
一种无人机目标打击半实物仿真实验方法
2021-12-13 10:58:12李媛媛马云飞刘晨赵鑫宇
无人机 2021年10期
李媛媛,马云飞,刘晨,赵鑫宇
本文提出一种方便快捷的半实物仿真方法,用于验证察打一体无人机的目标打击性能。该方法将无人机导引头引入半实物仿真网络,采用计算机模拟方法,生成目标区域的三维场景影像,实现目标打击的半实物仿真。本文对导引头视场区域的可视范围进行计算,设计一种半实物仿真实验方法,并完成半实物仿真实验,证明该方法的可行性。
随着无人机技术的快速发展,无人机的应用越来越广泛。察打一体无人机具备目标侦察、识别、锁定和打击功能,可同时执行侦察和打击任务,其作战运用越来越受军方的重视。
半实物仿真实验是验证无人机系统功能的重要手段。传统导弹打击目标的半实物实验基于五轴转台,内三轴转台模拟导弹运动,外两轴转台模拟目标运动。导弹、导弹惯性部件以及导引头放置于内三轴转台,专用目标模拟器放置于外两轴转台。半实物仿真实验须要专业仿真实验室及其配套基础设施,专业性强,实验效果好,但是基础设施建设须要较大的资金投入,不适合无人机目标打击实验。
本文提出一种基于三轴转台的实验方法,对配置可见光导引头的无人机开展目标打击仿真实验。在实验过程中,将无人机置于三轴转台上,用计算机模拟导引头的视场和目标,导引头通过高速串口采集计算机模拟的影像,飞控器导引无人机飞向目标,转台旋转模拟无人机运动,配合飞控器解算得到的舵量,完成无人机目标打击实验。
目标打击仿真实验的基本原理
相对运动原理
假设在某一时刻,打击目标位于T点,无人机位于M点。选取水平面为基准面,建立坐标系,X、Y轴组成水平面,Z轴垂直于水平面,如图1所示。
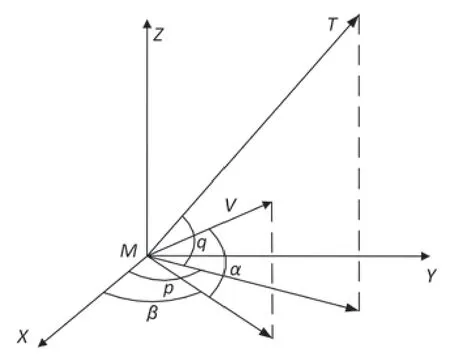
图1 相对运动坐标系。
其中,连线MT称为视线,q为视线与水平面的夹角,p为视线在水平面上的投影与X轴的夹角,V为无人机速度矢量,α为弹道倾角,β为弹道偏角。则比例导引律为:
无人机三维图形仿真技术
计算机图形绘制技术利用计算机图形技术模拟真实场景,可用于无人机仿真实验。本文研究的无人机目标打击仿真属于无人机仿真实验中的一种,使用计算机图形绘制技术描绘真实地形地貌以及无人机的飞行环境。该技术分为三维地理信息系统(GIS)场景、目标造型、取景变换和光栅化、可见性计算、可见点处的光亮度计算等模块。其中,目标造型、亮度计算、可见性计算等模块涉及计算机图形学技术,在计算机图形学等领域应用较广泛,技术基础成熟。而涉及三维地理信息系统和无人机飞行过程的联合场景仿真模拟,须要我们重点关注。
在计算机创建的三维场景中,物体的造型总是在某个坐标系中生成。我们称场景中物体造型所取的坐标系为场景坐标系,场景坐标系包括场景局部坐标系和场景世界坐标系。在造型和场景设计过程中,在物体上或物体附近建立一个局部坐标系,可给物体的表示和运动描述带来诸多方便和灵活性,而利用世界坐标系和局部坐标系之间的转换,可完成物体运动的模拟计算。
无人机飞行运动也涉及多个坐标系及其转换,主要有固连在地球上、相对大地不动的地面参考坐标系;和固连在无人机重心上、相对无人机不动的机体坐标系,将无人机运动状态量的解算分解到上述两个坐标系中,可满足绝大多数飞行状态的计算需求。
模拟无人机在计算机三维场景中的运动,可将计算机场景中的坐标系和无人机飞行动力学中的坐标系结合起来。把与地球相关的地面参考坐标系,作为场景的世界坐标系,其原点为场景中的原点;把无人机机体的坐标系,作为无人机模型的局部坐标系,其原点设于无人机的重心处。则无人机的实际三维运动和计算机场景的三维运动数据重合,以及将经纬度、高度等GIS数据解算到地面参考坐标系中,可在计算机三维场景中对无人机进行仿真模拟和计算。
相对目标计算
将运动学坐标系和三维场景坐标系固连,可得到无人机在三维场景中的位置。但本文须要的是从导引头视角看到的场景,依据上节所述的无人机三维仿真原理,添加导引头坐标系,以及导引头三维模型的局部坐标系,并计算导引头局部坐标系下包含虚拟目标的三维世界场景,即可得到基于导引头视角的场景。
导引头瞄准显示场景中的虚拟目标外观的三维模型,虚拟目标和场景随着无人机的相对运动而变换,虚拟目标和场景的位置、区域和尺度的相关仿真计算,决定导引头目标捕捉特性的真实性,决定视线角速率能否真正模拟弹目相对运动的变化。
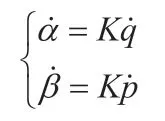
为简化计算,将虚拟目标设为质点,没有尺度和旋转特性,而真实目标的尺度和旋转特性作为场景的一部分,跟随场景的变换而变换。这样的话,虚拟三维场景在地面上的投影,可以简化为以目标点为中心,以导引头框架角视场范围为边界的一个椭圆形图形,进一步以一个外包矩形将椭圆形全部覆盖,则该矩形区域如图2所示。
在图2中,XYZ坐标系为参考坐标系,X、Y轴组成的平面为水平面,M点为无人机坐标点,T为目标,为视线,M' 为无人机在地面上的投影,MM ' 为无人机飞行高度,θ为视线与垂线MM'的夹角,Ω为导引头纵向框架角范围的半角,η为导引头横向框架角范围的半角,矩形ADCB为导引头视场投影范围,则w和h1、h2代表该矩形的宽和长,即为所要计算的值。其中,线段MM 、线段MT已知,∠θ、∠ Ω、∠η已知。
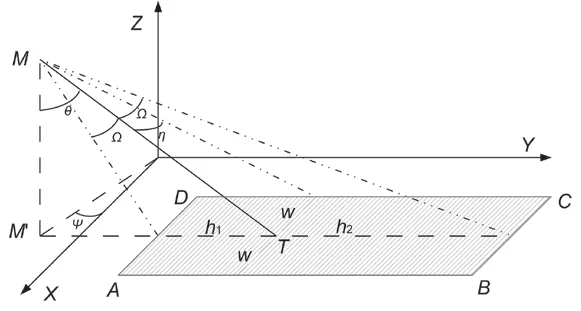
图2 导引头可视区域在大地的投影。
为方便计算,在导引头视点处建立导引头坐标系,如图3所示。
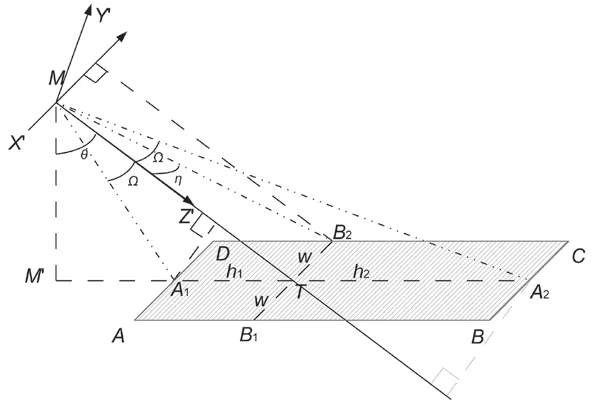
图3 导引头坐标系的可视区域。
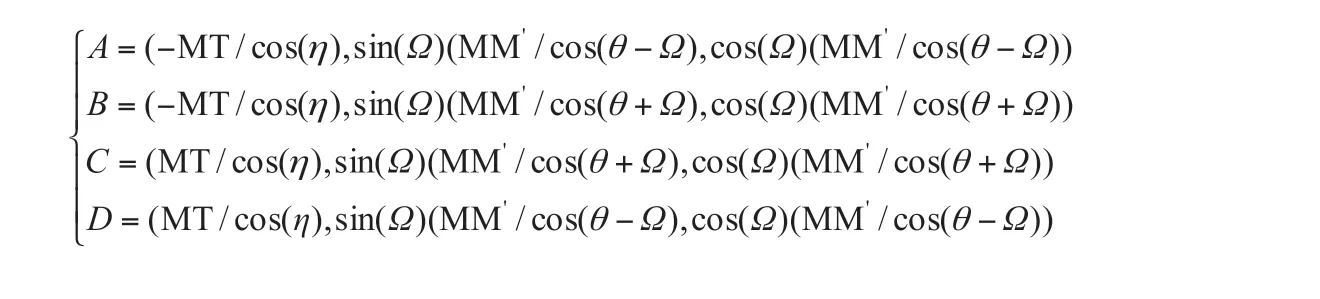
导引头坐标系X'Y'Z'依据参考坐标系建立,Z'轴沿视线方向,则目标点T的坐标为(0,0,MT),经简单三角函数计算可得,B2点的坐标为MT),A1点的坐标为A2点的坐标为于是可得A、B、C、D四点在导引头坐标系下的坐标为:
设导引头当前纵向框架角为EB,横向框架角为EH,则导引头坐标系到机体坐标系的方向余弦矩阵为:


以点A为例,点A在导引头坐标系的坐标矢量为在参考坐标系的坐标矢量为则有
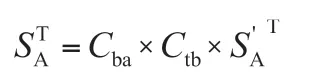
由于点A在导引头坐标系的坐标已知,即已知,则SA可求解。
同样,点B、C、D在参考系的坐标可求解。即矩形ADCB的各个坐标已知,可计算出导引头的视场。
半实物仿真实验
仿真实验设计
无人机目标打击半实物仿真实验方法是根据虚拟目标的经纬度,将目标放置在场景中。当无人机搜索目标区域时,若目标进入导引头视场,则在三维场景中可见目标,导引头即刻锁定目标,在场景中,目标位置在图像上的投影点,距离导引头视场中心的差距,即可形成导引头脱靶量,导引律开始工作,控制无人机飞向目标,目标位置和导引头视场中心逐渐重合,即无人机已经对准目标。
为验证所设计方法的正确性,本文设计半实物仿真实验,将导引头、场景仿真计算机接入仿真网络,仿真实验结构组成详见图4。
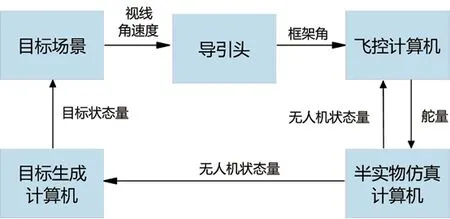
图4 半实物仿真实验结构图。
其中,目标生成计算机负责计算场景的位置、范围等信息,并通过网络将其输出到图形计算机,图形计算机根据这些信息生成目标区域的场景图像,导引头扫描生成的该场景图像并锁定目标,由此产生导引信息,经飞控计算机计算,产生控制舵量,驱动半实物仿真计算机模拟计算无人机的运动,而无人机的运动数据驱动目标生成计算机生成导引头视场范围,再经过图形计算机解算地理信息系统和目标造型等计算机图形信息,进而完成目标打击的半实物仿真实验。
半实物仿真实验

图6 导引头连接图。
设定无人机初始位置为X0(34.9431735,113.246956,300),如图5所示蓝色实点,无人机沿矩形航线飞行,航线点如图5所示红色实点,坐标为(34.9598752,113.24128,1000),(34.9403808,113.1978368,1000),(34.927536,113.2034944,1000),(34.9476192,113.246272,1000)。为方便导引头检索目标,目标如图5所示黑色三角点,位置设在航线延长线上,坐标为(34.9550005,113.2588795,85.62)。其中,目标的高度为当地海拔高度,确保目标位于地面之上。
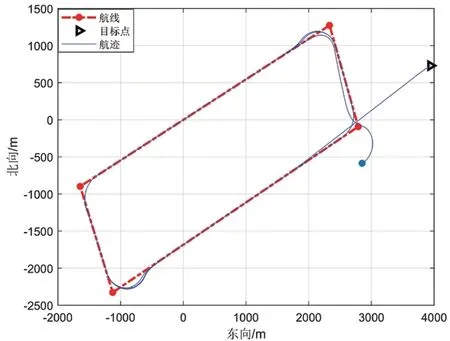
图5 无人机飞行航迹示意图。
仿真开始时刻,无人机由起始点向最近航点飞行,进入航线后沿航线爬升至1000m高度,搜索并锁定目标,直至命中目标。无人机飞行航迹如图5所示的蓝色实线。
将导引头接入半实物仿真网络,导引头连接目标场景计算机,接收图像,计算导引律,并将导引信息输出并传给飞控计算机。
在图7中,假设目标为小型雷达站,无人机搜索并发现目标,操控人员操作导引头锁定目标。导引头回传的图像详见图7。
图7 导引头锁定目标。
一旦锁定目标,导引头引导无人机攻击目标。期间,导引头光轴和无人机机体轴逐渐重合,导引头框架角逐渐归零,这时无人机已对准目标,如图8所示。无人机接近目标直至完成目标打击(见图9,图10)。至此,无人机目标打击半实物仿真实验全部完成。

图8 无人机对准目标。

图9 无人机抵近目标时导引头回传图像。

图10 无人机打击目标三维视景图。
结论
本文提出的半实物仿真实验方法,是将导引头接入半实物仿真网络,并未采用五轴转台实验方法。实验结果表明,该方法可方便快捷地实现目标打击仿真实验,以较低的成本实现了导引头及整个无人机系统功能的验证。
但是,在整个仿真流程中,导引头不采集真实图像,无法体现光照、反射等真实环境。下一步,相关技术人员将改进实验方案,进一步提升仿真实验的效果。
猜你喜欢
小学教学研究·理论版(2023年3期)2023-06-19 06:43:33
中国光学(2021年6期)2021-11-25 07:48:32
中国医疗设备(2019年1期)2019-01-15 12:10:54
好孩子画报(2016年8期)2016-12-12 02:25:48
教育界·下旬(2016年7期)2016-05-14 05:40:16
制导与引信(2016年3期)2016-03-20 16:01:58
火控雷达技术(2016年1期)2016-02-06 02:18:01
激光与红外(2015年10期)2015-03-23 06:07:18
弹箭与制导学报(2015年1期)2015-03-11 15:32:08
弹箭与制导学报(2015年1期)2015-03-11 15:32:06
