
基于ASRUKF的锂离子电池SOC估算
2021-12-10 05:31徐劲力郎锦峰刘佳俊
电源技术 2021年11期
徐劲力,郎锦峰,徐 维,刘佳俊
(武汉理工大学机电工程学院,湖北武汉 430070)
电池荷电状态(SOC)估算能够实时显示电池剩余电量的状况,是保障电池正常工作的基础[1]。
离线和在线辨识是等效电路模型参数辨识的主要方法,前者得到的模型参数无法反映电池实时的动态特性,后者通过实时采集可测变量,模型参数辨识结果更为准确。递推最小二乘法具有计算简单、容易实现等特点,是在线辨识中应用较多的方法之一[2-4],然而由于递推关系和数据量的增加,旧数据也一直影响着新输入数据的递推结果。
在电池SOC估算方面,初值准确与否对安时积分法估算SOC影响很大,容易造成误差累积[5];需要长时间的静置使得开路电压法在线估算变得不方便[6];内阻法则受电池种类和数量等的影响,在实际中应用很少[7]。后来智能算法也被用来进行SOC估算,通过对大量的测量数据进行训练和学习从而进行预测,典型的有支持向量机[8]、神经网络[9]等,这类算法不依赖数学模型,但对数据集的质量和完整度有较高的要求。目前基于模型的估算方法中卡尔曼滤波(KF)算法最为常见,无迹卡尔曼滤波(UKF)算法使用无损变换,且避免求解雅可比矩阵,减小了非线性误差[10],精度比扩展卡尔曼滤波(EKF)更高,但容易带来协方差矩阵非正定的情况。
为了解决最小二乘法在参数辨识过程中出现“数据饱和”的情况,以及无迹卡尔曼滤波易出现协方差矩阵非正定的情况,本文在Thevenin 模型的基础上,参数采用限定记忆最小二乘法辨识,电池SOC采用自适应平方根无迹卡尔曼滤波算法(ASRUKF)进行估算。
1 电池模型的建立
等效电路模型通过电路元件的组合来模拟电池特性,利用数学方法来建立不同参数之间的关系。图1 为一阶RC 电路模型,即Thevenin 等效电路模型,内部动态特性通过阻容网络来模拟。欧姆电阻用R0表示;开路电压为UOCV;用R1和C1分别表示极化电阻和电容;端电压为Ut;U1为RC 回路的极化电压;I为电流,充电时电流为正,放电时电流为负。

图1 一阶RC 电路模型
根据所建模型和电压定律,可建立如下电路方程:
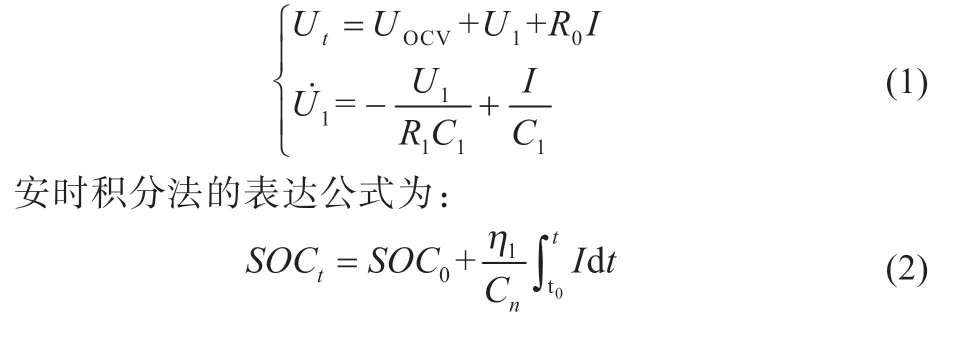
式中:SOC0为初始SOC值;η1为充放电效率,通常取1;容量用Cn表示;t0和t分别代表初始时刻和t时刻。
离散化处理之后,状态空间方程如下:
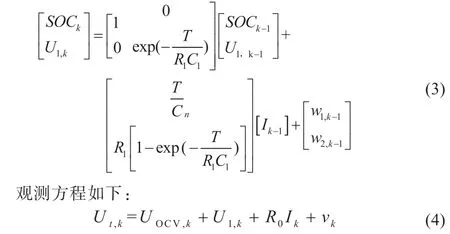
式中:T为采样时间;w为过程噪声;v为测量噪声,是用来模拟不确定性的高斯白噪声,状态变量为xk=[SOCk,U1,k],控制变量为uk=Ik,,观测变量为yk=Ut,k。
2 实验平台建立
本次实验采用如图2 所示的电池测试平台,主要包括测试系统、恒温箱、电池、数据采集设备等,三元锂电池具体参数为:温度为25 ℃,标称容量2.5 Ah,充电截止电压4.2 V,放电截止电压2.75 V。

图2 电池测试平台
通过对电池的充放电测试,得到电池开路电压的测试数据。为了能够更好地反映电池OCV和SOC的关系,本文通过九阶多项式来拟合OCV和SOC的关系曲线。由于迟滞效应,同一SOC值情况下,充电曲线和放电曲线之间存在电压差值,因此采用取平均值的方法来进行曲线拟合,曲线如图3 所示。
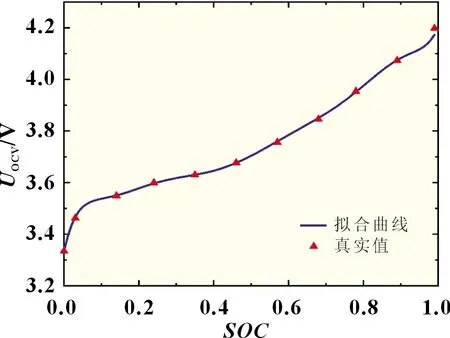
图3 OCV-SOC拟合曲线

拟合曲线的评价参数RMSE为0.002 128,表明该曲线有较好的拟合效果。
3 参数辨识
3.1 限定记忆最小二乘法
针对等效电路模型的参数辨识,最常用的是递推最小二乘法,但在递推算法的过程中,随着递推次数和数据量的增加,在增加新数据的同时,旧数据一直影响着新数据的递推结果。因此,针对上述存在的问题,提出了限定记忆最小二乘法来进行参数辨识。
这种方法在增加新数据的同时,剔除旧数据,依赖有限个最新数据来进行参数估计,记忆长度L始终保持不变,这样能够有效解决“数据饱和”带来的问题[11]。
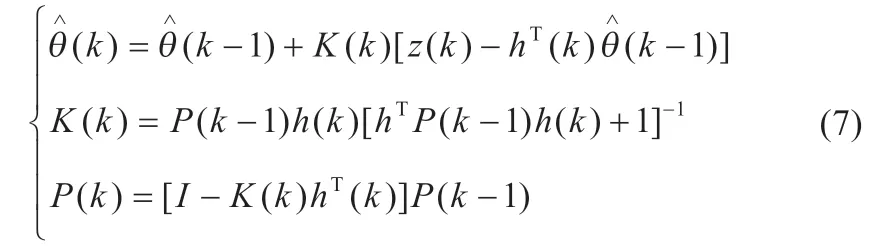
下面是限定记忆最小二乘法的递推原理:

式中:h(k)为数据向量;z(k)为输出量;θ 为参数向量。递推公式如下:
在递推初始时刻,需要对部分参数赋予初始值,通过递推更新来对参数进行预测,其基本思想可用图4 来表示。

图4 限定记忆最小二乘法递推示意图
假设当前时刻为k,则根据上一时刻的参数值协方差、参数估计值以及增益可以递推得到当前时刻的估算值,此时,需对记忆区间内的数据进行增删更新,从而计算得到k+1 时刻的参数值。
结合模型辨识的精度以及辨识所用时间,参数辨识所选取的记忆长度为200。
3.2 电池模型参数辨识
根据所建立的等效电路模型可得到如下所示的函数:

将z(k+1)=hT(k)θ(k+1)+ν(k)以及h(k)和θ(k)代入限定记忆最小二乘法中进行参数辨识,进而可以求得电池模型对应参数的值。
3.3 辨识模型的验证
为了验证模型参数辨识的准确性,将辨识的模型参数带入端电压的求解公式中,可以得到端电压的仿真值,将仿真值与实测值进行对比。通过上述实验平台模拟城市道路循环工况(UDDS),得到电压和电流数据。将模型的参数辨识结果代入,模型的端电压仿真值和实测值结果如图5 所示。图6为模型端电压的误差。

图5 端电压仿真值与实测值

图6 模型端电压误差
从图中可以看到,所建立模型参数辨识的整体精度较好,采用限定记忆最小二乘法LMRLS 辨识的模型端电压仿真值和实测值的误差大部分保持在0.02 V 以内,在15 300 s 左右,电池SOC降至10%,此时,模型的非线性增大导致端电压误差开始增大,最大为0.07 V;而最小二乘法RLS 辨识的模型端电压仿真值和实测值误差保持在0.04 V 以内,最大误差达到0.08 V,前者的模型端电压的均方根误差RMSE为0.014 5,后者为0.0176,因此LMRLS 比RLS有更高的参数辨识精度。
4 SOC 估算
4.1 算法的建立
无迹卡尔曼滤波(UKF)采用无损变换,其原理是利用概率密度分布近似的方法来处理非线性函数,其精度可达泰勒展开式的第三阶。针对在误差协方差迭代过程中易出现矩阵非正定问题,本文将协方差用协方差阵的平方根进行迭代,并结合自适应滤波器来进行SOC的估算。
平方根通过QR 分解和Cholesky 一阶更新来获得[12],自适应滤波器对迭代过程中的噪声更新,避免噪声不准确对估算结果的影响。
ASRUKF 的估算过程如下[13]:
(1)状态函数初始化:

(2)构建Sigma 点:

(3)时间更新,对构建的Sigma 点进行状态方程的处理,预测系统状态量和误差方差矩阵:
(4)对Sigma 点进行重采样:

式中:dk=(1-b)/(1-bk+1),遗忘因子b介于0 到1 之间,这里取0.95。
对方差矩阵和误差协方差进行更新:
(5)计算增益矩阵,并对估计量和方差进行更新:

根据限定记忆最小二乘法辨识的结果,代入公式(3)和(4),可完成SOC的估算。
4.2 估算结果的分析
为了验证上述算法的准确性,将UDDS 工况的电流作为输入,初始SOC值均设置为0.7。图7 为UKF 和ASRUKF 估计结果与参考值的对比图。图8 为两种算法的估算结果与参考值的误差曲线。

图7 UDDS工况下的SOC估算结果

图8 UDDS 工况下的估算误差曲线
从图7 和图8 可以看出,UKF 和ASRUKF 两种算法都能够比较快速地收敛到真实值附近,但是ASRUKF 相比UKF 有更好的估算结果。UKF 算法估算误差大部分都在2%以下,最大误差为4%,出现在SOC低于10%的时候,这是由于放电末段非线性增强导致;在SOC大于10%的时候,ASRUKF 的估算误差均小于1%,在SOC小于10%的时候误差增大,但是最大误差也小于2%,不同算法的估计误差如表1 所示。

表1 不同算法的估计误差 %
与UKF 算法相比,ASRUKF 算法确保估算结果收敛,避免因干扰和计算误差而导致协方差矩阵非正定,也减少了计算量,同时加入自适应算法使得状态估计过程中能够实时进行噪声更新,提升了估算结果的准确性。
5 结论
在Thevenin 等效电路模型的基础上,针对最小二乘法在参数辨识过程中存在“数据饱和”的问题,模型参数采用限定记忆最小二乘法进行辨识,利用固定记忆长度的数据来减小旧数据累积对结果的影响,并通过工况端电压来验证模型辨识结果的准确性。采用自适应平方根无迹卡尔曼滤波来进行SOC估算,并与UKF 结果的对比分析,证明该方法有更高的估计精度。
猜你喜欢
小学生学习指导(低年级)(2022年10期)2022-11-05
数学小灵通(1-2年级)(2021年10期)2021-11-05
语数外学习·初中版(2020年11期)2020-09-10
小学生学习指导(低年级)(2019年9期)2019-09-25
水电站机电技术(2017年9期)2017-09-26
华东师范大学学报(自然科学版)(2017年1期)2017-02-27
电源技术(2016年12期)2017-01-10
微特电机(2016年3期)2016-11-29
考试周刊(2016年54期)2016-07-18
自动化学报(2016年8期)2016-04-16
