
数据驱动的雷达目标近场交会回波建模方法
2021-12-10 08:50:44李永晨王晓冰魏飞鸣
制导与引信 2021年3期
李永晨, 廖 意, 王晓冰, 魏飞鸣,2
(1.电磁散射重点实验室,上海 200438;2.上海交通大学电子信息与电气工程学院,上海 200240)
0 引言
雷达与目标近场交会的回波特性广泛应用于近程雷达设计分析、仿真验证、测试评估等环节。例如,雷达散射截面(radar cross section,RCS)是导弹无线电引信启动特性分析、车载毫米波雷达车辆及行人探测识别性能评估的重要参考。由于近场交会状态空间巨大,且目标近场散射还存在与雷达天线方向图、观测距离相关的特点,使得不同交会状态下的目标近场回波变化显著,难以获取完备的目标近场回波数据[1]。
国内外对目标近场交会回波特性的研究主要通过模拟测试和仿真建模来实现。上世纪80年代,美国海军航空电子战中心建立了室内目标与导弹交会实物模拟平台,用于引信与目标动态交会过程的目标回波信号测量。到90年代,国外发展了物理光学、弹跳射线法等高频近似算法的目标近场电磁散射仿真建模方法[2-3]。上世纪90年代,国内建立了大型目标近场动态交会模拟试验系统,用于测量目标近场RCS、动态多普勒回波等特性[4],并通过迭代物理光学、等效边缘电磁流等高频算法实现了对目标近场RCS、近场交会动态回波的仿真建模[5-6]。由于目标近场回波特性随雷达体制和观测距离变化而变化,当雷达参数和观测状态变化时,目标近场回波需重复测试或仿真,难以发挥已有数据共用共享的价值。
针对数据的共用共享问题,为挖掘数据中存在的共用性和一般性规律,数据驱动的建模方法被提出。数据驱动的建模方法是伴随着大数据的应用而发展起来的。2007年图灵奖得主Jim Gray提出将“数据密集型”科学发现作为科学研究的第四类范式,将科学研究的范式扩展为经验科学、理论科学、计算科学和数据科学。随着雷达与目标近场回波数据的不断积累,以大量的试验测量数据和仿真计算数据为基础的目标近场回波分析与建模方法,将成为获取雷达参数、观测距离变化时目标近场特性的新途径。
本文基于目标近场交会回波的变化特点,提出基于支持向量机(support vector machine,SVM)的近场回波分析与建模方法,并对仿真点目标的近场动态回波数据进行支持向量回归(support vector regression,SVR)学习,验证目标峰值特征回归模型的近场回波预测精度,给出数据驱动近场回波建模的结论。
1 数据驱动的目标近场回波建模方法
数据驱动的建模广泛采用机器学习的方法对数据进行训练,建立符合数据变化规律和趋势的模型。针对数据建模的机器学习方法非常多,其中,统计学习领域的SVM方法及核方法在模型回归预测方面表现出较强的适用性。本文采用SVM方法对目标近场回波数据进行训练学习,建立目标回波峰值特征的SVR模型。
1.1 目标近场交会回波峰值特征
弹目近场交会回波特性与雷达参数、观测距离密切相关,且反映了随距离变化的目标近场动态RCS特性。以弹目交会时引信动态多普勒回波为例,基于弹目交会模型分析目标近场回波特征,如图1所示。在导弹与目标交会过程中,目标位于近场区域,引信天线窄波束在目标表面形成非均匀局部照射,目标照射区域的范围与弹体姿态、天线方向图、目标姿态、观测距离等因素相关。弹目交会模型如图1(a)所示。在弹目相对运动坐标系(oxyz坐标系)下,导弹沿x轴正方向以速度v运动,天线波束依次扫过目标表面。P表示导弹在脱靶平面内的脱靶点,ρ表示脱靶量,ψ表示脱靶方位,yP和zP分别表示脱靶点坐标。由此得到沿x轴变化的目标近场多普勒回波与近场RCS变化曲线,分别如图1(b)和图1(c)所示。
图1 弹目交会近场回波特征
通过对弹目交会目标回波近场RCS变化曲线进行现象学分析,可以看出近场RCS表现出多峰值特征。从目标电磁散射机理上分析,相对于雷达入射波长,目标表现为电大尺寸,高频散射构成了目标的主要散射贡献,使得目标表面边缘、顶点、几何不连续处等位置形成局部的散射源或散射中心[7]。在弹目交会场景中,可将目标散射等效近似为多个近场散射源的组合。随着弹目交会运动,天线波束依次扫过目标散射源,散射源变化引起了目标近场RCS多峰值变化,由此可以通过目标等效散射源建立目标近场RCS峰值特征模型。
采用线性系统理论的方法,建立目标等效散射源近似的近场RCS峰值模型。目标散射源的数学模型p(r)可以表示为

式中:r为弹目交会位置;N为散射源数量;ai与ri分别为散射源i的幅度以及位于弹目交会距离轴的位置;δ(·)为冲激函数。
目标所有散射源形成的近场RCS峰值包络响应s(r)可表示为散射源模型与雷达系统响应函数的卷积形式
式中:h(r)为雷达系统响应函数;*为卷积运算符。
在一种弹目交会状态下,天线波束依次照射到目标上的N个散射源,基于等效散射源的目标近场RCS系统模型如图2所示。
图2 基于等效散射源的目标近场RCS系统模型
根据目标近场RCS峰值模型,近场RCS曲线包含的散射源参数为散射幅度ai、位置ri以及散射源个数N,如图2(a)所示。该弹目交会状态下目标散射源的近场回波和峰值包络曲线分别如图2(b)和图2(c)所示。
1.2 支持向量回归模型
基于大批量弹目交会状态下的目标近场动态RCS数据,采用SVM方法分别建立目标散射源幅度、位置和个数的回归模型。
在雷达入射波长和天线方向图参数不变的前提下,改变弹体姿态(俯仰角αm、方位角βm、滚转角γm)、目标姿态(俯仰角αt、方位角βt、滚转角γt),以及弹目相对运动坐标系下脱靶量ρ与脱靶方位ψ,雷达天线波束照射范围内目标散射源变化,引起目标近场RCS变化。因此,可以将弹体姿态、目标姿态、脱靶量和脱靶方位作为弹目交会近场RCS建模的特征向量。
令x=[αm,βm,γm,αt,βt,γt,ρ,ψ]为特征向量,则目标散射源参数的数学模型可表示为

式中:y表示散射源参数回归值,在SVR模型中分别用于表示散射源个数、幅度或位置参数;w表示特征空间法向量;T为转置运算符;ϕ(x)表示将x映射后的特征向量;b表示模型偏移量。
式中:‖·‖2表示向量范数运算;C为加权值;变量ν∈(0,1]用于控制支持向量个数。
令y=[y1,y2,…,yM]T,采用拉格朗日乘子法,可得式(4)的对偶问题表达式为



式(3)中偏移量b可通过训练样本(xi,yi)计算。对所有满足条件0<μi<C/M的样本求解偏移量估计值

将式(6)和式(7)带入式(3),可得散射源参数回归模型

1.3 实现流程与评估
采用SVR建立弹目交会状态下目标散射源参数模型的实现流程如图3所示。
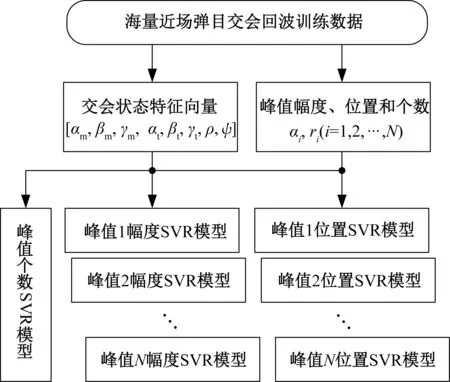
图3 散射源峰值参数回归模型实现流程
首先,对近场弹目交会回波训练数据分别建立交会状态特征向量,以及峰值幅度、位置、个数的回归值;其次,将弹目交会状态下近场RCS峰值个数作为该状态下散射源个数的回归值,通过弹目交会近场RCS峰值个数训练数据建立目标散射个数的SVR模型;最后,将训练数据中每一条弹目交会状态下的近场RCS峰值从大到小进行排序,统计所有训练数据中第1个峰值至第N个峰值的幅度与位置,依次从大到小分别采用SVR对散射源幅度与位置进行建模。因此,假设一条弹目交会状态下目标包含N个散射源,则需要进行2N+1次SVR训练,建立包含N个散射源的SVR模型。

式中:L表示测试数据样本个数。
2 仿真结果
设置5个点目标,散射幅度分别为0.6,1.0,0.7,1.0,0.8 V,坐标位置分别为(2.0,0,0),(1.0,0.5,0.5),(0,0,-1.0),(1.0,-0.5,0.5),(-2.0,-0.5,-0.5),如图4所示。圆点大小表示散射幅度强弱。
图4 点目标位置
设雷达入射频率为16 GHz,弹目交会速度为1 000 m/s,导弹姿态角αm,βm,γm∈ [-5°,5°],目标姿态角αt,βt,γt∈ [-5°,5°],脱靶量ρ∈[2 m,5 m],脱靶方位ψ∈[0°,10°]。仿真10 000条弹目交会回波多普勒数据,将9 500条回波数据作为训练数据,其余500条数据作为测试数据。

表1 ν-SVR模型参数取值
根据训练得到的回波峰值个数SVR模型,用测试数据进行峰值个数预测,得到500条测试数据峰值个数预测的估计中值为5,与点目标真实个数相同。
根据训练得到的回波峰值幅度与位置SVR模型,对500条测试数据的回波峰值幅度与位置进行预测,并根据SCC评估模型参数建模精度,结果如表2所示。可以看出,峰值幅度SVR模型预测结果的SCC优于0.92,峰值位置SVR模型预测结果的SCC优于0.90,表明SVR模型可以很好地实现交会回波峰值幅度与位置的预测建模。
表2 交会回波峰值参数SVR模型预测平方相关系数
将SVR峰值参数和交会回波预测结果分别与测试数据中任意选取的一条交会回波数据进行比较,如图5所示。图5(a)中SVR峰值参数预测结果与测试回波数据的峰值非常接近;图5(b)中基于SVR的弹目交会回波预测结果与测试交会回波数据基本一致,其中,测试交会回波中加入了高斯白噪声,峰值信噪比为20 d B。
图5 近场交会回波峰值参数预测比较
3 结论
基于目标近场交会回波的多峰值特征,本文提出了数据驱动的目标近场回波预测建模方法。将弹目交会状态变量(弹体姿态、目标姿态、脱靶量和脱靶方位)作为特征向量,建立了交会回波峰值幅度、位置和个数的支持向量回归模型,核函数选择为高斯核。点目标弹目交会回波预测建模试验结果表明,峰值个数回归模型的预测中值与真实回波峰值个数相同,峰值幅度与位置预测的平方相关系数都达到0.9以上。为了得到精度更高、支持预测状态范围更广的目标交会回波峰值参数支持向量回归模型,需要进一步增加训练数据数量规模和弹目交会状态空间的覆盖范围。
猜你喜欢
舰船电子工程(2023年8期)2023-11-15 06:51:08
纺织科学研究(2023年9期)2023-10-23 11:18:06
成都信息工程大学学报(2021年6期)2021-02-12 03:00:48
探索科学(学术版)(2019年5期)2019-07-13 03:08:23
当代水产(2019年1期)2019-05-16 02:41:10
中国测试(2018年10期)2018-11-17 01:58:50
兵器装备工程学报(2017年4期)2017-04-28 01:12:28
太空探索(2016年9期)2016-07-12 09:59:53
制导与引信(2016年3期)2016-03-20 16:02:01
制导与引信(2015年3期)2015-04-20 00:44:22
