颈椎单开门成形微钛板固定稳定性的有限元分析
2021-11-29 08:20许占江
中国矫形外科杂志 2021年22期
王 鹏,汤 猛,周 立,许占江,杨 锴
(郑州大学附属郑州中心医院骨科,河南郑州450000)
颈椎后路单开门椎管成形术后5.2%~80%患者会残留颈项部的疼痛、僵硬等轴性症状[1]。导致患者术后轴性症状的因素较多,如颈后韧带复合体损伤[2]、椎旁肌肉组织剥离、C3及C7椎板处理方式等[3],虽然微型钛板的应用为开门后椎板提供早期稳定,能够显著减少短期内轴性症状的发生[4],但有学者认为C3椎板切除不仅能够扩大C2~3棘突之间空间,避免C3棘突开门侧屈后形成的潜在骨性撞击风险,而且能够有效的保护颈后肌群,减小门轴侧颈后肌群在C2止点附近的压迫,导致颈部运动性疼痛[5]。陈育岳等[6]采用C3椎板切除与微型钛板固定相结合的方法治疗43例脊髓型颈椎病患者,术后6个月随访显示该方案能够有效的改善术后颈椎活动度。本文采用有限元分析的方法,研究微型钛板联合C3椎板切对颈椎单开门术后颈椎稳定性及应力分布的影响,以期为临床正确的认识和开展提供理论依据。
1 资料与方法
1.1 颈椎后路单开门术后有限元模型的建立
选取在本院骨科行颈椎后路单开门术治疗的2例CSM患者为研究对象,分别采取传统C3~6节段椎板单开门成形联合微型钛板固定及C3椎板切除、C4~6椎板单开门微型钛板固定。随机选取1名正常成人志愿者颈椎为对照。纳入标准:符合颈椎后路椎板成形的手术指证、颈部无发育畸形、无外伤及手术史、颈椎屈伸位X线检查无颈椎不稳的影像学表现。本研究开始前经本院医学伦理委员会批准,纳入研究的对象均签署知情同意书。
上述研究对象颈椎螺旋CT(C0~T1),将CT图像导入医学图像处理软件Mimics 17.0,依据椎体的灰度值,重建颈椎骨骼的三维几何模型,以点云格式导入逆向工程软件Geomagic 12.0中,通过其中三角片构建、表面光滑、曲率识别等功能,将每个椎体表面封闭为1个完整的椎体模型。以IGES格式导入有限元前处理软件Hypermesh 12.0中,对椎体模型的表面划分2D网格单元,通过对特定区域2D单元的复制、偏移,重新构建出椎间盘的纤维环、髓核、小关节软骨等解剖结构。由于微型钛板在CT扫描过程中,影像噪声较大,无法通过Mimics软件进行识别重建。本研究中根据术前厂家提供的参数及术中实用的微型钛板型号(威高公司,双弯型钛板),通过Cero 3.0中进行重新设计。建立正常对照模型,C3~6节段椎板单开门成形+微型钛板固定模型(C3~6lami⁃noplasty and mini plate fixation,C3~6LP),以及 C3椎板切除和C4~6椎板单开门微型钛板固定模型(C3lami⁃nectomy and C4~6laminoplasty mini plate fixation,C3LELP)。如图 1。

图1 本研究建立的有限元模型 1a:正常对照模型 1b:C3~6LP模型 1c:C3LE-LP模型
在Hypermesh 12.0中,依据颈椎周围韧带的解剖学止点,重建前纵韧带、后纵韧带、黄韧带、棘间韧带等主要的韧带结构。采用Spring单元进行模拟建立颈半棘肌、多裂肌、头夹肌三条主要肌群。各种材料均视为各向同性线弹性材料,其力学属性见表1。

表1 有限元模型中各结构的材料力学参数[7]
1.2 边界条件及工况
在标准坐标系中调整模型姿态,将坐标原点设定在C7椎体下表面中点,约束C7下表面所有节点的6个自由度,作为边界条件。X-Y平面为横断面、X-Z为冠状面、Y-Z为矢状面。在C2上表面几何中心建立参照点,使该节点与C2上表面所有节点之间建立耦合关系,添加50 N载荷模拟头部重量。在不同轴线分别添加1.5 N·m扭矩,模拟颈椎的前屈、后伸、侧屈运动。导入有限元计算软件Abaqus 6.12中进行运算及后处理。
1.3 评价指标
观察指标:(1)颈椎的活动度测量:测量加载前后C2椎体后缘与C7椎体后缘延长线的夹角,重复测量15次;(2)椎间隙活动度:测量加载前后上下终板之间的夹角,重复测量15次;(3)分别选取各椎间盘的30个代表性节点,计算前屈、后伸、侧屈载荷状态下节点的Von Mises应力。
1.4 统计学方法
采用SPSS 22.0进行数据分析,各节点的Von Mises应力数据以±s表示,多组间比较采用单因素方差分析(One-Way ANOVA),两组间比较采用LSD法。各角度的比较采用数学比值法进行计算。P<0.05为差异有统计学意义。
2 结果
2.1 模型的有效性验证
本研究采用患者CT图像建立正常成人及颈椎单开门术后的有限元模型,共107 969节点,546 412单元。具有高度的外观相似性。对正常模型进行载荷预实验,结果显示,在1.5 N·m前屈扭矩作用下,陈群响等[7]模型中 C3~4、C4~5、C5~6的活动度分别为4.8°、5.1°、4.2°,赵改平等[8]模型为 5.2°、4.7°、4.1°,本组模型分别为 4.91°、4.62°、4.10°。在同样后伸扭矩作用下C3~4、C4~5、C5~6的活动度分别为5.3°、6.4°、4.1°[7]及 4.7°、4.0°、3.7°[8],本模型分别为5.65°、4.70°、4.38°。上述各节段的活动度均在文献报告的活动范围内。
2.2 不同载荷下颈椎有限元模型活动度分析
不同载荷下,颈椎活动度(range of motion,ROM)测量结果见表2,前屈、后伸及旋转载荷下,C3~6LP模型、C3LE-LP模型的ROM均显著小于正常模型,差异有统计学意义(P<0.05)。在前屈、后伸及旋转载荷下,C3LE-LP模型的ROM显著大于C3~6LP模型,差异有统计学意义(P<0.05)。
表2 不同载荷下3个模型各节段的活动度(n=15,°,±s)与比较

表2 不同载荷下3个模型各节段的活动度(n=15,°,±s)与比较
正常模型C 3~6 L P模型C 3 L E-L P模型P值指标前屈载荷C 2~3 C 3~4 C 4~5 C 5~6 C 6~7 P值总R O M 8.1 3±0.5 2 6.6 5±0.7 1 7.7 0±0.5 9 6.3 8±0.5 6 5.7 1±0.3 7<0.0 0 1 3 2.5 7±1.0 8 6.2 6±0.2 1 5.4 8±0.3 4 5.5 9±0.7 1 5.0 8±0.4 3 4.2 1±0.2 9<0.0 0 1 2 5.8 3±1.2 4 9.4 1±0.2 2 7.2 5±0.5 8 5.1 7±0.4 6 4.0 7±0.4 4 4.2 4±0.3 0<0.0 0 1 2 9.1 4±1.1 7<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1
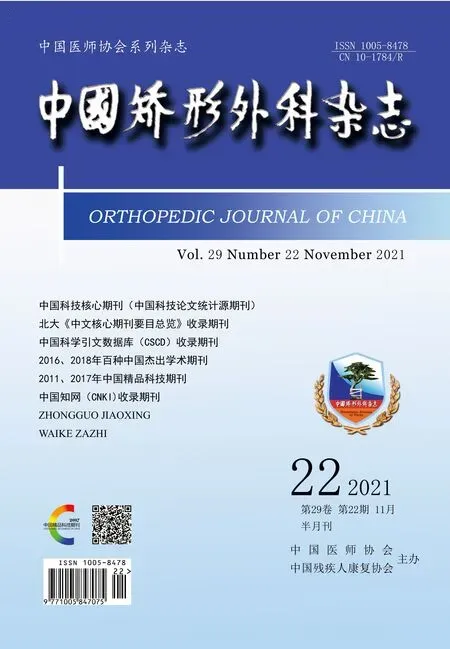
2.3 不同载荷下各模型颈椎间盘应力比较
在前屈载荷下,3个模型中C2~3、C3~4椎间盘应力比较差异无统计学意义(P>0.05),C4~5、C5~6、C6~7椎间盘应力比较,C3~6LP模型显著大于C3LE-LP模型及正常对照模型,差异有统计学意义(P<0.05),而C3LE-LP模型及正常对照模型之间比较,差异无统计学意义(P>0.05)。
在后伸载荷下,C3~6LP模型中各椎间盘应力均显著大于C3LE-LP模型及正常对照模型,差异有统计学意义(P<0.05),而C3LE-LP模型及正常对照模型比较,差异无统计学意义(P>0.05)。
侧屈载荷下,3个模型椎间盘的应力比较差异均无统计学意义(P>0.05)(表3)。
表3 不同载荷下3个模型各节段椎间盘应力测量结果(n=30,MPa,±s)与比较
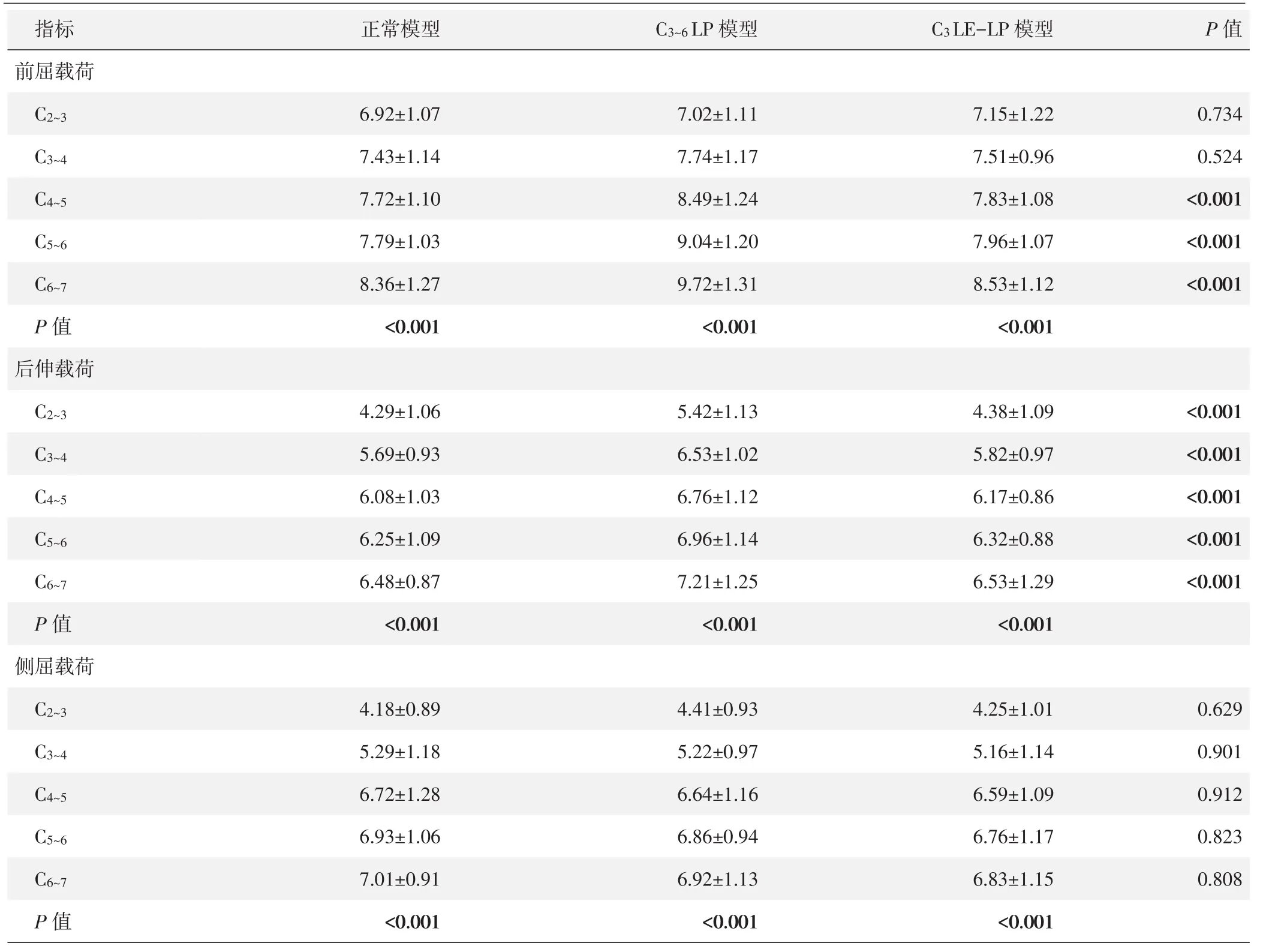
表3 不同载荷下3个模型各节段椎间盘应力测量结果(n=30,MPa,±s)与比较
正常模型C 3~6 L P模型C 3 L E-L P模型P值指标前屈载荷C 2~3 C 3~4 C 4~5 C 5~6 C 6~7 7.0 2±1.1 1 7.7 4±1.1 7 8.4 9±1.2 4 9.0 4±1.2 0 9.7 2±1.3 1<0.0 0 1 6.9 2±1.0 7 7.4 3±1.1 4 7.7 2±1.1 0 7.7 9±1.0 3 8.3 6±1.2 7<0.0 0 1 7.1 5±1.2 2 7.5 1±0.9 6 7.8 3±1.0 8 7.9 6±1.0 7 8.5 3±1.1 2<0.0 0 1 0.7 3 4 0.5 2 4<0.0 0 1<0.0 0 1<0.0 0 1 P值后伸载荷C 2~3 C 3~4 C 4~5 C 5~6 C 6~7<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1 P值侧屈载荷4.2 9±1.0 6 5.6 9±0.9 3 6.0 8±1.0 3 6.2 5±1.0 9 6.4 8±0.8 7<0.0 0 1 5.4 2±1.1 3 6.5 3±1.0 2 6.7 6±1.1 2 6.9 6±1.1 4 7.2 1±1.2 5<0.0 0 1 4.3 8±1.0 9 5.8 2±0.9 7 6.1 7±0.8 6 6.3 2±0.8 8 6.5 3±1.2 9<0.0 0 1 C 2~3 C 3~4 C 4~5 C 5~6 C 6~7 4.1 8±0.8 9 5.2 9±1.1 8 6.7 2±1.2 8 6.9 3±1.0 6 7.0 1±0.9 1<0.0 0 1 4.4 1±0.9 3 5.2 2±0.9 7 6.6 4±1.1 6 6.8 6±0.9 4 6.9 2±1.1 3<0.0 0 1 4.2 5±1.0 1 5.1 6±1.1 4 6.5 9±1.0 9 6.7 6±1.1 7 6.8 3±1.1 5<0.0 0 1 0.6 2 9 0.9 0 1 0.9 1 2 0.8 2 3 0.8 0 8 P值
续表2 不同载荷下3个模型各节段的活动度(n=15,°,±s)与比较
续表2 不同载荷下3个模型各节段的活动度(n=15,°,±s)与比较
P值后伸载荷C 2~3 C 3~4 C 4~5 C 5~6 C 6~7 P值总R O M侧屈载荷3.7 2±0.3 8 4.9 1±0.5 5 4.6 2±0.4 7 4.1 6±0.4 1 3.5 7±0.3 2<0.0 0 1 2 0.9 2±1.8 2 2.4 3±0.1 9 3.2 2±0.4 2 3.5 1±0.3 3 3.1 4±0.2 7 2.5 2±0.1 9<0.0 0 1 1 5.5 7±1.1 7 3.2 7±0.2 5 3.9 3±0.3 9 3.7 9±0.5 2 3.6 4±0.3 0 3.1 1±0.2 6<0.0 0 1 1 7.9 4±1.3 5<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1 C 2~3 C 3~4 C 4~5 C 5~6 C 6~7 P值总R O M 5.8 3±0.9 2 4.1 1±0.4 3 3.5 0±0.2 2 3.4 4±0.4 0 3.1 7±0.3 4<0.0 0 1 1 8.6 4±0.9 5 4.4 8±0.6 5 3.2 2±0.5 2 3.1 1±0.3 1 3.0 2±0.4 5 2.2 6±0.2 0<0.0 0 1 1 5.0 9±1.3 1 5.5 6±0.7 3 3.9 6±0.4 1 3.3 8±0.3 9 3.2 6±0.2 8 2.8 3±0.3 1<0.0 0 1 1 5.8 9±1.5 2<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1<0.0 0 1
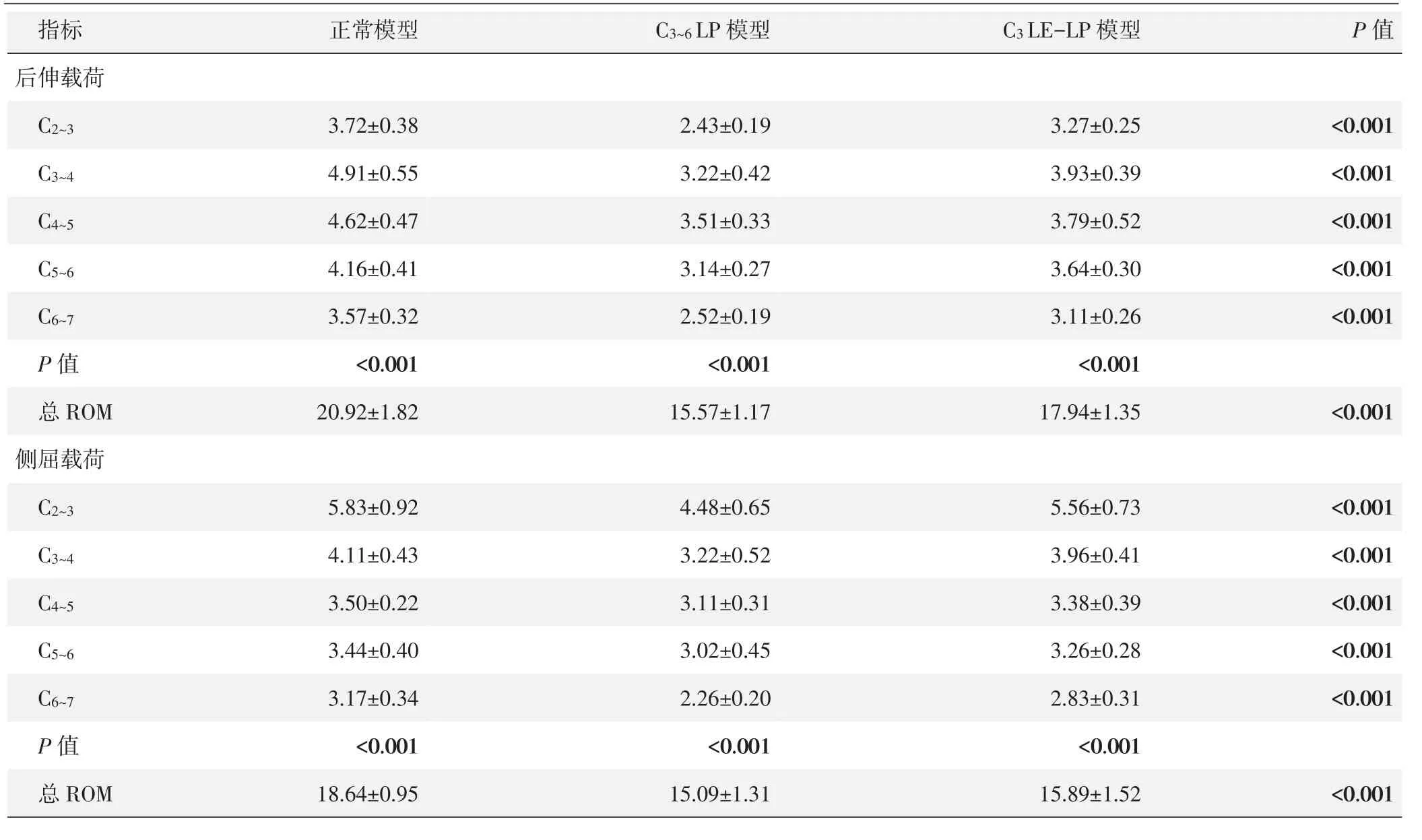
图2 不同状态下椎间盘应力分布 2a:正常对照模型前屈载荷下椎间盘的应力分布 2b:C3LE-LP模型前屈载荷下椎间盘的应力分布 2c:C3~6LP模型前屈载荷下椎间盘的应力分布 2d:正常对照模型后伸载荷下椎间盘的应力分布 2e:C3LE-LP模型后伸载荷下椎间盘的应力分布 2f:C3~6LP模型后伸载荷下椎间盘的应力分布 2g:正常对照模型侧屈载荷下椎间盘的应力分布 2h:C3LE-LP模型侧屈载荷下椎间盘的应力分布 2i:C3~6LP模型侧屈载荷下椎间盘的应力分布
3 讨论
颈椎后路椎板成形术后出现的轴性症状与术中广泛剥离两侧椎旁肌及颈后韧带符合体损伤有关,其中颈半棘肌为颈部主要的伸肌装置提供37%颈部后伸力矩[9]。标准椎管成形术椎板开门节段为C3~6,术中需切除C2椎板及棘突下部,部分或完全剥离颈半棘肌的C2止点,以方便侧屈C3椎板。为保留C2~3软组织连续性,特别是颈半棘肌止点,人们设计了多种不同的方案,如李玉伟等[10]采用保留C2、3棘突肌肉附着点的改良颈椎管扩大成形术,以最大限度减少颈后软组织破坏。Kotani等[11]研究发现通过切除C3椎板有利于减小开门椎板对颈半棘肌的干扰,明显降低术后轴性症状。Lee[12]发现切除C3椎板能够避免C2~3棘突骨性融合。本研究采用有限元分析的方法,建立C3椎板成形和切除的颈椎计算机模型,通过添加前屈、后伸、侧屈三种不同载荷,观察颈椎活动度及应力分布的差异。
本研究对正常颈椎模型、C3~6LP模型、C3LE-LP模型进行载荷试验,观察3个模型中颈椎各间盘的总活动度,结果显示前屈载荷下,C3~6LP模型及C3LELP模型与正常模型比较分别减小25.57%和14.24%。后伸载荷下,C3~6LP模型及C3LE-LP模型与正常模型比较分别减小29.86%和15.19%。扭转载荷下,C3~6LP模型及C3LE-LP模型分别减少3.48%和4.02%。其中C2~3、C3~4节段减少幅度占总减少率为47.99%~61.18%。进一步观察各节段椎间盘的应力显示,在前屈载荷下,3个模型中C2~3、C3~4椎间盘应力比较差异无统计学意义,C4~5、C5~6、C6~7椎间盘应力比较,C3~6LP模型显著大于C3LE-LP模型及正常对照模型。在后伸载荷下,C3~6LP模型中各椎间盘应力均显著大于C3LE-LP模型及正常对照模型。侧屈载荷下,3个模型椎间盘的应力比较差异无统计学意义。上述结果提示,C3~6LP模型中,由于缺少后方深层肌肉韧带协调,颈椎在屈伸过程活动度减少,使得颈椎的各节段的“链条样”协调运动减弱,而形成以远端颈椎为支点、颈后浅层肌肉为吊索的僵硬摇摆运动,从而导致C5~6、C6~7椎间盘的代偿性应力增加。在C3LE-LP模型中,通过潜行切除C3椎板,以保留颈后深层韧带韧带的连续性及颈半棘肌的C2止点,能够继续维持颈椎的接近正常的运动状态。
综上所述,微型钛板联合C3椎板切除不仅能够维持开门后椎板的稳定性,而且保留颈后韧带及颈半棘肌的连续性,有效减少中下段颈椎间盘的代偿性应力,避免颈椎前凸的丢失。本研究仍有以下几个方面的局限性。首先,由于人体C2、3棘突形态多样,无法精确测量在运动过程中两者距离变化,而在有些患者中,该指标可能是影响颈椎后伸运动的关键因素。其次,限于研究方向,本研究未设计C7棘突的处理方式,通常该棘突是椎板成形的远端,该位置处理方式的不同亦可能影响颈后软组织连续性,这些问题将在之后的研究中进一步完善。
猜你喜欢
中国伤残医学(2022年14期)2022-12-23
现代临床医学(2021年5期)2021-11-02
武警医学(2018年10期)2018-11-06
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年5期)2016-05-17
中国继续医学教育(2015年3期)2016-01-06
中国医疗美容(2015年1期)2015-07-12
中国当代医药(2015年31期)2015-03-01
安徽医专学报(2014年6期)2014-03-20
河南医学研究(2014年3期)2014-02-27