谐振式光学陀螺用激光器双电流源混合驱动方法
2021-12-06 03:14:12王琪伟王泽宇周晓娜徐万扬
中国惯性技术学报 2021年4期
王琪伟,王泽宇,杨 博,周晓娜,徐万扬
(1.北京控制工程研究所,北京 100190;2.空间智能控制技术重点实验室,北京 100190)
谐振式光学陀螺利用环形谐振腔实现了多光束干涉,以增强旋转引起的光学Sagnac效应[1,2],这使得谐振式光学陀螺只需要很短的谐振腔长度就可以达到与干涉式光学陀螺相当的理论检测精度[3-5],为光学陀螺的小型化提供了潜在的有利条件。谐振式光学陀螺是通过检测谐振腔中传输方向相反的两束光的谐振频差来计算得到系统的旋转角速度,这给光源的输出提出了相对苛刻的要求:既需要满足窄线宽、低频率噪声等条件[6],同时也应有足够的调谐范围和调谐带宽,用来保证锁频控制环路的精度。
为了适应小型化的要求,谐振式光学陀螺需要采用体积小的半导体激光器作为光源[7],随之带来的就是对于低噪声、高带宽半导体激光器驱动控制技术的迫切需要,从而满足谐振式光学陀螺对半导体激光器窄线宽、低频率噪声和高调谐速率的需要。
基于上述要求,本文提出了基于双电流源的混合驱动设计方案,采用一个环路带宽被大幅度压缩的大电流恒定电流源和一个环路带宽满足调谐要求的小电流压控电流源并联的混合驱动方式,在对激光器进行高速稳定调谐的同时,保证其具有理想的频率噪声和线宽性能,期望解决驱动电流和调谐电流采用同一电流源提供时导致的控制精度损失问题,及由高调谐速率所导致的频率噪声和线宽劣化等问题。
1 噪声模型
常用于半导体激光器电流驱动的压控电流源结构如图1所示,其中N沟道功率金属-氧化物半导体场效应晶体管(MOSFET)处于导通状态,并且与运算放大器构成具有高电流输出的射随电路。根据运放的虚短虚断条件,压控电流源的输出电流可以表示为:
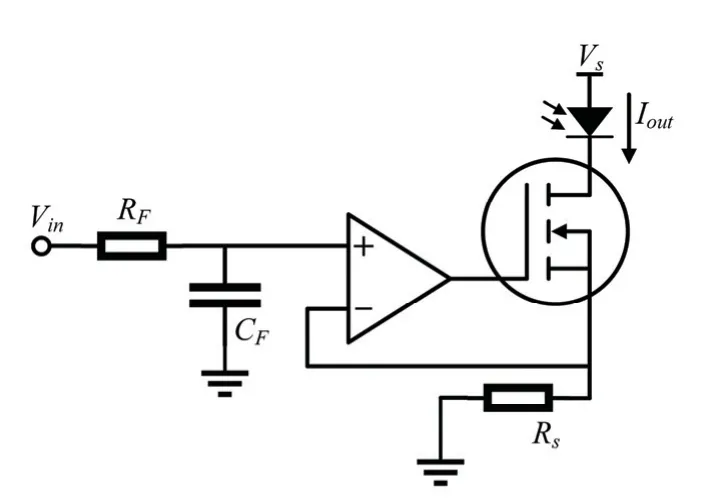
图1 基于MOSFET的压控电流源Fig.1 Voltage-controlled current source based on MOSFET

式中,Rs为压控电流源的控制电阻,与转移电导gm的关系可以表示为:

图2给出了压控电流源的噪声模型,可能对输出电流产生影响的主要噪声源包括输入电压噪声Vn、滤波电阻的电阻热噪声VRF、运算放大器电压噪声VA以及控制电阻的电阻热噪声VRs等等。其中,Vn和VRF会经过由RF和CF组成的低通滤波器后作用于激光器,而剩余的其他噪声则会直接作用于激光器,各个噪声源相互独立。因此,基本电流源在单位带宽下的电流噪声可以表示为:
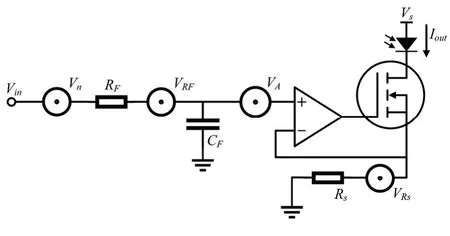
图2 压控电流源噪声模型Fig.2 The noise model of voltage-controlled current source

式中,VRF和VRs为电阻热噪声,可以表示为:

式中,Kb为玻尔兹曼常数,T为热力学温度,R为电阻阻值。可依据上述噪声模型对驱动设计方案的输出噪声进行分析。
2 混合驱动方案
谐振式光学陀螺用窄线宽半导体激光器需要在恒流源的驱动下工作,同时锁频控制环路的调谐电流也会动态变化。窄线宽半导体激光器正常工作所需要的恒定驱动电流约为150 mA,锁频控制所需的调谐电流约为10 mA。可以看到,激光器正常工作所需的恒定驱动电流与需要实时高速变化的调谐电流相差了一个量级。
在传统的半导体激光器驱动方案中[8,9],通常会采用一个电流源提供恒定电流及调谐电流,如图3所示。此时,除了频率的控制精度不可避免地变差以外,由调谐速率所决定的高通带频率也会导致电流源噪声的增加,从而会使窄线宽激光器的频率噪声和线宽指标劣化,进而影响陀螺的精度。
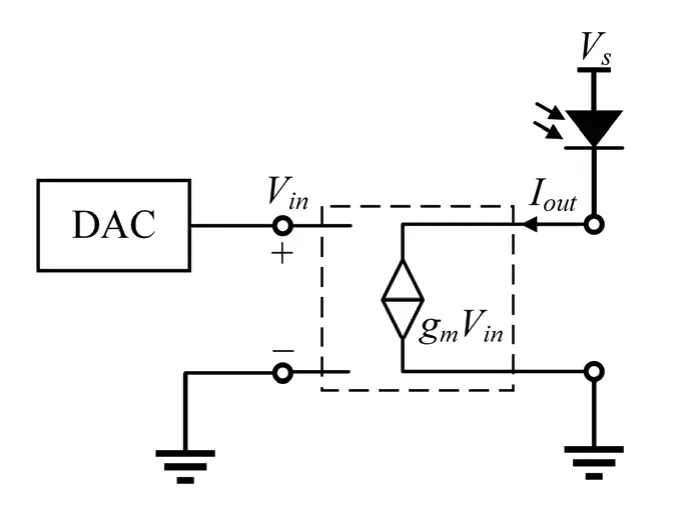
图3 传统的半导体激光器驱动方案Fig.3 Traditional semi-conductor laser driver
基于此提出了如图4所示的双电流源混合驱动的设计方案。整个方案由一个恒定电流源和一个压控电流源组成,其中大电流恒定电流源的环路带宽被大幅压缩至100 Hz以下,从而表现出较好的噪声特性;而小电流压控电流源的环路带宽不低于1 MHz,从而能够满足调谐速率的要求。通过两个电流源并联的方式实现了输出噪声和动态性能的兼顾。
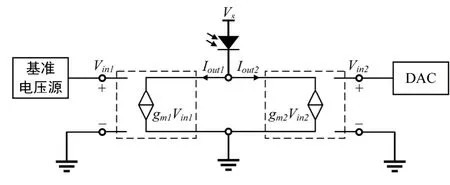
图4 半导体激光器双电流源混合驱动方案Fig.4 Hybrid dual current source semi-conductor laser driver
下面根据第1节介绍的噪声模型分别对传统的半导体激光器驱动方案和改进的双电流源混合驱动方案的输出噪声进行分析。
对于如图3所示的传统的半导体激光器驱动方案,当采用2 V基准电压源时,为了满足总输出电流160 mA的要求,压控电流源的转移电导gm为0.08 S,控制电阻Rs为12.5 Ω。通常,滤波电阻RF典型值约为1 kΩ,由此可以计算得到这两个电阻的热噪声,分别为0.45 nV/Hz1/2和4.1 nV/Hz1/2。数模转换器DAC的量化噪声则是主要的输入电压噪声,可以表示为:

其中,根据谐振式光学陀螺对于半导体激光器的实际需求,将电流调谐带宽Bi取为1 MHz。同时,为了满足调谐带宽需求,滤波器带宽需要与电流调谐带宽相等,此时输出电流噪声可表示为:

考虑实际情况,当采用16位DAC作为基准电压源时,此时DAC的量化噪声约为8.8 nV/Hz1/2。此外,低噪声运算放大器的电压噪声约为1 nV/Hz1/2。,计算可知传统的半导体激光器驱动方案的输出电流噪声约为0.78 μA。
对于图4所示的双电流源驱动方案,可以分为恒定电流源和压控电流源两部分。首先分析恒定电流源部分,该部分输出电流噪声可以表示为:
同样采用2 V基准电压源时,为了产生150 mA的恒定偏置电流,转移电导gm为0.075 S,控制电阻Rs为13.3 Ω。与单电源方案不同,恒定电流源不需要考虑调谐带宽的要求,因此可以通过压缩带宽大幅降低输入电压噪声和滤波电阻热噪声的影响,通过将恒定电流源带宽压缩至100 Hz,根据式(7)可以计算得到其输出电流噪声约为0.83 nA。
类似地,压控电流源的输出电流噪声可表示为:

与单电流驱动方案一致,采用16位DAC,为了实现10 mA的电流调谐范围,转移电导gm为0.005 S,控制电阻Rs为200 Ω,根据式(8)计算可知其输出电流噪声为49.6 nA。
由于两个电流源互不相关,因此双电流源混合驱动电路的总输出电流噪声可表示为:

可以看到,采用双电流源混合驱动方案后,总输出电流噪声明显降低。根据谐振腔的自由谱线宽度和扫频电流范围,可以得到谐振式光学陀螺所采用的窄线宽半导体激光器的调谐系数约为0.05 Hz/pA,即由驱动电流源所引起的激光器频率噪声约为25 Hz/Hz1/2,略小于激光器本身的频率噪声。从理论上验证了所提出的基于双电流源的混合驱动方案可以满足谐振式光学陀螺的应用需求。
3 实验验证
根据上述设计搭建了基于双电流源混合驱动的谐振式光学陀螺用可调谐窄线宽激光器驱动电路板,电路板实物如图5所示。

图5 可调谐窄线宽半导体激光器驱动电路板Fig.5 The circuit board of tunable narrow linewidth semi-conductor laser driver
为了比较两种驱动方案的性能,分别对传统单电流源驱动和双电流源混合驱动的激光器频率噪声进行测试,测试结果如图6所示,可以看到两种驱动方案在低频段的频率噪声基本一致,但是在高频段,双电流源混合驱动方案的频率噪声远低于单电流源驱动方案,验证了双电流源混合驱动方案有利于提高可调谐半导体激光器输出光的性能。
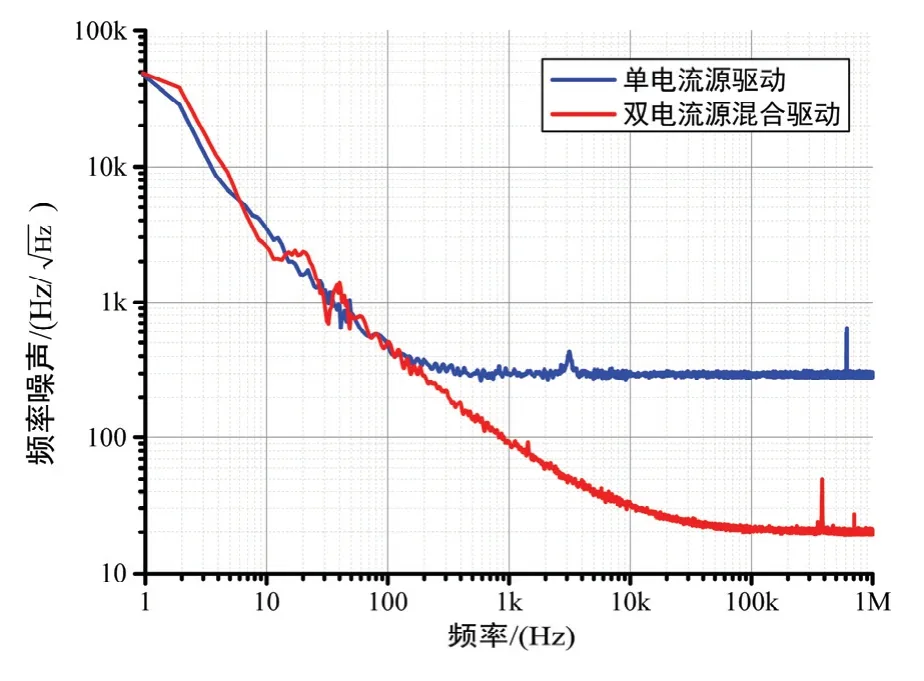
图6 半导体激光器频率噪声测试结果Fig.6 Frequency noise test results of semi-conductor laser
图7给出了采用双电流源混合驱动方案的半导体激光器的相对强度噪声测试结果。可以看出,激光器的相对强度噪声约为-150 dBc/Hz。当信号光电流为1 mA时,光电流强度噪声为31 pA/Hz1/2,完全满足谐振式光学陀螺的应用需要。
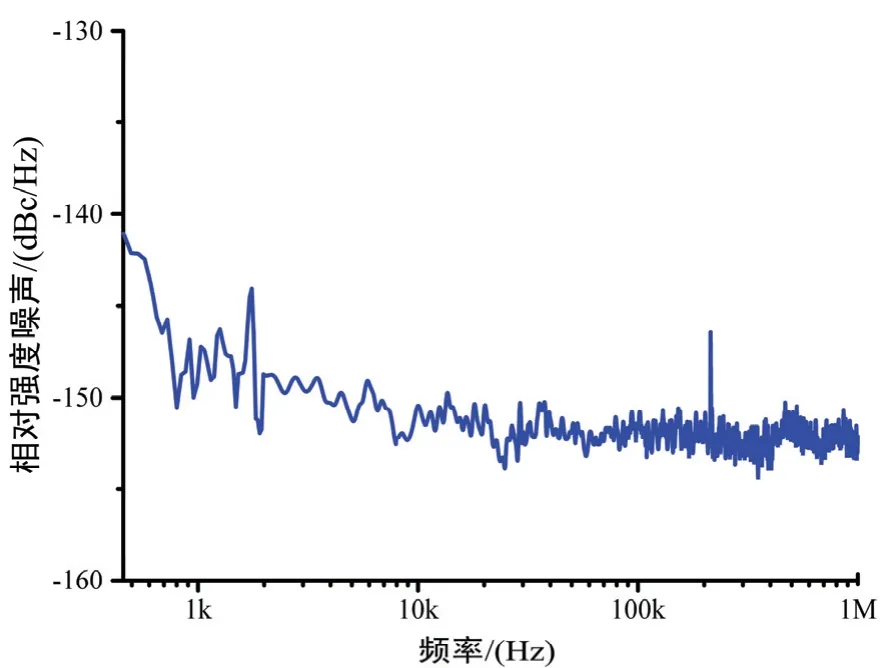
图7 双电流源混合驱动半导体激光器的相对强度噪声Fig.7 Relative intensity noise of semi-conductor laser driven by hybrid dual current source
由于谐振式光学陀螺工作过程中需要对窄线宽激光器进行连续调谐,需要对不同调谐控制信号下的激光器线宽进行测试[10],测试结果如图8所示。图中虚线为不施加调谐信号时的激光器线宽,而实线为施加不同调谐信号时的激光器线宽,调谐信号大小由控制DAC输出的数字信号表示。不难看出,与不施加调谐信号时相比,整个调谐范围内激光器的输出线宽变化不大,波动范围约为±400 Hz,并且线宽的测试结果与所使用的半导体激光器标称值一致,远远小于波导谐振腔的半高全宽,能够满足系统的性能要求。
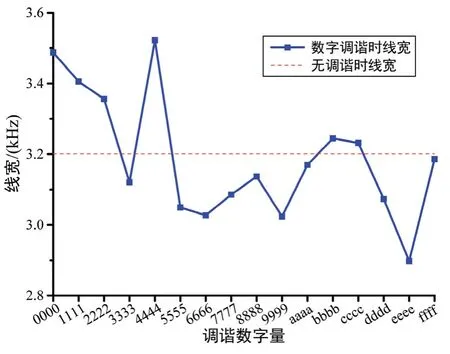
图8 双电流源混合驱动半导体激光器的线宽Fig.8 Laser linewidth of semi-conductor laser driven by hybrid dual current source
在完成半导体激光器关键性能测试的基础上,测试了双电流源混合驱动激光器在谐振式光学陀螺中的性能。实验用谐振式光学陀螺以直径60 mm的波导谐振腔作为敏感环,将锁频状态下共模输出端的相关检测结果经陀螺信号输出端进行输出,获得系统的锁频误差。在此基础上,利用系统开环标度因数将锁频误差转化为等效的角速度误差输出。图9给出了谐振式光学陀螺锁频误差1小时的测试结果,可以看到陀螺锁频误差没有明显的漂移,10 s平滑条件下的锁频精度达到3.72 °/h(约为0.48 Hz),完全能够满足谐振式光学陀螺的检测需求。
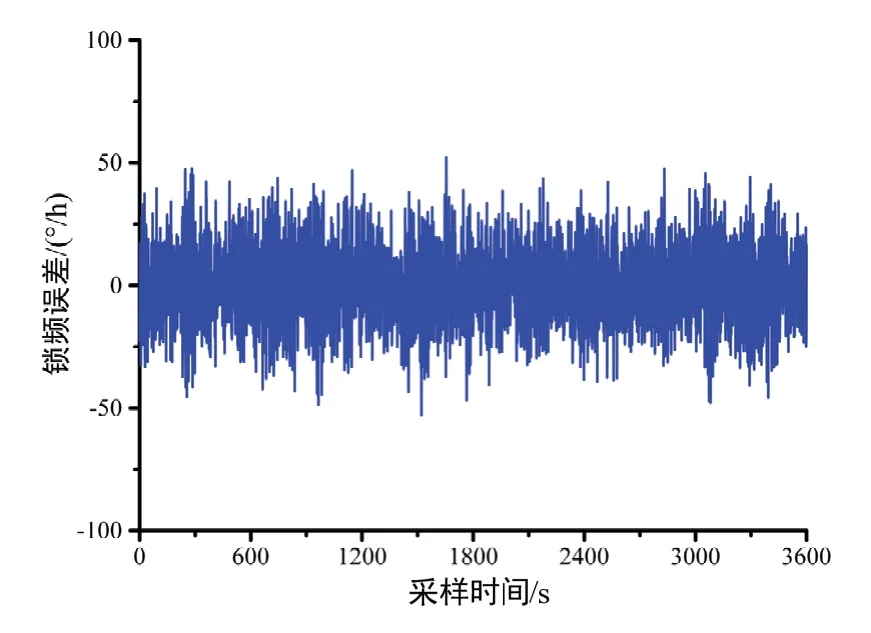
图9 谐振式光学陀螺锁频误差测试Fig.9 The frequency locking error of resonator optic gyro
4 结 论
针对谐振式光学陀螺对低噪声、高带宽窄线宽激光器驱动的要求,本文提出了基于双电流源混合驱动的设计方案,并对其频率噪声、相对强度噪声和线宽进行了实验测试,激光器输出频率噪声优于25 Hz/Hz1/2@10 kHz,在整个调谐范围内线宽小于3.6 kHz,谐振式光学陀螺的锁频精度达到3.72 °/h(约为0.48 Hz)。测试结果表明采用该驱动控制技术的激光器性能全面满足陀螺应用需求,为谐振式光学陀螺的工程应用奠定了基础。
猜你喜欢
军事文摘(2024年4期)2024-03-19 09:40:02
印制电路信息(2022年6期)2022-08-03 05:33:18
科技与创新(2022年11期)2022-06-13 07:54:42
科学(2020年6期)2020-02-06 09:00:06
小学生学习指导(低年级)(2019年10期)2019-10-16 08:12:34
学生天地(2019年6期)2019-03-07 01:10:46
世界地质(2019年2期)2019-02-18 07:10:08
军事文摘(2018年24期)2018-12-26 00:58:18
快乐语文(2018年36期)2018-03-12 00:56:02
光学精密工程(2016年5期)2016-11-07 09:06:14