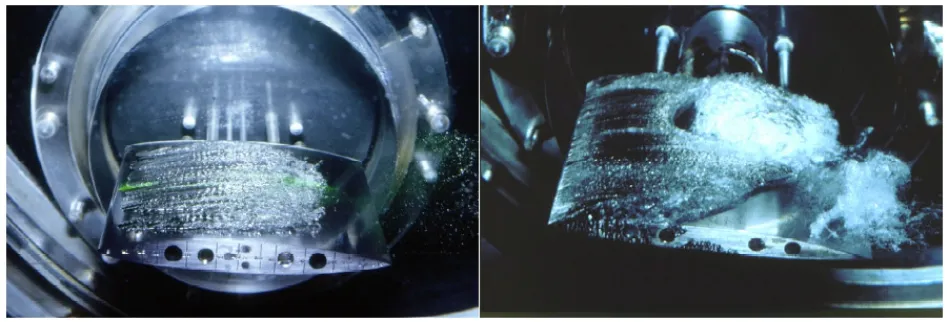
图2 稳定与非稳定空泡Fig.2 Stable and Unstable Cavity
近年来,国内外学者针对航行体空泡流的非稳定特征进行了研究,取得了一定的成果,但相关实验研究主要以传统高速摄像为基本手段,缺乏对空泡内部介质特性和流场特征的详细认知。同时,跨介质航行体空泡的非定常演化过程,受外形、运动初始条件、泡内气体含量等因素的综合影响,流动更为复杂,准确认知尚有很大难度。
1.2 航行体出水空泡溃灭特征
跨介质航行体出水过程中,附着空泡失去维持自身形态的环境条件,发生溃灭。由于空泡内部压力小于水面大气压力,附着水体在压差的驱动下撞击航行体表面,产生溃灭压力。随着航行体的出水,溃灭压力不断向下游传播,空泡溃灭形成的高量值压力会造成大的出水载荷,并引起航行体姿态离散性加剧。
针对空泡溃灭,研究对象多为静水中孤立气泡以及云状空泡。研究表明云状空泡溃灭会产生压力脉 冲[12],脉冲时间跨度在微秒量级,幅值可以达到30个大气压[9]。航行体跨介质出水过程的大尺度空泡溃灭,受泡内压力、空泡形态、运动姿态以及水面波浪状态等因素影响,溃灭过程呈现强离散特性。相关工程研究团队开展了大量试验研究,建立了空泡溃灭过程计算模型,获得了对空泡溃灭宏观流动机理和特性的基本认识。随着水深变化幅度增加、自由面扰动加剧,出水前空泡呈现出更多样的流态,空泡的溃灭过程和压力特征表现出更强的离散性,研究难度更大。
2 航行体流体动力调节方法
无论是全沾湿流动还是多相流动,航行体流体动力多为静不稳定状态,航行体所受载荷和运动姿态呈现出强不确定特征,从而可能危及航行体安全。解决该问题的主要手段是对流态实施主动调节,目前主要流动调节手段包括通气控制和水动舵翼控制,控制策略包括开环调节和闭环控制。
2.1 通气流动控制技术
早期通气流动控制主要应用于水下高速航行体减阻[13~15],即向航行体附着的自然空泡内通气,产生稳定的通气空泡包裹航行体,减小水下摩阻。国内外研究人员就通气空泡形成过程中涉及的物理现象展开了研究。实验研究主要聚焦于以圆盘和圆锥空化器为对象的水洞机理实验[16,17],重点关注超空泡阻力特性的变化规律:随着通气量的增加,通气空泡的稳定性逐渐增强,空泡流动的非定常特征减弱,直至发展为超空泡。数值研究主要聚焦于通气空泡的流动特性[18,19],重点关注回射流的发展过程和变化规律:回射流从空泡末端向空泡前端推进,造成空泡脱落;随着通气量的增加,回射流逐渐减弱,通气空泡非定常特性减弱。在理论研究方面,通过对通气超空泡流动的研究,建立了与空化数相关的空泡宏观形态计算半经验公式,阐明了通气空泡尾部存在回射流和双涡管等不同泄气方式[20~24]。
针对跨介质航行体流动控制,本文提出了基于通气的空泡流态调控技术。在水下向空泡内通气,通过调节空泡流态,增强了空泡的内在稳定性;利用调节后的空泡末端回射压力,提高了航行体姿态稳定性;同时,通气提高了出水空泡内部压力,降低了空泡溃灭压力量值,减小了对航行体的冲击载荷作用。
2.2 水动舵翼控制技术
在水下航行体控制领域,水动舵翼控制技术率先在鱼雷和水下无人航行器中应用。在全湿流动状态下,舵翼控制技术的应用使得水下航行器的稳定性显著提升[25]。当水下航行体运动速度提高到一定程度时,舵翼低压区发生空化,沾湿区域减小,使得舵翼的控制力减弱[26]。在水下空泡覆盖航行体状态下,水翼仅能部分沾湿,控制效果也会受到一定影响。即使如此,得益于水动舵翼控制的快速响应特性,水动舵翼在一定程度上仍能对航行体运动姿态和轨迹进行控制[2,27~29],从而提高航行体在空泡流条件下的运动稳定性。
2.3 水下航行体流体动力控制策略
基于以上流体动力调节手段,目前工程上有两种典型的水下航行体流体动力控制策略,分别为基于通气的流态开环控制和基于翼舵的姿态闭环控制,如图3所示。在开环控制策略中,被控对象状态不影响控制器与执行器的运行。以开环通气控制为例,虽然环境压力等因素的变化,使得航行体附着空泡形态和流体动力发生变化,但是通气参数不会随之改变。闭环控制策略将被控对象的状态作为反馈信息,输入至控制器中,控制器生成控制律,通过执行器的运行实现被控对象状态的改变。以水动舵翼闭环控制为例,航行体的姿态作为主要被控对象,航行体尾舵作为主要执行器,而环境信息和航行体的运行姿态作为主要反馈变量,航行体的预期状态作为主要输入变量。在这个过程中,航行体时刻根据自身的姿态,按照特定的控制律实时调整尾舵舵角,实现航行体受力状态的改变,进而改变航行体自身的姿态。
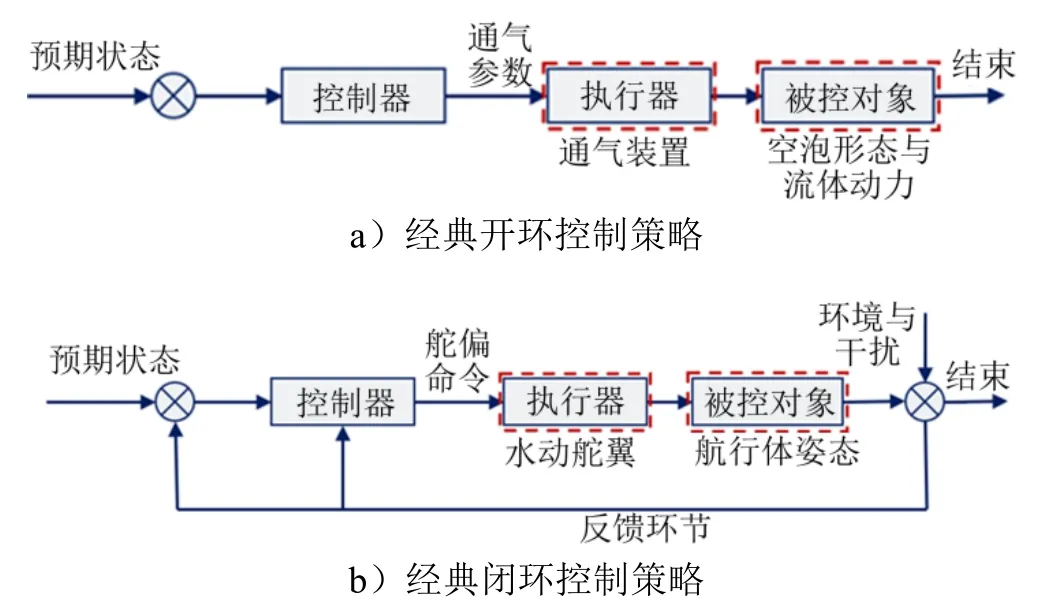
图3 经典控制策略示意Fig.3 Schematicsof the Typical Control Methods
对比两种控制策略,对同一种被控对象,一般而言,闭环控制效果远好于开环控制,但实现难度更大。开环控制措施相对固定,其控制效果容易受流动状态变化的影响,当流动状态发生变化后,控制能力会显著下降,例如,在湍流流动控制中,湍流的随机性会减弱开环控制的效果[30,31]。闭环控制策略是一种具有更强适应性、更好稳定性以及更高效率的实时动态控制策略[31,32],其优势在于能够在航行体运动过程中,根据实际运动状态和环境信息实时对姿态进行调整,因而可以获得更为理想的控制效果。因此,研究跨介质航行体闭环控制策略具有重要意义。
2.4 水下超空泡航行体流体动力控制方法
针对直航状态下的超空泡航行体流体动力控制方法,国内外众多学者进行了研究。Dzielski等[27,28]以无尾翼的超空泡航行体为基准模型,基于闭环控制策略的构想,提出了以超空泡航行体空化器和尾部沾湿区作为耦合控制面的状态反馈控制律,能够获得超空泡航行体经典的直航运动模式。在此基础上,Lin等[33,34]提出采用函数法对不连续、非线性的滑行力进行光滑处理,并调节了航行体碰撞空泡上下壁自振荡的问题。在空泡行为响应方面,Sanabria等[35]引入了空泡形态的不确定性,并针对其不确定性建立了线性变参数模型,并用反馈线性化的方式进行控制。Vanek等[2,29]建立了如图4所示的水下超空泡航行体动力学模型,考虑了通气空泡的记忆效应,将时滞效应的影响引入闭环控制策略,仿真分析了系统稳定性对时滞效应的依赖性。此外,部分学者[36~38]基于Vanek时滞模型对水下超空泡航行体的实时控制展开了研究。在国内研究方面,魏英杰等[39]通过研究超空泡航行体垂直面内的稳定控制,提出了超空泡航行体尾舵效率的计算方法,并设计了非线性的闭环控制策略。范辉等[40]运用圆判据定理结合Nyquist曲线给出了超空泡航行体绝对稳定的充分条件,提出了能够削弱系统固有非线性特性的切换控制策略。然而,大多数研究成果都以理论分析和数值仿真作为主要研究手段,需进一步实验验证。

图4 水下超空泡航行体动力学模型[2,28]Fig.4 Dynamic Model for a Underwater Vehicle with Supercavity
3 跨介质航行体空泡流体动力闭环控制方法
上述水下超空泡航行体闭环控制的研究,大多都聚焦于水下航行体水平运动。对于跨介质航行体流态控制,主要的研究成果均为开环控制,闭环控制研究尚属空白。与水平运动相比,航行体跨介质垂向运动时,通气空泡形态和流体动力特性控制要求存在明显的差异。首先,运动和受力模式的不同使得超空泡航行体水平运动的控制策略无法直接应用于航行体垂向运动。其次,航行体垂向运动存在特有的出水段,复杂空泡多相流产生高量值瞬态载荷和运动姿态,必须以航行体响应作为控制目标,考虑空泡流态的时滞效应,实施闭环控制,系统更为复杂,对流态闭环控制特性的要求更高。再次,跨介质航行体历经深度的大范围变化,空泡的形态演化更为复杂,对控制策略适应性和可靠性提出了更高的挑战。
3.1 水下航行体多相流动闭环控制新构想
考虑到目前针对通气空泡形态的闭环控制研究处于空白,本文从建立一种通气空泡闭环控制研究方案入手,结合水动舵翼控制,发展一种水下航行体多相流动闭环控制的新构想。
在主动通气空泡闭环控制方面,提出了一种基于实验研究的控制方案(见图5),设置控制目标为空泡流态(如长度、泡内压力等),通过实时感知系统获得当前空泡形态信息,建立保证空泡稳定性、规避非预期流动结构的控制律,实时改变通气系统(执行系统)的状态,对跨介质航行体水下空泡流态实施闭环控制。
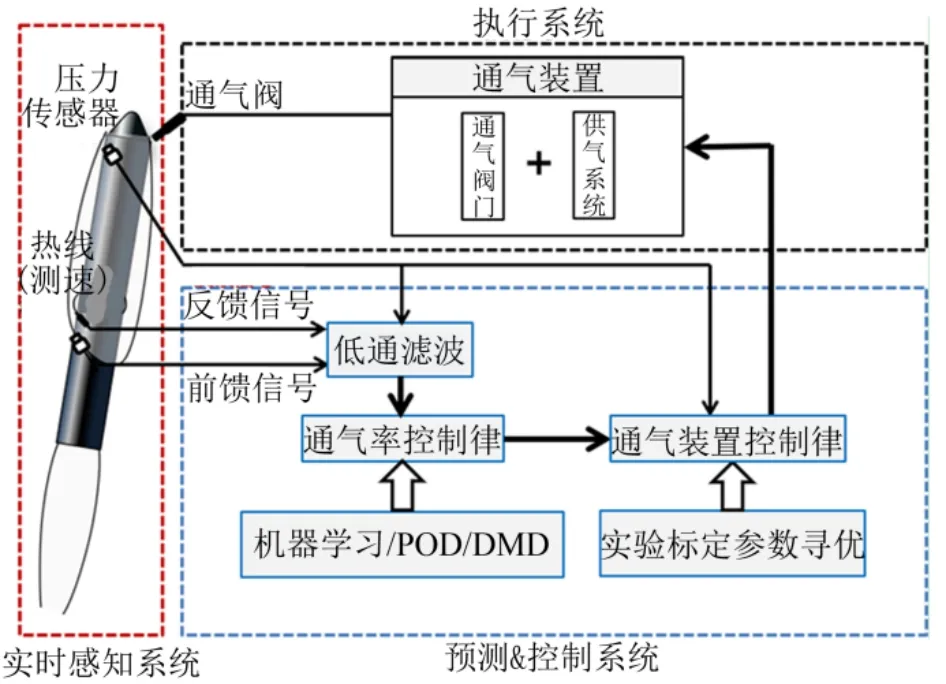
图5 基于实验研究的主动通气闭环控制方案示意Fig.5 Schematics of the Active Ventilation Closed-loop Control Method
基于上述研究,结合通气和舵翼流动控制手段,给出的一种以空泡多相流控制为主、水动舵翼控制为辅、与航行体响应耦合的闭环控制新构想,如图6所示。通过敏感器对空泡参数及运动参数进行实时感知及测量,作为控制器流体动力在线表征的输入,并由控制器解算获得空泡流态、载荷的当前值及其预示结果;同时以预示结果和预期状态的差异作为系统偏差,由控制器计及空泡流态时滞效应,生成控制律及其分配,即通气参数和舵偏指令,实现对通气参数和舵偏的协同控制;由执行机构(通气装置+尾舵)产生空泡调节动力和航行体刚体运动控制力。运用上述闭环控制方案,以期可在超常规恶劣环境条件下,获得预期空泡演化历程,从而实现以较低的载荷水平、较小的运动姿态安全跨介质出水。

图6 闭环控制方法系统Fig.6 System of the Closed-loop Control Method
3.2 航行体多相流动闭环控制的难点与关键技术
针对跨介质航行体流动闭环控制,存在的难点有:a)空泡流态实时准确感知问题。航行体水下运动过程中,空泡形态以及内部流动剧烈变化,气水掺混强烈,难以实时提取和准确辨识空泡特征参数;b)航行体流体动力建模和控制律设计问题。在超常规恶劣环境条件下,空泡演化的不确定性、流体动力的非定常非线性、载荷和姿态的强离散性,需要研究利用有限的测量信息,实现空泡流态准确表征和预示建模。同时,控制律的设计不仅依赖于当前测量信息,更依赖于流体动力、载荷和姿态的预示结果,这些都需要建立在对多要素作用下空泡流体动力规律的掌握。c)跨介质航行体动力学特性问题。采用主动通气、舵翼控制后,其控制力学机制和流体动力相互耦合,动力学模型更为复杂。
为了实现上述闭环控制构想,存在的关键技术有:a)空泡特征参数实时测量和辨识。融合航行体运动参数、介质参数及物面压力等多种传感器信息,结合空泡流体动力表征集合,建立传感器信息与空泡特征参数及空泡流态的对应关系。b)通气空泡流体动力建模与调控。需要掌握不同通气参数、外界环境、舵翼调控作用等多要素下空泡演化规律,揭示时变通气参数和舵翼耦合控制下空泡多相流体动力调控机制,建立通气空泡流体动力量化实时表征和预报模型,实现对空泡流态时滞特性的前馈控制。c)航行体非线性动力学系统控制。空泡流态闭环控制模型复杂,缺乏系统精确数学模型,需要研究智能控制和自适应控制等先进控制理论和方法,以获得预期的空泡流态和航行体运动特性。
4 结束语
本文在综合分析已有水下航行体流体动力调控技术的基础上,提出了以空泡多相流控制为主、水动舵翼控制为辅、与航行体响应耦合的闭环控制新构想,以期在超常规恶劣环境条件下,通过空泡流态和水动舵翼控制,实现航行体以较低的载荷水平、较小的运动姿态跨介质安全出水。分析阐述了该流动闭环控制构想面临的空泡特征参数实时测量和辨识、通气空泡流体动力建模和调控以及航行体非线性动力学系统控制等关键技术,为后续开展进一步研究提供了基本研究思路和技术路线。
猜你喜欢
现代仪器与医疗(2022年3期)2022-08-12
社会科学战线(2022年3期)2022-06-15
北京航空航天大学学报(2022年5期)2022-06-06
中国典型病例大全(2022年13期)2022-05-10
中国典型病例大全(2022年7期)2022-04-22
中国药学药品知识仓库(2022年5期)2022-04-11
山东工业技术(2017年1期)2017-01-24
现代电子技术(2016年22期)2016-12-26
电脑知识与技术(2016年18期)2016-11-02
大学教育(2016年7期)2016-07-27