基于同频调制解调的谐振式光纤陀螺仪
2021-12-06 03:14:08钱伟文李汉钊马慧莲金仲和
中国惯性技术学报 2021年4期
刘 路,刘 霜,钱伟文,李汉钊,马慧莲,金仲和
(浙江大学 航空航天学院,杭州 310027)
陀螺仪是一种测量运动载体旋转角速度与姿态角度的惯性传感器,广泛应用于航空国防、石油勘探、交通导航、地震监测等多个领域。作为惯性测量单元的重要组成部分,陀螺仪的性能将直接影响惯性系统的整体性能。自1852年法国物理学家傅科首次提出陀螺仪概念以来,经过一百多年的发展,陀螺仪已经从传统的机械陀螺发展到目前包括激光陀螺、光纤陀螺、微机电系统陀螺、半球谐振式陀螺等多种新型陀螺仪。性能提升、小型化集成度的增高以及成本的降低,都使得陀螺仪的应用范围在不断扩大。相比于传统的机械转子式陀螺,光学陀螺本身不包含运动部件,不存在器件间的相互磨损,属于全固化陀螺仪,具有寿命长、抗冲击、低维护成本、大动态范围等诸多优势。谐振式光纤陀螺仪(Resonant Fiber Optic Gyroscope,RFOG)是一类基于无源光纤环形谐振腔来敏感转动信号的光学陀螺仪,自1977年S.Ezekiel和S.K.Balsmo首次提出并验证了RFOG的模型[1],历经数十年的研究,已经取得了突破性的进展。通过制备低损耗高清晰度的光纤环形谐振腔(Fiber Ring Resonator,FRR),RFOG理论上能够用短数十倍长度的光纤,实现与干涉式光纤陀螺仪(Interferometric Fiber Optic Gyroscope, IFOG)相同的检测精度。目前,国内外许多研究单位都投入到RFOG的相关研究上,并在光路设计、信号调制解调技术、激光频率闭环反馈以及谐振频率跟踪锁定等诸多方面取得了优异进展,目前RFOG的研究已经进入到原理样机的实现阶段[2-6]。本文介绍了一种应用于高精度集成化RFOG样机的同频调制解调技术,采用单个激光器作为探测光源,结构简单且互易性好,能够有效抑制激光器频率噪声和相位调制器残余强度调制对陀螺检测精度的影响,同时也有利用小型集成化样机的研制。
1 同频调制解调技术
在RFOG系统中,Sagnac效应的具体表现为当存在垂直于光纤环形谐振腔所在平面的转动时,谐振腔在顺时针(Clockwise, CW)和逆时针(Counterclockwise, CCW)光波的谐振频率之间会产生一个正比于转动角速度的偏差,简称谐振频差,通过测量这个谐振频差就可以得到转动角速度。Sagnac效应本身极为微弱,对于一个直径10 cm的谐振腔,1 °/h的转动信号产生的谐振频差约为0.2 Hz。因此,对于频段位于几百THz的激光而言,直接在光频域检测谐振频差是难以实现的,通常需借助调制解调的方法将光频域下变频至射频域,来完成谐振频差的鉴频并转化为角速度信号。在过去的研究中,为了抑制光纤环形谐振腔内的背向散射噪声,对输入谐振腔的顺逆时针两束光往往采用不同的调制频率,即差频调制解调技术[7,8]。虽然在该方案下,顺逆时针光在频域上没有重叠,通过后续的滤波就可以将背向散射信号滤除,然而不同频率的相位调制破坏了顺逆时针光路的互易性,使得实际测试得到的陀螺角度随机游走(Angular Random Walk, ARW)指标总是和探测器散粒噪声制约的理论灵敏度有一到二个数量级的差距。研究表明,造成陀螺精度恶化的主要原因是激光器频率噪声和相位调制器残余强度调制的影响,而采用同频调制解调技术[9],这两类噪声的影响都能够依靠高度互易的结构设计而被抵消,从而极大地提高陀螺的检测精度。
图1给出了基于同频调制解调技术的RFOG系统框图。激光器输出的光首先经过一个LiNbO3相位调制器(Phase Modulator, PM)PM0进行主调制,这里采用正弦波相位调制,然后被Y分支相位调制器均分成功率相等的两束激光,分别施加二次相位调制用于载波抑制。如图1所示,f1为主调制频率,f2和f3为二次调制对应频率,M1、M2和M3为调制系数,其中M2和M3需尽可能接近于2.405,以获得尽可能大的载波抑制。在经过二次调制后,两束光分别从CW和CCW方向进入FRR,经过多圈传输后由光电探测器(Photodetector, PD)PD2和PD1转化为电信号。探测到的两路电信号,其中一路经过同步解调和低通滤波(Low-Pass Filter, LPF)LPF2后,经过比例-积分(Proportional-Integral, PI)控制器反馈到激光器的频率调谐端,调制激光器中心频率使其跟踪锁定在谐振腔CW方向光波的谐振频率上;而CCW方向的光波则经过解调和滤波后成为陀螺输出,也可以作为误差信号实现第二闭环。
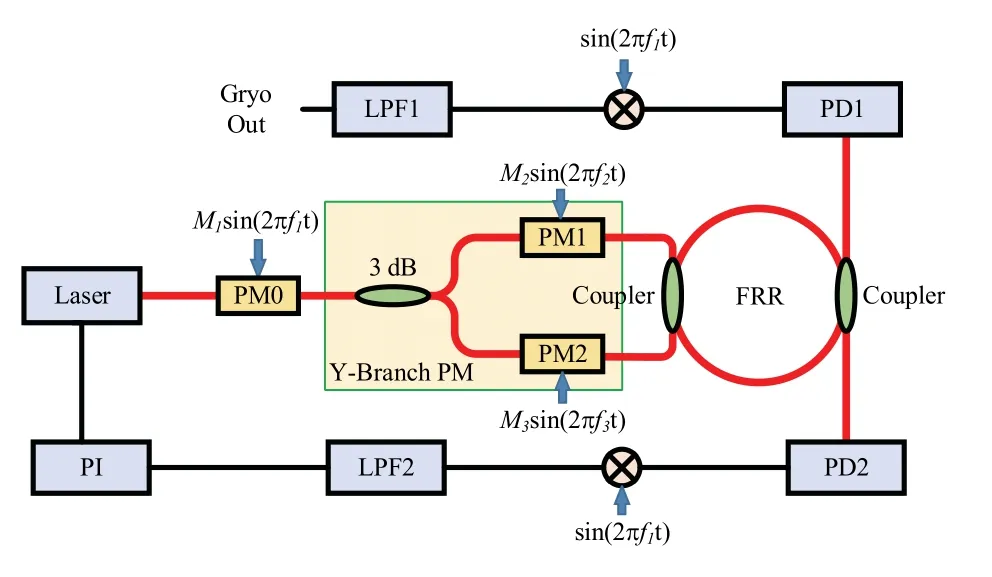
图1 基于同频调制解调技术的RFOG系统框图Fig.1 Schematic diagram of the RFOG based on the reciprocal modulation-demodulation technique.
在同频调制解调技术方案下,施加主调制信号的相位调制器PM0位于分束前,相位调制器的寄生强度调制对CW和CCW光波产生的解调误差完全一致,是一种互易性误差。因此,能够通过后续的激光频率锁定回路得到有效抑制。同样地,激光器频率噪声对RFOG的影响主要来自于调制频率偶倍频处的频率噪声[10],当CW和CCW光波采用相同频率的相位调制后,和调制频率紧密相关的激光器频率噪声也可以看作一种互易性噪声,同样地,这些互易性噪声都能够依靠激光锁定回路得到有效抑制。下面将从理论上推导在同频调制解调方案下,激光器频率噪声和相位调制器寄生强度调制影响被抑制的原理。
RFOG的解调输出能够反映激光器频率与该方向谐振频率的偏差信号,在谐振频率附近其偏差与解调输出近似呈线性关系。以CW方向的光波为例,在靠近谐振频率附近,解调输出可以表示为:

式中KCW为解调曲线在谐振频率处的斜率,fL和fR_cw分别为激光器输出激光的中心频率和CW方向光波的谐振频率。当考虑相位调制器寄生强度调制和激光器频率噪声的影响,式(1)改写为:

式中ΔVRAM_CW和ΔVLaser_CW分别为相位调制器寄生强度调制和激光器频率噪声在CW方向引入的解调误差。类似地,在CCW方向上的解调输出可以表示为:

式中,Kccw为CCW方向上的解调斜率,fR为该方向上的谐振频率,ΔVRAM_CCW和ΔVLaser_CCW分别为CCW方向上由于寄生强度调制和激光器频率噪声引入的解调误差。在同频调制解调方案下,由于在顺时针和逆时针光波上施加了相同的调制频率,同时在解调端,又采用相同的调制频率,因此有KCCW=KCW=K。更为重要的是,采用相同调制频率后激光器频率噪声的影响也处于相同的频段,因此ΔVLaser_CW=ΔVLaser_CCW;同时由于寄生强度调制噪声来源于同一个相位调制器,因此有ΔVRAM_CW=ΔVRAM_CCW。实际RFOG在工作时,激光器的中心频率始终锁定在谐振腔某一方向的谐振频率上,比如图1所示CW光波的谐振频率上,此时有:

将式(4)代入式(3),可以得到RFOG开环输出的表达式为:

从式(5)可知,利用互易的光路设计、相同的调制解调频率以及激光器中心频率的跟踪锁定后,激光器频率噪声和相位调制器寄生强度调制的影响在陀螺输出端得到了有效的消除。
我们前期也在实验上对同频调制解调技术进行了验证[11],结果表明,影响RFOG角度随机游走的各类光学噪声得到了很好的抑制。在实验中,随着PD处探测功率的增加,测试得到的ARW与探测功率的平方近似呈反比关系,说明实测陀螺仪指标已经接近于散粒噪声限制的极限灵敏度。图2为探测器功率达到69 μW时,陀螺仪输出对应的角速度噪声功率谱密度SΩ与频率f的关系曲线[11]。图中白噪声频段的功率谱密度为0.033 (°/h)2/Hz,对应的ARW为0.0021 °/√h。
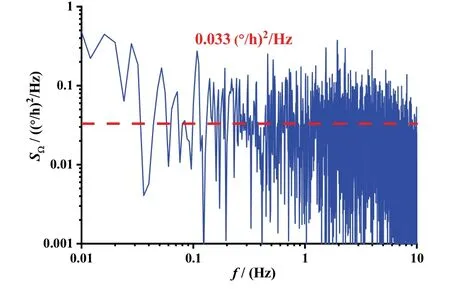
图2 陀螺仪输出角速度噪声功率谱密度Fig.2 Rotation-velocity power spectral density of the gyro output.
2 基于同频调制解调技术的RFOG样机
同频调制解调技术的应用,极大地提高了陀螺仪的角度随机游走指标,更有利于充分发挥RFOG在小型化和高精度上的优势。实验结果表明,基于同频调制技术的RFOG系统,在总长为29米的光纤谐振腔上,当激光探测功率为15 μW时,测试得到的ARW为0.0052 °/,接近于探测器散粒噪声制约的RFOG极限灵敏度[9];当激光功率提高到69 μW时,测试得到的ARW为0.0021 °/[11]。此外,该方案的另一个优势是系统结构简单,光学噪声的抑制主要依赖于系统的互易性结构设计,而非增加额外的光学器件或控制环路,从而造成系统鲁棒性的降低。同时,相比目前较为主流的多激光器拍频方案[12-15],由于只需要使用一个激光器作为探测光源,对激光器的工作波长没有苛刻要求,同时也不需要使用高精度的光学锁相环技术,有利于降低成本、提高集成度。本单位基于上述同频调制解调技术研制了集成化RFOG样机,并在图1基础上加入了第二闭环,样机系统架构原理图如图3所示。
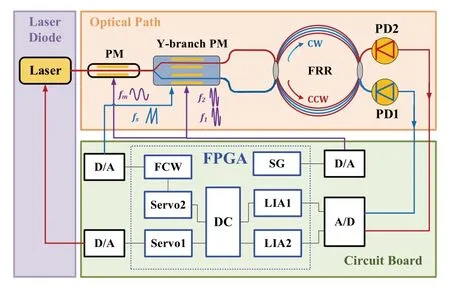
图3 RFOG样机系统架构原理图Fig.3 System diagram of the RFOG prototype.
为了避免信号间的相互干扰,同时尽可能保证样机内部的温度稳定性,样机内部采用分层设计,从底部往上依次为:激光器模块、信号处理电路以及无源光路层,无源光路层放置在最上层,有利于快速达到热平衡状态。样机中的光纤环形谐振腔总长度为23 m,直径约为12 cm。样机的实物如图4所示,尺寸为7 cm ×7cm ×15 cm。由于目前样机处于原理验证的阶段,内部仍有较大的冗余空间,这是为了便于初步的调试和组装。激光器目前采用的是RIO公司生产的超窄线宽半导体激光器模块,如果采用14引脚封装的激光器管芯,将会在很大程度上减小样机的体积。

图4 RFOG样机实物图Fig.4 Picture of the assembled prototype.
图5与图6给出了样机1小时的常温静态测试结果,并对其进行了Allan方差分析。图6中同时给出了Honeywell公司研制的基于三光源拍频检测方案腔长为100米的RFOG样机的Allan方差曲线[12]。
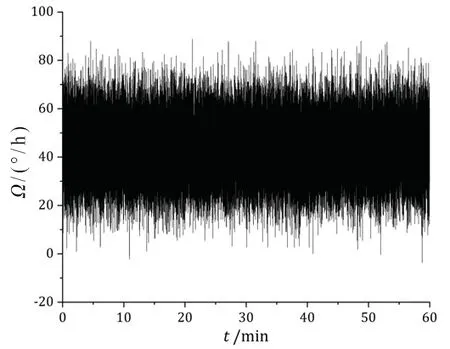
图5 RFOG样机1小时静态测试结果Fig.5 The gyro output of 1-hour static test
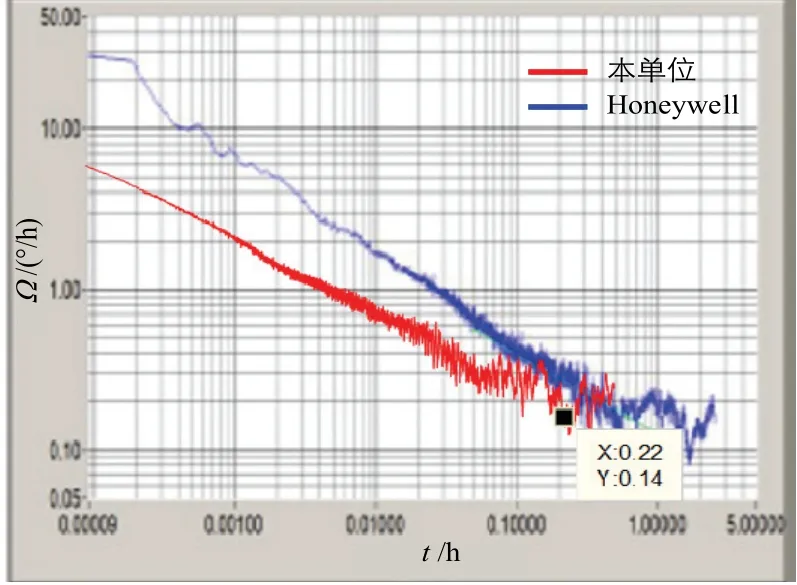
图6 Allan方差曲线对比Fig.6 Comparison of the Allan deviation curves.
从Allan方差曲线可以看到,本单位研制的样机零偏不稳定性约为0.14 °/h,ARW约为与Honeywell公司研制的样机相比,零偏不稳定性指标基本处于相同的水平,但在ARW上具有明显的优势。与实验室条件下的静态测试结果相比,ARW有所降低,主要是由于样机中采用的PD管芯限制了探测的峰值光功率,此外在双路闭环系统的第二环路中,锯齿波调制波形的非理想也会恶化陀螺仪的随机噪声。
另外,对样机的标度因数非线性度也进行了测试。样机被放置在一个高精度的单轴转台上,角速度范围为 ± 200 °/s,顺逆时针交替转动,陀螺仪输出结果如图7所示(已省略转台加速度过程)。根据国家军用标准中给出的计算方法,陀螺仪的标度因数非线性度为231.8 ppm。
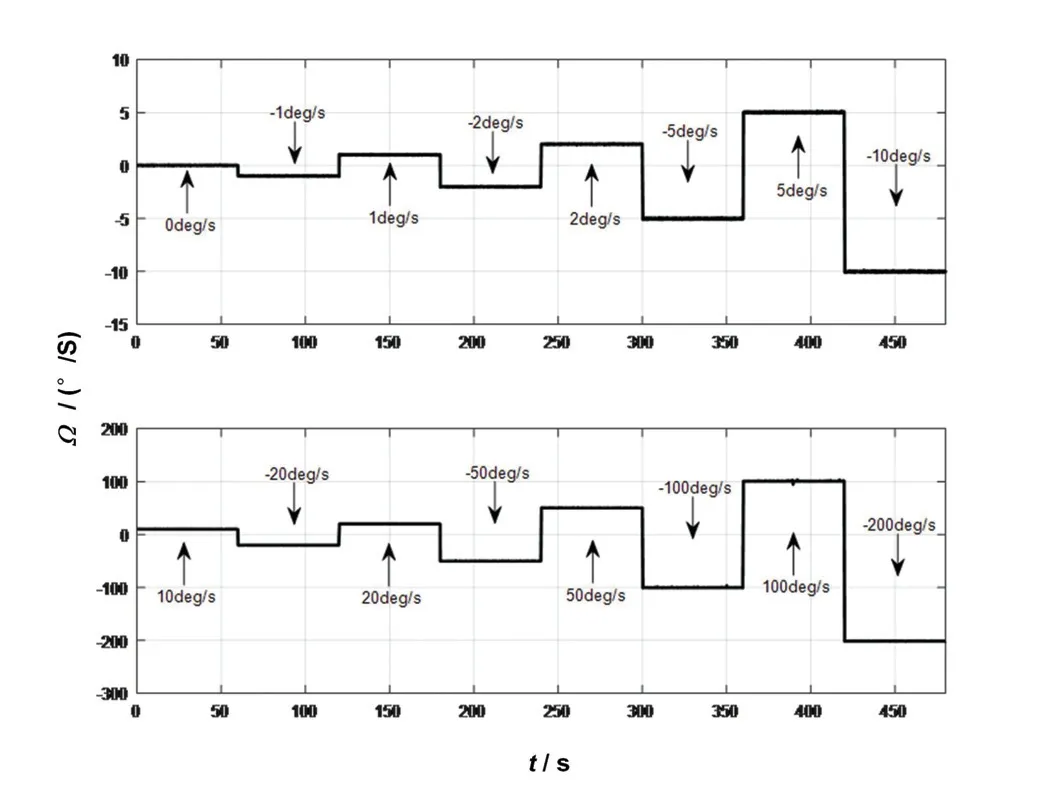
图7 标度因数非线性测试Fig.7 Test of the scale factor nonlinearity.
3 结 论
本文介绍了基于同频调制解调技术的RFOG系统方案及应用该方案实现的RFOG样机。同频调制解调技术能够很好地抑制RFOG系统中激光器频率噪声和相位调制器残余强度调制的影响,极大地提高陀螺仪的检测精度。同时,该方案所需的光学器件少,系统结构相对简单,有利于RFOG的集成化和市场化。目前,RFOG样机的尺寸还有很大的优化空间,例如激光器管芯与信号处理电路板的集成,光纤谐振腔前光路的集成等,这将在很大程度上减小RFOG的体积。因此,谐振式光纤陀螺仪有成为下一代高精度、小型化光学惯性传感器的潜力。
猜你喜欢
北京航空航天大学学报(2021年9期)2021-11-02 08:24:32
电子制作(2019年15期)2019-08-27 01:12:08
电子测试(2018年11期)2018-06-26 05:56:12
百科探秘·航空航天(2017年9期)2017-12-31 07:24:12
山东工业技术(2016年15期)2016-12-01 05:32:01
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
长春理工大学学报(自然科学版)(2015年6期)2015-10-12 05:22:38
空间控制技术与应用(2015年4期)2015-06-05 12:22:40
声学技术(2014年1期)2014-06-21 06:56:26
智能计算机与应用(2014年6期)2014-04-29 00:44:03